Towards Functional Mobile Microrobotic Systems

 , , ,
, , ,
Abstract
1. Introduction
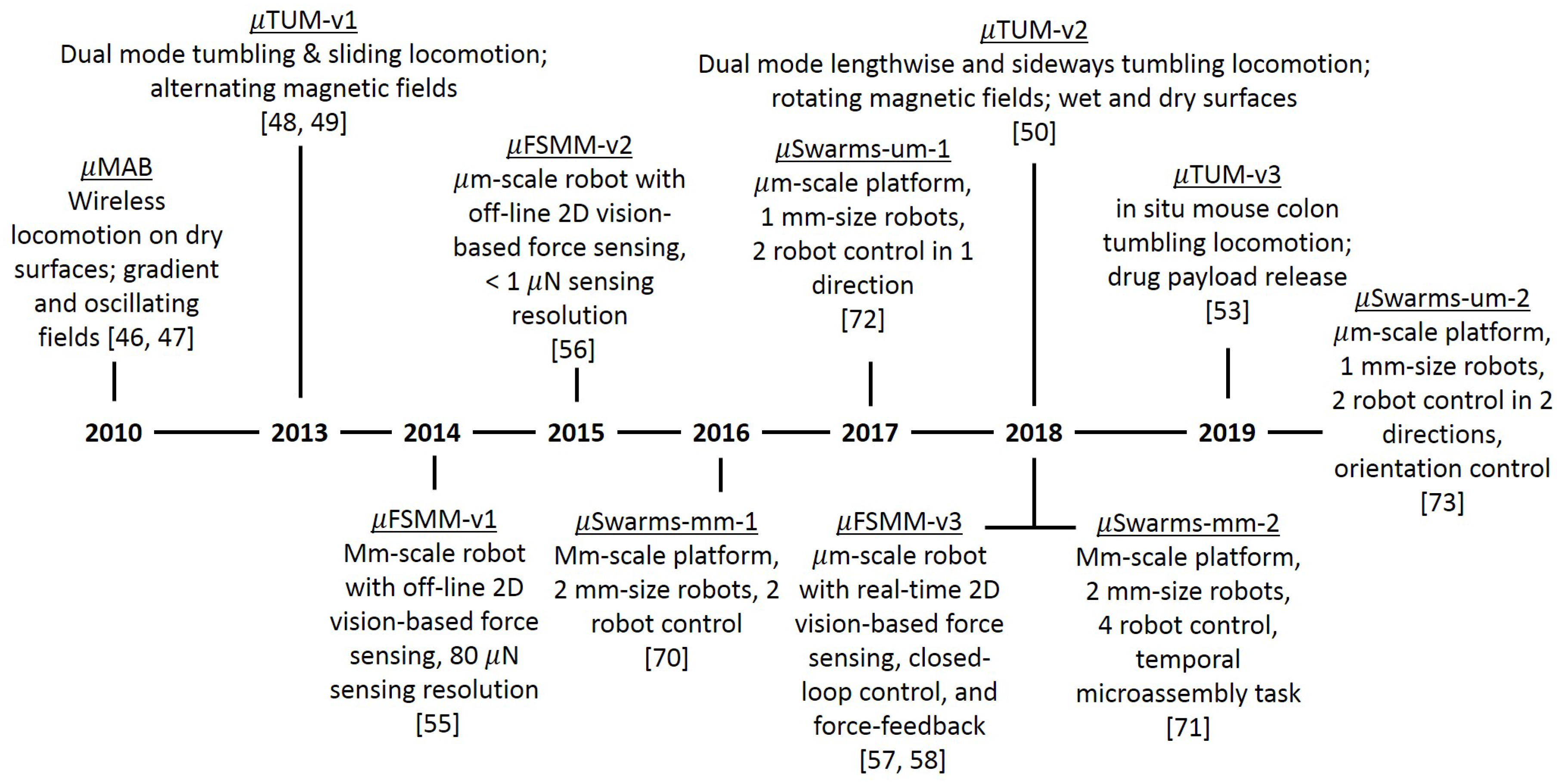
2. Magnetostrictive Asymmetric Thin Film Bimorph Microrobot (MAB)
3. Micro-Scale Tumbling Magnetic Microrobot (TUM)
3.1. Microrobot Design Overview
3.2. TUM Mobility Experiments
3.3. TUM Biomedical Applications
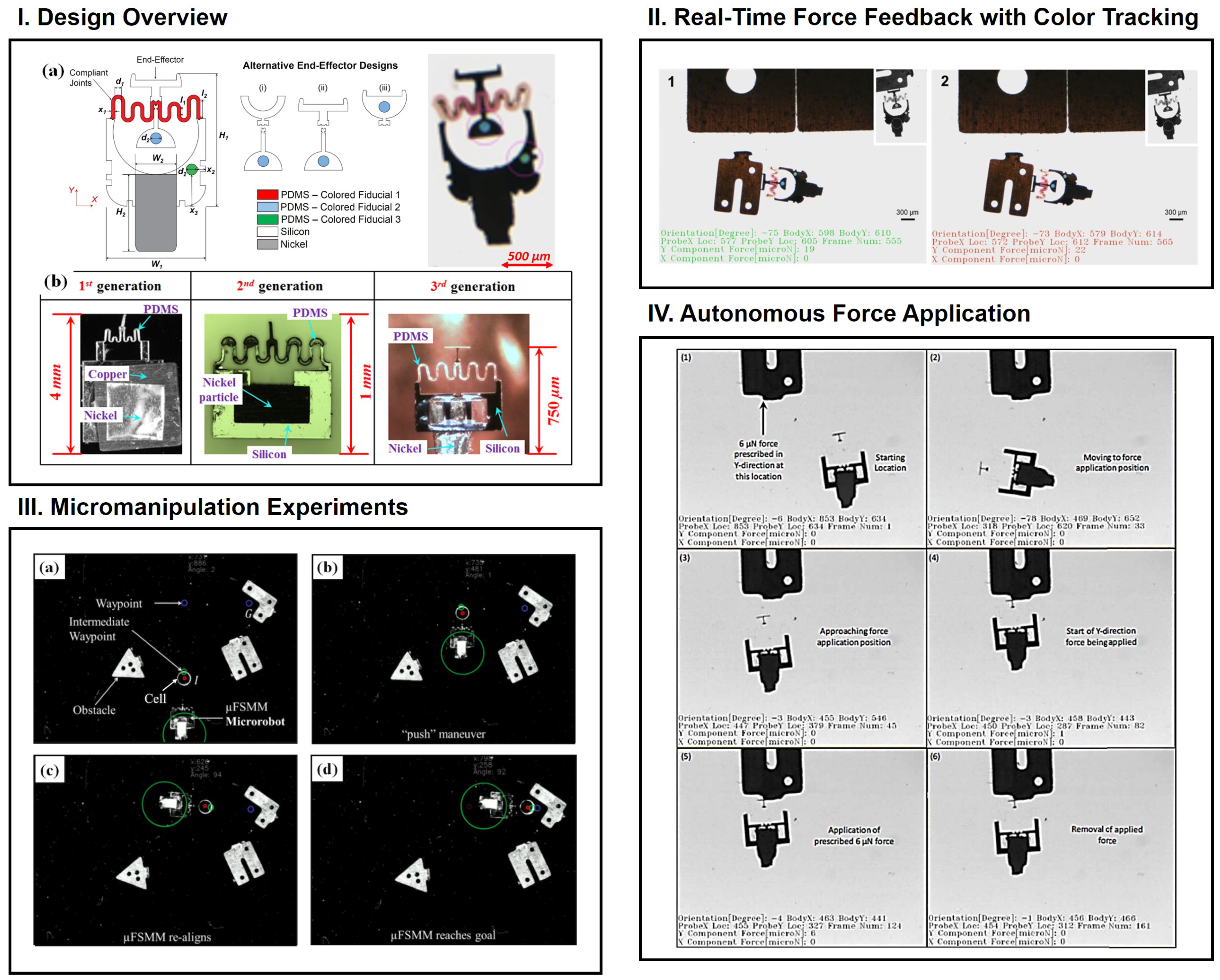
4. Micro-Force Sensing Mobile Microrobots (FSMM)
4.1. Overview of the Microrobot Design
4.2. Microrobot Capabilities and Applications
5. Independently Controllable Microswarms
6. Conclusions and Future Outlook
Funding
Conflicts of Interest
References
- Donald, B.; Levey, C.; McGray, C.; Paprotny, I.; Rus, D. An Untethered, Electrostatic, Globally Controllable MEMS Micro-Robot. J. Microelectromech. Syst. 2006, 15, 1–15. [Google Scholar] [CrossRef]
- Contreras, D.S.; Pister, K.S.J.; Sensor, B.; Center, A. Dynamics of Electrostatic Inchworm Motors for Silicon Microrobots. In Proceedings of the 2017 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Montreal, QC, Canada, 17–21 July 2017. [Google Scholar]
- Rodrigues, J.L.; Almeida, R.A.; Dente, J.A.; Branco, P.C. Review of Recent Patents with Applications of Ionic Polymer-Metal Composites (IPMCs). Recent Patents Electr. Electron. Eng. 2011, 4, 10–15. [Google Scholar] [CrossRef]
- Kim, S.J.; Pugal, D.; Wong, J.; Kim, K.J.; Yim, W. A bio-inspired multi degree of freedom actuator based on a novel cylindrical ionic polymer-metal composite material. In Proceedings of the 2011 15th International Conference on Advanced Robotics (ICAR), Tallinn, Estonia, 20–23 June 2011; pp. 435–440. [Google Scholar] [CrossRef]
- Fang, B.K.; Lin, C.C.K.; Ju, M.S. Development of sensing/actuating ionic polymer–metal composite (IPMC) for active guide-wire system. Sens. Actuators A Phys. 2010, 158, 1–9. [Google Scholar] [CrossRef]
- He, Q.; Yang, X.; Wang, Z.; Zhao, J.; Yu, M.; Hu, Z.; Dai, Z. Advanced Electro-active Dry Adhesive Actuated by an Artificial Muscle Constructed from an Ionic Polymer Metal Composite Reinforced with Nitrogen-doped Carbon Nanocages. J. Bionic Eng. 2017, 14, 567–578. [Google Scholar] [CrossRef]
- Aw, K.C.; McDaid, A.J. Bio-applications of ionic polymer metal composite transducers. Smart Mater. Struct. 2014, 23, 074005. [Google Scholar] [CrossRef]
- Frutiger, D.R.; Vollmers, K.; Kratochvil, B.E.; Nelson, B.J. Small, Fast, and Under Control: Wireless Resonant Magnetic Micro-agents. Int. J. Robot. Res. 2010, 29, 613–636. [Google Scholar] [CrossRef]
- Pawashe, C.; Floyd, S.; Sitti, M. Modeling and Experimental Characterization of an Untethered Magnetic Micro-Robot. Int. J. Robot. Res. 2009, 28, 1077–1094. [Google Scholar] [CrossRef]
- Kim, S.; Lee, S.; Lee, J.; Nelson, B.J.; Zhang, L.; Choi, H. Fabrication and Manipulation of Ciliary Microrobots with Non-reciprocal Magnetic Actuation. Sci. Rep. 2016, 6, 30713. [Google Scholar] [CrossRef]
- Dreyfus, R.; Baudry, J.; Roper, M.L.; Fermigier, M.; Stone, H.A.; Bibette, J. Microscopic artificial swimmers. Nature 2005, 862–865. [Google Scholar] [CrossRef]
- Fu, Q.; Guo, S.; Yamauchi, Y.; Hirata, H.; Ishihara, H. A novel hybrid microrobot using rotational magnetic field for medical applications. Biomed. Microdevices 2015, 17, 31. [Google Scholar] [CrossRef]
- Hu, W.; Ishii, K.S.; Fan, Q.; Ohta, A.T. Hydrogel microrobots actuated by optically generated vapour bubbles. Lab Chip 2012, 12, 3821. [Google Scholar] [CrossRef] [PubMed]
- Hu, W.; Fan, Q.; Ohta, A.T. Interactive actuation of multiple opto-thermocapillary flow-addressed bubble microrobots. Robot. Biomim. 2014, 1, 14. [Google Scholar] [CrossRef] [PubMed]
- Hu, W.; Ishii, K.S.; Ohta, A.T. Micro-assembly using optically controlled bubble microrobots. Appl. Phys. Lett. 2011, 99, 094103. [Google Scholar] [CrossRef]
- Thakur, A.; Chowdhury, S.; Švec, P.; Wang, C.; Losert, W.; Gupta, S.K. Indirect pushing based automated micromanipulation of biological cells using optical tweezers. Int. J. Robot. Res. 2014, 33, 1098–1111. [Google Scholar] [CrossRef]
- Banerjee, A.; Chowdhury, S.; Gupta, S.K. Optical Tweezers: Autonomous Robots for the Manipulation of Biological Cells. IEEE Robot. Autom. Mag. 2014, 21, 81–88. [Google Scholar] [CrossRef]
- Glückstad, J.; Villangca, M.J.; Palima, D.Z.; Bañas, A. General rights Light-actuated microrobots for biomedical science. SPIE Newsroom 2017. [Google Scholar] [CrossRef]
- Chowdhury, S.; Svec, P.; Wang, C.; Seale, K.T.; Wikswo, J.P.; Losert, W.; Gupta, S.K. Automated Cell Transport in Optical Tweezers-Assisted Microfluidic Chambers. IEEE Trans. Autom. Sci. Eng. 2013, 10, 980–989. [Google Scholar] [CrossRef]
- Behkam, B.; Sitti, M. Bacterial flagella-based propulsion and on/off motion control of microscale objects. Appl. Phys. Lett. 2007, 90, 023902. [Google Scholar] [CrossRef]
- Steager, E.B.; Sakar, M.S.; Kim, D.H.; Kumar, V.; Pappas, G.J.; Kim, M.J. Electrokinetic and optical control of bacterial microrobots. J. Micromech. Microeng. 2011, 21, 035001. [Google Scholar] [CrossRef]
- Martel, S.; Felfoul, O.; Mathieu, J.B.; Chanu, A.; Tamaz, S.; Mohammadi, M.; Mankiewicz, M.; Tabatabaei, N. MRI-based Medical Nanorobotic Platform for the Control of Magnetic Nanoparticles and Flagellated Bacteria for Target Interventions in Human Capillaries. Int. J. Robot. Res. 2009, 28, 1169–1182. [Google Scholar] [CrossRef]
- Kim, D.H.; Kim, P.S.S.; Julius, A.A.; Kim, M.J. Three-dimensional control of engineered motile cellular microrobots. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 721–726. [Google Scholar] [CrossRef]
- Martel, S.; Mohammadi, M. Using a swarm of self-propelled natural microrobots in the form of flagellated bacteria to perform complex micro-assembly tasks. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 500–505. [Google Scholar] [CrossRef]
- Chen, C.; Karshalev, E.; Guan, J.; Wang, J. Magnesium-Based Micromotors: Water-Powered Propulsion, Multifunctionality, and Biomedical and Environmental Applications. Small 2018, 14, 1704252. [Google Scholar] [CrossRef] [PubMed]
- Solovev, A.A.; Mei, Y.; Bermúdez Ureña, E.; Huang, G.; Schmidt, O.G. Catalytic Microtubular Jet Engines Self-Propelled by Accumulated Gas Bubbles. Small 2009, 5, 1688–1692. [Google Scholar] [CrossRef] [PubMed]
- Alapan, Y.; Yasa, O.; Yigit, B.; Ceren Yasa, I.; Erkoc, P.; Sitti, M. Microrobotics and Microorganisms: Biohybrid Autonomous Cellular Robots. Annu. Rev. Control Robot. Auton. Syst. 2019, 2, 205–230. [Google Scholar] [CrossRef]
- Abbott, J.; Nagy, Z.; Beyeler, F.; Nelson, B. Robotics in the Small, Part I: Microbotics. IEEE Robot. Autom. Mag. 2007, 14, 92–103. [Google Scholar] [CrossRef]
- Schuerle, S.; Erni, S.; Flink, M.; Kratochvil, B.E.; Nelson, B.J. Three-Dimensional Magnetic Manipulation of Micro-and Nanostructures for Applications in Life Sciences. IEEE Trans. Magn. 2013, 49, 321–330. [Google Scholar] [CrossRef]
- Nacev, A.; Weinberg, I.N.; Mair, L.O.; Hilaman, R.; Algarin, J.; Jafari, S.; Ijanaten, S.; da Silva, C.; Baker-McKee, J.; Chowdhury, S.; et al. Neurostimulation using mechanical motion of magnetic particles wiggled by external oscillating magnetic gradients. In Proceedings of the 2017 8th International IEEE/EMBS Conference on Neural Engineering (NER), Shanghai, China, 25–28 May 2017; pp. 424–427. [Google Scholar] [CrossRef]
- Jing, W.; Chowdhury, S.; Cappelleri, D. Magnetic mobile microrobots for mechanobiology and automated biomanipulation. In Microbiorobotics; Elsevier: Amsterdam, The Netherlands, 2017; pp. 197–219. [Google Scholar]
- Shen, Y.; Fukuda, T. State of the art: Micro-nanorobotic manipulation in single cell analysis. Robot. Biomim. 2014, 1, 21. [Google Scholar] [CrossRef]
- Steager, E.B.; Selman Sakar, M.; Magee, C.; Kennedy, M.; Cowley, A.; Kumar, V. Automated biomanipulation of single cells using magnetic microrobots. Int. J. Robot. Res. 2013, 32, 346–359. [Google Scholar] [CrossRef]
- Tasoglu, S.; Diller, E.; Guven, S.; Sitti, M.; Demirci, U. Untethered micro-robotic coding of three-dimensional material composition. Nat. Commun. 2014, 5, 3124. [Google Scholar] [CrossRef]
- Singh, A.V.; Sitti, M. Targeted Drug Delivery and Imaging Using Mobile Milli/Microrobots: A Promising Future Towards Theranostic Pharmaceutical Design. Curr. Pharm. Des. 2016, 22, 1418–1428. [Google Scholar] [CrossRef]
- Wei, J.; Porta, M.; Tichem, M.; Staufer, U.; Sarro, P.M. Integrated Piezoresistive Force and Position Detection Sensors for Micro-Handling Applications. J. Microelectromech. Syst. 2013, 22, 1310–1326. [Google Scholar] [CrossRef]
- Pfann, W.G.; Thurston, R.N. Semiconducting Stress Transducers Utilizing the Transverse and Shear Piezoresistance Effects. J. Appl. Phys. 1961, 32, 2008–2019. [Google Scholar] [CrossRef]
- Mei, T.; Ge, Y.; Chen, Y.; Ni, L.; Liao, W.H.; Xu, Y.; Li, W.J. Design and fabrication of an integrated three-dimensional tactile sensor for space robotic applications. In Proceedings of the Twelfth Technical Digest. IEEE International MEMS 99 Conference. IEEE International Conference on Micro Electro Mechanical Systems (Cat. No.99CH36291), Orlando, FL, USA, 21 Janurary 1999; pp. 112–117. [Google Scholar] [CrossRef]
- Noda, K.; Hoshino, K.; Matsumoto, K.; Shimoyama, I. A shear stress sensor for tactile sensing with the piezoresistive cantilever standing in elastic material. Sens. Actuators A Phys. 2006, 127, 295–301. [Google Scholar] [CrossRef]
- Hoover, A.M.; Fearing, R.S. Rapidly Prototyped Orthotweezers for Automated Microassembly. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 812–819. [Google Scholar] [CrossRef]
- Engel, J.; Chen, J.; Liu, C. Development of polyimide flexible tactile sensor skin. J. Micromech. Microeng. 2003, 13, 359–366. [Google Scholar] [CrossRef]
- Beyeler, F.; Muntwyler, S.; Nelson, B. A Six-Axis MEMS Force–Torque Sensor with Micro-Newton and Nano- Newtonmeter Resolution. J. Microelectromech. Syst. 2009, 18, 433–441. [Google Scholar] [CrossRef]
- Shkel, Y.; Ferrier, N. Electrostriction enhancement of solid-state capacitance sensing. IEEE/ASME Trans. Mechatron. 2003, 8, 318–325. [Google Scholar] [CrossRef]
- Ko, C.T.; Tseng, S.H.; Lu, M.S.C. A CMOS Micromachined Capacitive Tactile Sensor with High-Frequency Output. J. Microelectromech. Syst. 2006, 15, 1708–1714. [Google Scholar] [CrossRef]
- Puchner, E.M.; Gaub, H.E. Force and function: Probing proteins with AFM-based force spectroscopy. Curr. Opin. Struct. Biol. 2009, 19, 605–614. [Google Scholar] [CrossRef] [PubMed]
- Jing, W.; Chen, X.; Lyttle, S.; Fu, Z.; Shi, Y.; Cappelleri, D.J. A Magnetic Thin Film Microrobot with Two Operating Modes. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar] [CrossRef]
- Jing, W.; Chen, X.; Lyttle, S.; Shi, Y.; Cappelleri, D.J. Design of a Micro-Scale Magnetorestrictive Asymmetric Thin Film Bimorph (μMAB) Microrobot. In ASME International Mechanical Engineering Congress and Exposition; ASME: Vancouver, BC, Canada, 2012; pp. 599–607. [Google Scholar]
- Jing, W.; Pagano, N.; Cappelleri, D.J. A Micro-Scale Magnetic Tumbling Microrobot. In Proceedings of the ASME International Design Engineering Technical Conferences (IDETC), Chicago, IL, USA, 12–15 August 2012. [Google Scholar]
- Jing, W.; Pagano, N.; Cappelleri, D. A Novel Micro-Scale Magnetic Tumbling Microrobot. J. Micro-Bio Robot. 2013, 8, 1–12. [Google Scholar] [CrossRef]
- Bi, C.; Guix, M.; Johnson, B.; Jing, W.; Cappelleri, D.; Bi, C.; Guix, M.; Johnson, B.V.; Jing, W.; Cappelleri, D.J. Design of Microscale Magnetic Tumbling Robots for Locomotion in Multiple Environments and Complex Terrains. Micromachines 2018, 9, 68. [Google Scholar] [CrossRef]
- Floyd, S.; Pawashe, C.; Sitti, M. An untethered magnetically actuated micro-robot capable of motion on arbitrary surfaces. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 419–424. [Google Scholar] [CrossRef]
- Huang, H.W.; Sakar, M.S.; Petruska, A.J.; Pané, S.; Nelson, B.J. Soft micromachines with programmable motility and morphology. Nat. Commun. 2016, 7, 12263. [Google Scholar] [CrossRef]
- Bi, C.; Niedert, E.E.; Adam, G.; Lambert, E.; Solorio, L.; Goergen, C.J.; Cappelleri, D.J. Tumbling Magnetic Microrobots for Biomedical Applications. In Proceedings of the International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Helsinki, Finland, 1–5 July 2019. [Google Scholar]
- Freeling, J.L.; Rezvani, K. Assessment of murine colorectal cancer by micro-ultrasound using three dimensional reconstruction and non-linear contrast imaging. Mol. Ther. Methods Clin. Dev. 2016, 5, 16070. [Google Scholar] [CrossRef]
- Jing, W.; Cappelleri, D. A Magnetic Microrobot with In-Situ Force Sensing Capabilities. Robotics 2014, 3, 106–119. [Google Scholar] [CrossRef]
- Jing, W.; Cappelleri, D. Micro-Force Sensing Mobile Microrobots. In Proceedings of the SPIE, Baltimore, MD, USA, 22 April 2015. [Google Scholar]
- Guix, M.; Wang, J.; An, Z.; Adam, G.; Cappelleri, D.J. Real-Time Force-Feedback Micromanipulation Using Mobile Microrobots With Colored Fiducials. IEEE Robot. Autom. Lett. 2018, 3, 3591–3597. [Google Scholar] [CrossRef]
- Jing, W.; Chowdhury, S.; Guix, M.; Wang, J.; An, Z.; Johnson, B.V.; Cappelleri, D.J. A Microforce-Sensing Mobile Microrobot for Automated Micromanipulation Tasks. IEEE Trans. Autom. Sci. Eng. 2018, 1–13. [Google Scholar] [CrossRef]
- Hersen, P.; Ladoux, B. Push it, pull it. Nature 2011, 470, 340–341. [Google Scholar] [CrossRef]
- Yue, X.; Nguyen, T.D.; Zellmer, V.; Zhang, S.; Zorlutuna, P. Stromal cell-laden 3D hydrogel microwell arrays as tumor microenvironment model for studying stiffness dependent stromal cell-cancer interactions. Biomaterials 2018, 170, 37–48. [Google Scholar] [CrossRef]
- Pawashe, C.; Diller, E.; Floyd, S.; Sitti, M. Assembly and disassembly of magnetic mobile micro-robots towards deterministic 2-D reconfigurable micro-systems. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 261–266. [Google Scholar] [CrossRef]
- Diller, E.; Floyd, S.; Pawashe, C.; Sitti, M. Control of Multiple Heterogeneous Magnetic Microrobots in Two Dimensions on Nonspecialized Surfaces. IEEE Trans. Robot. 2012, 28, 172–182. [Google Scholar] [CrossRef]
- DeVon, D.; Bretl, T. Control of many robots moving in the same direction with different speeds: A decoupling approach. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 1794–1799. [Google Scholar] [CrossRef]
- Wong, D.; Wang, J.; Steager, E.; Kumar, V. Control of Multiple Magnetic Micro Robots. In Proceedings of the Volume 4: 20th Design for Manufacturing and the Life Cycle Conference; 9th International Conference on Micro-and Nanosystems, Boston, MA, USA, 2–5 August 2015; p. V004T09A041. [Google Scholar] [CrossRef]
- Yu, K.; Yi, J.; Shan, J. Motion Control, Planning and Manipulation of Nanowires Under Electric-Fields in Fluid Suspension. IEEE Trans. Autom. Sci. Eng. 2015, 12, 37–49. [Google Scholar] [CrossRef]
- Yu, K.; Yi, J.; Shan, J. Simultaneous Multiple-Nanowire Motion Control, Planning, and Manipulation Under Electric Fields in Fluid Suspension. IEEE Trans. Autom. Sci. Eng. 2018, 15, 80–91. [Google Scholar] [CrossRef]
- Yu, K.; Yi, J.; Shan, J.W. Real-time motion planning of multiple nanowires in fluid suspension under electric-field actuation. Int. J. Intell. Robot. Appl. 2018, 2, 383–399. [Google Scholar] [CrossRef]
- Probst, R.; Cummins, Z.; Ropp, C.; Waks, E.; Shapiro, B. Flow Control of Small Objects on Chip: Manipulating Live Cells, Quantum Dots, and Nanowires. IEEE Control Syst. 2012, 32, 26–53. [Google Scholar] [CrossRef]
- Chaudhary, S.; Shapiro, B. Arbitrary steering of multiple particles independently in an electro-osmotically driven microfluidic system. IEEE Trans. Control Syst. Technol. 2006, 14, 669–680. [Google Scholar] [CrossRef]
- Chowdhury, S.; Jing, W.; Cappelleri, D.J. Towards Independent Control of Multiple Magnetic Mobile Microrobots. Micromachines 2016, 7, 3. [Google Scholar] [CrossRef]
- Kantaros, Y.; Johnson, B.V.; Chowdhury, S.; Cappelleri, D.J.; Zavlanos, M.M. Control of Magnetic Microrobot Teams for Temporal Micromanipulation Tasks. IEEE Trans. Robot. 2018, 34, 1472–1489. [Google Scholar] [CrossRef]
- Chowdhury, S.; Johnson, B.V.; Jing, W.; Cappelleri, D.J. Designing local magnetic fields and path planning for independent actuation of multiple mobile microrobots. J. Micro-Bio Robot. 2017, 12, 21–31. [Google Scholar] [CrossRef]
- Johnson, B.V.; Cappelleri, D.J. Microrobot Design for Micromanipulation with Orientation Control Using Local Magnetic Fields. In Proceedings of the International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Helsinki, Finland, 1–5 July 2019. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Microcoil Platform | |||
|---|---|---|---|
| mm scale | m scale v1 | m scale v2 | |
| Workspace |  |  |  |
| References | [70,71] | [72] | [73] |
| Coil type | Spiral (5 Turns) | Straight wire | Straight wire |
| Number of coil layers | 1 | 1 | 2 |
| Number of coils | in each coil layer) | ||
| Coil dimensions | |||
| Coil spacing | |||
| Workspace dimensions | |||
| Robot footprint | ≥ | ≥ | ≥ |
| Movement type | Discrete | Continuous | Continuous |
| Direction Control | Center and Diagonal | Y Only | Any in XY Plane |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Adam, G.; Chowdhury, S.; Guix, M.; Johnson, B.V.; Bi, C.; Cappelleri, D. Towards Functional Mobile Microrobotic Systems. Robotics 2019, 8, 69. https://doi.org/10.3390/robotics8030069
Adam G, Chowdhury S, Guix M, Johnson BV, Bi C, Cappelleri D. Towards Functional Mobile Microrobotic Systems. Robotics. 2019; 8(3):69. https://doi.org/10.3390/robotics8030069
Chicago/Turabian StyleAdam, Georges, Sagar Chowdhury, Maria Guix, Benjamin V. Johnson, Chenghao Bi, and David Cappelleri. 2019. "Towards Functional Mobile Microrobotic Systems" Robotics 8, no. 3: 69. https://doi.org/10.3390/robotics8030069
APA StyleAdam, G., Chowdhury, S., Guix, M., Johnson, B. V., Bi, C., & Cappelleri, D. (2019). Towards Functional Mobile Microrobotic Systems. Robotics, 8(3), 69. https://doi.org/10.3390/robotics8030069