Wearable Sensors for Human–Robot Walking Together

 ,
,  ,
, 
Abstract
1. Introduction
1.1. Social Robots and Human–Robot Interaction
1.2. Increase HRI: Sensors in Social Robotics
2. Materials and Methods
2.1. SensFoot
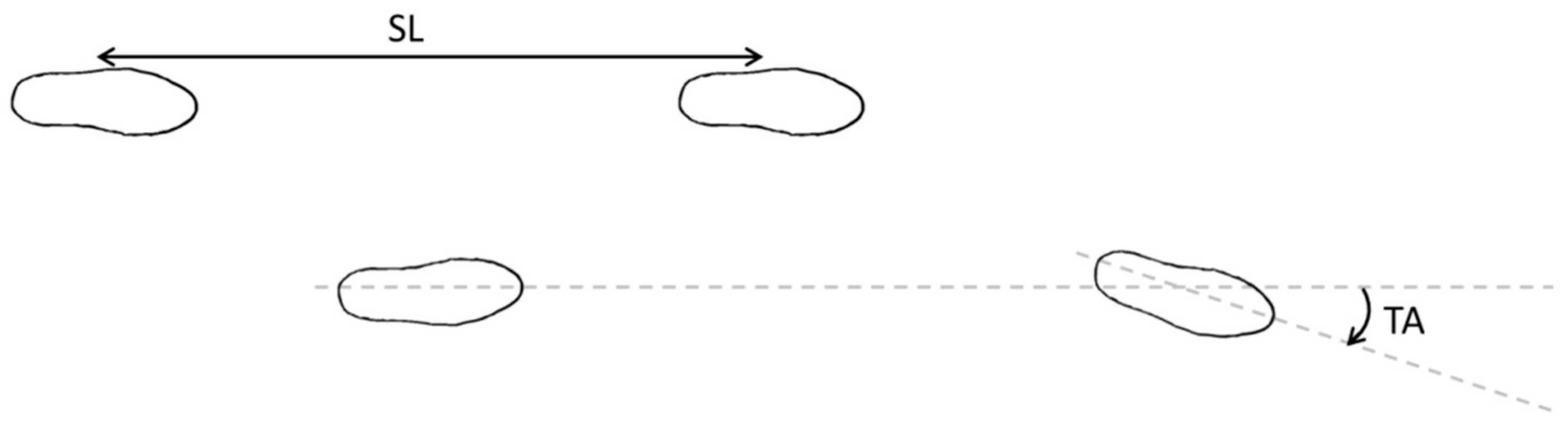
2.2. Gait Parameters Extraction
- Stride Length (SL): the distance between the reference point on one foot and the same point at two successive foot-flat positions (see Figure 2);
- Stride Time (ST): while walking, is the time between successive contacts of the same foot with the floor, i.e., the time for walking across the SL.
- Walking Speed (WS), it is calculated as the Stride Length divided by the Stride Time (SL/ST) [26];
- Foot Clearance (FC): is the maximum foot height during the swing phase;
- Turning Angle (TA): the change in azimuth between the beginning and end of the gait cycle (see Figure 2).
- Segmentation of the gait cycle into different phases;
- Evaluation of the initial orientation of the sensor;
- Update of the orientation at each time frame;
- Evaluation of a gravity-free component of acceleration in the fixed frame;
- De-drifted single and double integration of gravity-free acceleration to obtain speed and displacement.
2.3. Experiment I: Validation the Inertial Sensing Unit
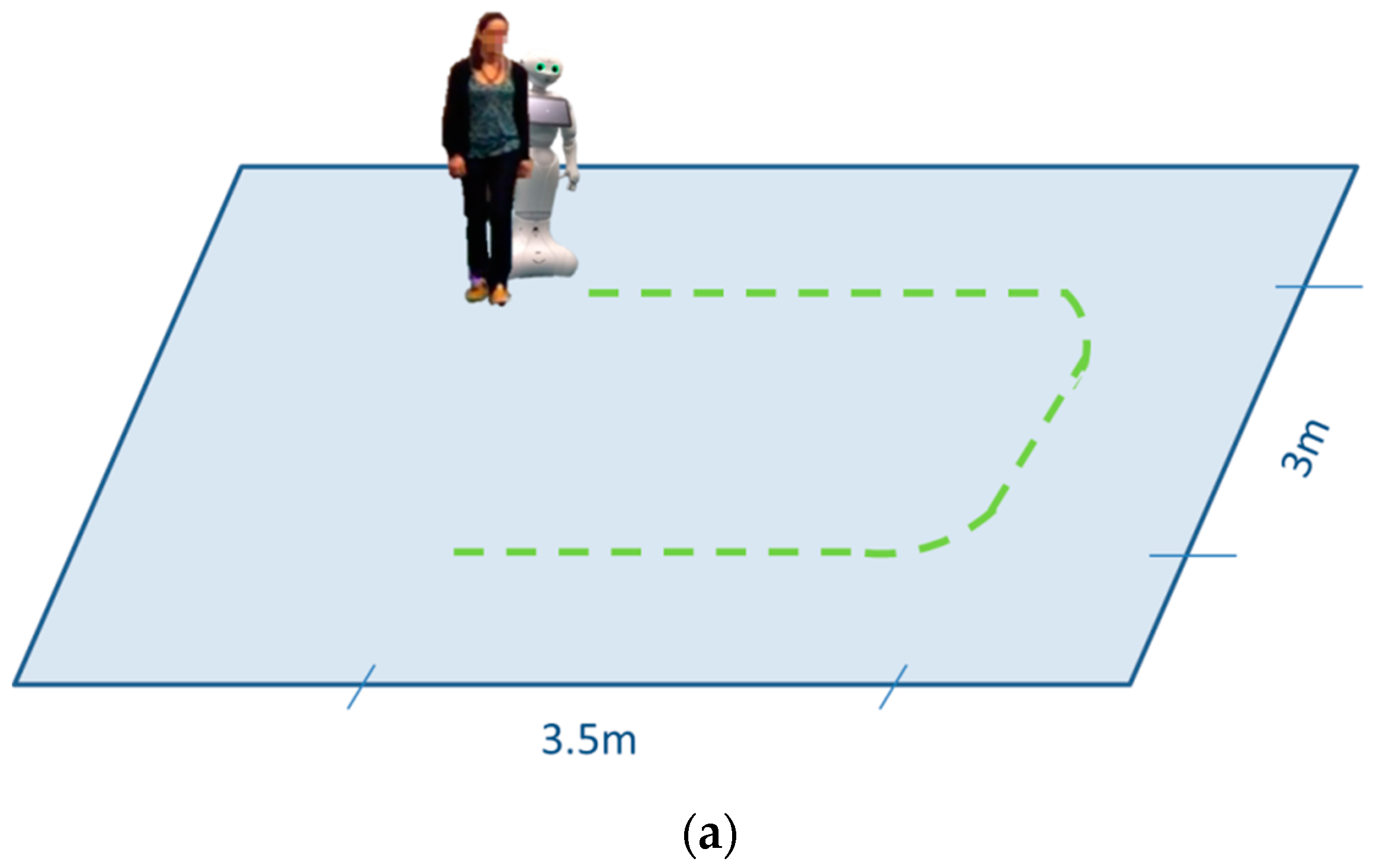
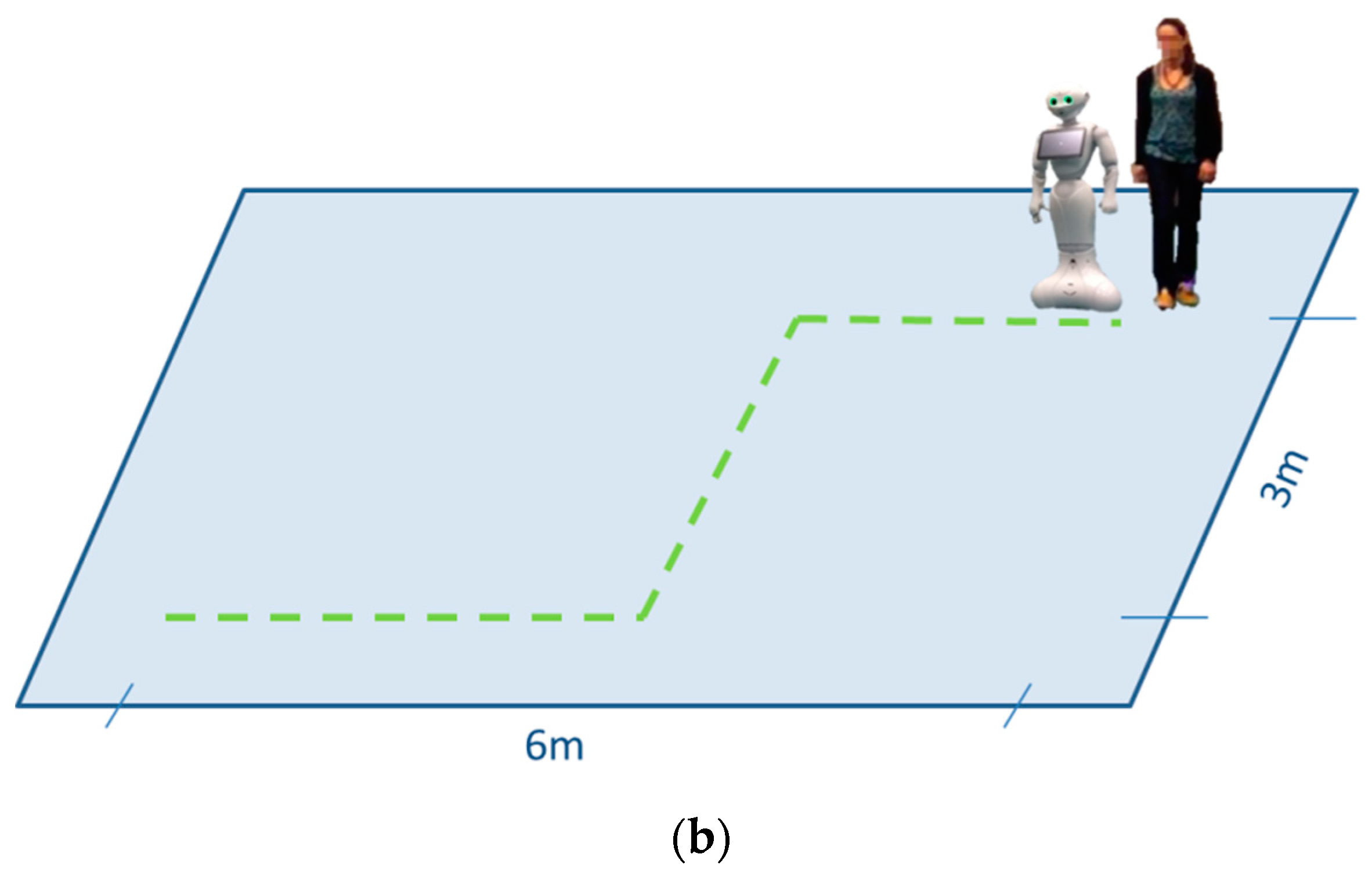
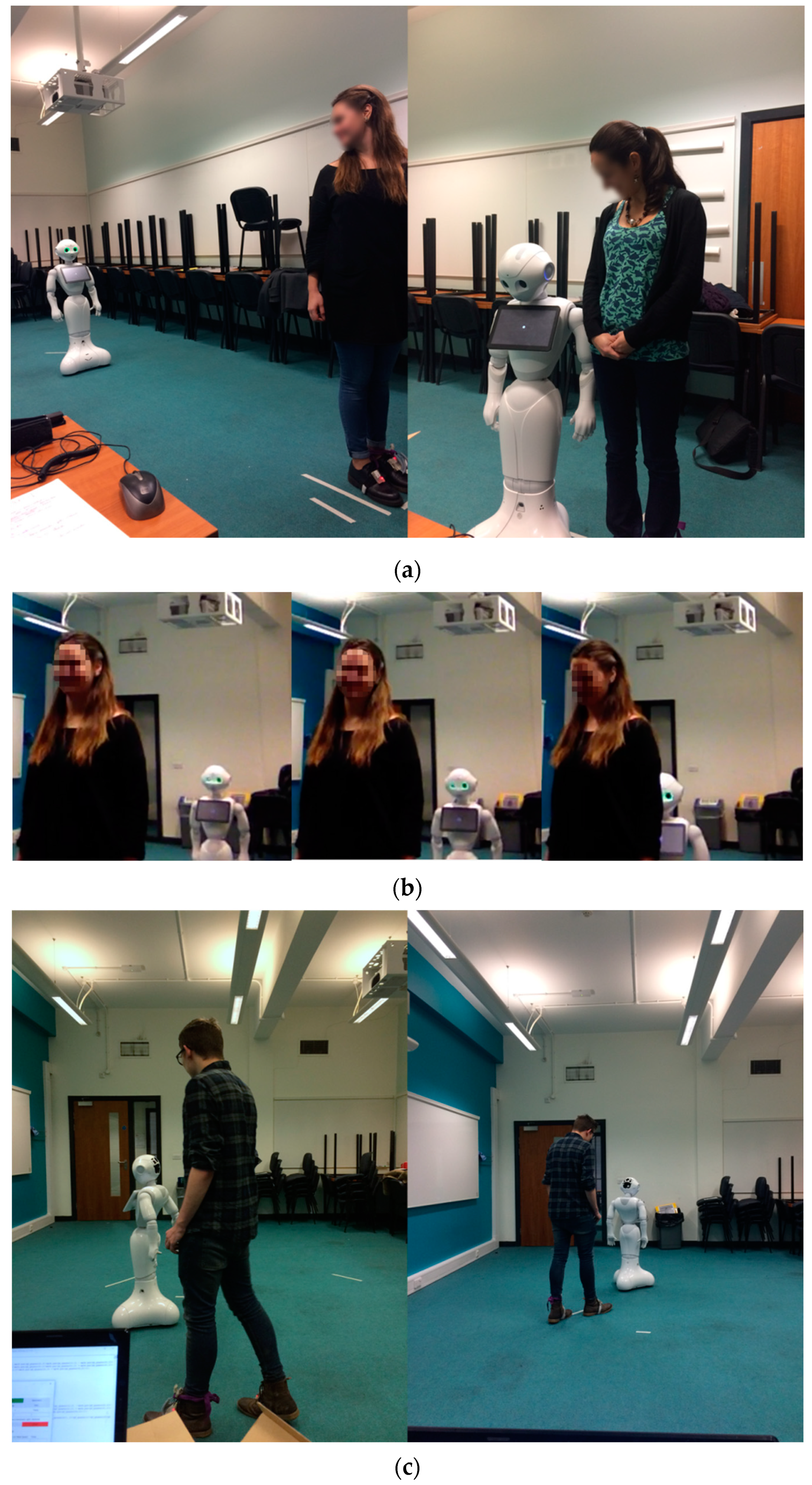
2.4. Experiment II: Testing the HRI through SensFoots in Use-Case Scenarios
2.4.1. Pepper Robot
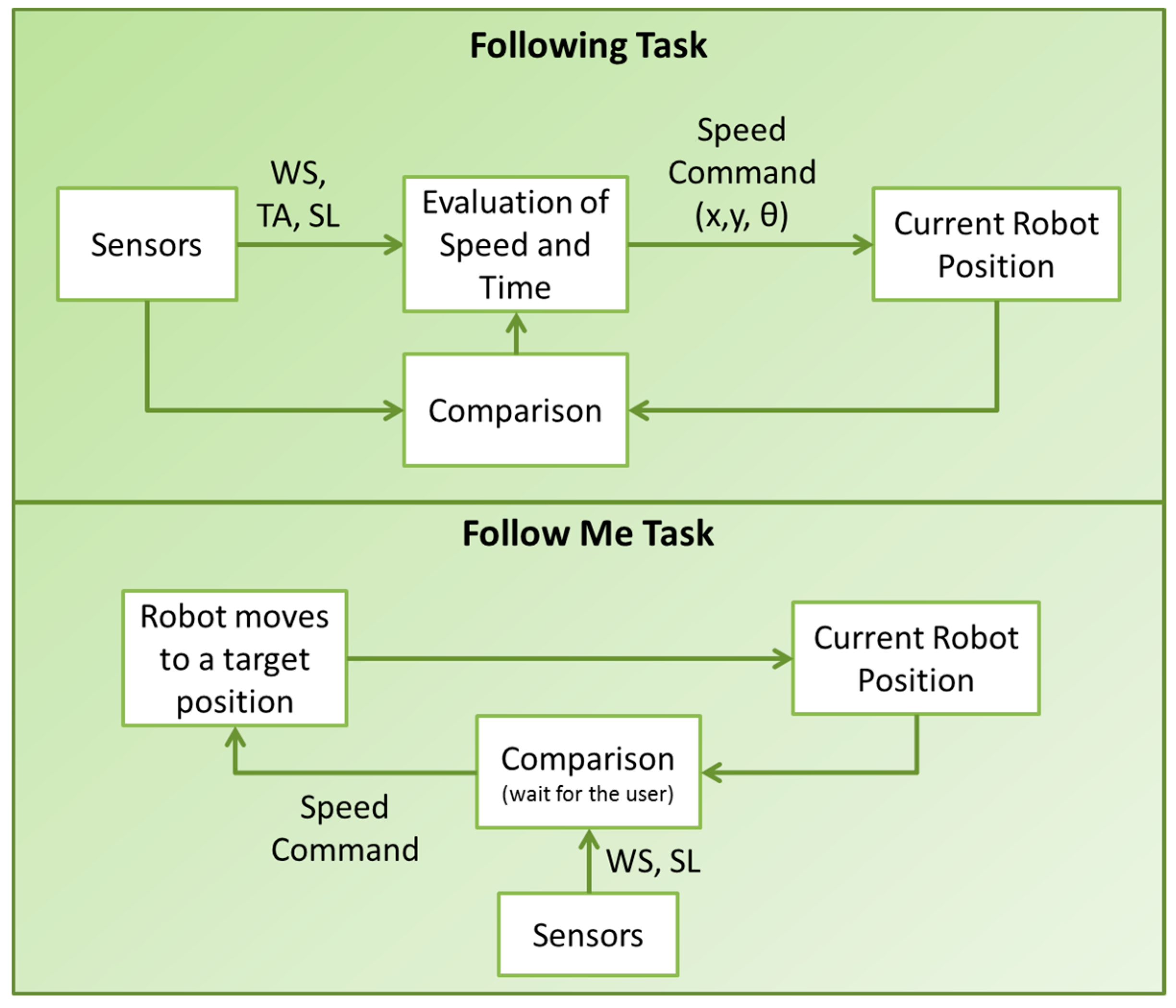
2.4.2. HRI Experimental Protocol
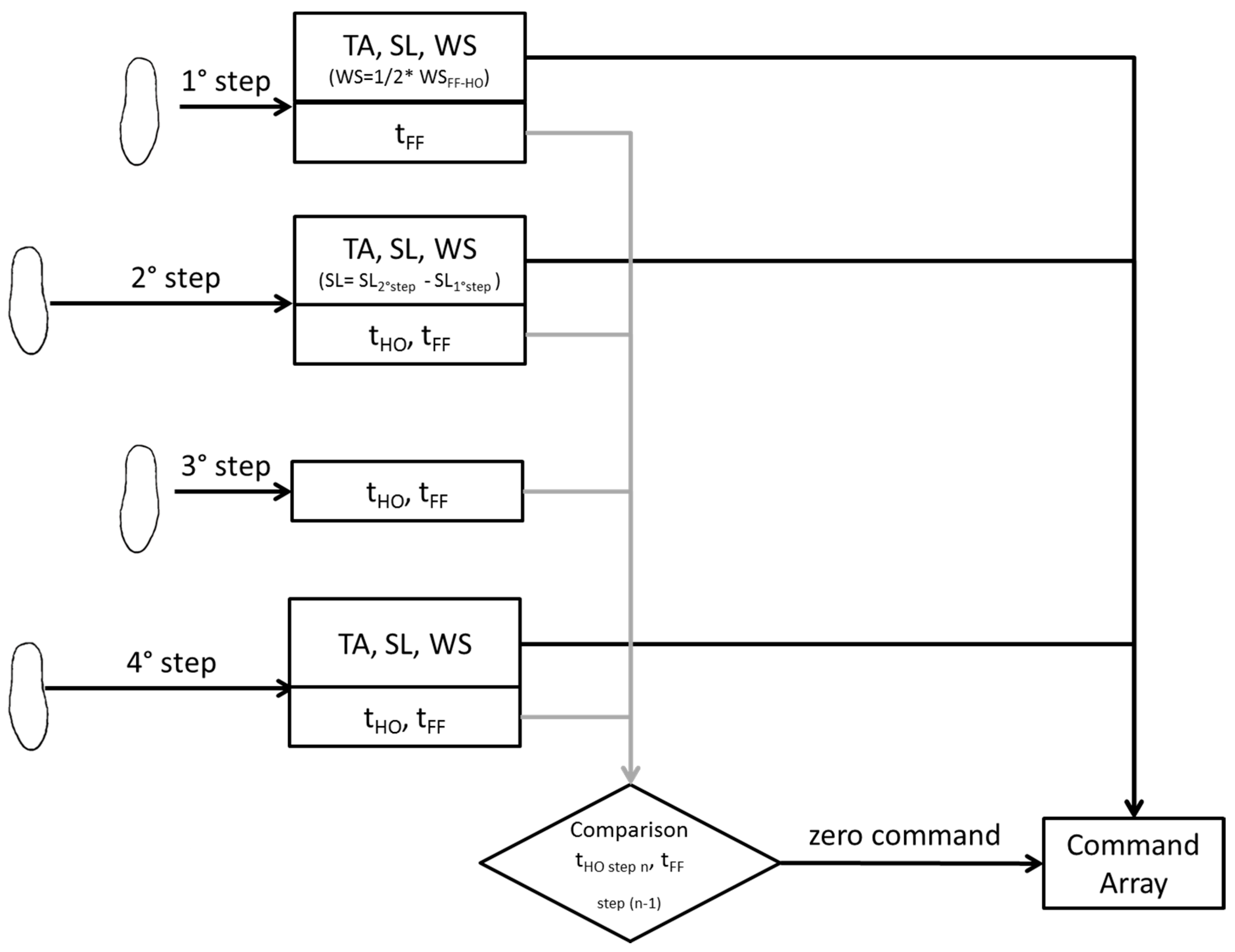
2.4.3. Robot Control and Data Processing for Human–Robot Walking
- Data collection from the SensFoots;
- Real-time extraction of gait parameters;
- Control of robot navigation.
3. Experimental Results
3.1. Experiment I: Validation of the Inertial Sensing Unit
3.2. Experiment II: Testing the HRI through SensFoots in Use-Case Scenarios
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
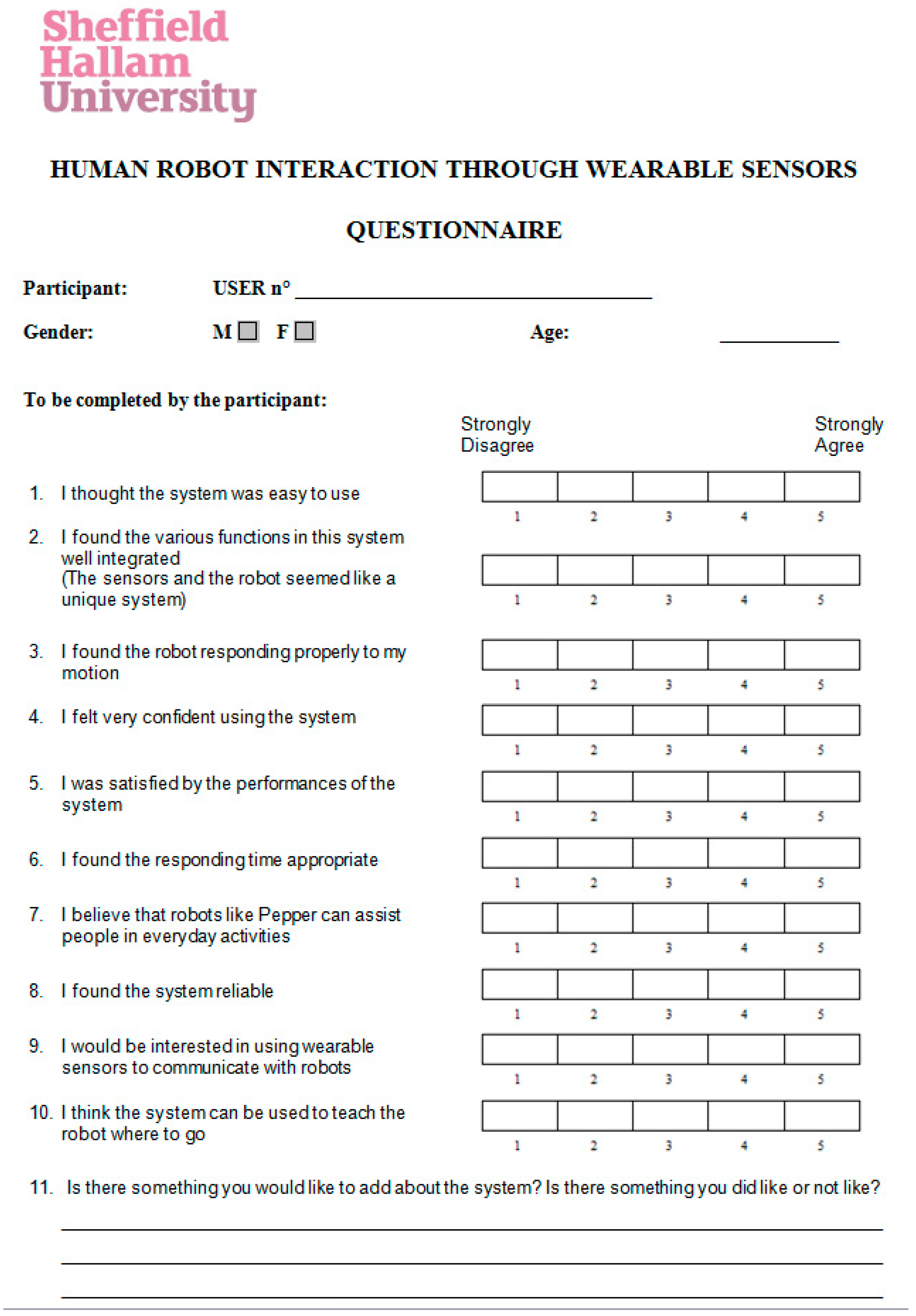
Appendix A- User Questionnaire

References
- Di Nuovo, A.; Broz, F.; Cavallo, F.; Dario, P. New Frontiers of Service Robotics for Active and Healthy Ageing. Int. J. Soc. Robot. 2016, 8, 353–354. [Google Scholar] [CrossRef]
- Matarić, M.J.; Scassellati, B. Socially Assistive Robotics. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer International Publishing: New York, NY, USA, 2016; pp. 1973–1994. ISBN 978-3-319-32552-1. [Google Scholar]
- Cavallo, F.; Aquilano, M.; Bonaccorsi, M.; Mannari, I.; Carrozza, M.C.; Dario, P. Multidisciplinary approach for developing a new robotic system for domiciliary assistance to elderly people. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 5327–5330. [Google Scholar]
- Conti, D.; Cirasa, C.; Di Nuovo, S.; Di Nuovo, A. “Robot, tell me a tale!”: A Social Robot as tool for Teachers in Kindergarten. Interact. Stud. 2019, 20, 1–16. [Google Scholar]
- Donner, M.; Himstedt, M.; Hellbach, S.; Boehme, H.-J. Awakening history: Preparing a museum tour guide robot for augmenting exhibits. In Proceedings of the 2013 European Conference on Mobile Robots (ECMR), Barcelona, Spain, 25–27 September 2013; pp. 337–342. [Google Scholar]
- Kanda, T.; Shiomi, M.; Miyashita, Z.; Ishiguro, H.; Hagita, N. An affective guide robot in a shopping mall. In Proceedings of the 2009 4th ACM/IEEE International Conference on Human–robot Interaction (HRI), La Jolla, CA, USA, 9–13 March 2009; pp. 173–180. [Google Scholar]
- Cavallo, F.; Limosani, R.; Manzi, A.; Bonaccorsi, M.; Esposito, R.; Di Rocco, M.; Pecora, F.; Teti, G.; Saffiotti, A.; Dario, P. Development of a Socially Believable Multi-Robot Solution from Town to Home. Cognit. Comput. 2014, 6, 954–967. [Google Scholar] [CrossRef]
- Manzi, A.; Fiorini, L.; Esposito, R.; Bonaccorsi, M.; Mannari, I.; Dario, P.; Cavallo, F. Design of a cloud robotic system to support senior citizens: the KuBo experience. Auton. Robots 2016, 1–11. [Google Scholar] [CrossRef]
- Hu, J.; Edsinger, A.; Lim, Y.-J.; Donaldson, N.; Solano, M.; Solochek, A.; Marchessault, R. An advanced medical robotic system augmenting healthcare capabilities-robotic nursing assistant. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 6264–6269. [Google Scholar]
- Penders, J.; Alboul, L.; Witkowski, U.; Naghsh, A.; Saez-Pons, J.; Herbrechtsmeier, S.; El-Habbal, M. A robot swarm assisting a human fire-fighter. Adv. Robot. 2011, 25, 93–117. [Google Scholar] [CrossRef]
- Penders, J.; Ghosh, A. Human robot interaction in the absence of visual and aural feedback: Exploring the haptic sense. Procedia Comput. Sci. 2015, 71, 185–195. [Google Scholar] [CrossRef][Green Version]
- Turchetti, G.; Micera, S.; Cavallo, F.; Odetti, L.; Dario, P. Technology and innovative services. IEEE Pulse 2011, 2, 27–35. [Google Scholar] [CrossRef]
- Cai, H.; Lin, Y. Coordinating Cognitive Assistance with CognitiveEngagement Control Approaches inHuman–Machine Collaboration. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2012, 42, 286–294. [Google Scholar] [CrossRef]
- Di Nuovo, A.; Broz, F.; Wang, N.; Belpaeme, T.; Cangelosi, A.; Jones, R.; Esposito, R.; Cavallo, F.; Dario, P. The multi-modal interface of Robot-Era multi-robot services tailored for the elderly. Intell. Serv. Robot. 2018, 11, 109–126. [Google Scholar] [CrossRef]
- Cavallo, F.; Esposito, R.; Limosani, R.; Manzi, A.; Bevilacqua, R.; Felici, E.; Di Nuovo, A.; Cangelosi, A.; Lattanzio, F.; Dario, P. Robotic Services Acceptance in Smart Environments With Older Adults: User Satisfaction and Acceptability Study. J. Med. Internet Res. 2018, 20, 264. [Google Scholar] [CrossRef]
- Yan, H.; Ang, M.H., Jr.; Poo, A.N. A survey on perception methods for human--robot interaction in social robots. Int. J. Soc. Robot. 2014, 6, 85–119. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhang, Z.; Beck, A.; Yuan, J.; Thalmann, D. Human--robot interaction by understanding upper body gestures. Presence Teleop. Virt. Environ. 2014, 23, 133–154. [Google Scholar] [CrossRef]
- Cubo, J.; Nieto, A.; Pimentel, E. A cloud-based Internet of Things platform for ambient assisted living. Sensors 2014, 14, 14070–14105. [Google Scholar] [CrossRef] [PubMed]
- Ray, P.P. Internet of Robotic Things: Concept, Technologies, and Challenges. IEEE Access 2016, 4, 9489–9500. [Google Scholar] [CrossRef]
- Ghosh, A.; Penders, J.; Jones, P.E.; Reed, H. Experience of using a haptic interface to follow a robot without visual feedback. In Proceedings of the 23rd IEEE International Symposium on Robot and Human Interactive Communication (2014 RO-MAN), Edinburgh, Scotland, 25–29 August 2014; pp. 329–334. [Google Scholar]
- Cifuentes, C.A.; Frizera, A.; Carelli, R.; Bastos, T. Human--robot interaction based on wearable IMU sensor and laser range finder. Rob. Auton. Syst. 2014, 62, 1425–1439. [Google Scholar] [CrossRef]
- Papageorgiou, X.S.; Chalvatzaki, G.; Tzafestas, C.S.; Maragos, P. Hidden markov modeling of human normal gait using laser range finder for a mobility assistance robot. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 482–487. [Google Scholar]
- Alvarez-Santos, V.; Pardo, X.M.; Iglesias, R.; Canedo-Rodriguez, A.; Regueiro, C.V. Feature analysis for human recognition and discrimination: Application to a person-following behaviour in a mobile robot. Rob Auton Syst. 2012, 60, 1021–1036. [Google Scholar] [CrossRef]
- Wu, L.; An, Z.; Xu, Y.; Cui, L. Human tracking based on LRF and wearable IMU data fusion. In Proceedings of the 12th International Conference on Information Processing in Sensor Networks, Philadelphia, PA, USA, 8–11 April 2013; pp. 349–350. [Google Scholar]
- Vaughan, C.L.; Davis, B.L.; O’connor, J.C. Dynamics of Human Gait; Human Kinetics Publishers: Champaign, IL, USA, 1992; Volume 2. [Google Scholar]
- Sabatini, A.M.; Martelloni, C.; Scapellato, S.; Cavallo, F. Assessment of walking features from foot inertial sensing. IEEE Trans. Biomed. Eng. 2005, 52, 486–494. [Google Scholar] [CrossRef]
- Yang, S.; Li, Q. Inertial sensor-based methods in walking speed estimation: A systematic review. Sensors 2012, 12, 6102–6116. [Google Scholar] [CrossRef] [PubMed]
- Mariani, B.; Hoskovec, C.; Rochat, S.; Büla, C.; Penders, J.; Aminian, K. 3D gait assessment in young and elderly subjects using foot-worn inertial sensors. J. Biomech. 2010, 43, 2999–3006. [Google Scholar] [CrossRef] [PubMed]
- Alvarez, J.C.; González, R.C.; Alvarez, D.; López, A.M.; Rodriguez-Uria, J. Multisensor approach to walking distance estimation with foot inertial sensing. In Proceedings of the 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, (EMBS 2007), Lyon, France, 23–26 August 2007; pp. 5719–5722. [Google Scholar]
- Rampp, A.; Barth, J.; Schülein, S.; Gaßmann, K.-G.; Klucken, J.; Eskofier, B.M. Inertial sensor-based stride parameter calculation from gait sequences in geriatric patients. IEEE Trans. Biomed. Eng. 2015, 62, 1089–1097. [Google Scholar] [CrossRef]
- Dadashi, F.; Mariani, B.; Rochat, S.; Büla, C.J.; Santos-Eggimann, B.; Aminian, K. Gait and foot clearance parameters obtained using shoe-worn inertial sensors in a large-population sample of older adults. Sensors 2013, 14, 443–457. [Google Scholar] [CrossRef] [PubMed]
- Sagawa, K.; Inooka, H.; Satoh, Y. Non-restricted measurement of walking distance. In Proceedings of the 2000 IEEE International Conference on Systems, Man, and Cybernetics, Nashville, TN, USA, 8–11 October 2000; Volume 3, pp. 1847–1852. [Google Scholar]
- Rovini, E.; Maremmani, C.; Moschetti, A.; Esposito, D.; Cavallo, F. Comparative Motor Pre-clinical Assessment in Parkinson’s Disease Using Supervised Machine Learning Approaches. Ann. Biomed. Eng. 2018, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Favre, J.; Jolles, B.M.; Siegrist, O.; Aminian, K. Quaternion-based fusion of gyroscopes and accelerometers to improve 3D angle measurement. Electron. Lett. 2006, 42, 612–614. [Google Scholar] [CrossRef]
- Pandey, A.K.; Gelin, R. A Mass-Produced Sociable Humanoid Robot: Pepper: The First Machine of Its Kind. IEEE Robot. Autom. Mag. 2018, 25, 40–48. [Google Scholar] [CrossRef]
- Pepper Description. Available online: https://www.softbankrobotics.com/emea/en/robots/pepper/find-out-more-about-pepper (accessed on 26 July 2018).
- Pepper Locomotion. Available online: http://doc.aldebaran.com/2-1/naoqi/motion/control-walk.html (accessed on 26 July 2018).
- Van Rossum, G.; Drake, F.L., Jr. Python Reference Manual; Centrum voor Wiskunde en Informatica: Amsterdam, The Netherlands, 1995. [Google Scholar]
- Conti, D.; Di Nuovo, S.; Buono, S.; Di Nuovo, A. Robots in education and care of children with developmental disabilities: a study on acceptance by experienced and future professionals. Int. J. Soc. Robot. 2017, 9, 51–62. [Google Scholar] [CrossRef]
- Kline, P. Handbook of Psychological Testing; Routledge: London, UK, 2013. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean Absolute Error | Mean Absolute Error Standard Deviation | R | |
|---|---|---|---|
| Stride Length (m) | 0.054 | ±0.045 | 0.931 |
| Walking Speed (m/s) | 0.067 | ±0.058 | 0.925 |
| Turning Angle >0.314 (rad) | 0.090 | ±0.065 | 0.997 |
| Item | Mean | Standard Deviation | Min | Max | Mode |
|---|---|---|---|---|---|
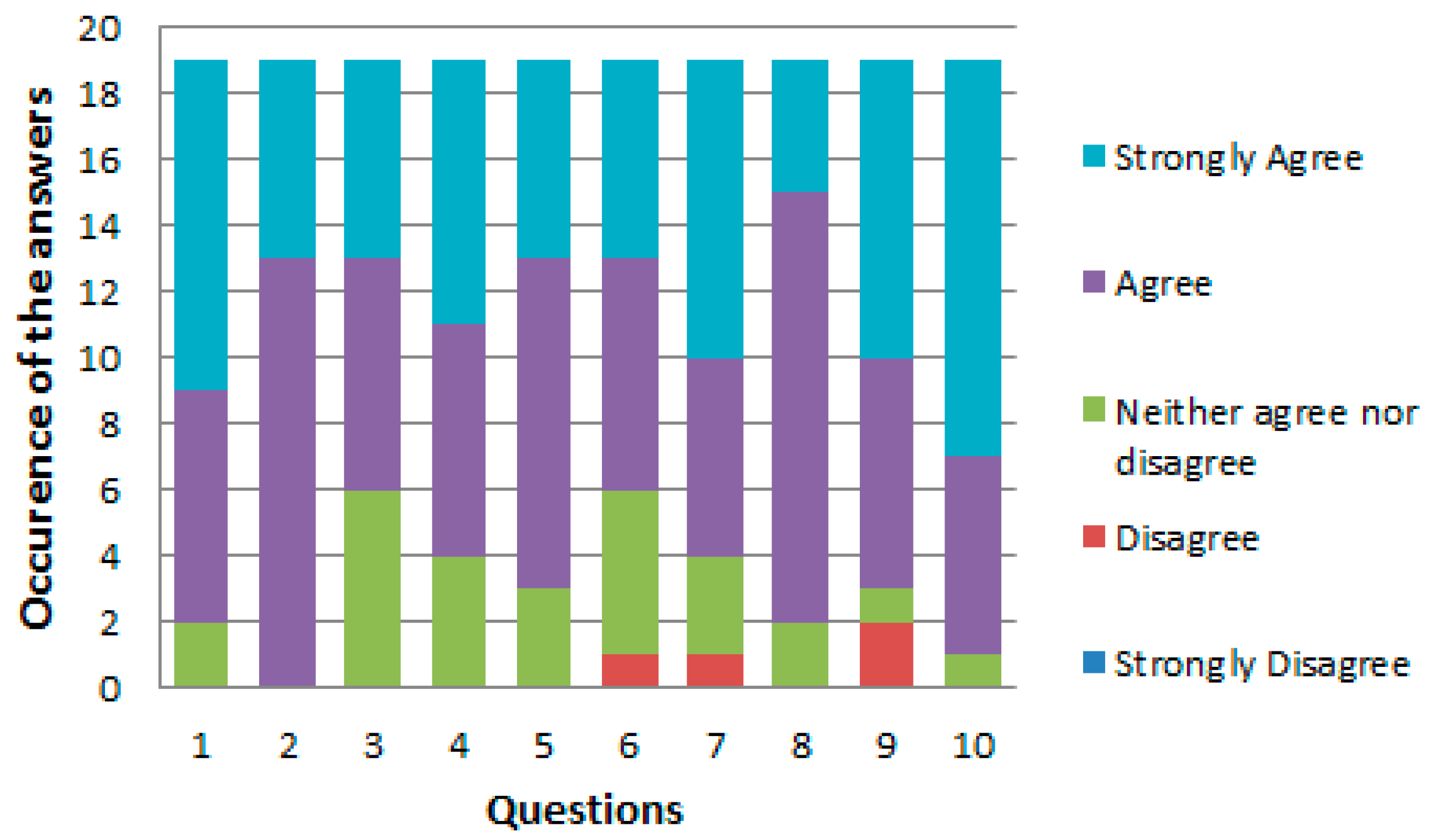
| 1. I thought the system was easy to use. | 4.42 | ±0.69 | 3 | 5 | 5 |
| 2. I found the various functions in this system well integrated. | 4.32 | ±0.48 | 4 | 5 | 4 |
| 3. I found the robot responding properly to my motion. | 4.00 | ±0.82 | 3 | 5 | 4 |
| 4. I felt very confident using the system. | 4.21 | ±0.79 | 3 | 5 | 5 |
| 5. I was satisfied with the performances of the system. | 4.16 | ±0.69 | 3 | 5 | 4 |
| 6. I found the responding time appropriate. | 3.95 | ±0.91 | 2 | 5 | 4 |
| 7. I believe that robots like Pepper can assist people in everyday activities. | 4.21 | ±0.92 | 2 | 5 | 5 |
| 8. I found the system reliable. | 4.11 | ±0.57 | 3 | 5 | 4 |
| 9. I would be interested in using wearable sensors to communicate with robots | 4.21 | ±0.98 | 2 | 5 | 5 |
| 10. I think the system can be used to teach the robot where to go. | 4.40 | ±0.61 | 3 | 5 | 5 |
| Independent Variable | Dependent Variable | R2 | Beta |
|---|---|---|---|
| q1 | q5 | 0.746 | 0.505 |
| q3 | 0.382 | ||
| q4 | 0.167 | ||
| q6 | 0.273 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moschetti, A.; Cavallo, F.; Esposito, D.; Penders, J.; Di Nuovo, A. Wearable Sensors for Human–Robot Walking Together. Robotics 2019, 8, 38. https://doi.org/10.3390/robotics8020038
Moschetti A, Cavallo F, Esposito D, Penders J, Di Nuovo A. Wearable Sensors for Human–Robot Walking Together. Robotics. 2019; 8(2):38. https://doi.org/10.3390/robotics8020038
Chicago/Turabian StyleMoschetti, Alessandra, Filippo Cavallo, Dario Esposito, Jacques Penders, and Alessandro Di Nuovo. 2019. "Wearable Sensors for Human–Robot Walking Together" Robotics 8, no. 2: 38. https://doi.org/10.3390/robotics8020038
APA StyleMoschetti, A., Cavallo, F., Esposito, D., Penders, J., & Di Nuovo, A. (2019). Wearable Sensors for Human–Robot Walking Together. Robotics, 8(2), 38. https://doi.org/10.3390/robotics8020038