HexaMob—A Hybrid Modular Robotic Design for Implementing Biomimetic Structures


Abstract
:1. Introduction
2. Related Work
2.1. M3 & M3Express Modular Robot
2.2. iMobot
2.3. SMORES
2.4. Trimobot
2.5. CoSMO
3. HexaMob—Design
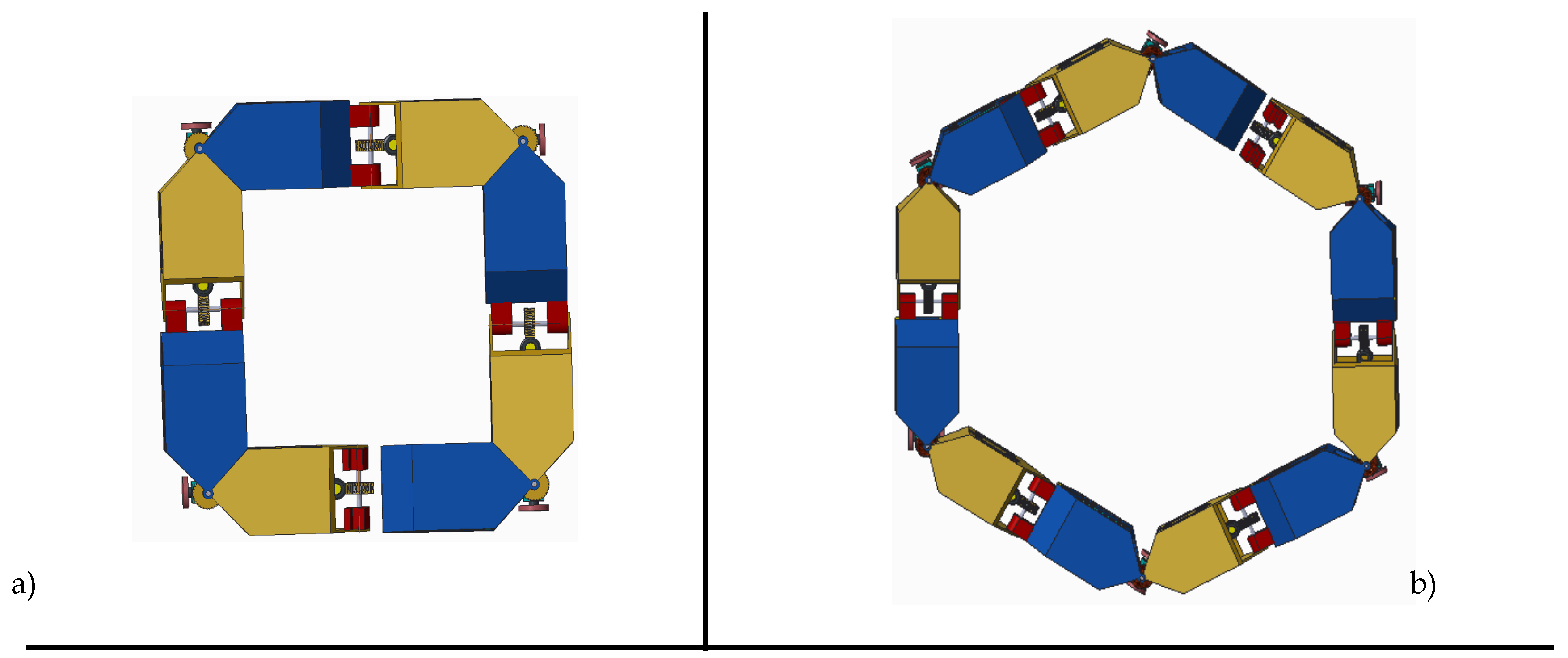
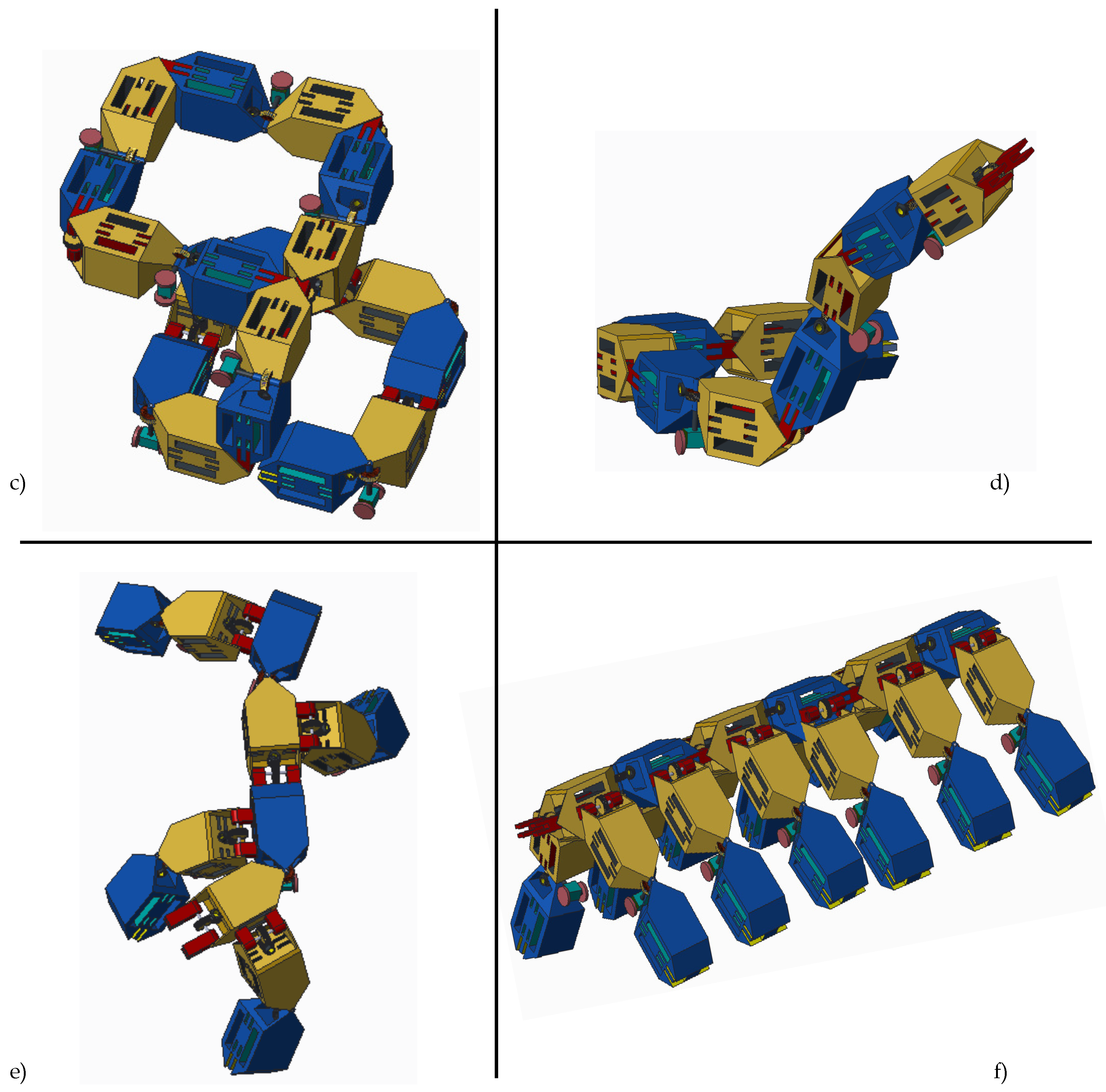
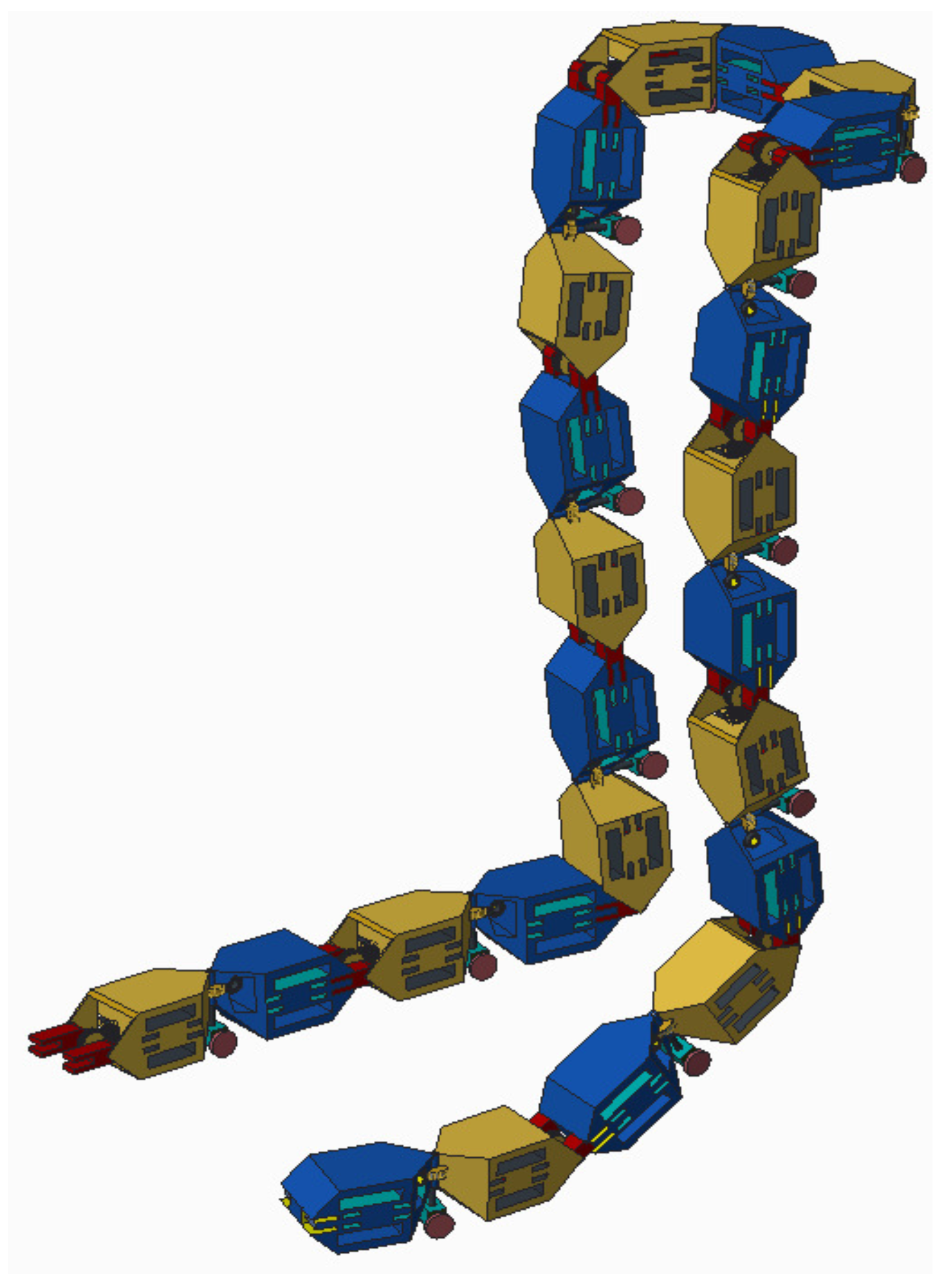
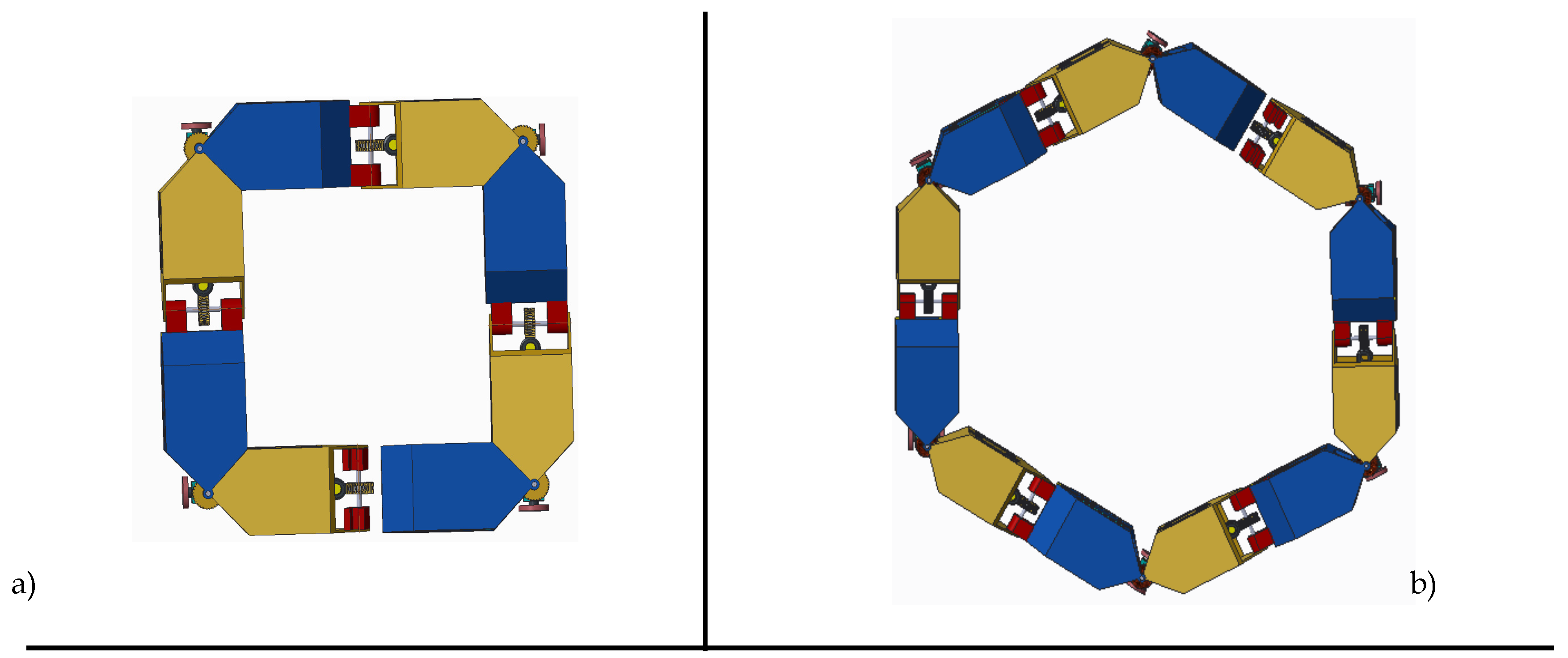
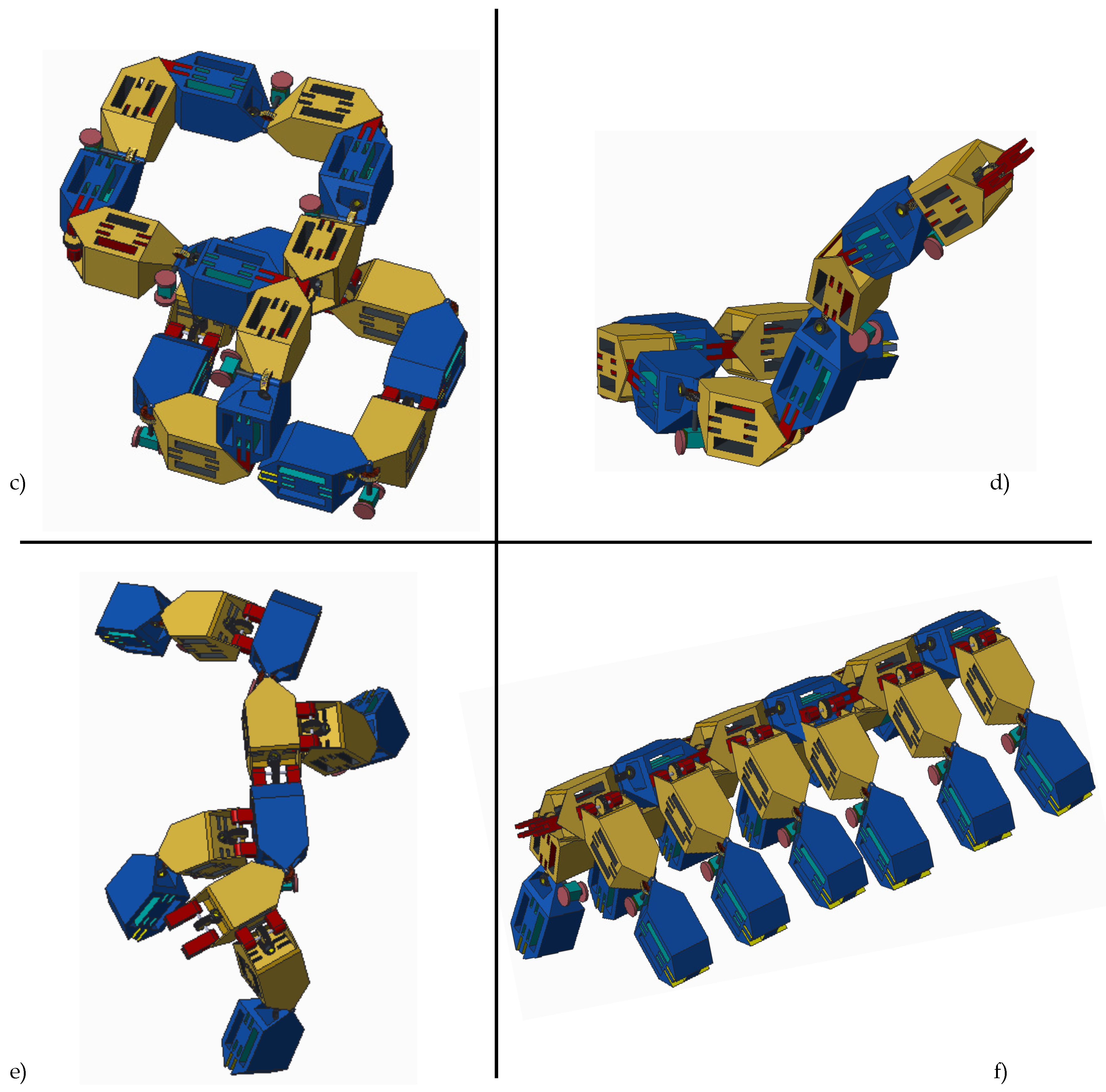
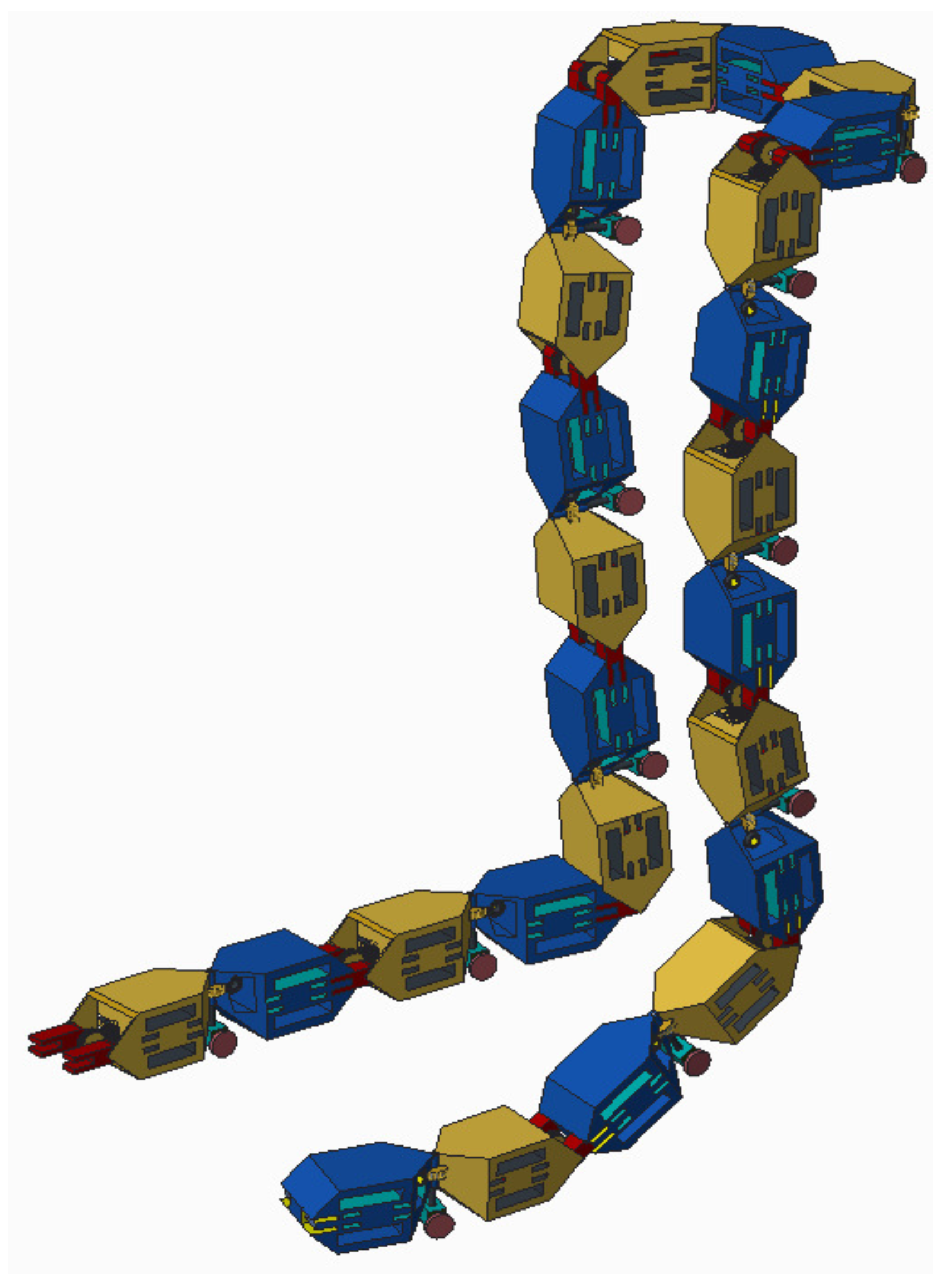
4. HexaMob—Docking and Structures
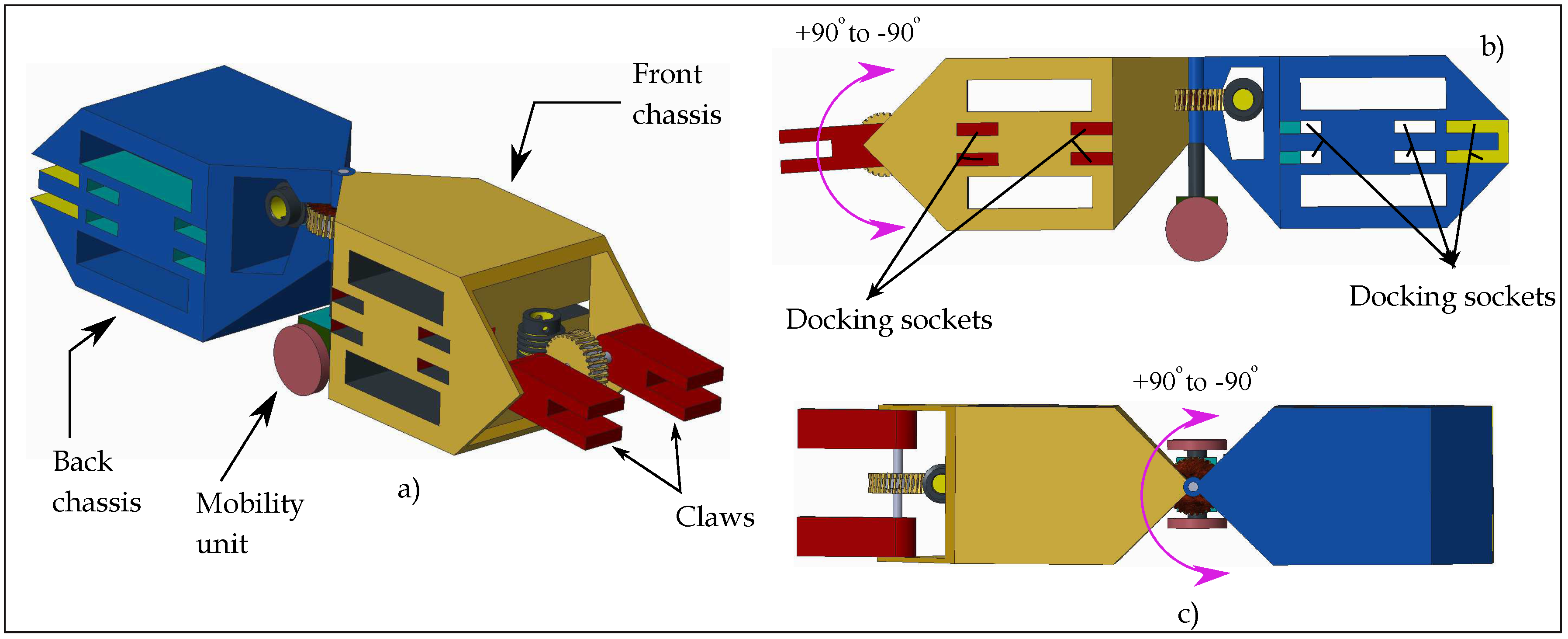
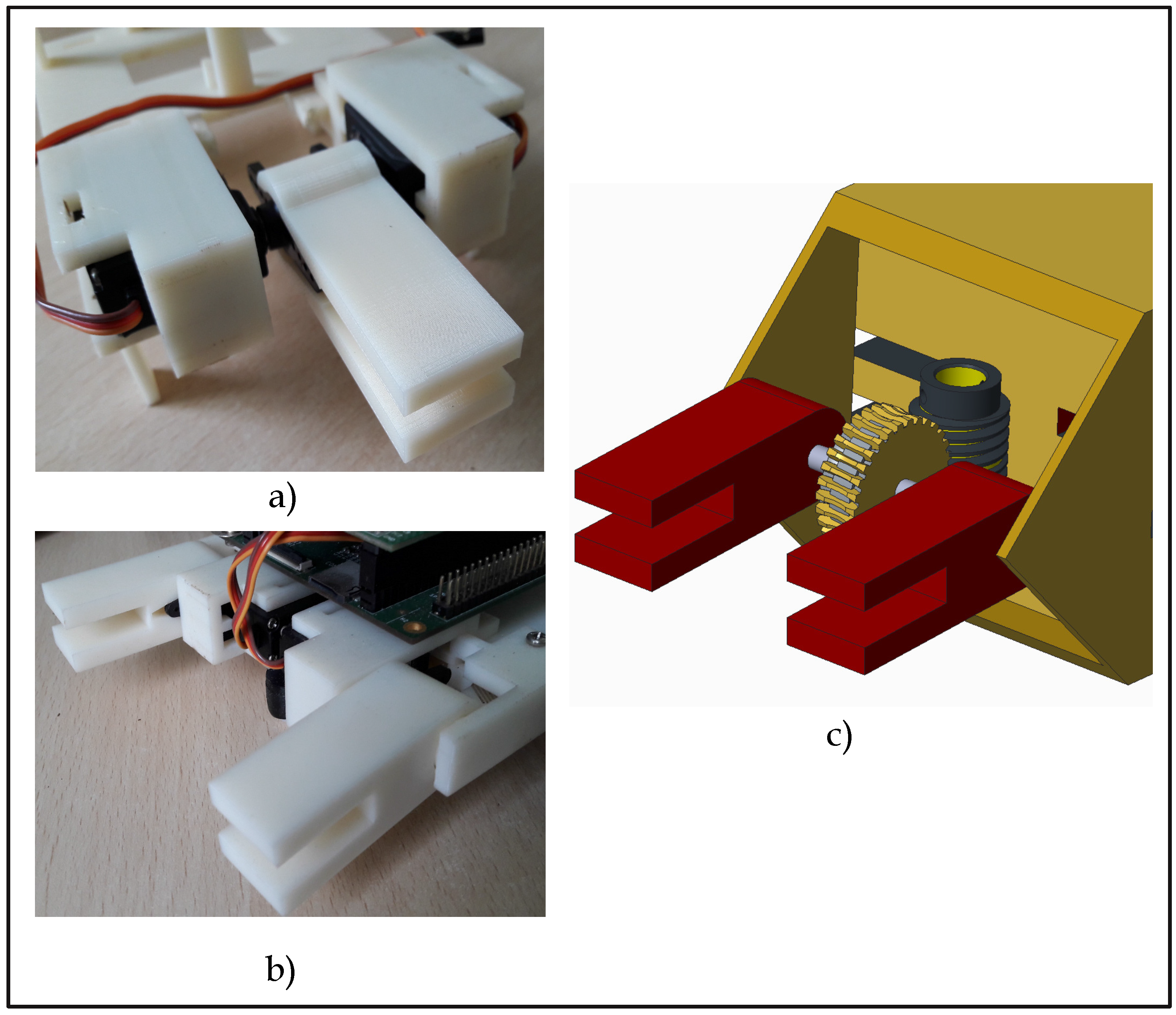
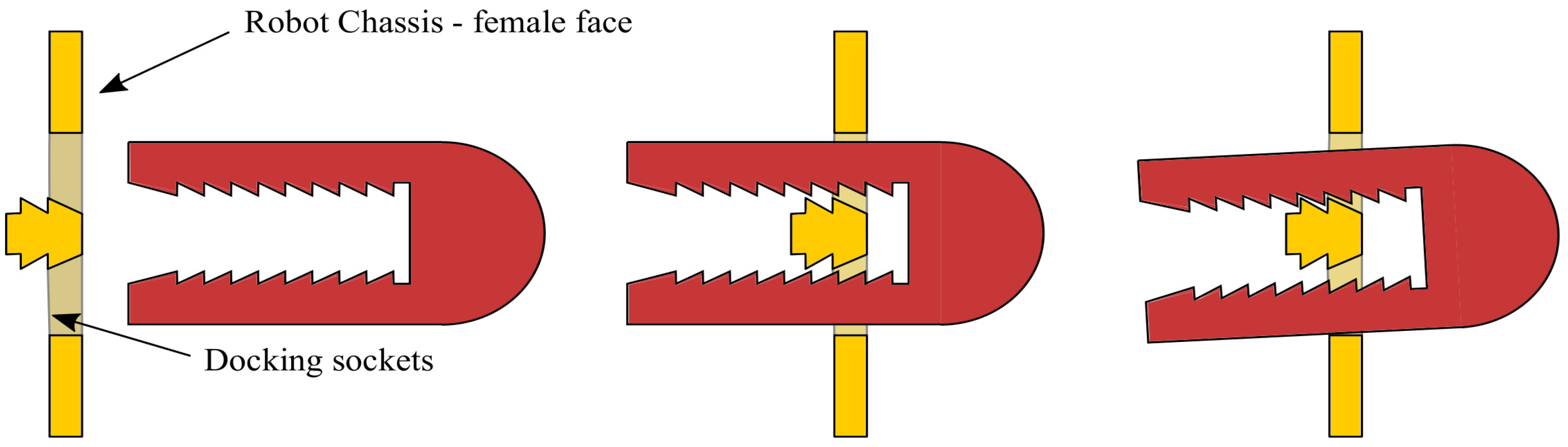
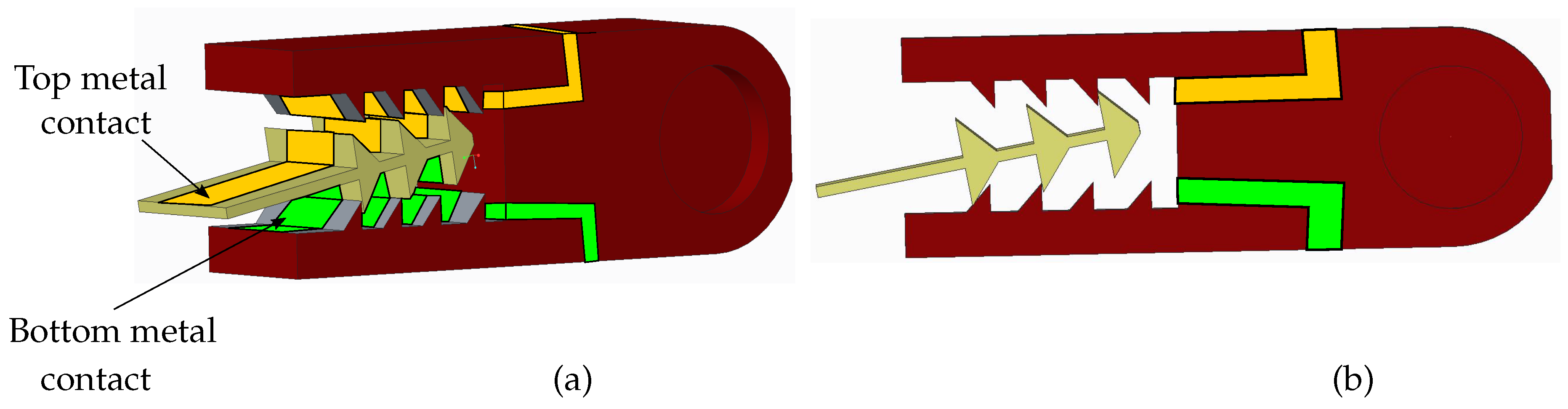
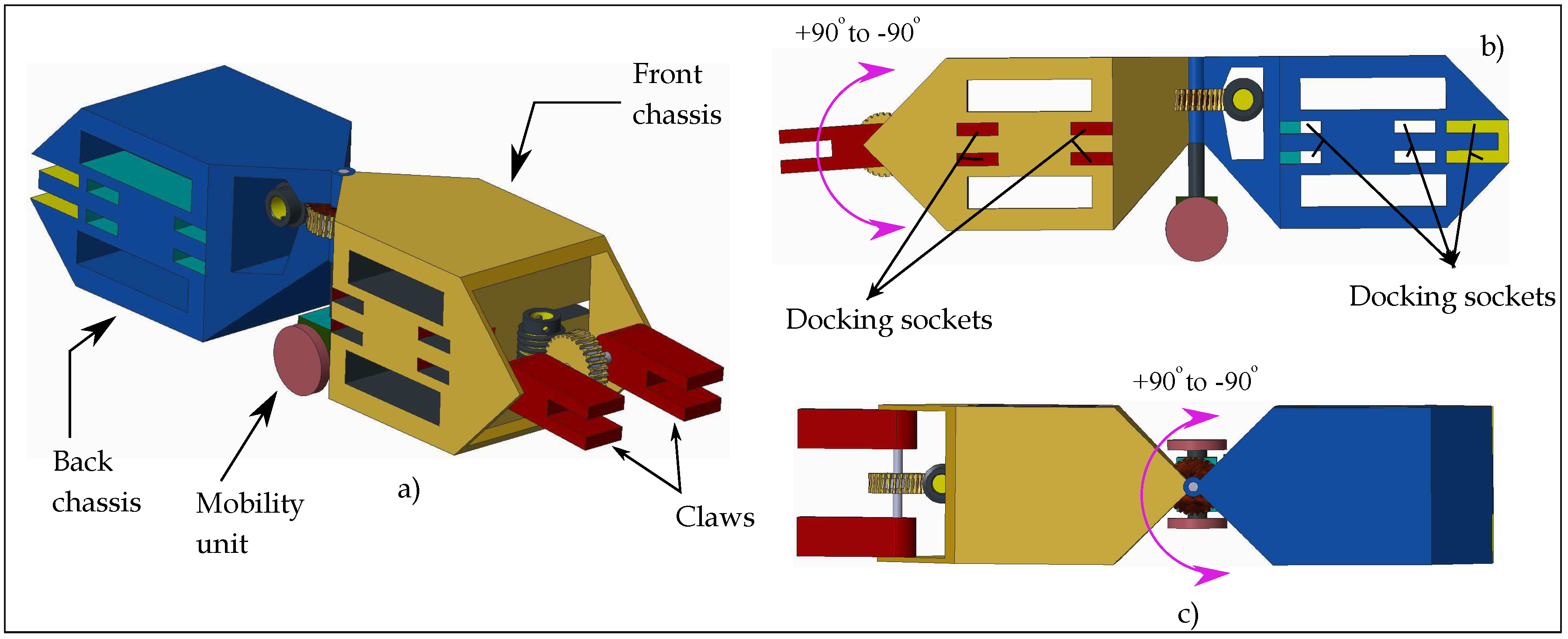
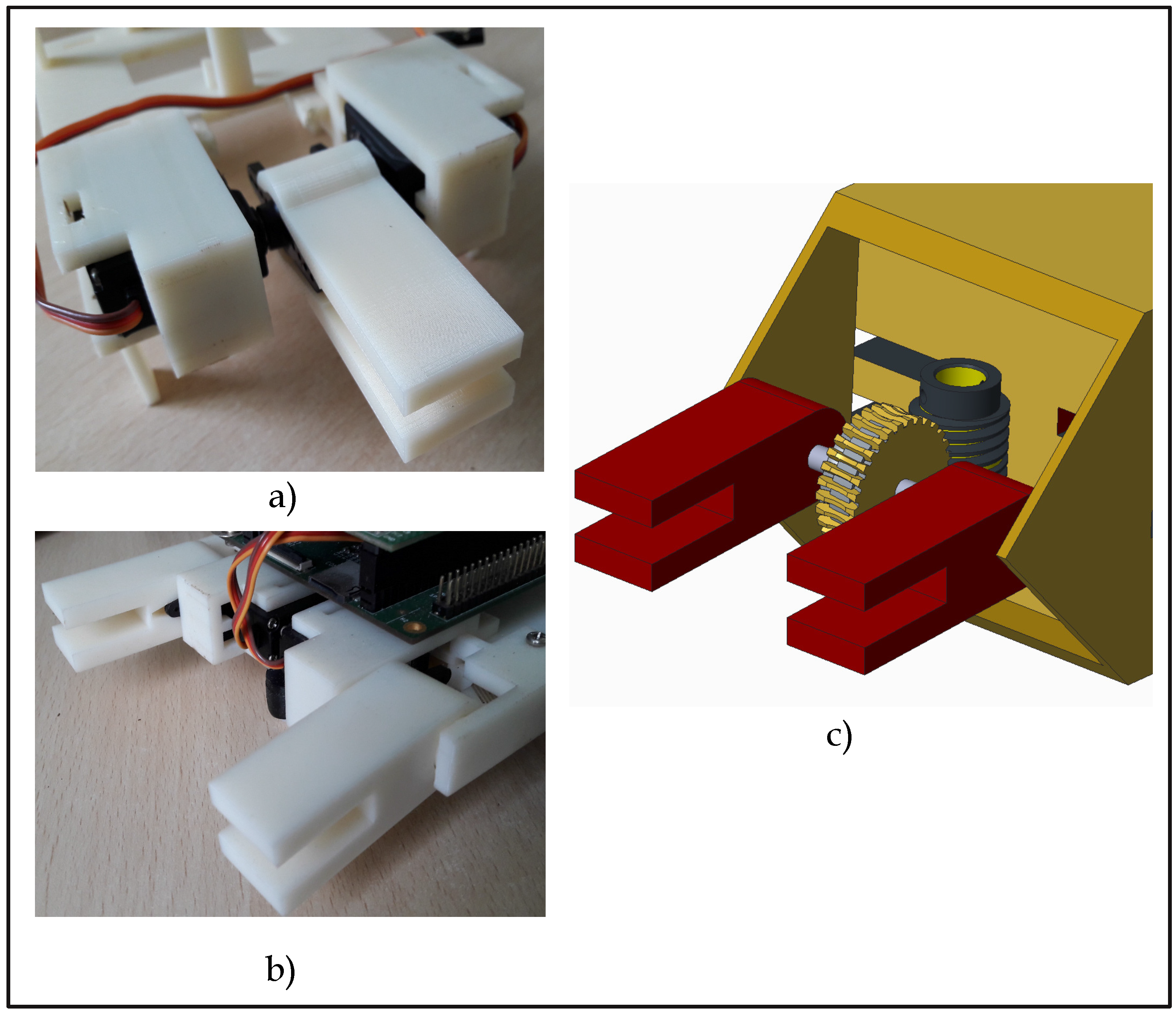
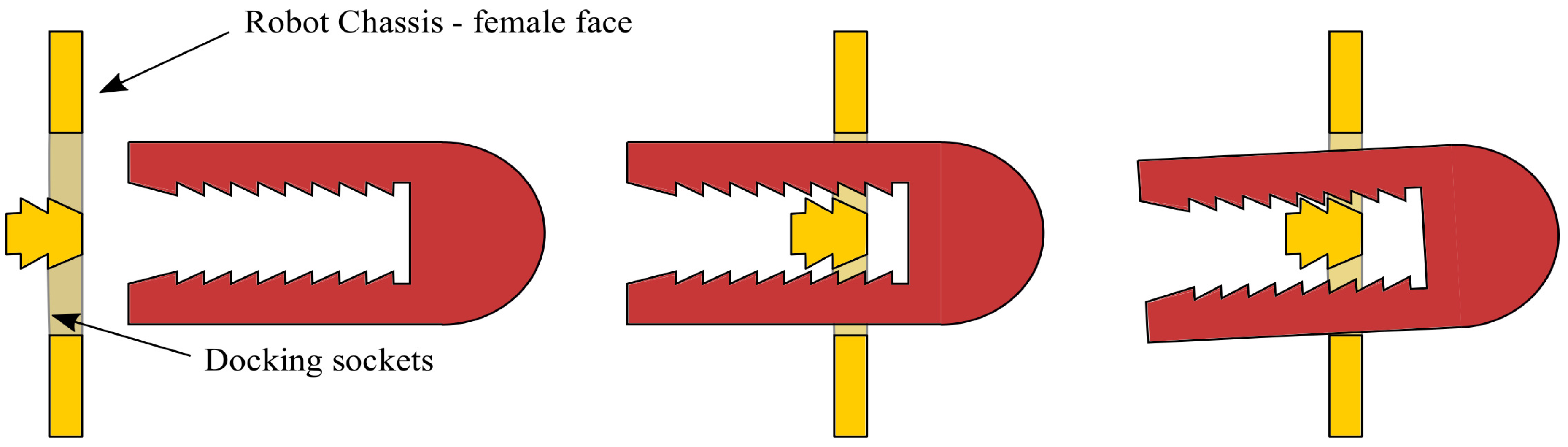
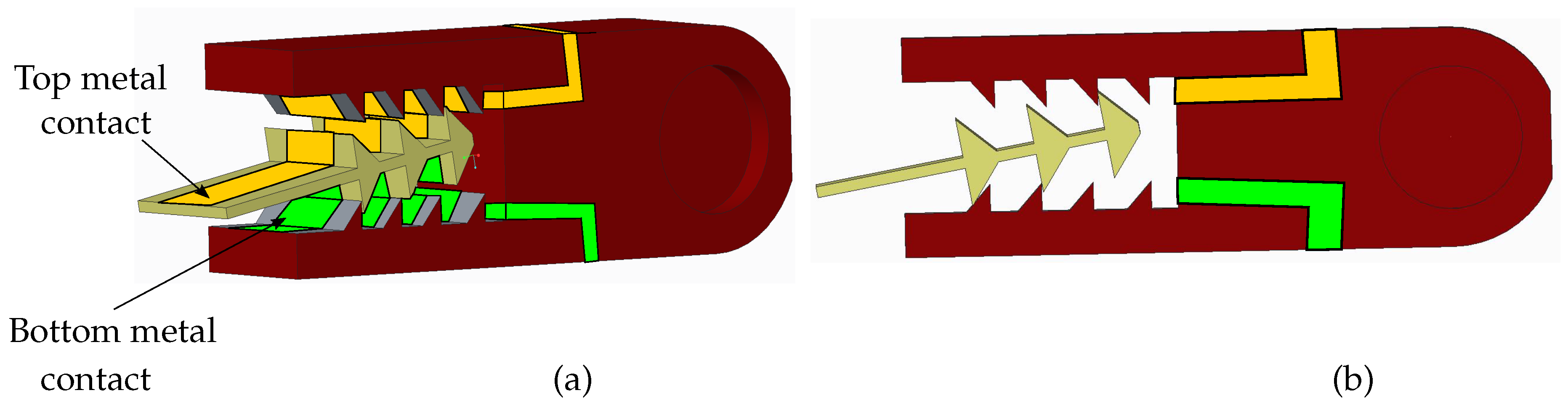
4.1. Twin-Claw Mechanism
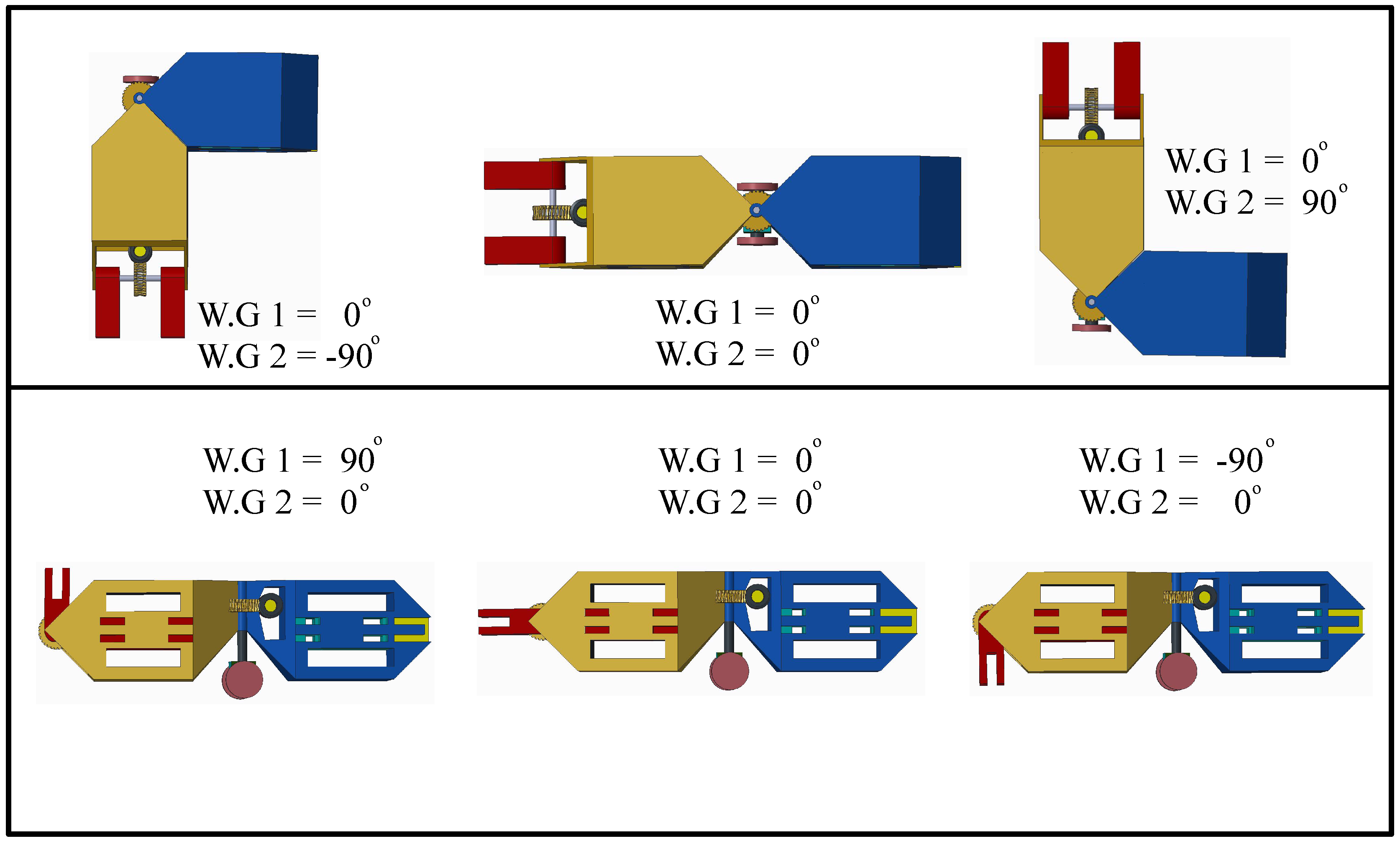
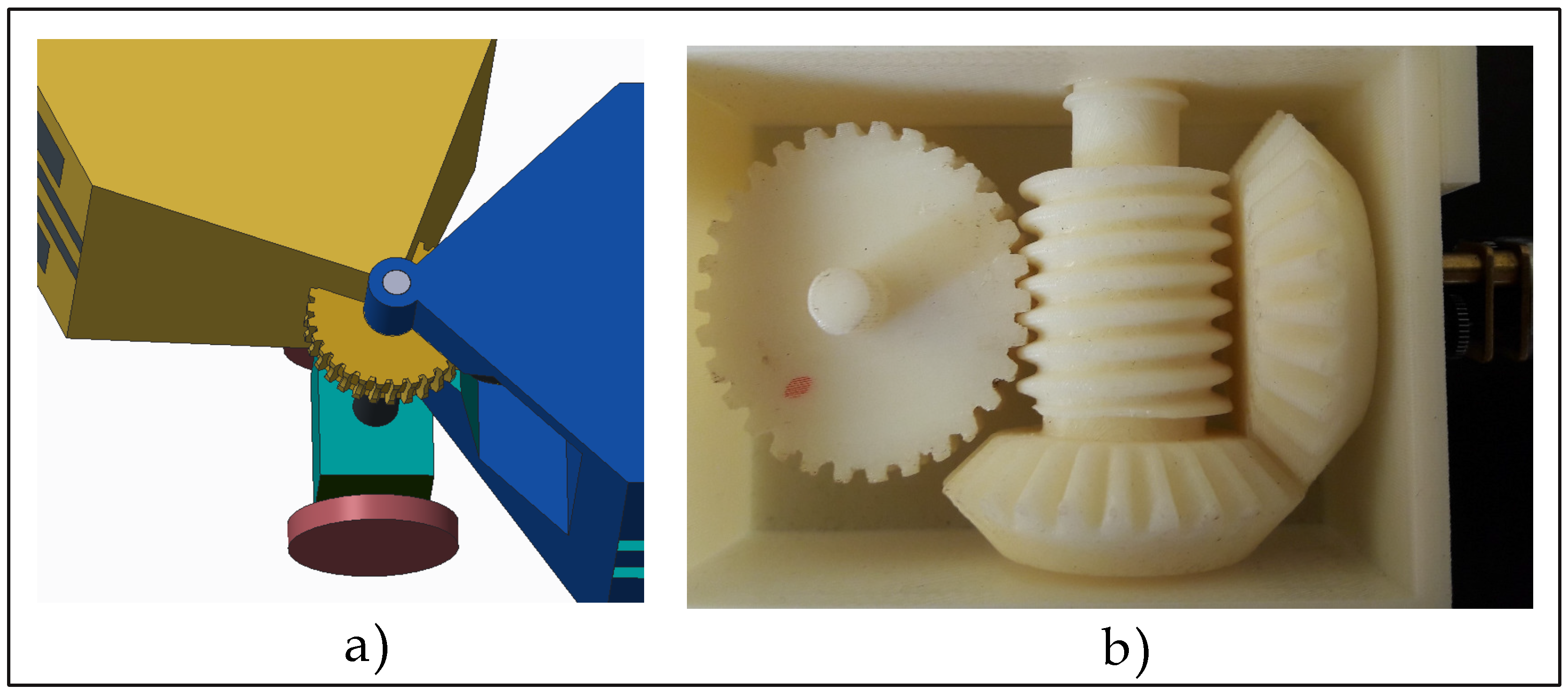
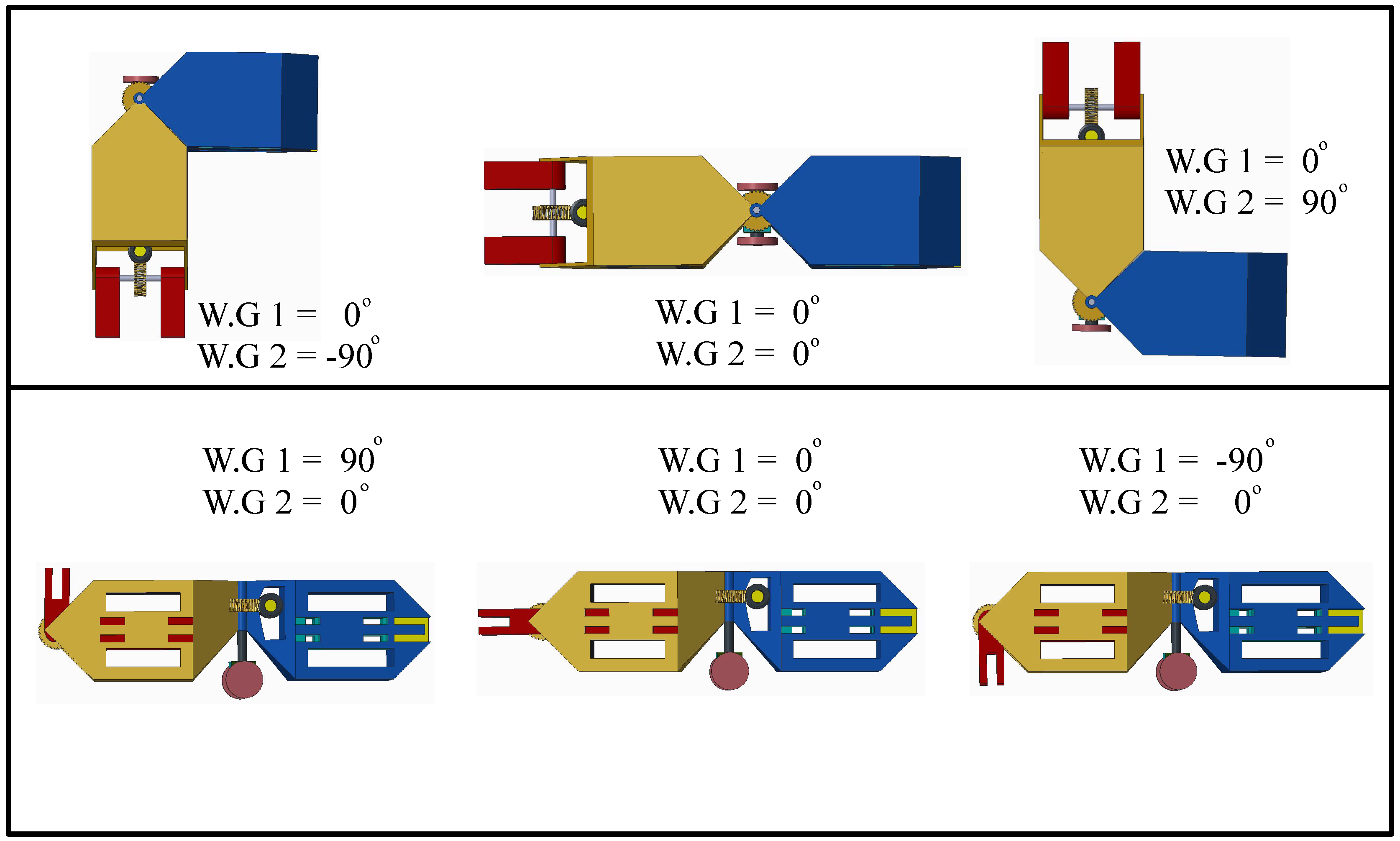
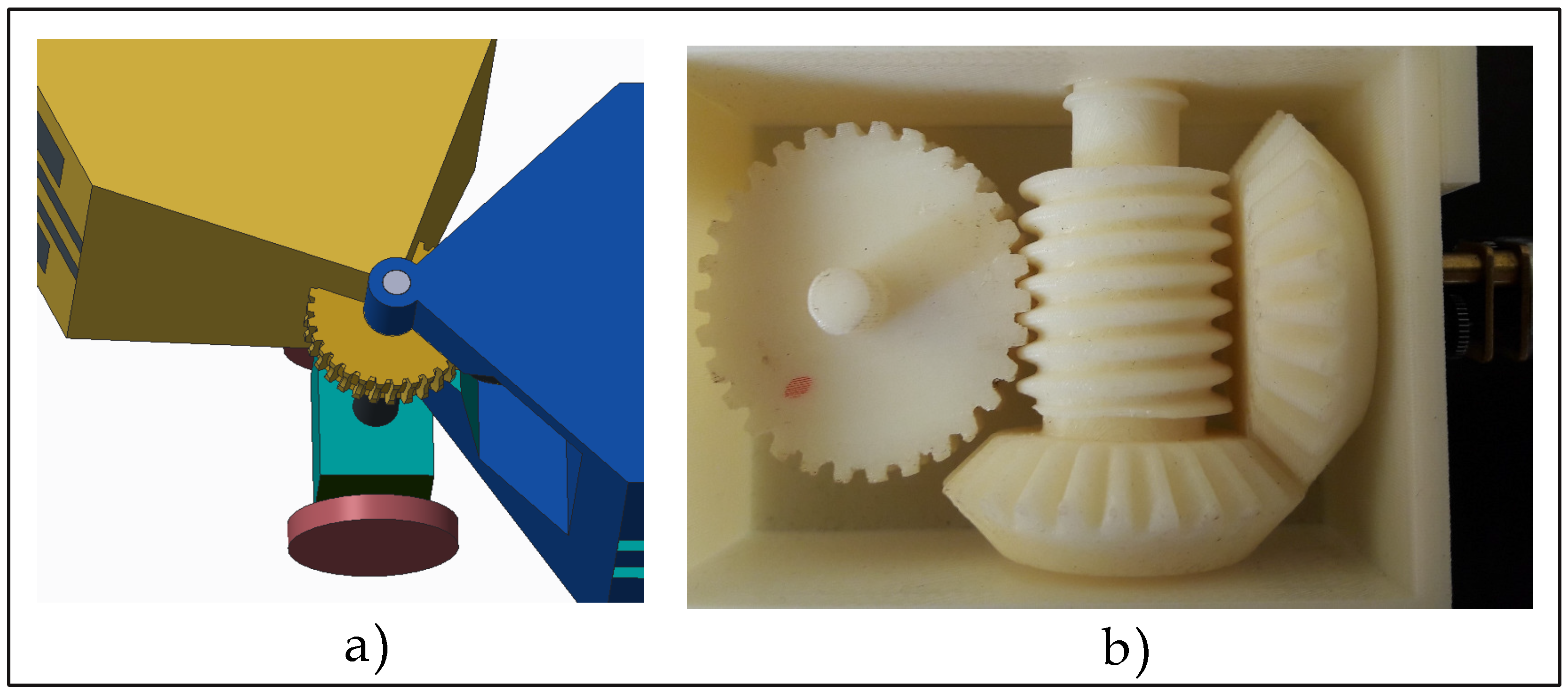
4.2. Hinge Coupled Worm Gear
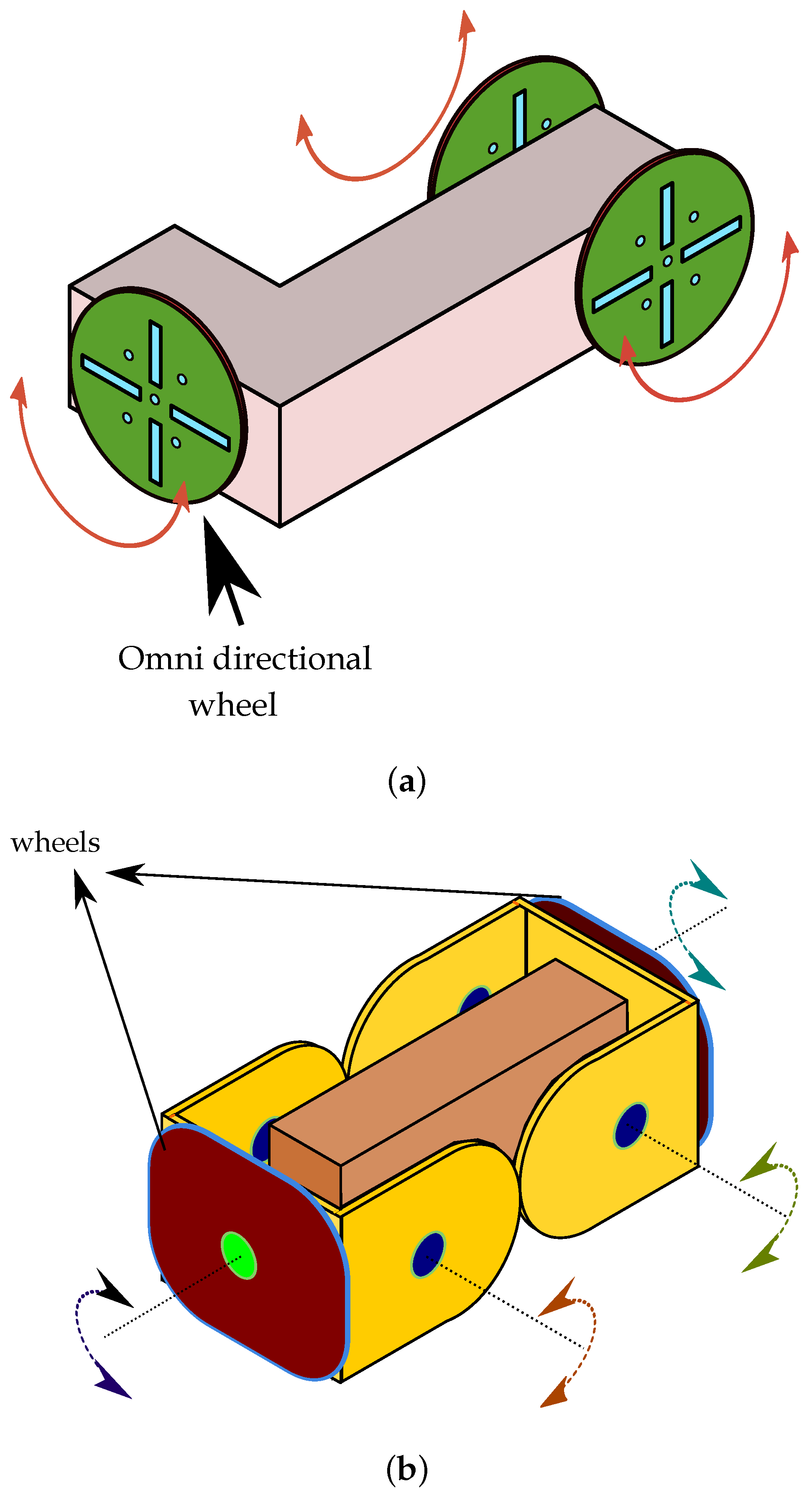
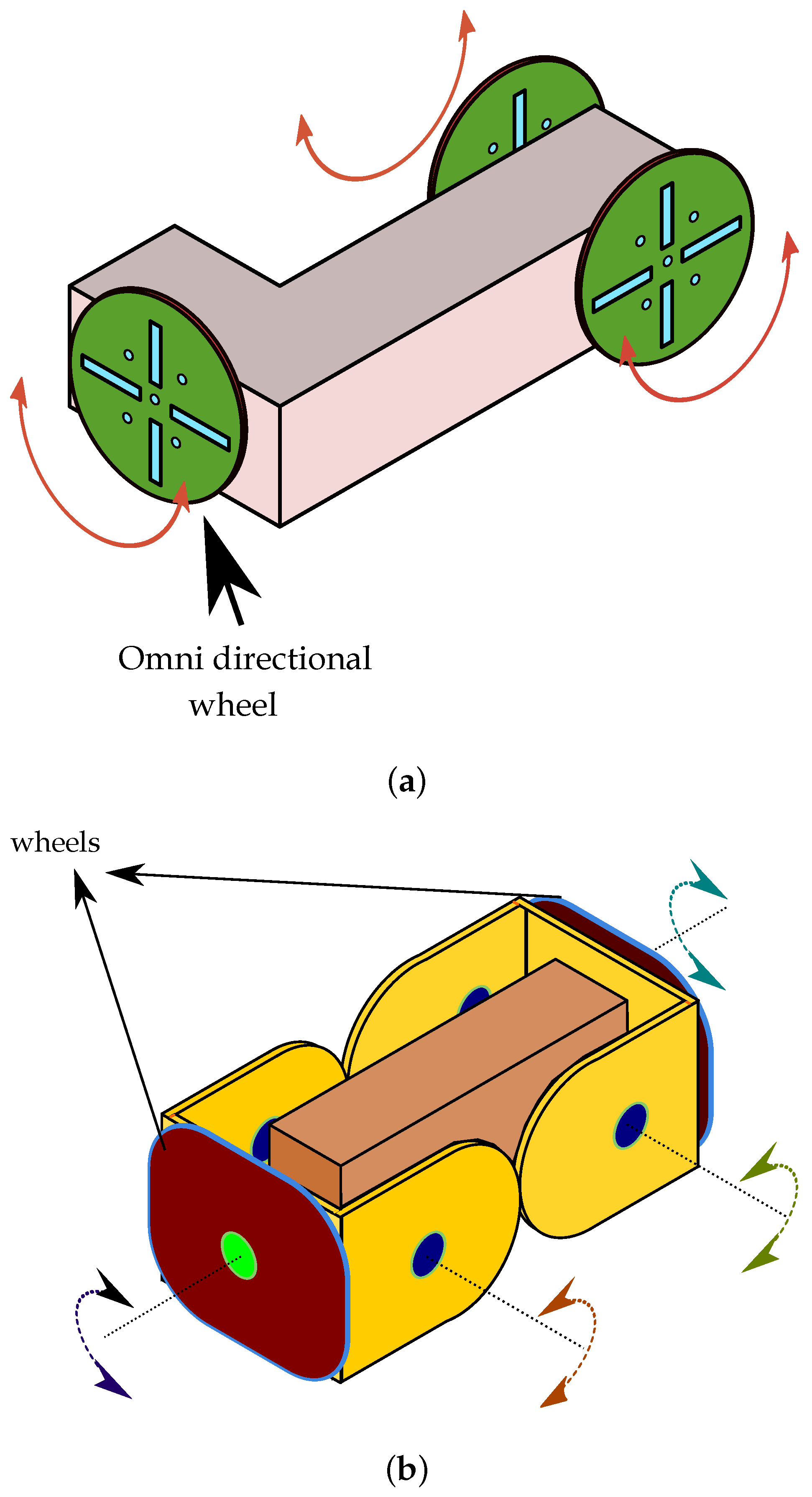
4.3. HexaMob—Mobility
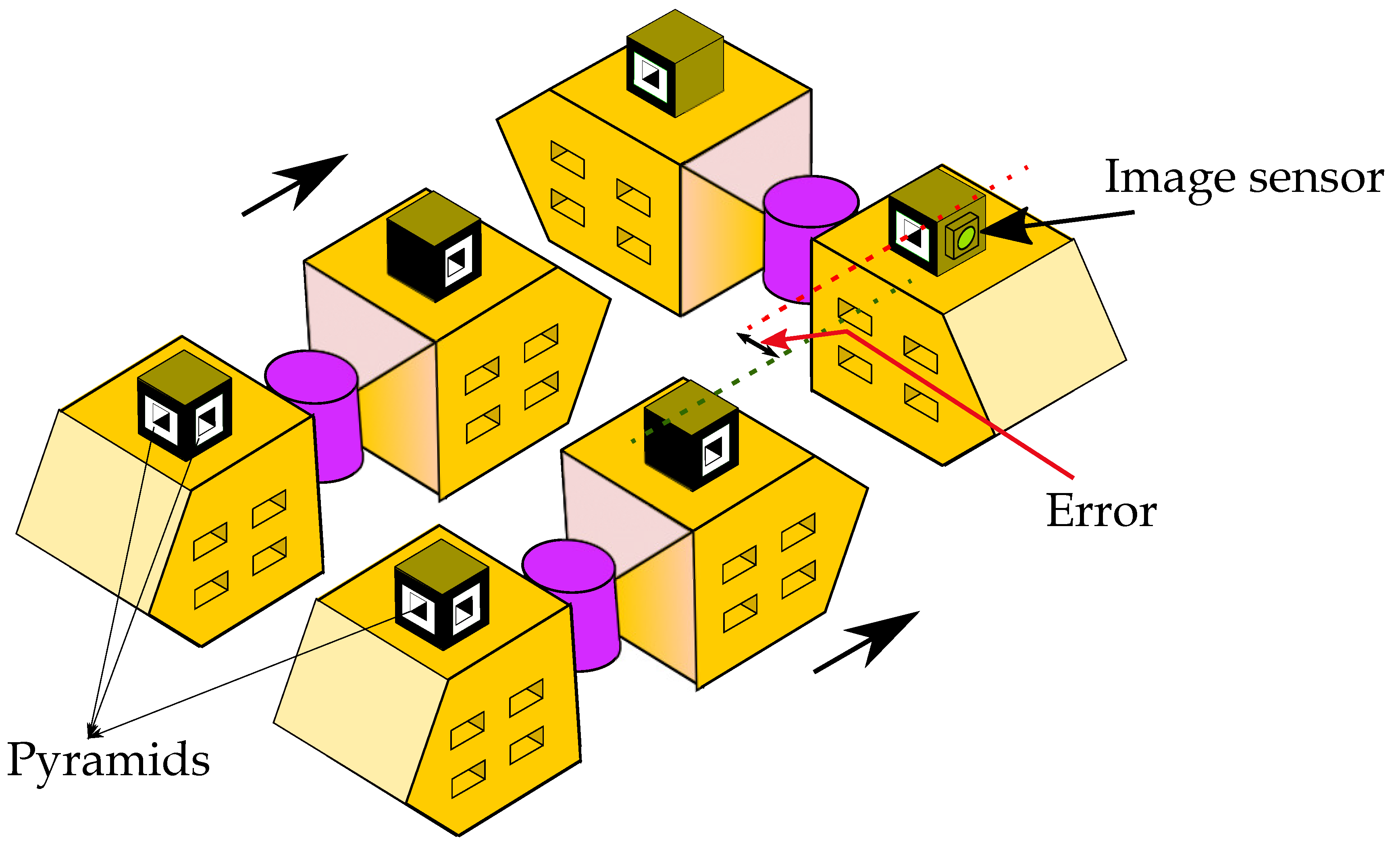
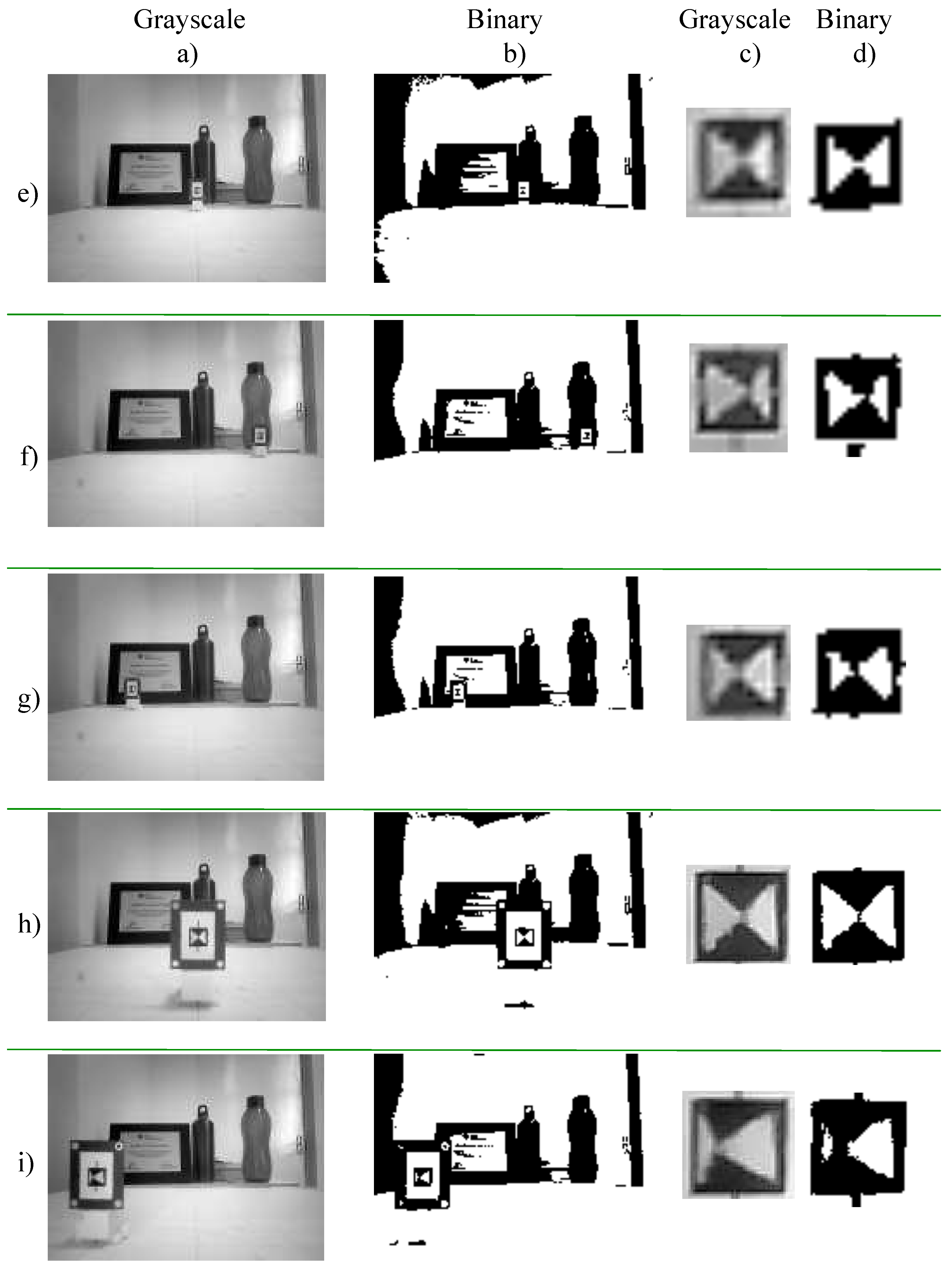
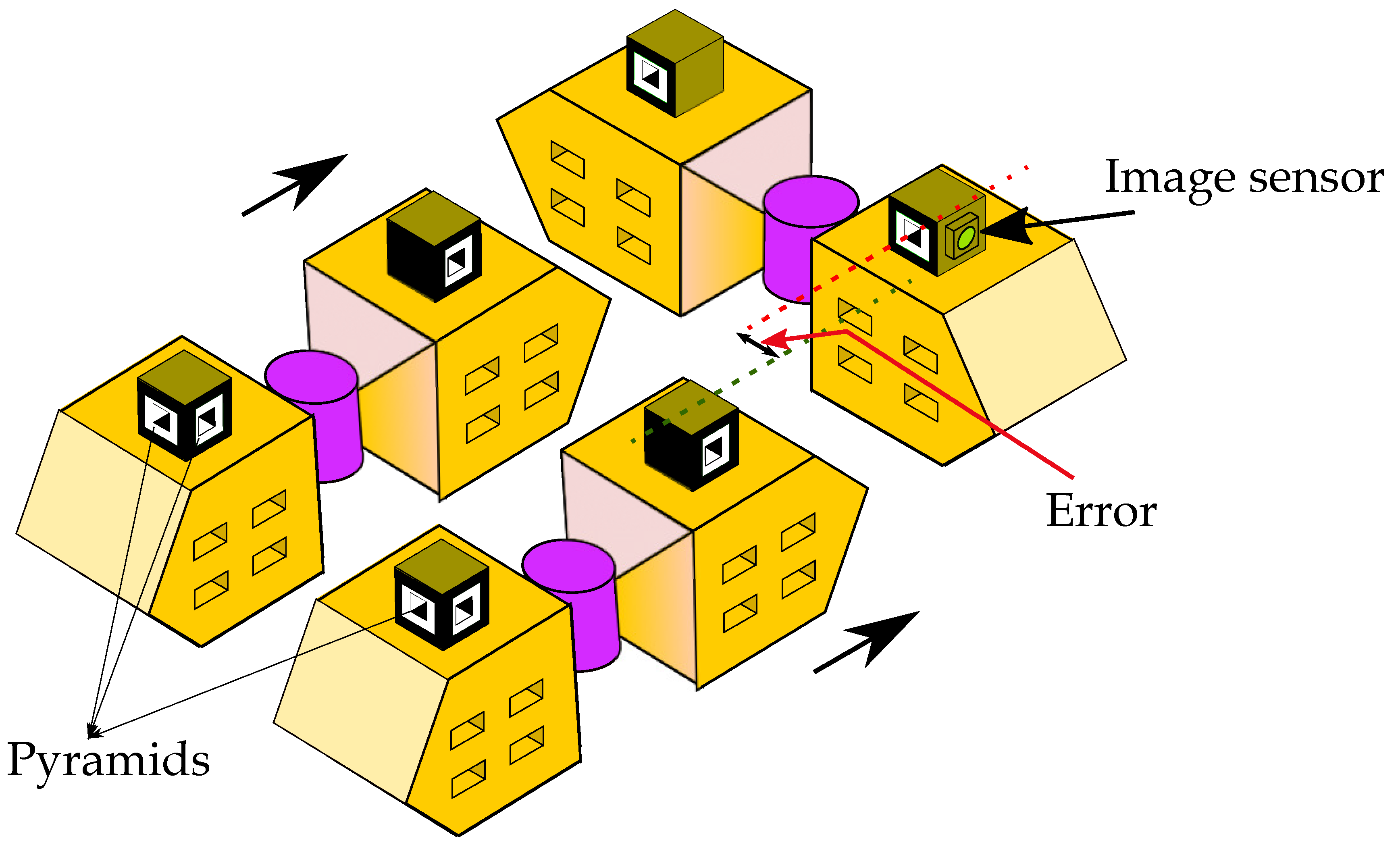
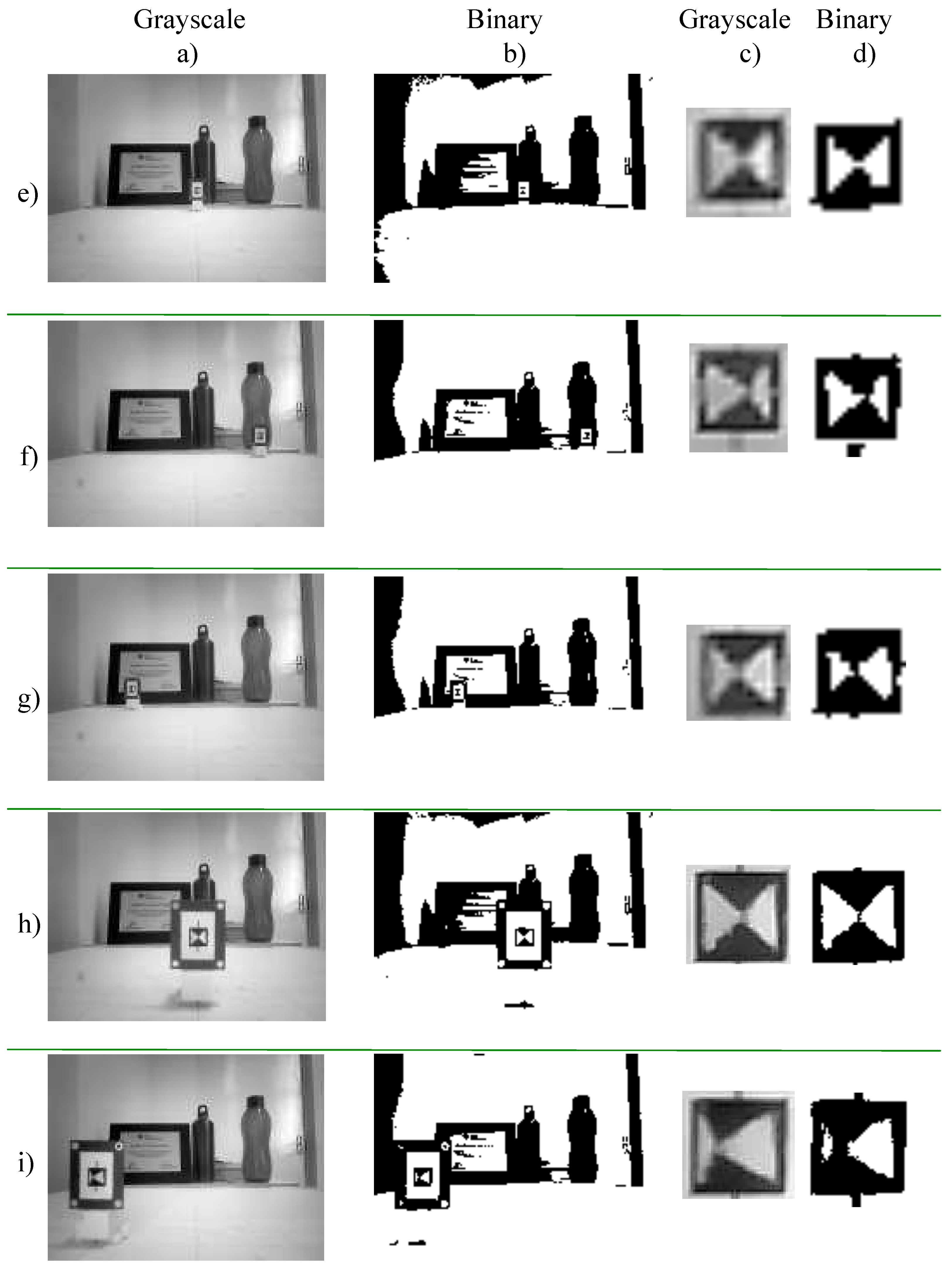
4.4. Vision System
| Algorithm 1 Alignment |
|
4.5. Power and Communication Sharing
5. Path to Implementation
6. Results and Conclusions
Author Contributions
Conflicts of Interest
References
- Yim, M.; Shen, W.M.; Salemi, B.; Rus, D.; Moll, M.; Lipson, H.; Klavins, E. Modular Self-reconfigurable Robot Systems: Challenges and Opportunities for the Future. IEEE Robot. Autom. Mag. 2007, 14, 43–52. [Google Scholar] [CrossRef]
- Baca, J.; Pagala, P.; Rossi, C.; Ferre, M. Modular robot systems towards the execution of cooperative tasks in large facilities. Robot. Auton. Syst. 2015, 66, 159–174. [Google Scholar] [CrossRef]
- Chennareddy, S.S.R.; Agrawal, A.; Karuppiah, A. Modular Self-Reconfigurable Robotic Systems: A Survey on Hardware Architectures. J. Robot. 2017, 2017, 1–19. [Google Scholar]
- Moubarak, P.; Ben-Tzvi, P. Modular and reconfigurable mobile robotics. Robot. Auton. Syst. 2012, 60, 1648–1663. [Google Scholar] [CrossRef]
- Ahmadzadeh, H.; Masehian, E.; Asadpour, M. Modular Robotic Systems: Characteristics and Applications. J. Intell. Robot. Syst. 2016, 81, 317–357. [Google Scholar] [CrossRef]
- Fukuda, T.; Nakagawa, S. Dynamically reconfigurable robotic system. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988; pp. 1581–1586. [Google Scholar]
- Endo, G.; Togawa, K.; Hirose, S. Study on self-contained and terrain adaptive active cord mechanism. J. Robot. Soc. Jpn. 2000, 18, 419–425. [Google Scholar] [CrossRef]
- Togawa, K.; Mori, M.; Hirose, S. Study on three-dimensional active cord mechanism: Development of ACM-R2. In Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems, (IROS 2000) (Cat. No. 00CH37113), Takamatsu, Japan, 31 October–5 November 2000; Volume 3, pp. 2242–2247. [Google Scholar]
- Mori, M.; Hirose, S. Development of active cord mechanism ACM-R3 with agile 3D mobility. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems, Maui, HI, USA, 29 October–3 November 2001; Volume 3, pp. 1552–1557. [Google Scholar]
- Brown, H.B.; Vande Weghe, J.M.; Bererton, C.A.; Khosla, P.K. Millibot trains for enhanced mobility. IEEE/ASME Trans. Mechatron. 2002, 7, 452–461. [Google Scholar] [CrossRef]
- Kawakami, A.; Torii, A.; Motomura, K.; Hirose, S. SMC Rover: Planetary Rover with Transformable Wheels. In Proceedings of the 41st SICE Annual Conference on SICE 2002, Osaka, Japan, 5–7 August 2002; Volume 5, pp. 498–506. [Google Scholar]
- Wei, H.; Chen, Y.; Tan, J.; Wang, T. Sambot: A self-assembly modular robot system. IEEE/ASME Trans. Mechatron. 2011, 16, 745–757. [Google Scholar] [CrossRef]
- Harada, K.; Russo, S.; Ranzani, T.; Menciassi, A.; Dario, P. Design of Scout Robot as a robotic module for symbiotic multi-robot organisms. In Proceedings of the 2011 International Symposium on Micro-NanoMechatronics and Human Science (MHS), Nagoya, Japan, 6–9 November 2011. [Google Scholar]
- Russo, S.; Harada, K.; Ranzani, T.; Manfredi, L.; Stefanini, C.; Menciassi, A.; Dario, P. Design of a robotic module for autonomous exploration and multimode locomotion. IEEE/ASME Trans. Mechatron. 2013, 18, 1757–1766. [Google Scholar] [CrossRef]
- Zhang, Y.; Song, G.; Liu, S.; Qiao, G.; Zhang, J.; Sun, H. A Modular Self-Reconfigurable Robot with Enhanced Locomotion Performances: Design, Modeling, Simulations, and Experiments. J. Intell. Robot. Syst. Theory Appl. 2016, 81, 377–393. [Google Scholar] [CrossRef]
- Yim, M. New locomotion gaits. In Proceedings of the 1994 IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; pp. 2508–2514. [Google Scholar]
- Rubenstein, M.; Payne, K.; Will, P.; Shen, W.-M. Docking among independent and autonomous CONRO self-reconfigurable robots. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 3, pp. 2877–2882. [Google Scholar]
- Yim, M.; Zhang, Y.; Roufas, K.; Duff, D.; Eldershaw, C. Connecting and disconnecting for chain self-reconfiguration with polybot. IEEE/ASME Trans. Mechatron. 2002, 7, 442–451. [Google Scholar] [CrossRef]
- Qiao, G.; Song, G.; Zhang, J.; Sun, H.; Wang, W.; Song, A. Design of transmote: A modular self-reconfigurable robot with versatile transformation capabilities. In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guangzhou, China, 11–14 December 2012; IEEE: Piscataway, NJ, USA; pp. 1331–1336. [Google Scholar]
- Dasgupta, P.; Baca, J.; Hossain, S.; Dutta, A.; Nelson, C.A. Mechanical design and computational aspects for locomotion and reconfiguration of the ModRED modular robot. In Proceedings of the 2013 International Conference on Autonomous Agents and Multi-Agent Systems, St. Paul, MN, USA, 6–10 May 2013; pp. 1359–1360. [Google Scholar]
- Hossain, S.G.M.; Nelson, C.A.; Dasgupta, P. Hardware Design and Testing of ModRED: A Modular Self-Reconfigurable Robot System. In Advances in Reconfigurable Mechanisms and Robots I; Dai, J.S., Zoppi, M., Kong, X., Eds.; Springer: London, UK, 2012; pp. 515–523. [Google Scholar]
- Yim, M.; Shirmohammadi, B.; Sastra, J.; Park, M.; Dugan, M.; Taylor, C.J. Towards robotic self-reassembly after explosion. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 2767–2772. [Google Scholar]
- Jorgensen, M.W.; Ostergaard, E.H.; Lund, H.H. Modular ATRON: Modules for a self-reconfigurable robot. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 2, pp. 2068–2073. [Google Scholar]
- Schultz, U.P.; Bordignon, M.; Stoy, K. Robust and reversible self-reconfiguration. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2009, St. Louis, MO, USA, 10–15 October 2009; pp. 5287–5294. [Google Scholar]
- Kutzer, M.D.M.; Moses, M.S.; Brown, C.Y.; Scheidt, D.H.; Chirikjian, G.S.; Armand, M. Design of a new independently-mobile reconfigurable modular robot. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 2758–2764. [Google Scholar]
- Wolfe, K.C.; Moses, M.S.; Kutzer, M.D.M.; Chirikjian, G.S. M 3Express: A low-cost independently-mobile reconfigurable modular robot. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 2704–2710. [Google Scholar]
- Ko, D.; Cheng, H.H. Programming reconfigurable modular robots. In Proceedings of the 2012 IEEE/ASME 8th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications, Suzhou, China, 8–10 July 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 160–165. [Google Scholar]
- Davey, J.; Kwok, N.; Yim, M. Emulating self-reconfigurable robots—Design of the SMORES system. In Proceedings of the 2012 IEEE International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 4464–4469. [Google Scholar]
- Murata, S.; Yoshida, E.; Kamimura, A.; Kurokawa, H.; Tomita, K.; Kokaji, S. M-TRAN: Self-reconfigurable modular robotic system. IEEE/ASME Trans. Mechatron. 2002, 7, 431–441. [Google Scholar] [CrossRef]
- Kurokawa, H.; Kamimura, A.; Yoshida, E.; Tomita, K.; Kokaji, S.; Murata, S. M-TRAN II: Metamorphosis from a four-legged walker to a caterpillar. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 27–31 October 2003; Volume 3, pp. 2454–2459. [Google Scholar]
- Kurokawa, H.; Tomita, K.; Kamimura, A.; Kokaji, S.; Hasuo, T.; Murata, S. Distributed Self-Reconfiguration of M-TRAN III Modular Robotic System. Int. J. Robot. Res. 2008, 27, 373–386. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhao, J.; Cui, X.; Wang, X.; Tang, S.; Zhang, X.; Yin, J. Design and implementation of UBot: A modular Self-Reconfigurable Robot. In Proceedings of the 2013 IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 4–7 August 2013; IEEE: Piscataway, NJ, USA; pp. 1217–1222. [Google Scholar]
- Neubert, J.; Lipson, H. Soldercubes: A self-soldering self-reconfiguring modular robot system. Auton. Robots 2016, 40, 139–158. [Google Scholar] [CrossRef]
- Parrott, C.; Dodd, T.J.; Gross, R. HyMod: A 3-DOF Hybrid Mobile and Self-Reconfigurable Modular Robot and its Extensions. In Proceedings of the 13th International Symposium on Distributed Autonomous Robotic Systems, London, UK, 6–9 November 2016. [Google Scholar]
- Liedke, J.; Matthias, R.; Winkler, L.; Worn, H. The Collective Self-reconfigurable Modular Organism (CoSMO). In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, Australia, 9–12 July 2013; pp. 1–6. [Google Scholar]
- Hamlin, G.J.; Sanderson, A.C. TETROBOT: A modular approach to parallel robotics. IEEE Robot. Autom. Mag. 1997, 4, 42–50. [Google Scholar] [CrossRef]
- Ramchurn, V.; Richardson, R.C.; Nutter, P. ORTHO-BOT: A Modular Reconfigurable Space Robot Concept. In Proceedings of the 8th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines (CLAWAR 2005), London, UK, 13–15 September 2005; Tokhi, M.O., Virk, G.S., Hossain, M.A., Eds.; Springer: Berlin, Germany, 2006; pp. 659–666. [Google Scholar]
- Lyder, A.; Garcia, R.F.M.; Stoy, K. Mechanical design of Odin, an extendable heterogeneous deformable modular robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 883–888. [Google Scholar]
- Campbell, J.; Pillai, P.; Goldstein, S.C. The robot is the tether: Active, adaptive power routing for modular robots with unary inter-robot connectors. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 2960–2967. [Google Scholar]
- Shimizu, M.; Mori, T.; Ishiguro, A. A development of a modular robot that enables adaptive reconfiguration. In Proceedings of the 2006 IEEE International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 174–179. [Google Scholar]
- Karagozler, M.E.; Goldstein, S.C.; Reid, J.R. Stress-driven MEMS assembly + electrostatic forces = 1 mm diameter robot. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 2763–2769. [Google Scholar]
- Krivokon, M.; Everist, J.; Rubenstein, M.; Venkatesh, J. Multimode locomotion via SuperBot robots. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; IEEE: Piscataway, NJ, USA; pp. 2552–2557. [Google Scholar]
- Shen, W.M.; Kovac, R.; Rubenstein, M. Singo: A single-end-operative and genderless connector for self-reconfiguration, self-assembly and self-healing. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 4253–4258. [Google Scholar]
- Liu, W.; Winfield, A.F.T. Morphogenetic Engineering. Morphog. Eng. 2012, 9, 61–87. [Google Scholar]
- Ryland, G.G.; Cheng, H.H. Design of iMobot, an intelligent reconfigurable mobile robot with novel locomotion. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 60–65. [Google Scholar]
- Sfcl, I.M.T.; Chung, D.C.; Yoo, B.H.; Cho, Y.S.; Jung, B.I.; Choi, H.S.; Sung, T.H. Design and Characterization of the EP-Face Connector. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, South Korea, 9–14 October 2016. [Google Scholar]
- Jing, G.; Tosun, T.; Yim, M.; Kress-Gazit, H. An End-To-End System for Accomplishing Tasks with Modular Robots. In Proceedings of the Robotics: Science and Systems, Ann Arbor, MI, USA, 18–22 June 2016. [Google Scholar]
- Sankhar, C.S.; Agrawal, A.; Anupama, K.R. SQ-BOT—A Modular Robot Prototype for Self- Reconfiguring Structures. In Proceedings of the International Conference on Robotics: Current Trends and Future Challenges (RCTFC), Thanjavur, India, 19–20 December 2016; IEEE: Piscataway, NJ, USA; pp. 1–6. [Google Scholar]
- An, B.K. EM-Cube: Cube-shaped, self-reconfigurable robots sliding on structure surfaces. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 3149–3155. [Google Scholar]
- Murata, S.; Kurokawa, H.; Kokaji, S. Self-assembling machine. In Proceedings of the IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; IEEE: Piscataway, NJ, USA; pp. 441–448. [Google Scholar]
- Romanishin, J.W.; Gilpin, K.; Claici, S.; Rus, D. 3D M-Blocks: Self-reconfiguring robots capable of locomotion via pivoting in three dimensions. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 1925–1932. [Google Scholar]
- Anupama, K.R.; Reddy, C.S.S.; Shenoy, M.V. FlexEye—A flexible camera mote for sensor networks. In Proceedings of the 2015 2nd International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 19–20 February 2015; IEEE: Piscataway, NJ, USA; pp. 1010–1015. [Google Scholar]
- Richard Budynas, K.N. Shigley’s Mechanical Engineering Design, 10th ed.; McGraw Hill: New York, NY, USA, 2014. [Google Scholar]
- Rothbart, H.A.; Brown, T.H. Mechanical Design Handbook: Measurement, Analysis and Control of Dynamic Systems (Handbooks); McGraw Hill: New York, NY, USA, 2006. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structures | Locomotion | Form-Factor | Reconfiguration |
|---|---|---|---|
| Lattice | Mobile | Micro | Stochastic |
| Chain | Co-ordinated | Mini | Deterministic |
| Hybrid | External | Macro | |
| Truss | |||
| Free-form |
| Robot | Shape | Docking | Connection | Mobility | Reference | ||
|---|---|---|---|---|---|---|---|
| Interface | Actuator | Active | Inactive | ||||
| M3 | ’L’ shaped | Hooks | DC motor | 3 | 0 | Omni directional | [25] |
| M3express | ’L’ shaped | Latch | SMA, Servo | 3 | 0 | Omni directional | [26] |
| iMobot | Cuboid | Latch | Manual | 0 | 6 | Differential drive | [45] |
| SMORES | Cube | Magnets | DC motor | 3 | 1 | Differential drive | [28] |
| Trimobot | Hexagonal | Hooks | DC motor | 1 Male | 5 Female | Omni directional | [15] |
| CoSMO | Cube | Lock | DC motor | 4 | 0 | Omni- directional | [35] |
| Scout | Cube | Lock | DC motor | 4 | 0 | Tracks | [13,14] |
| Sambot | Cube | Hooks | DC motor | 1 Male | 5 female | Differential drive | [12] |
| HexaMob | Hexagonal | Claw | Worm gear | 1 Male | 5 Female | Differential drive | |
| Robot | Degrees of Freedom | Back-Driving Restriction Capabilities | Power Sharing Capabilities | Reconfiguration Autonomous Features | Reference |
|---|---|---|---|---|---|
| M3 | 3D | ✘ | ✘ | [25] | |
| M3express | 3D | ✘ | ✘ | [26] | |
| iMobot | 3D | ✘ | ✘ | [45] | |
| SMORES | 3D | ✘ | ✘ | [28] | |
| Trimobot | 3D | ✘ | ✘ | [15] | |
| CoSMO | 3D | ✘ | ✓ | [35] | |
| Scout | 3D | ✘ | ✓ | [13,14] | |
| Sambot | 3D | ✘ | ✓ | [12] | |
| HexaMob | 3D | ✓ | ✓ |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
CH., S.S.R.; Patlolla, S.; Agrawal, A.; K. R., A. HexaMob—A Hybrid Modular Robotic Design for Implementing Biomimetic Structures. Robotics 2017, 6, 27. https://doi.org/10.3390/robotics6040027
CH. SSR, Patlolla S, Agrawal A, K. R. A. HexaMob—A Hybrid Modular Robotic Design for Implementing Biomimetic Structures. Robotics. 2017; 6(4):27. https://doi.org/10.3390/robotics6040027
Chicago/Turabian StyleCH., Sasanka Sankhar Reddy, Sharath Patlolla, Anita Agrawal, and Anupama K. R. 2017. "HexaMob—A Hybrid Modular Robotic Design for Implementing Biomimetic Structures" Robotics 6, no. 4: 27. https://doi.org/10.3390/robotics6040027
APA StyleCH., S. S. R., Patlolla, S., Agrawal, A., & K. R., A. (2017). HexaMob—A Hybrid Modular Robotic Design for Implementing Biomimetic Structures. Robotics, 6(4), 27. https://doi.org/10.3390/robotics6040027