Resilient Robots: Concept, Review, and Future Directions


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. The Identity of Resilient Robots
2.1. Resilience and Resilient Robots
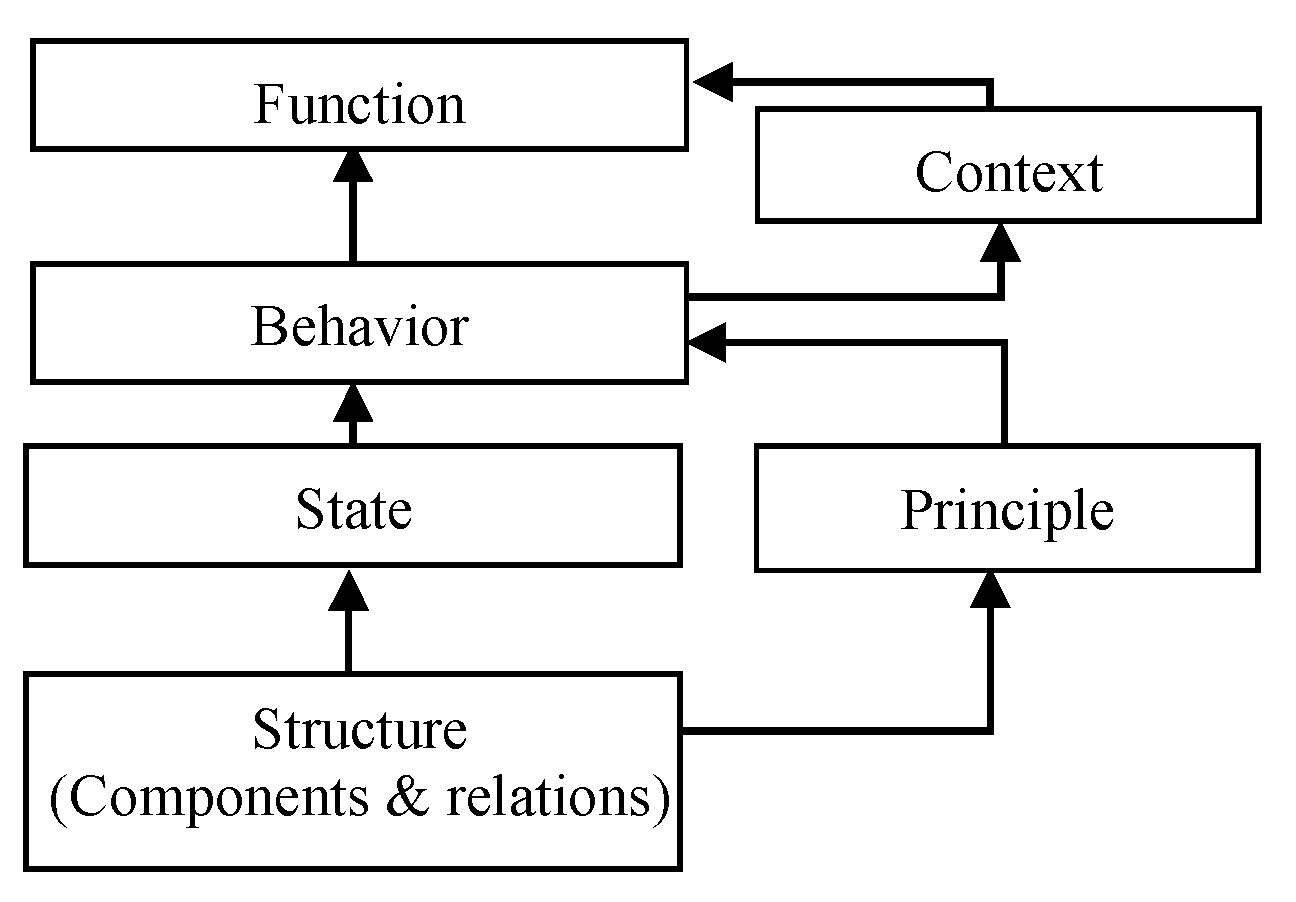
2.2. The Concept of Resilient Robots
- Strategy I:
- Training a remaining system to perform a new behavior, e.g., regeneration of a control system. This strategy refers to the change of a function via behavioral change (i.e., change of the relationship between states). Furthermore, the change of behavior may be due to the change of the principle (e.g., physical effect).
- Strategy II:
- Strategy III:
- Changing the states of components, e.g., changing the length of a bar component; see the so-called adjustable mechanism [20]. This strategy refers to the change of a function via the change of component in itself.
2.3. Summary of the Identity of Resilient Robots
3. Existing Resilient Robots and the Related Robots
3.1. Resilient Robots
3.2. Self-Reconfigurable Robots and Soft Robots
3.2.1. Architecture of Self-Reconfigurable Robots
3.2.2. Connection System
3.2.3. Reconfiguration Problems
3.3. Soft Robots
4. The Principles of Design of Resilient Robots
5. Conclusions and Future Directions
- Identifying the classification of robot failures, and developing methods to predict and prevent the failures.
- Investigating the relationships between recovery strategies and failures, as there may be several strategies available at a point of time when a failure occurs, and one needs to find the best one.
- Developing rapid design tools and fabrication recipes for low-cost but strong resilient robots; modules could switch their role when they fail.
- Developing novel algorithmic approaches, such as learning-based approaches to get reliable autonomous control for resilient robots with consideration of hardware compatibility.
- Developing soft computing techniques for morphological soft robots to allow self-assembly, self-reconfiguration, self-reproduction, self-recovery, etc.
- Determining resilience measurement for different robots affected by different failures. A resilience measure approach would include failure identification and function recovery in terms of time and cost.
- Developing a relationship between resilience and other system properties such as reliability and cost. This is important when a resilient robot is tailored for a particular application.
Acknowledgments
Conflicts of Interest
References
- Chennareddy, S.; Agrawal, A.; Karuppiah, A. Modular Self-Reconfigurable Robotic Systems: A Survey on Hardware Architectures. J. Robot. 2017, 2017. [Google Scholar] [CrossRef]
- Støy, K.; Brandt, D.; Christensen, J.D. Self-Reconfigurable Robots: An Introduction; MIT Press: Cambridge, MA, USA, 2010. [Google Scholar]
- Zhang, W.J.; Lin, Y. On the principle of design of resilient systems—Application to enterprise information systems. Enterp. Inf. Syst. 2010, 4, 99–110. [Google Scholar] [CrossRef]
- Holling, C.S. Resilience and stability of ecological systems. Ann. Rev. Ecol. Syst. 1973, 4, 1–23. [Google Scholar] [CrossRef]
- Hollnagel, E.; Woods, D.D.; Leveson, N. Resilience Engineering Concepts and Precepts; Ashgate Publishing, Ltd.: Farnham, UK, 2006. [Google Scholar]
- Patternson, E.S.; Woods, D.D.; Cook, R.I.; Render, M.L. Collaborative cross-checking to enhance resilience. Cognit. Technol. Work 2007, 9, 155–162. [Google Scholar] [CrossRef]
- Bursztein, E.; Goubault-Larrecq, J. A logical framework for evaluating network resilience against fault and attacks. In Lecture Notes in Computer Science; Hutchison, D., Kanade, T., Kittler, J., Kleinberg, J.M., Mattern, F., Mitchell, J.C., Naor, M., Pandu Rangan, C., Steffen, B., Terzopoulos, D., et al., Eds.; Springer: Cham, Switzerland, 2007; Volume 4846, pp. 212–227. [Google Scholar]
- Kumar, V.; Cotran, R.S.; Robbins, S.L. Basic Pathology; Saunders: Philadelphia, PA, USA, 1992. [Google Scholar]
- Madden, J.D. Mobile Robots: Motor challenges and material solutions. Science 2007, 318, 1094–1097. [Google Scholar] [CrossRef] [PubMed]
- Geekologie (19 September 2013). Available online: http://geekologie.com/2013/09/self-healing-robot-skin-grows-back-toget.php (accessed on 12 March 2014).
- Avižienis, A.; Laprie, J.; Randell, B.; Landwehr, C. Basic Concepts and Taxonomy of Dependable and Secure Computing. IEEE Trans. Dependable Secur. Comput. 2004, 1, 11–33. [Google Scholar] [CrossRef]
- Merriam-Webster Inc. Merriam-Webster’s Collegiate Dictionary; Merriam-Webster: Springfield, MA, USA, 2004. [Google Scholar]
- Zykov, V.; Mytilinaios, E.; Desnoyer, M.; Lipson, H. Evolved and designed self-reproducing modular robotics. IEEE Trans. Robot. 2007, 23, 308–319. [Google Scholar] [CrossRef]
- Kitano, H. Biological robustness. Nat. Rev. Genet. 2004, 5, 826–837. [Google Scholar] [CrossRef] [PubMed]
- Verma, A.K.; Ajit, S.; Karanki, D.R. Reliability and Safety Engineering; Springer: London, UK, 2010. [Google Scholar]
- Bischoff, R.; Graefe, V. HERMES—An Intelligent Humanoid Robot Designed and Tested for Dependability. In Experimental Robotics VIII; Siciliano, B., Dario, P., Eds.; Springer: Berlin/Heidelberg, Geymany, 2003; pp. 64–74. [Google Scholar]
- Zhang, W.J.; Lin, Y.; Sinha, N. On the function-behavior-structure model for design. In Proceedings of the 2nd Canadian Design Engineering Network Conference, Kaninaskis, AB, Canada, 18–20 July 2005. [Google Scholar]
- Lin, Y.; Zhang, W.J. Towards a novel interface design framework: Function-behavior-state paradigm. Int. J. Hum. Comput. Stud. 2004, 61, 259–297. [Google Scholar] [CrossRef]
- Støy, K.; Nagpal, R. Self-repair through scale independent self-reconfiguration. In Proceedings of the IEEE/RSJ International Conference on Robots and Systems, Sendai, Japan, 28 September–2 October 2004; pp. 2062–2067. [Google Scholar]
- Sun, Z.H.; Yang, G.S.; Zhang, B.; Zhang, W.J. On the Concept of the Resilient Machine. In Proceedings of the IEEE International Conference on Industrial Electronics and Application, Beijing, China, 21–23 June 2011; pp. 357–360. [Google Scholar]
- Zhang, W.J.; van Luttervelt, C.A. Toward a resilient manufacturing system. Ann. CIRP 2011, 60, 469–472. [Google Scholar] [CrossRef]
- Bongard, J.; Zykov, V.; Lipson, H. Resilient machines through continuous self-modeling. Science 2006, 314, 1118–1121. [Google Scholar] [CrossRef] [PubMed]
- Mahdavi, S.H.; Bentley, P.J. Innately adaptive robotics through embodied evolution. Auton. Robot. 2006, 20, 149–163. [Google Scholar] [CrossRef]
- Berenson, D.; Estevez, N.; Lipson, H. Hardware evolution of analog circuits for in-situ robotic fault-recovery. In Proceedings of the IEEE NASA/DoD Conference on Evolvable Hardware, Washington, DC, USA, 29 June–1 July 2005; pp. 12–19. [Google Scholar]
- Nguyen-Tuong, D.; Peters, J. Model Learning for Robot Control: A Survey. Cognit. Process. 2011, 12, 319–340. [Google Scholar] [CrossRef] [PubMed]
- Kober, J.; Peters, J. Reinforcement learning in robotics: A survey. Int. J. Robot. Res. 2013, 32, 1238–1274. [Google Scholar] [CrossRef]
- Sproewitz, A.; Moeckel, R.; Maye, J.; Ijspeert, A. Learning to move in modular robots using central pattern generators and online optimization. Int. J. Robot. Res. 2008, 27, 423–443. [Google Scholar] [CrossRef]
- Christensen, D.J.; Larsen, J.C.; Stoy, K. Fault-tolerant gait learning and morphology optimization of a polymorphic walking robot. Evol. Syst. 2014, 5, 21–32. [Google Scholar] [CrossRef]
- Mostafa, K.; Tsai, C.S.; Her, I. Alternative gaits for multiped robots with leg failures to retain maneuverability. Int. J. Adv. Robot. Syst. 2010, 7, 33–40. [Google Scholar] [CrossRef]
- Erden, M.S.; Leblebicioğlu, K. Free gait generation with reinforcement learning for a six-legged robot. Robot. Auton. Syst. 2008, 56, 199–212. [Google Scholar] [CrossRef]
- Peters, J.; Schaal, S. Reinforcement learning of motor skills with policy gradients. Neural Netw. 2008, 21, 682–697. [Google Scholar] [CrossRef] [PubMed]
- Koos, S.; Cully, A.; Mouret, J.B. Fast damage recovery in robotics with the T-resilience algorithm. Int. J. Robot. Res. 2013, 32, 1700–1723. [Google Scholar] [CrossRef]
- Faına, A.; Bellas, F.; Lopez-Pena, F.; Duro, R.J. EDHMoR: Evolutionary designer of heterogeneous modular robots. Eng. Appl. Artif. Intell. 2013, 26, 2408–2423. [Google Scholar] [CrossRef]
- Faına, A.; Bellas, F.; Orjales, F.; Souto, D.; Duro, R.J. An evolution friendly modular architecture to produce feasible robots. Robot. Auton. Syst. 2015, 63, 195–205. [Google Scholar] [CrossRef]
- Suh, J.W.; Homans, S.B.; Yim, M. Telecubes: Mechanical design of a module for self-reconfigurable robotics. In Proceedings of the IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; pp. 4095–4101. [Google Scholar]
- Yim, M.; Shen, W.M.; Salemi, B.; Rus, D.; Moll, M.; Lipson, H. Modular self-reconfigurable robot systems—Challenges and opportunities for the future. IEEE Robot. Autom. Mag. 2007, 14, 43–52. [Google Scholar] [CrossRef]
- Murata, S.; Yoshida, E.; Kamimura, A.; Kurokawa, H.; Tomita, K.; Kokaji, S. M-TRAN: Self-reconfigurable modular robotic system. IEEE/ASME Trans. Mechatron. 2002, 7, 431–441. [Google Scholar] [CrossRef]
- Garcia, R.; Stoy, K. The Odin Modular Robot: Electronics and Communication. Master’s Thesis, The Maersk Mc-Kinney Moller Institute, University of Southern Denmark, Odense, Denmark, 2008. [Google Scholar]
- Ünsal, C.; Kiliççöte, H.; Khosla, P.K. A modular self-reconfigurable bipartite robotic system: Implementation and motion planning. Auton. Robot. 2001, 10, 23–40. [Google Scholar] [CrossRef]
- Yu, C.H.; Haller, K.; Ingber, D.; Nagpal, R. Morpho: A self-deformable modular robot inspired by cellular structure. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 3571–3578. [Google Scholar]
- Zhang, T.; Zhang, D.; Gupta, M.M.; Zhang, W.J. Design of a General Resilient Robotic System Based on Axiomatic Design Theory. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics, Pusan, Korea, 7–11 July 2015; pp. 71–78. [Google Scholar]
- Castano, A.; Shen, W.M.; Will, P. CONRO: Towards Deployable Robots with Inter-Robots Metamorphic Capabilities. Auton. Robot. 2000, 8, 309–324. [Google Scholar] [CrossRef]
- Rus, D.; Vona, M. Crystalline robots: Self-reconfiguration with compressible unit modules. Auton. Robot. 2001, 10, 107–124. [Google Scholar] [CrossRef]
- Davey, J.; Kwok, N.; Yim, M. Emulating self-reconfigurable robots-design of the SMORES system. In Proceedings of the IEEE/RSJ International Conference on Robots and Systems, Vilamoura, Algarve, Portugal, 7–12 October 2012; pp. 4464–4469. [Google Scholar]
- Zhang, T.; Liu, C.L.; Qian, Z.Q.; Zhang, D.; Gupta, M.M.; Zhang, W.J. Configuration Synthesis of Underactuated Resilient Robotic Systems. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics, Besançon, France, 7–11 July 2014; pp. 721–726. [Google Scholar]
- Rus, D.; Vona, M. Self-reconfiguration planning with compressible unit modules. In Proceedings of the IEEE International Conference on Robotics and Automation, Detroit, MI, USA, 10–15 May 1999; pp. 2513–2520. [Google Scholar]
- Bojinov, H.; Casal, A.; Hogg, T. Multiagent control of self-reconfigurable robots. Artif. Intell. 2000, 142, 99–120. [Google Scholar] [CrossRef]
- Stoy, K. Controlling self-reconfiguration using cellular automata and gradients. In Proceedings of the 8th International Conference on Intelligent Autonomous Systems, Amsterdam, The Netherlands, 11–14 December 2004; pp. 693–702. [Google Scholar]
- McNew, J.M.; Klavins, E. Locally interacting hybrid systems with embedded graph grammars. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 6080–6087. [Google Scholar]
- Pamecha, A.; Ebert-Uphoff, I.; Chirikjian, G.S. Useful Metrics for Modular Robot Motion Planning. IEEE Trans. Robot. Autom. 1997, 13, 531–545. [Google Scholar] [CrossRef]
- Larkworthy, T.; Ramamoorthy, S. An efficient algorithm for self-reconfiguration planning in a modular robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 5139–5146. [Google Scholar]
- McNew, J.M.; Klavins, E. Non-deterministic reconfiguration of tree formations. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 690–697. [Google Scholar]
- Casal, A.; Yim, M. Self-Reconfiguration planning for a class of modular robots. In Proceedings of the SPIE Sensor Fusion and Decentralized Control in Robotic Systems II, Boston, MA, USA, 19 September 1999. [Google Scholar]
- Shen, W.M.; Salemi, B.; Will, P. Hormone-inspired adaptive communication and distributed control for CONRO self-reconfigurable robots. IEEE Trans. Robot. Autom. 2002, 18, 700–712. [Google Scholar] [CrossRef]
- Hou, F.L. Self-Reconfiguration Planning for Modular Robots. Ph.D. Thesis, Department of Computer Science, University of Southern California, Los Angeles, CA, USA, 2011. [Google Scholar]
- Butler, Z.; Kotay, K.; Rus, D.; Tomita, K. Cellular automata for decentralized control of self-reconfigurable robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Seoul, Korea, 21–26 May 2001. [Google Scholar]
- Ostergaard, E.H.; Lund, H.H. Distributed cluster walk for the ATRON self-reconfigurable robot. Intell. Auton. Syst. 2004, 8, 291–298. [Google Scholar]
- Østergaard, E.H. Efficient distributed “hormone” graph gradients. In Proceedings of the 19th International joInt Conference on Artificial Intelligence, Edinburgh, UK, 30 July–5 August 2005; pp. 1489–1494. [Google Scholar]
- Zhang, T. Towards a Novel Resilient Robotic System. Ph.D. Thesis, Department of Mechanical Engineering, University of Saskatchewan, Saskatoon, SK, Canada, 2015. [Google Scholar]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Rusu, A.A.; Veness, J.; Bellemare, M.G.; Graves, A.; Riedmiller, M.; Fidjeland, A.K.; Ostrovski, G.; et al. Human-level control through deep reinforcement learning. Nature 2015, 518, 529–533. [Google Scholar] [CrossRef] [PubMed]
- Levine, S.; Finn, C.; Darrell, T.; Abbeel, P. End-to-end training of deep visuomotor policies. J. Mach. Learn. Res. 2016, 17, 1334–1373. [Google Scholar]
- Katyal, K.D.; Staley, E.W.; Johannes, M.S.; Wang, I.J.; Reiter, A.; Burlina, P. In-Hand Robotic Manipulation via Deep Reinforcement Learning. In Proceedings of the Workshop on Deep Learning for Action and Interaction, in Conjunction with Annual Conference on Neural Information Processing Systems, Barcelona, Spain, 9 December 2016. [Google Scholar]
- Trivedi, D.; Rahn, C.; Kier, W.; Walker, I. Soft robotics: Biological inspiration, state of the art, and future research. Appl. Bionics Biomech. 2008, 5, 99–117. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed]
- Caluwaerts, K.; Despraz, J.; Işçen, A.; Sabelhaus, A.P.; Bruce, J.; Schrauwen, B.; SunSpiral, V. Design and control of compliant tensegrity robots through simulation and hardware validation. J. R. Soc. Interface 2014, 11. [Google Scholar] [CrossRef] [PubMed]
- Bruce, J.; Caluwaerts, K.; Iscen, A.; Sabelhaus, A.; SunSpiral, V. Design and evolution of a modular tensegrity robot platform. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 3483–3489. [Google Scholar]
- Wehner, M.; Truby, R.L.; Fitzgerald, D.J.; Mosadegh, B.; Whitesides, G.M.; Lewis, J.A.; Wood, R.J. An integrated design and fabrication strategy for entirely soft, autonomous robots. Nature 2016, 536, 451–455. [Google Scholar] [CrossRef] [PubMed]
- Van Kessel, P. Path to Cyber Resilience: Sense, Resist, React. EY’s 19th Global Information Security Survey 2016–17. Available online: http://www.ey.com/Publication/vwLUAssets/ey-global-information-security-survey-2016-pdf/%24FILE/GISS_2016_Report_Final.pdf (accessed on 15 September 2017).
- Saulnier, K.; Saldaña, D.; Prorok, A.; Pappas, G.J.; Kumar, V. Resilient Flocking for Mobile Robot Teams. IEEE Robot. Autom. Lett. 2017, 2, 1039–1046. [Google Scholar] [CrossRef]





© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, T.; Zhang, W.; Gupta, M.M. Resilient Robots: Concept, Review, and Future Directions. Robotics 2017, 6, 22. https://doi.org/10.3390/robotics6040022
Zhang T, Zhang W, Gupta MM. Resilient Robots: Concept, Review, and Future Directions. Robotics. 2017; 6(4):22. https://doi.org/10.3390/robotics6040022
Chicago/Turabian StyleZhang, Tan, Wenjun Zhang, and Madan M. Gupta. 2017. "Resilient Robots: Concept, Review, and Future Directions" Robotics 6, no. 4: 22. https://doi.org/10.3390/robotics6040022
APA StyleZhang, T., Zhang, W., & Gupta, M. M. (2017). Resilient Robots: Concept, Review, and Future Directions. Robotics, 6(4), 22. https://doi.org/10.3390/robotics6040022