
Suitable Method for Improving Friction Performance of Magnetic Wheels with Metal Yokes †

Abstract
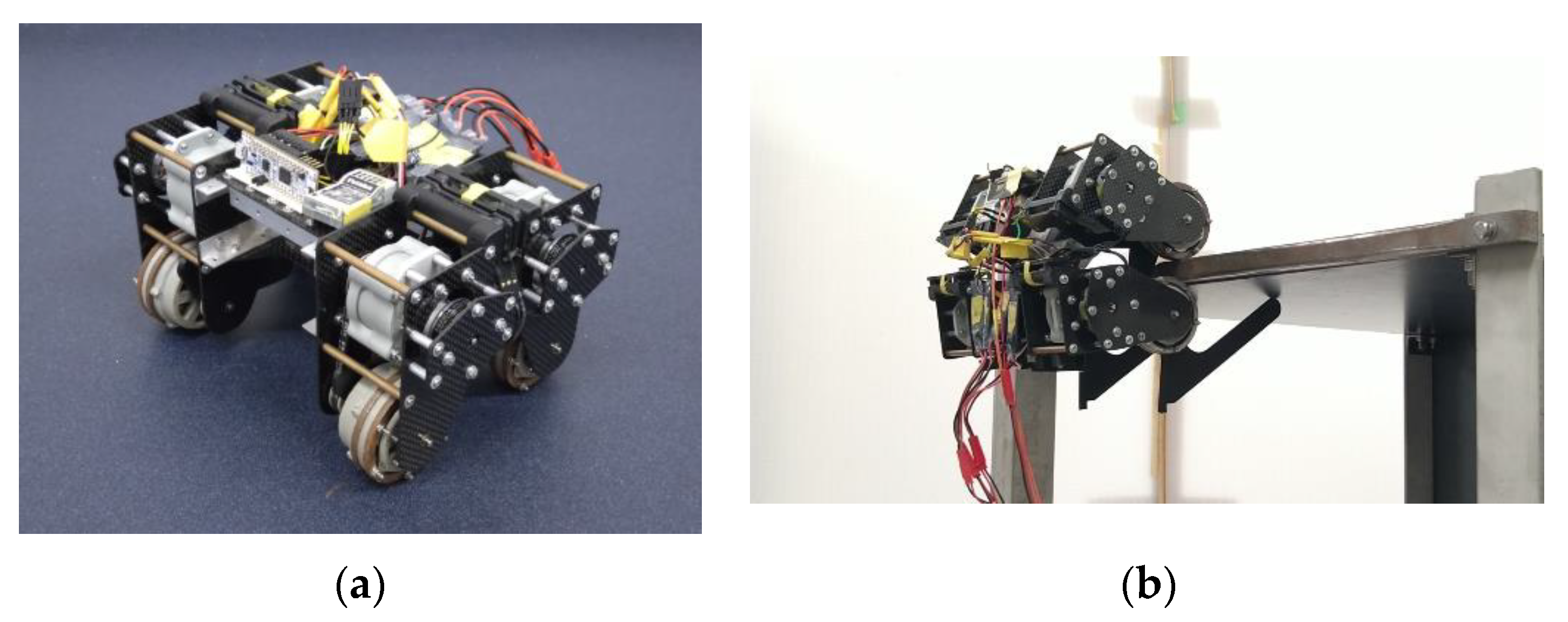
1. Introduction
2. Experiments
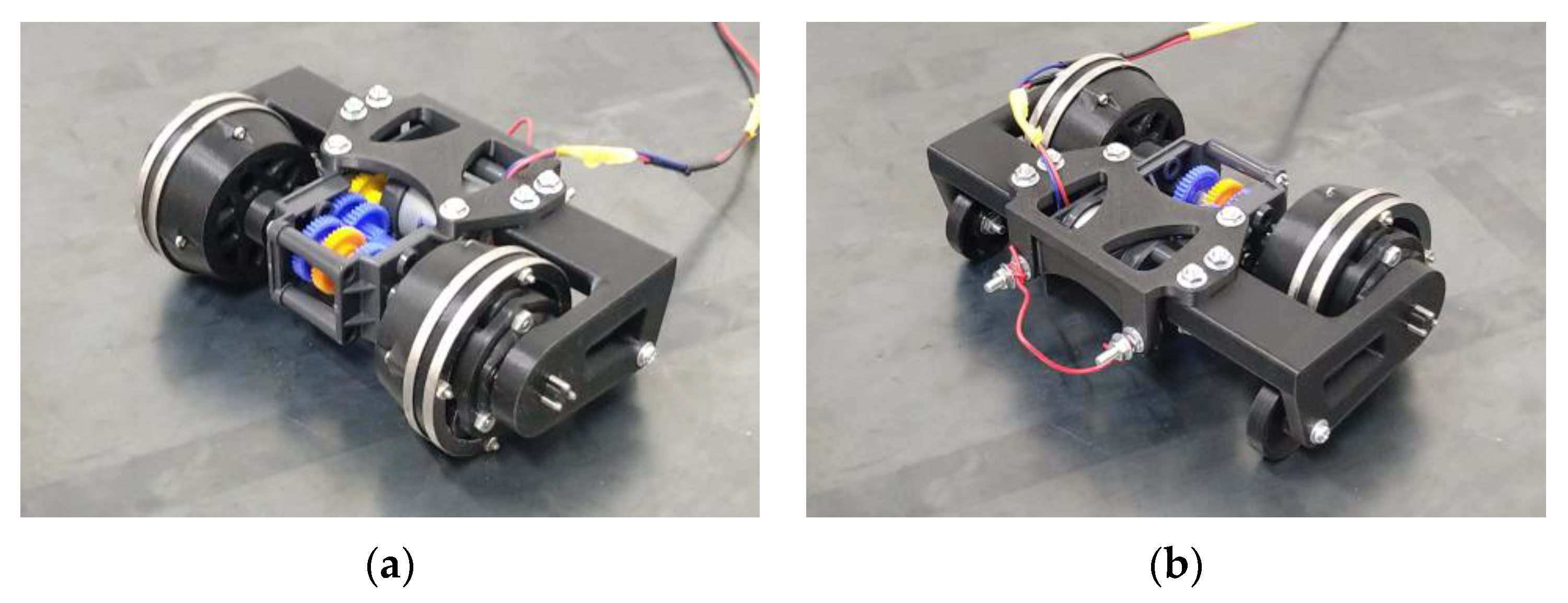
2.1. PGMWs for the Experiments
2.2. Types of the Yokes
- (A)
- Yokes with no processing
- (B)
- Yokes with rubber tires
- (C)
- Yokes with axial grooves on the surface
- (D)
- Yokes with a gritty surface
- (E)
- Yokes with corroded surfaces by sodium chloride solution
2.3. Roughness of Yokes
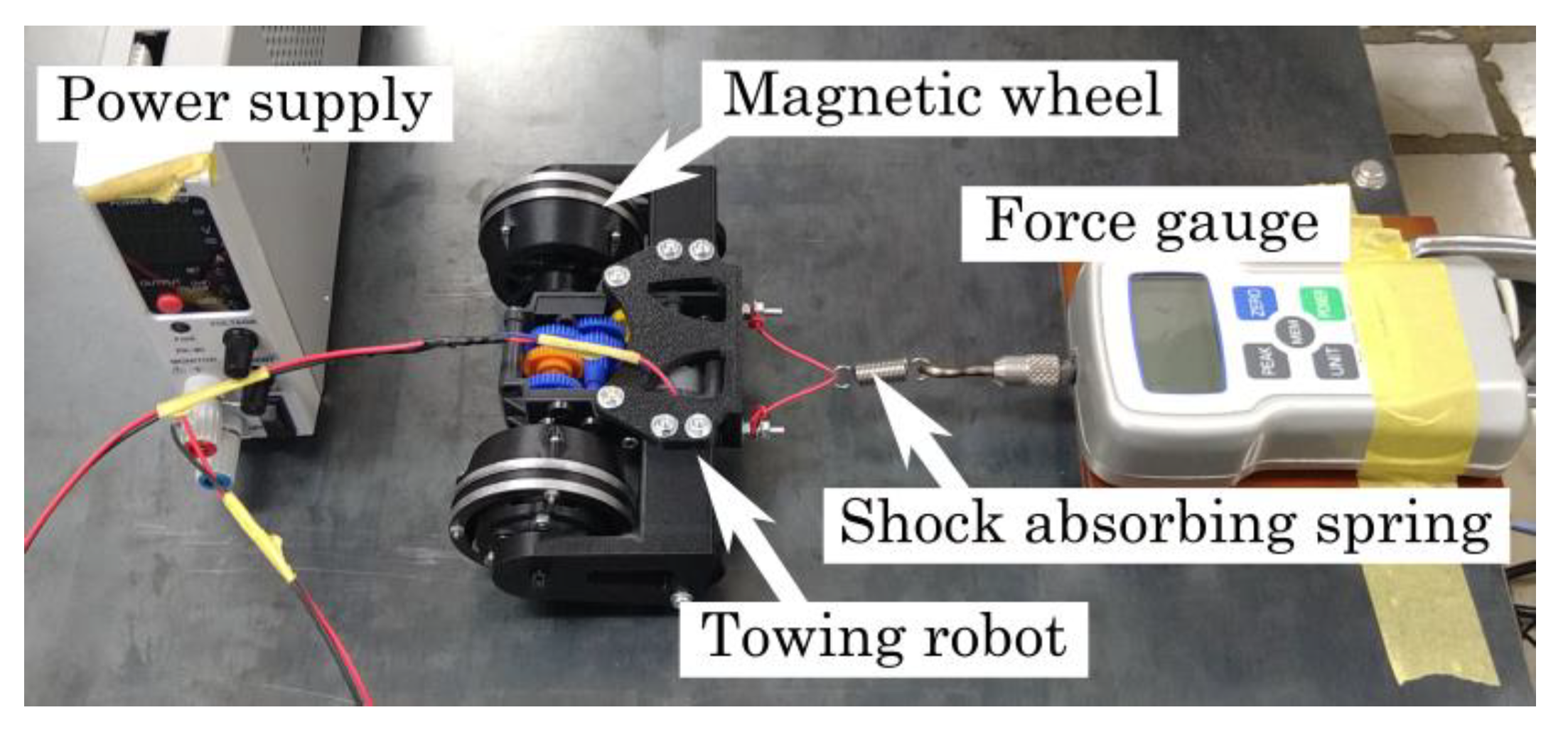
2.4. Experimental Apparatus
2.5. Experimental Procedures
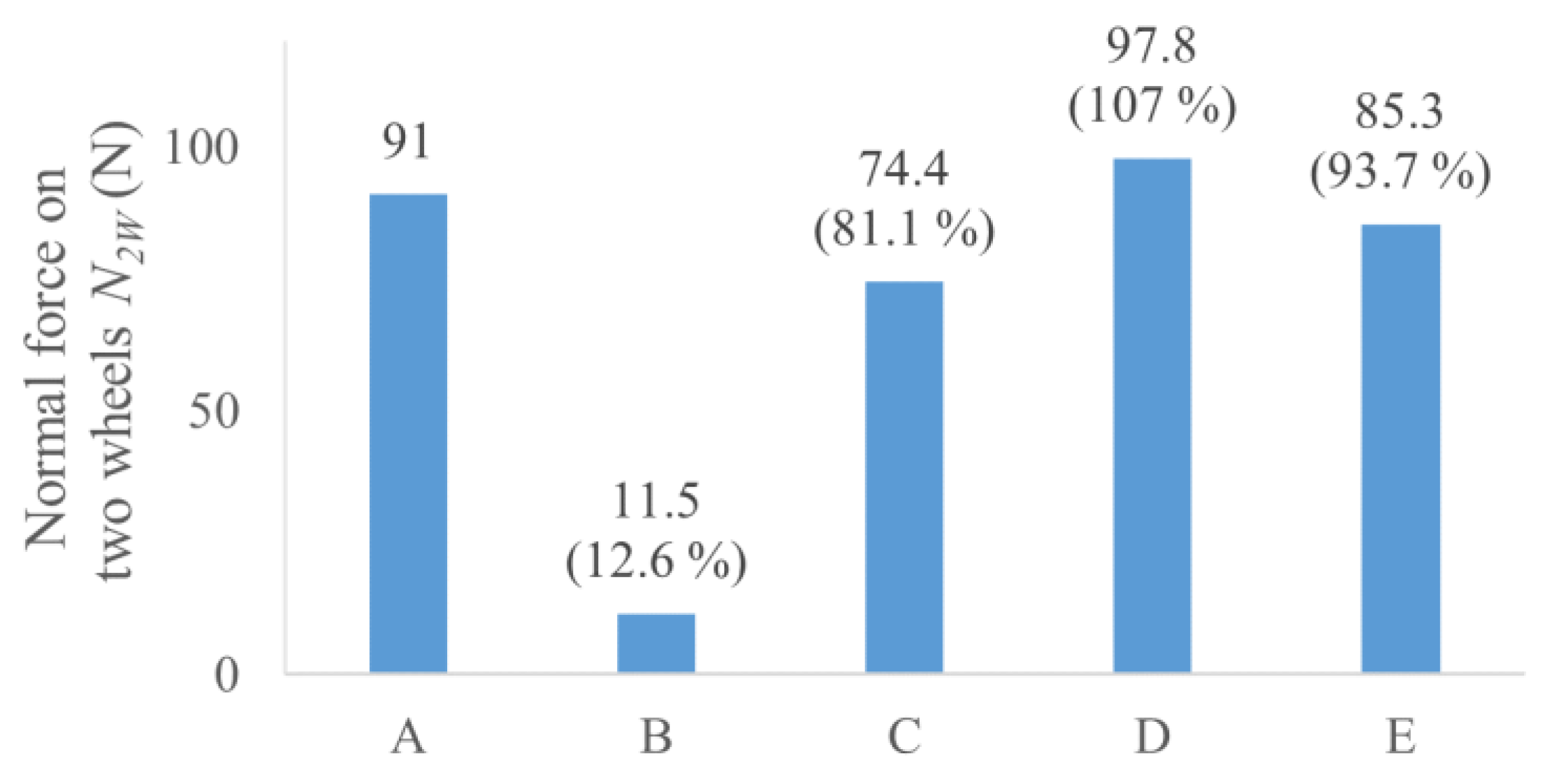
- The load on the front two wheels is measured according to the mass of the robot. The average of the three time measurements is used as the results.
- The attractive force of one wheel with the magnets is measured. When the wheel attached to the steel structure is pulled up quietly in a vertical direction, the maximum force required for it to be pulled off the structure is the magnetic attractive force of the wheel. The average of the ten time measurements with the force gauge is used as the results.
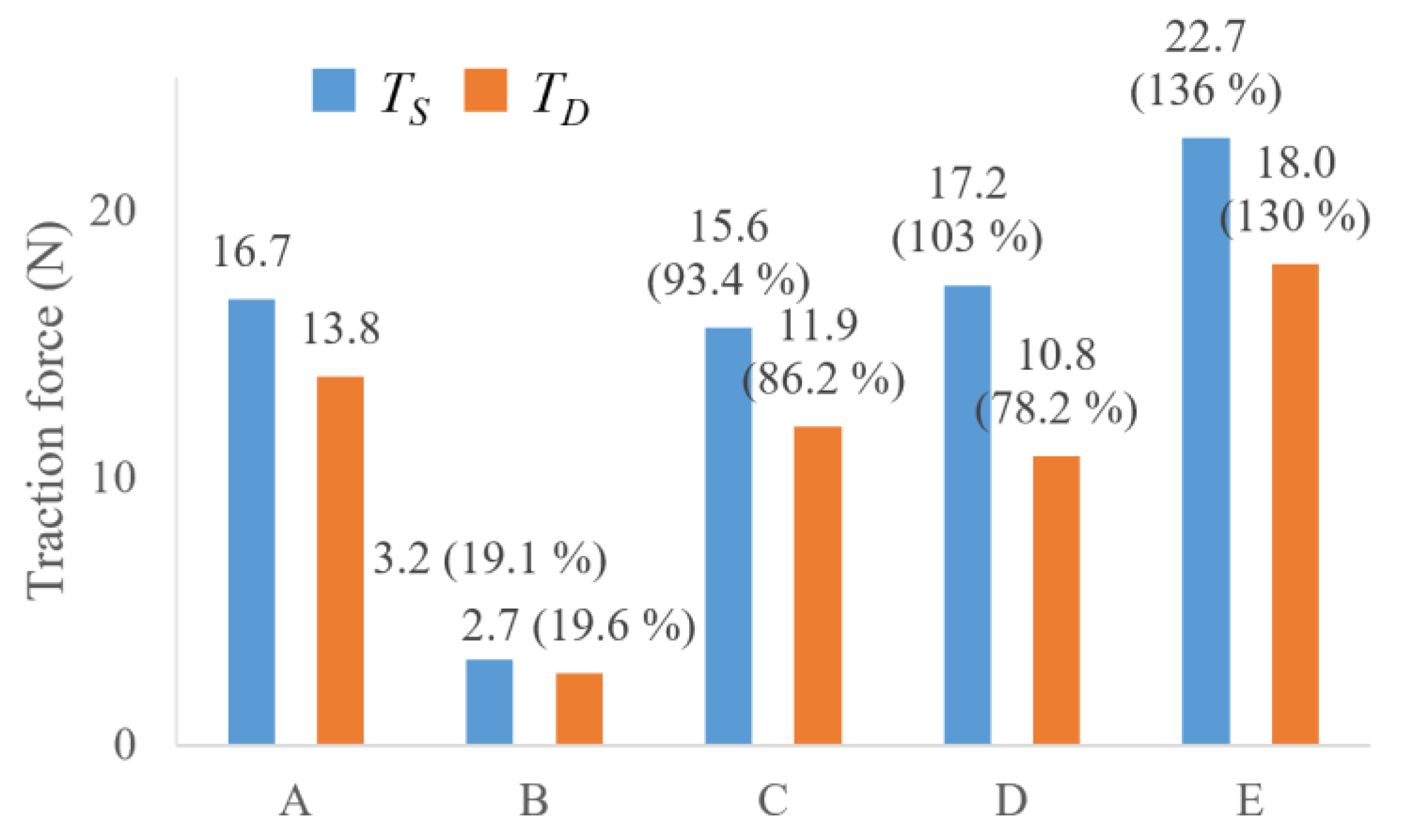
- The robot starts driving from a position in which the spring is loose. Eventually, the spring is stretched, and the robot cannot move forward due to the wheels slipping. The maximum traction force is taken as the “static traction force”. The average of the three time measurements is used as the results.
- The robot is directly connected to a force gauge without the spring. The traction force when the robot is driving with slipping the wheels for about 10 s is taken as “the dynamic traction force”. The average of the three time measurements is taken as the result.
- As shown above, Steps 1 to 4 are carried out with different types of yokes and with and without magnets. Afterward, all of the results are compared.
3. Results
3.1. Yoke A
3.2. Yoke B to E without the Magnets
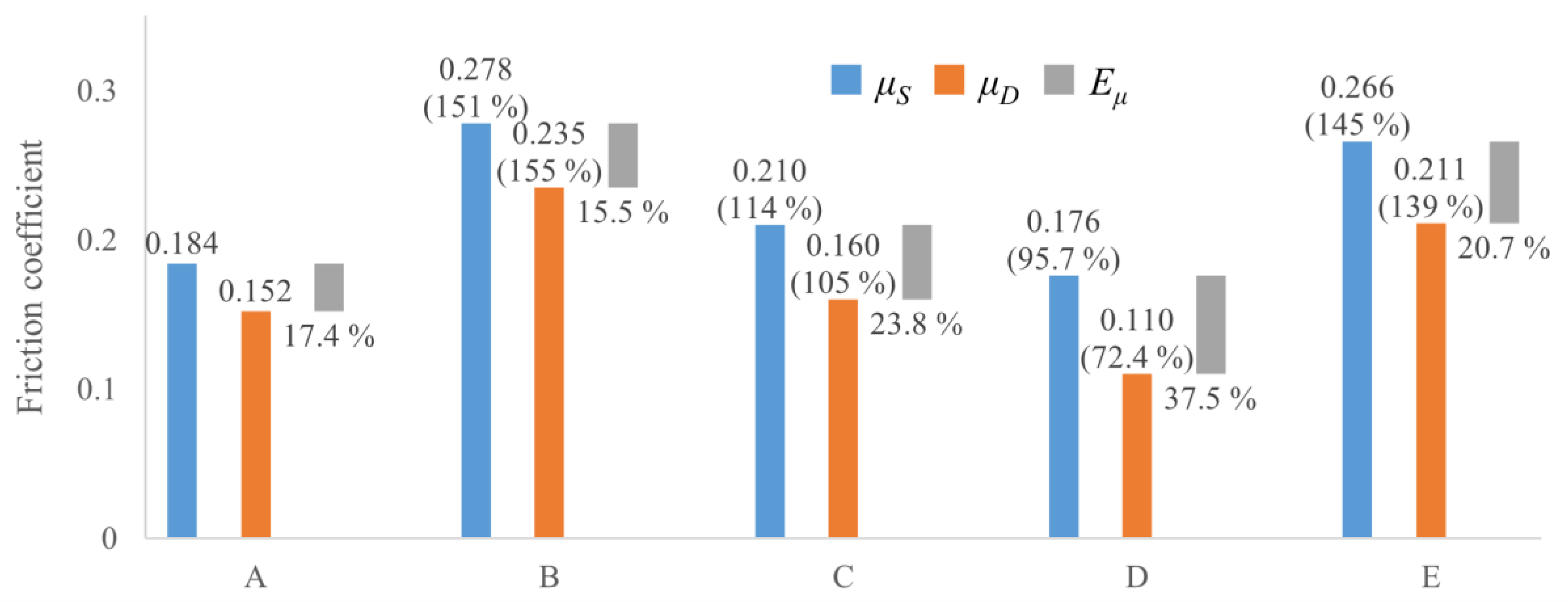
3.3. Yoke B to E with the Magnets
4. Consideration
4.1. Yokes with Rubber Tires
4.2. Yokes with Irregularity on the Surface
4.3. Yokes with Corroded Surfaces
5. Conclusions
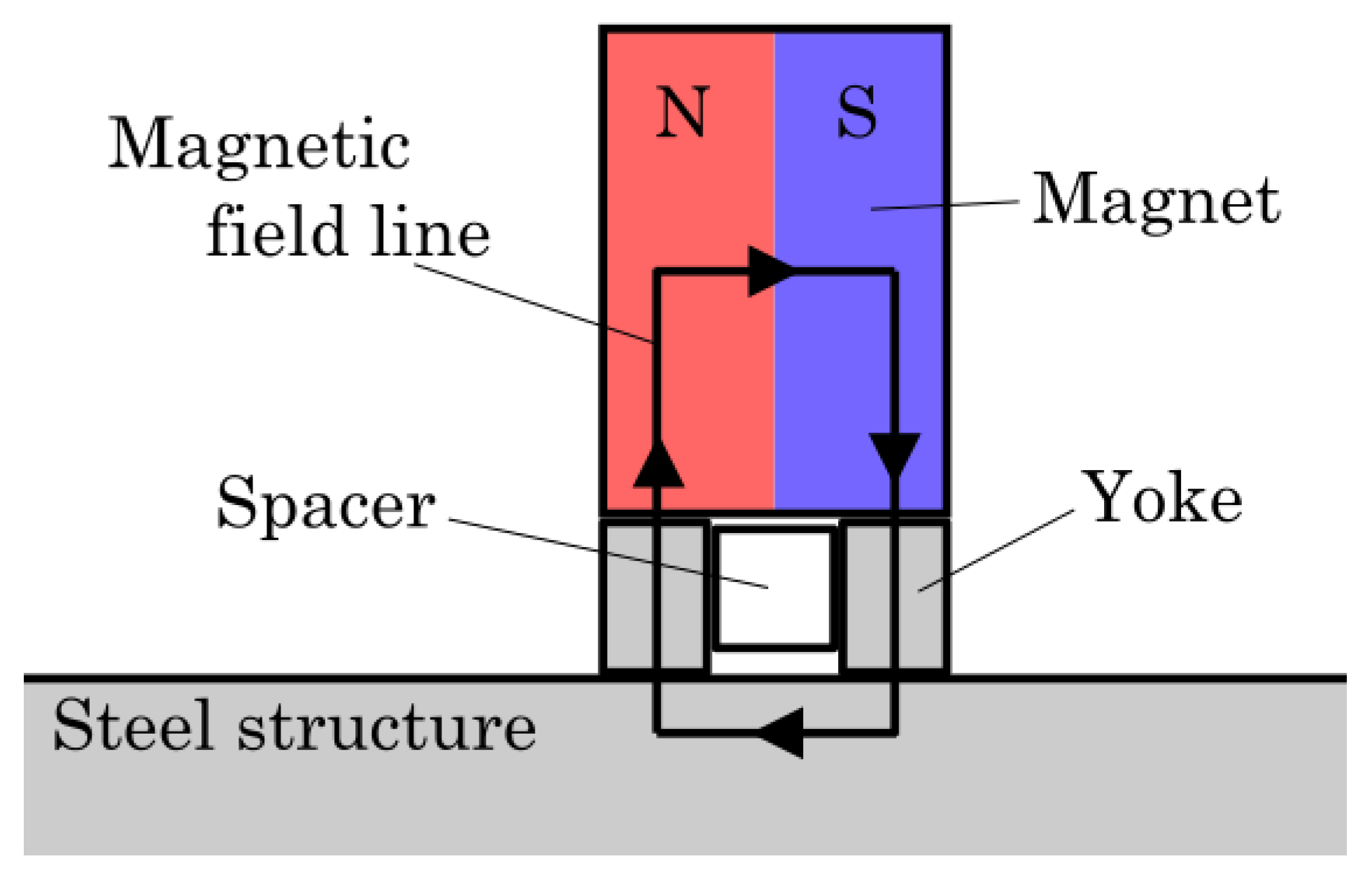
- The PGMWs tend to reduce the attractive force more than standard magnetic wheels when a non-magnetic material is between the yoke and the running surface. Therefore, designs that cover the yoke with rubber tires are not suitable for the PGMWs.
- Rough irregularities of the yoke can improve the friction coefficient, but it reduces the attractive force.
- Fine irregularities on the yoke do not reduce (or can improve) the attractive force. However, it is difficult to keep improving the friction coefficient. This is because the fine irregularities are scraped off by slipping.
- Yoke E, which was corroded by sodium chloride solution, can improve the friction coefficient without a reduction in attractive force.
- The reason why Yoke E did not impair the attractive force is because the rust layer is very thin and contains the ferromagnetic Fe3O4. However, the influence of the former is thought to be more dominant than the latter.
- The main reason why Yoke E’s improved friction coefficient is thought to be that the rust layer has moderate irregularities on the surface and is not easily scraped off.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hao, S. I-35W Bridge Collapse. J. Bridge Eng. 2010, 15, 608–614. [Google Scholar] [CrossRef]
- Salem, H.M.; Hemley, H.M. Numerical investigation of collapse of the Minnesota I-35 bridge. Eng. Struct. 2014, 59, 635–645. [Google Scholar] [CrossRef]
- Ham, Y.; Han, K.K.; Lin, J.J.; Golparvar-Fard, M. Visual monitoring of civil infrastructure systems via camera-equipped Unmanned Aerial Vehicles (UAVs): A review of related works. Vis. Eng. 2016, 4, 1. [Google Scholar] [CrossRef]
- Almadhoun, R.; Taha, T.; Seneviratne, L.; Dias, J.; Cai, G. A survey on inspecting structures using robotic systems. Int. J. Adv. Robot. Syst. 2016, 13, 6. [Google Scholar] [CrossRef]
- Halder, S.; Afsari, K. Robots in Inspection and Monitoring of Buildings and Infrastructure: A Systematic Review. Appl. Sci. 2023, 13, 2304. [Google Scholar] [CrossRef]
- Hajjaj, S.S.H.; Khalid, I.B. Design and Development of an Inspection Robot for Oil and Gas Applications. Int. J. Eng. Technol. 2018, 7, 5–10. [Google Scholar] [CrossRef]
- Wang, R.; Kawahara, Y. An Automated Sensing System for Steel Bridge Inspection Using GMR Sensor Array and Magnetic Wheels of Climbing Robot. J. Sens. 2016, 2016, 16. [Google Scholar] [CrossRef]
- Nguyen, S.T.; Nguyen, H.; Bui, S.T.; Ho, V.A.; Ngo, T.D.; La, H.M. An Agile Bicycle-like Robot for Complex Steel Structure Inspection. In Proceedings of the International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 157–163. [Google Scholar] [CrossRef]
- Noh, M.; Kwon, E.; Park, S.H.; Park, Y.W. Modeling of Attractive Force by Magnetic Wheel Used for Mobile Robot. Actuators 2020, 9, 67. [Google Scholar] [CrossRef]
- Zhu, J.; Zhu, Y.; Zhang, P. Review of Advancements in Wall Climbing Robot Techniques. Frankl. Open 2024, 8, 100148. [Google Scholar] [CrossRef]
- Tanida, M.; Ono, K.; Kobayashi, S.; Shiba, T.; Takada, Y. Study of Magnetic Wheels with Planetary Gears Which Make Running on Flange Paths Easy for Magnetic Wheeled Robot. J. Robot. Soc. Jpn. 2024, 42, 64–73. [Google Scholar] [CrossRef]
- Tanida, M.; Ono, K.; Shiba, T.; Takada, Y. Necessary Conditions for Running through a Flange by Using Planetary-Geared Magnetic Wheels. Robotics 2024, 13, 72. [Google Scholar] [CrossRef]
- Bisht, R.S.; Pathak, P.M.; Panigrahi, S.K. Experimental investigations on permanent magnet based wheel mechanism for safe navigation of climbing robot. Procedia Comput. Sci. 2018, 133, 377–384. [Google Scholar] [CrossRef]
- Skipper, W.A.; Chalsey, A.; Lewis, R. A review of railway sanding system research: Adhesion restoration and leaf layer removal. Tribol. Mater. Surf. Interfaces 2018, 12, 237–251. [Google Scholar] [CrossRef]
- Hanada, K.; Ikeuchi, K.; Saga, S. Development of Improved Wheel Friction Block with Integrated Flange Lubrication and Tread Adhesion Functions. Q. Rep. RTRI 2021, 62, 197–200. [Google Scholar] [CrossRef]
- Spiryagin, M.; Sun, Y.Q.; Cole, C.; Simson, S.; Persson, I. Ingemar PERSSON, Development of Traction Control for Hauling Locomotives. J. Syst. Des. Dyn. 2011, 5, 1214–1225. [Google Scholar] [CrossRef]
- Revie, R.W.; Uhlig, H.H. Corrosion and Corrosion Control; John Wiley & Sons: Hoboken, NJ, USA, 2008; p. 132. [Google Scholar] [CrossRef]
- Katori, K.; Okakura, T.; Yamamoto, K. Study on Surface od Casting (II). J. Jpn. Foundrymen’s Soc. 1949, 21, 1–8. [Google Scholar] [CrossRef]
- Magel, E.E. A Survey of Wheel/Rail Friction; Federal Railroad Administration: Washington, DC, USA, 2017.
- Tâche, F.; Fischer, W.; Caprari, G.; Siegwart, R.; Moser, R.; Mondada, F. Magnebike: A magnetic wheeled robot with high mobility for inspecting complex-shaped structures. J. Field Robot. 2009, 26, 453–476. [Google Scholar] [CrossRef]
- Zhu, Y. The influence of iron oxides on wheel–rail contact: A literature review. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2018, 232, 734–743. [Google Scholar] [CrossRef]
- Xu, W.; Zhang, B.; Deng, Y.; Wang, Z.; Jiang, Q.; Yang, L.; Zhang, J. Corrosion of rail tracks and their protection. Corros. Rev. 2021, 39, 1–13. [Google Scholar] [CrossRef]
- Ministry of Land, Infrastructure, Transport and Tourism. Standard Specifications for Public Building Works (Building Construction). Available online: https://www.mlit.go.jp/common/001473539.pdf (accessed on 22 August 2024).
- Ban, T. Phenomena caused by substances intervening between the wheel and the rail. RRR 2008, 65, 10–13. [Google Scholar]
- Misawa, T. Corrosion Morphologies and Products of Iron and Steels in Wet Corrosion. Bull. Jpn. Inst. Met. 1985, 24, 201–210. [Google Scholar] [CrossRef]
- Zhu, Y.; Olofsson, U.; Chen, H. Friction Between Wheel and Rail: A Pin-On-Disc Study of Environmental Conditions and Iron Oxides. Tribol. Lett. 2013, 52, 327–339. [Google Scholar] [CrossRef]
- Nakahara, T.; Baek, K.S.; Chen, H.; Ishida, M. Relationship between surface oxide layer and transient traction characteristics for two steel rollers under unlubricated and water lubricated conditions. Wear 2011, 271, 25–31. [Google Scholar] [CrossRef]
- Chen, H.; Sone, Y.; Baek, K.S.; Nakahara, T.; Ishida, M. A Fundamental Study on Effect of Rust upon Adhesion Coefficient between Wheel and Rail. Rtri Rep. 2007, 21, 5–10. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Diameter of yokes | 53 mm |
| Inner diameter | 44 mm |
| Thickness of one yoke | 3.2 mm |
| Distance between two yokes | 3.6 mm |
| Shape of magnets | |
| Numbers of magnets | 3 |
| Name | Feature | Mass of a Wheel | Appearance | |
|---|---|---|---|---|
| Without Magnet | With Magnet | |||
| A | Yokes with no processing | 75.3 g | 105.5 g |  |
| B | Yokes with using thin rubber tires | 77.8 g | 107.9 g |  |
| C | Yokes with axial grooves on the surface | 74.6 g | 104.7 g |  |
| D | Yokes with a gritty surface | 75.8 g | 105.8 g |  |
| E | Yokes with corroded surface by sodium chloride solution | 75.9 g | 106.1 g |  |
| Name | Pattern | ||
|---|---|---|---|
| No Adjustment | Adjusted | ||
| A |  |  |  |
| B |  |  |  |
| C |  |  |  |
| D |  |  |  |
| E |  |  |  |
| Name | Load Applied on the Front Two Wheels | Traction Force | |
|---|---|---|---|
| Static | Dynamic | ||
| A | 187.6 g | 0.3 N | 0.3 N |
| B | 187.1 g | 0.6 N | 0.6 N |
| C | 185.3 g | 0.3 N | 0.3 N |
| D | 185.3 g | 0.4 N | 0.3 N |
| E | 186.4 g | 0.6 N | 0.5 N |
| Name | Load Applied on the Front Two Wheels | Attractive Force in One Wheel | Traction Force | |
|---|---|---|---|---|
| Static | Dynamic | |||
| A | 242.7 g | 44.3 N | 16.7 N | 13.8 N |
| B | 255.3 g | 4.5 N | 3.2 N | 2.7 N |
| C | 241.2 g | 36.0 N | 15.6 N | 11.9 N |
| D | 247.2 g | 47.7 N | 17.2 N | 10.8 N |
| E | 255.0 g | 41.4 N | 22.7 N | 18.0 N |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tanida, M.; Ono, K.; Shiba, T.; Takada, Y. Suitable Method for Improving Friction Performance of Magnetic Wheels with Metal Yokes. Robotics 2024, 13, 151. https://doi.org/10.3390/robotics13100151
Tanida M, Ono K, Shiba T, Takada Y. Suitable Method for Improving Friction Performance of Magnetic Wheels with Metal Yokes. Robotics. 2024; 13(10):151. https://doi.org/10.3390/robotics13100151
Chicago/Turabian StyleTanida, Masaru, Kosuke Ono, Takehiro Shiba, and Yogo Takada. 2024. "Suitable Method for Improving Friction Performance of Magnetic Wheels with Metal Yokes" Robotics 13, no. 10: 151. https://doi.org/10.3390/robotics13100151
APA StyleTanida, M., Ono, K., Shiba, T., & Takada, Y. (2024). Suitable Method for Improving Friction Performance of Magnetic Wheels with Metal Yokes. Robotics, 13(10), 151. https://doi.org/10.3390/robotics13100151