



Design and Evaluation of an Intuitive Haptic Teleoperation Control System for 6-DoF Industrial Manipulators

Abstract
1. Introduction
Related Work
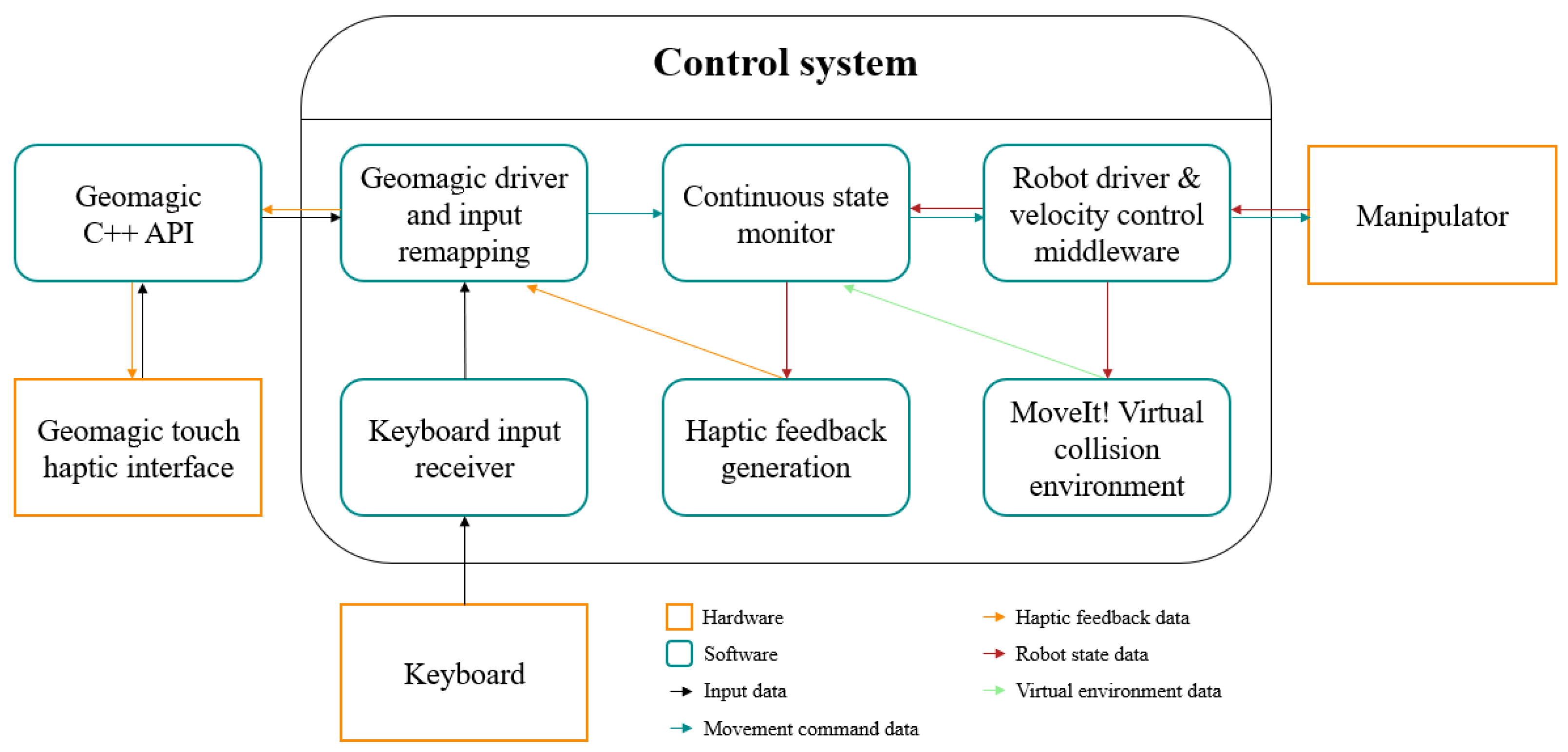
2. Materials and Methods
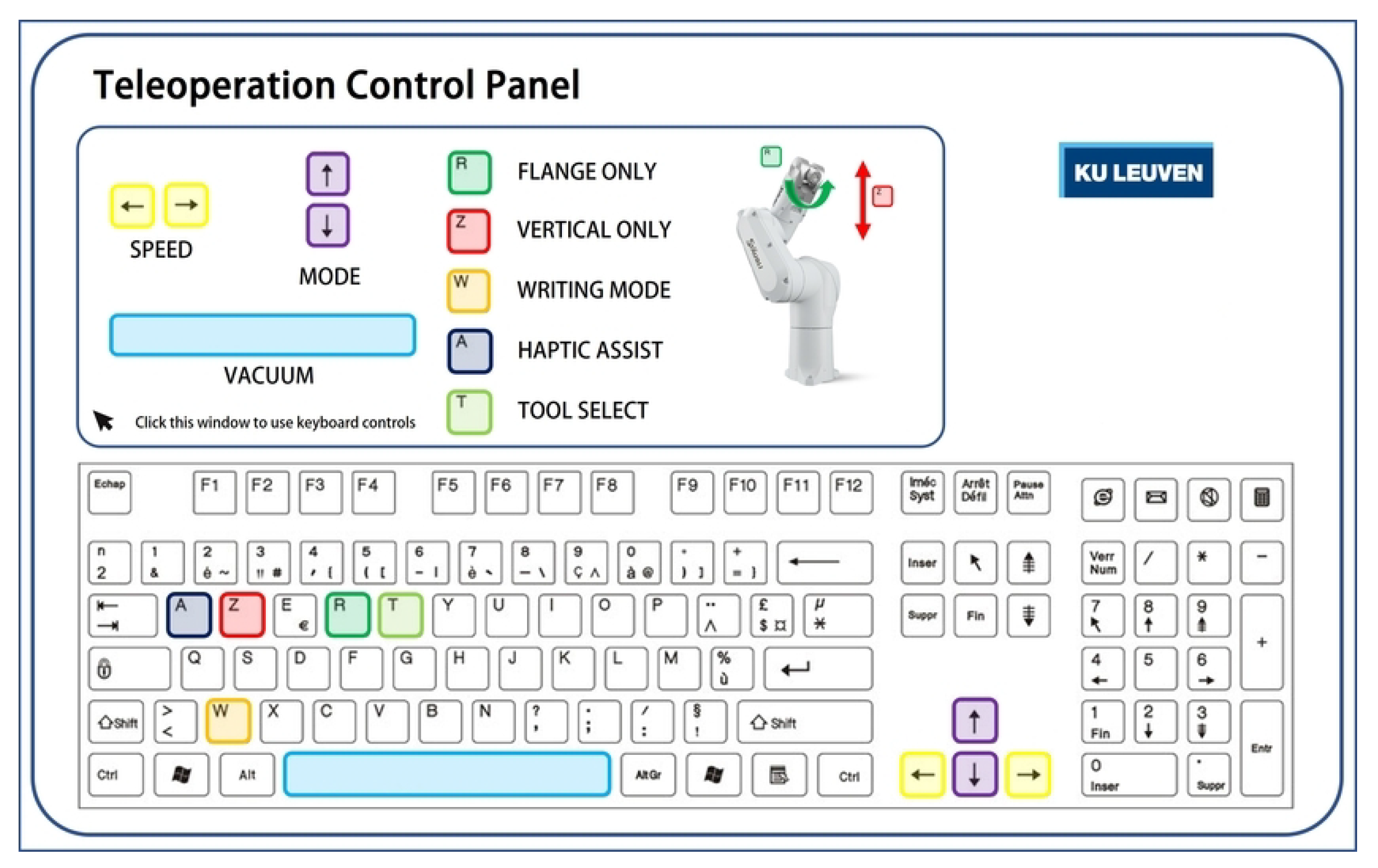
2.1. Interface Input
2.2. Continuous State Monitor
2.2.1. Singularity Prevention
2.2.2. Collision Prevention
2.2.3. Restricted Zones
2.3. Haptic Feedback Generation
3. Results
3.1. Singularity and Collision Prevention
3.2. Intuitiveness
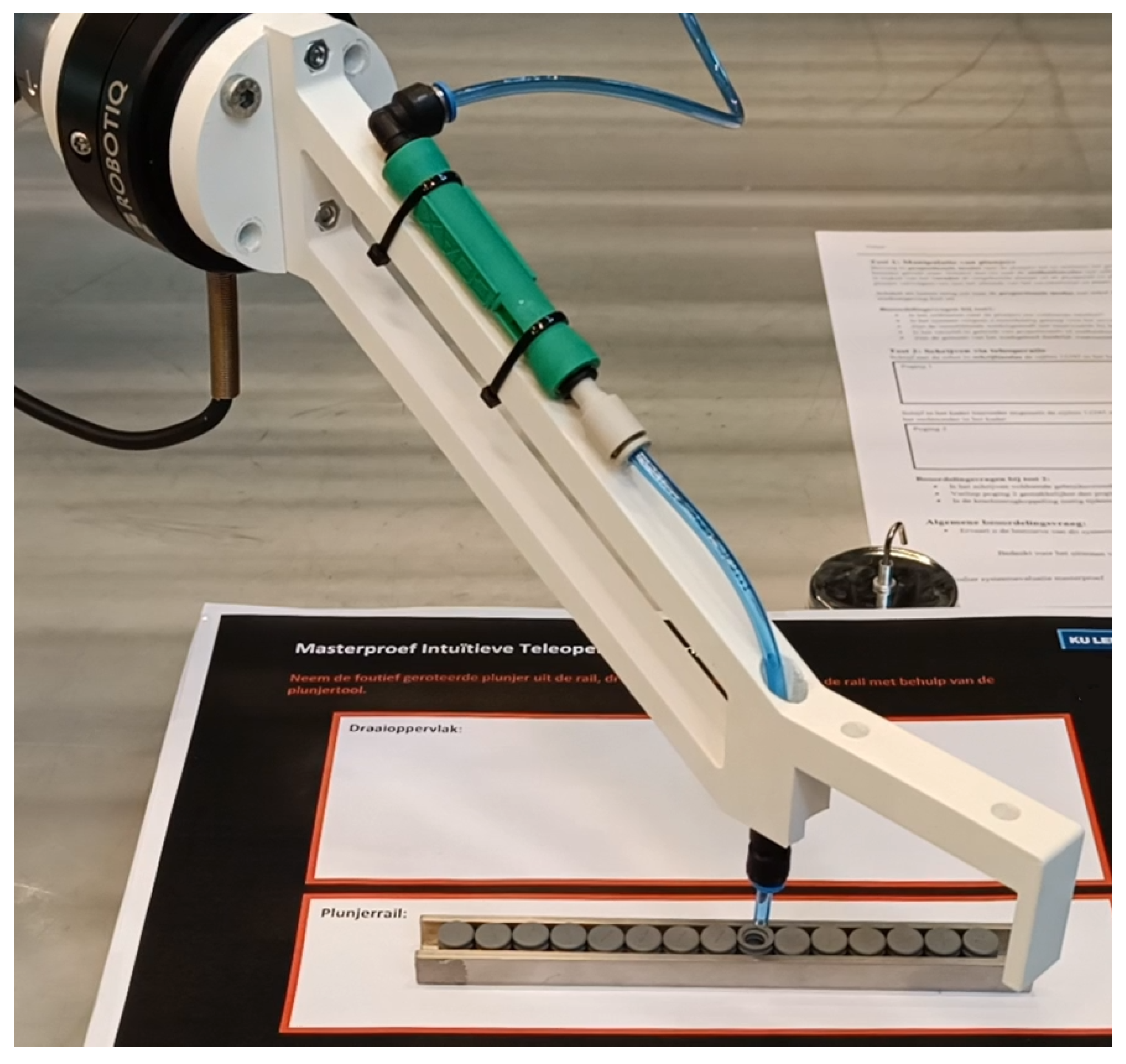
- Put the tool in the right orientation (Z-axis perpendicular to the table) and move the robot into the general area of the transport rail using the proportional mode;
- Switch to the velocity-based control and move the tip of the robot tool into the hole of the anomalous object for removal;
- Activate the vacuum of the tool, take out the object, put it down, turn it around and put it back in the rail in the correct orientation;
- Move away from the rail in any desired control mode.
- Do you find navigating towards the anomalous object intuitive?
- Is the system in your experience accurate enough to perform the task at hand?
- Do you find the different operation modes to be of added value for the execution of the task?
- Is the difference between proportional and velocity based control clear?
- Do you find the working area limitations useful?
- How intuitive do you find the system for writing (numbers)?
- Did you find the second attempt to be easier than the first?
- Is the force feedback a useful addition for this task?
4. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Boxplot Data for Participants’ Test Results

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attempt 1 (s) | Attempt 2 (s) | |
|---|---|---|
| Minimum | 73 | 64 |
| First quartile | 89 | 75 |
| Median | 108 | 79 |
| Third quartile | 141 | 84 |
| Maximum | 154 | 98 |
| Inter Quartile Range (IQR) | 52 | 9 |
Appendix B. Users’ Questionnaire Response Results
| Question Nr. | Very Negative | Negative | Positive | Very Positive | |
|---|---|---|---|---|---|
| Question 1 | # of votes | 0 | 0 | 7 | 7 |
| Percentage | 0.0% | 0.0% | 50.0% | 50.0% | |
| Question 2 | # of votes | 0 | 0 | 1 | 13 |
| Percentage | 0.0% | 0.0% | 7.1% | 92.9% | |
| Question 3 | # of votes | 0 | 1 | 1 | 12 |
| Percentage | 0.0% | 7.1% | 7.1% | 85.7% | |
| Question 4 | # of votes | 0 | 0 | 3 | 11 |
| Percentage | 0.0% | 0.0% | 21.4% | 78.6% | |
| Question 5 | # of votes | 0 | 1 | 2 | 11 |
| Percentage | 0.0% | 7.1% | 14.3% | 78.6% | |
| Question 6 | # of votes | 0 | 2 | 10 | 2 |
| Percentage | 0.0% | 14.3% | 71.4% | 14.3% | |
| Question 7 | # of votes | 0 | 3 | 5 | 6 |
| Percentage | 0.0% | 21.4% | 35.7% | 42.9% | |
| Question 8 | # of votes | 0 | 2 | 4 | 8 |
| Percentage | 0.0% | 14.3% | 28.6% | 57.1% | |
| Total | # of votes | 0 | 9 | 33 | 70 |
| Percentage | 0.0% | 8.0% | 29.5% | 62.5% |
Appendix C. Participants’ Writing Results

References
- Zhao, B.; Zhang, S.; Wu, Z.; Yang, B.; Xu, K. CombX: Design and experimental characterizations of a haptic device for surgical teleoperation. Int. J. Med. Robot. Comput. Assist. Surg. 2020, 16, e2042. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Li, J.; Wang, S.; Su, H.; Jiang, X. System design and animal experiment study of a novel minimally invasive surgical robot. Int. J. Med. Robot. Comput. Assist. Surg. 2015, 12, 73–84. [Google Scholar] [CrossRef] [PubMed]
- Kaouk, J.H.; Haber, G.P.; Autorino, R.; Crouzet, S.; Ouzzane, A.; Flamand, V.; Villers, A. A Novel Robotic System for Single-port Urologic Surgery: First Clinical Investigation. Eur. Urol. 2014, 66, 1033–1043. [Google Scholar] [CrossRef] [PubMed]
- Tokatli, O.; Das, P.; Nath, R.; Pangione, L.; Altobelli, A.; Burroughes, G.; Jonasson, E.T.; Turner, M.F.; Skilton, R. Robot-Assisted Glovebox Teleoperation for Nuclear Industry. Robotics 2021, 10, 85. [Google Scholar] [CrossRef]
- Desbats, P.; Geffard, F.; Piolain, G.; Coudray, A. Force-feedback teleoperation of an industrial robot in a nuclear spent fuel reprocessing plant. Ind. Robot. Int. J. 2006, 33, 178–186. [Google Scholar] [CrossRef]
- Ghosh, A.; Paredes Soto, D.A.; Veres, S.M.; Rossiter, A. Human Robot Interaction for Future Remote Manipulations in Industry 4.0. IFAC-PapersOnLine 2020, 53, 10223–10228. [Google Scholar] [CrossRef]
- Abdeldjallil, N.; Dario, M.; Joao, B.; Tefera, Y.T.; Domenico, P.; Caldwell, D.G.; Mattos, L.S.; Nikhil, D. The Vicarios Virtual Reality Interface for Remote Robotic Teleoperation. J. Intell. Robot. Syst. 2021, 101, 80. [Google Scholar]
- Tonel Lima, A.; Santos Rocha, F.A.; Torre, M.P.; Azpúrua, H.; Medeiros Freitas, G. Teleoperation of an ABB IRB 120 Robotic Manipulator and BarrettHand BH8-282 Using a Geomagic Touch X Haptic Device and ROS. In Proceedings of the 2018 Latin American Robotic Symposium, 2018 Brazilian Symposium on Robotics (SBR) and 2018 Workshop on Robotics in Education (WRE), João Pessoa, Brazil, 6–10 November 2018; pp. 188–193. [Google Scholar] [CrossRef]
- The Geomagic Touch X. 2022. Available online: https://www.3dsystems.com/haptics-devices/touch-x (accessed on 17 February 2023).
- Argin, O.F.; Bayraktaroglu, Z.Y. Peg-in-a-hole by haptic teleoperation. IOP Conf. Ser. Mater. Sci. Eng. 2019, 707, 012015. [Google Scholar] [CrossRef]
- Bimbo, J.; Pacchierotti, C.; Aggravi, M.; Tsagarakis, N.; Prattichizzo, D. Teleoperation in cluttered environments using wearable haptic feedback. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3401–3408. [Google Scholar] [CrossRef]
- The Geomagic Touch. 2022. Available online: https://www.3dsystems.com/haptics-devices/touch (accessed on 17 February 2023).
- Coleman, D.; Sucan, I.; Chitta, S.; Correll, N. Reducing the Barrier to Entry of Complex Robotic Software: A MoveIt! Case Study. arXiv 2014, arXiv:1404.3785. [Google Scholar] [CrossRef]
- Stejskal, T.; Svetlík, J.; Ondočko, Š. Mapping Robot Singularities through the Monte Carlo Method. Appl. Sci. 2022, 12, 8330. [Google Scholar] [CrossRef]
- Pan, J.; Chitta, S.; Manocha, D. FCL: A general purpose library for collision and proximity queries. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 3859–3866. [Google Scholar] [CrossRef]
- Coumans, E.; Bai, Y. PyBullet, a Python Module for Physics Simulation for Games, Robotics and Machine Learning. 2016–2019. Available online: http://pybullet.org (accessed on 20 February 2023).
- The Robotiq FT300. 2018. Available online: https://tinyurl.com/2p8feazw (accessed on 20 February 2023).
- Ross, A.; Willson, V. Basic and Advanced Statistical Tests; Writing Result Sections and Creating Tables and Figures; Sense Publishers: Rotterdam, The Netherlands, 2017; pp. 17–20. [Google Scholar]
- Joshi, A.; Kale, S.; Chandel, S.; Pal, D. Likert Scale: Explored and Explained. Br. J. Appl. Sci. Technol. 2015, 7, 396–403. [Google Scholar] [CrossRef]
- Wu, H.; Leung, S.O. Can Likert Scales be Treated as Interval Scales?—A Simulation Study. J. Soc. Serv. Res. 2017, 43, 527–532. [Google Scholar] [CrossRef]















| Participant | Attempt 1 (s) | Attempt 2 (s) | Time Difference (s) | Improvement (%) |
|---|---|---|---|---|
| P1 | 100 | 91 | 9 | 9.0 |
| P2 | 141 | 76 | 65 | 46.1 |
| P3 | 110 | 75 | 35 | 31.8 |
| P4 | 94 | 75 | 19 | 20.2 |
| P5 | 139 | 84 | 55 | 39.6 |
| P6 | 105 | 84 | 21 | 20.0 |
| P7 | 142 | 143 | −1 | −0.7 |
| P8 | 85 | 74 | 11 | 12.9 |
| P9 | 150 | 120 | 30 | 20.0 |
| P10 | 114 | 81 | 33 | 28.9 |
| P11 | 79 | 67 | 12 | 15.2 |
| P12 | 87 | 64 | 23 | 26.4 |
| P13 | 79 | 78 | 1 | 1.3 |
| P14 | 154 | 80 | 74 | 48.1 |
| Average | 112 | 85 | 27 | 22.8 |
| Attempt 1 | Attempt 2 | |
|---|---|---|
| Mean | 107 | 77 |
| Variance | 647 | 55 |
| Observations | 12 | 12 |
| t-Test Results | ||
| Pearson Correlation | 0.407 | |
| Hypothesised Mean Difference | 0 | |
| Degrees of freedom | 11 | |
| Alpha | 0.05 | |
| t static | 4.411 | |
| P(T ≤ t) two-tail | 0.001 | |
| t Critical two-tail | 2.201 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dekker, I.; Kellens, K.; Demeester, E. Design and Evaluation of an Intuitive Haptic Teleoperation Control System for 6-DoF Industrial Manipulators. Robotics 2023, 12, 54. https://doi.org/10.3390/robotics12020054
Dekker I, Kellens K, Demeester E. Design and Evaluation of an Intuitive Haptic Teleoperation Control System for 6-DoF Industrial Manipulators. Robotics. 2023; 12(2):54. https://doi.org/10.3390/robotics12020054
Chicago/Turabian StyleDekker, Ivo, Karel Kellens, and Eric Demeester. 2023. "Design and Evaluation of an Intuitive Haptic Teleoperation Control System for 6-DoF Industrial Manipulators" Robotics 12, no. 2: 54. https://doi.org/10.3390/robotics12020054
APA StyleDekker, I., Kellens, K., & Demeester, E. (2023). Design and Evaluation of an Intuitive Haptic Teleoperation Control System for 6-DoF Industrial Manipulators. Robotics, 12(2), 54. https://doi.org/10.3390/robotics12020054