
The Effect of Sideslip on Jackknife Limits during Low Speed Trailer Operation


Abstract
:1. Introduction
1.1. Related Work
1.2. Contributions
1.3. Paper Structure
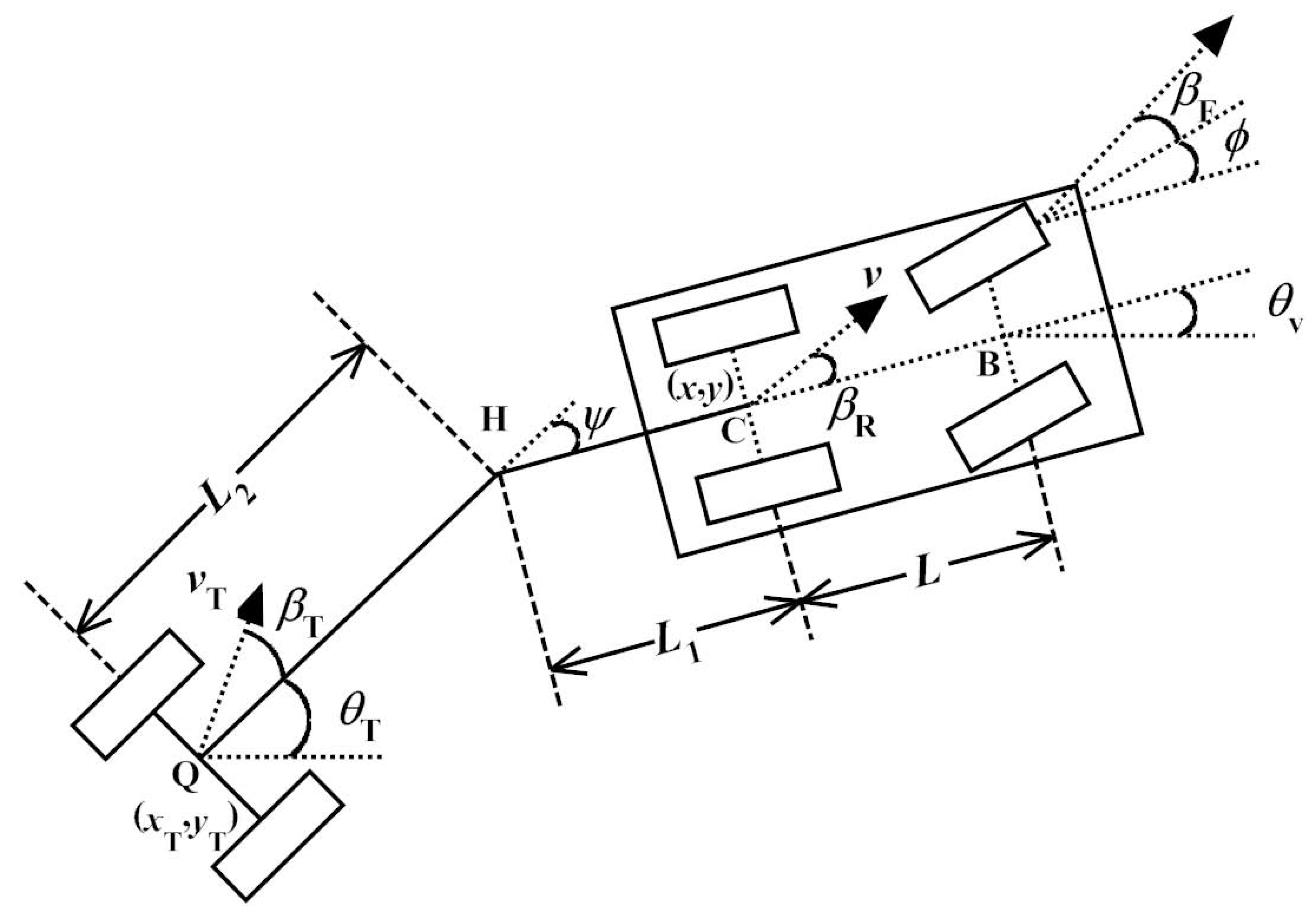
2. Vehicle-Trailer Kinematic Model
3. Jackknife Analysis
3.1. Jackknife Criteria
- 1.
- If , then the system is in a jackknife state.
- 2.
- If cannot be achieved by achievable vehicle curvatures and , then the system is in a jackknife state.
- 3.
- For all other cases can be achieved and the system is in a non-jackknife state.
- 1.
- If , , or , then the system is in a jackknife state.
- 2.
- Otherwise, the system is in a non-jackknife state.
3.2. Jackknife Limits
3.3. Vehicle-Trailer Categories
3.4. Short Trailer Analysis
- Sub-case S-1: if , there are two non-jackknife regions. The first non-jackknife region is . The second non-jackknife region is .
- Sub-case S-2: if , there are two non-jackknife regions. The first non-jackknife region is . The second non-jackknife region is .
3.5. Medium Trailer Analysis
- Sub-case M-1: if and , there are two non-jackknife regions. The first non-jackknife region is . The second non-jackknife region is .
- Sub-case M-2: if and , there is only one non-jackknife region, which is .
- Sub-case M-3: if and , there are two non-jackknife regions. The first non-jackknife region is . The second non-jackknife region is . This is shown in Figure 3.
- Sub-case M-4: if and , then their is no non-jackknife region and no jackknife limit since jackknifing occurs under all conditions.
- Sub-case M-5: if and , there is only one non-jackknife region, which is .
- Sub-case M-6: if and , there are two non-jackknife regions. The first non-jackknife region is . The second non-jackknife region is .
3.6. Long Trailer Analysis
- Sub-case L-1: if and , there is only one non-jackknife region covering all hitch angle, i.e., hitch angle is always non-jackknifing. Thus, there is no non-jackknife region and no jackknife limit. This is the only sub-case where all hitch angles are non-jackknifing.
- Sub-case L-2: if and , there is only one non-jackknife region, which is . This non-jackknife region typically wraps around rad.
- Sub-case L-3: if and , there is only one non-jackknife region, which is . This non-jackknife region typically wraps around rad.
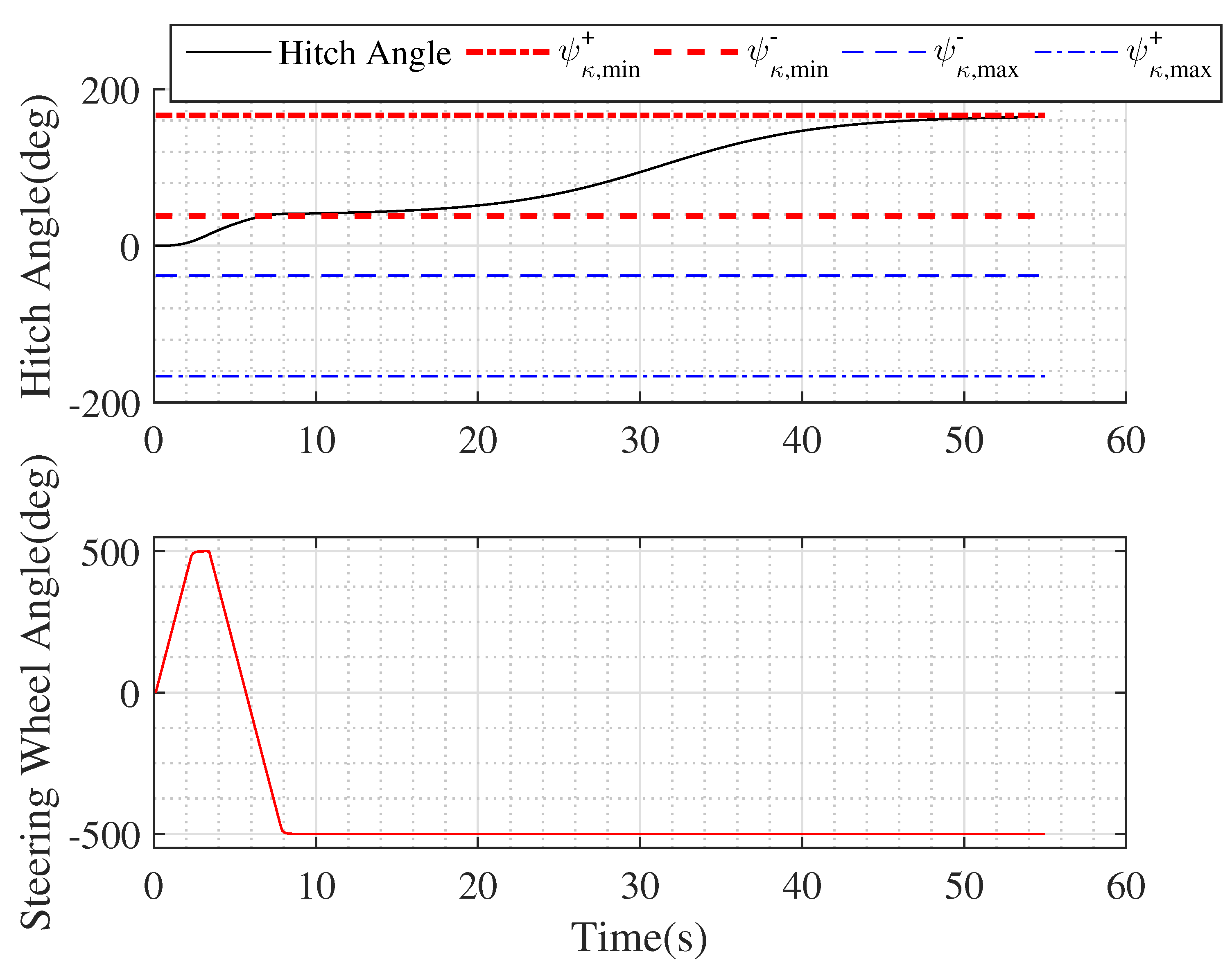
- Sub-case L-4: if and , there are two non-jackknife regions, Figure 4. The first non-jackknife region is . The second non-jackknife region is . This is the most common sub-case in actual trailer tasks among all the sub-cases including those of the Short and Medium Trailer case.
- Sub-case L-5 if or , there is no non-jackknife region and thus no jackknife limit. The trailer is always jackknifing.
4. Safe and Unsafe Jackknife Limits
4.1. Overlapping Conditions for Jackknife Limits
- 1.
- Case O-1: if , then there are overlapping jackknife limits at either or , Table 2, where is represented by . This is in the Short Trailer case, thus as mentioned in Section 3.4. Note that this is the only case where the hitch angle can stay constant within a jackknife region.
- 2.
- Case O-2: if , , , and , then and . Additionally, if , , , and , then all jackknife limits are equal. Note that this is in either the Short Trailer or the Medium Trailer case, thus as mentioned in Section 3.4 and Section 3.5.
- 3.
- Case O-3: if , , and , then . If , , and , then . Note that this is in either the Medium Trailer or the Long Trailer case.
- .
- , and or .
- , , and .
4.2. General Criteria for Safe and Unsafe Jackknife Limits
- 1.
- If the non-jackknife region (if there exists one) is adjacent to and on the positive side of , is a safe jackknife if . Otherwise it is an unsafe jackknife limit.
- 2.
- If the non-jackknife region (if there exists one) is adjacent to and on the negative side of , is a safe jackknife if . Otherwise it is an unsafe jackknife limit.
- Jackknife limits at and (i.e., the Overlapping Case O-1, Case O-2, and the non-overlapping jackknife limits at and ).
- Overlapping jackknife limits satisfying Overlapping Case O-3.
- Typical Jackknife Limits as defined in Definition 5.
4.3. Typical Safe and Unsafe Jackknife Limits
5. Results and Discussion
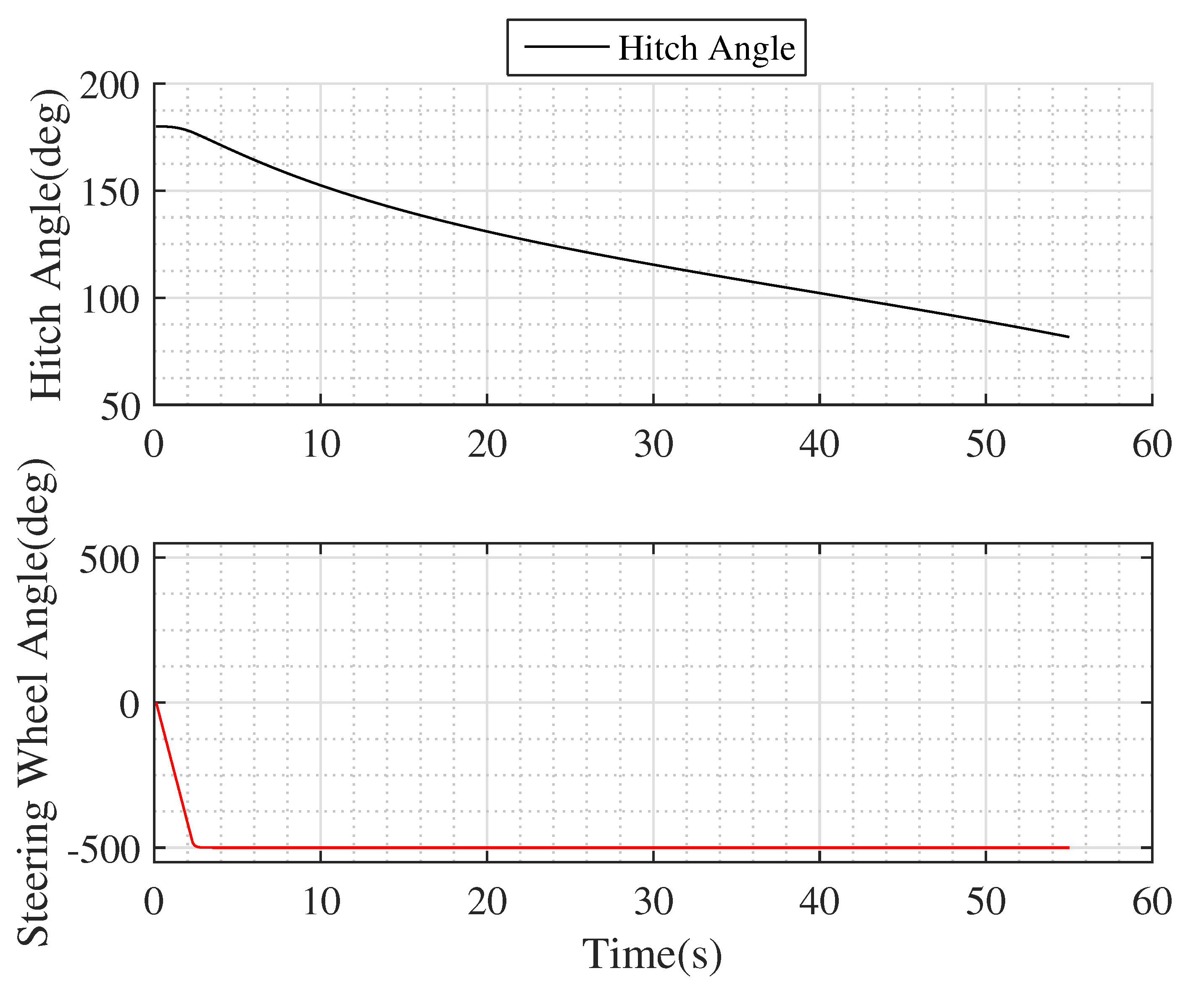
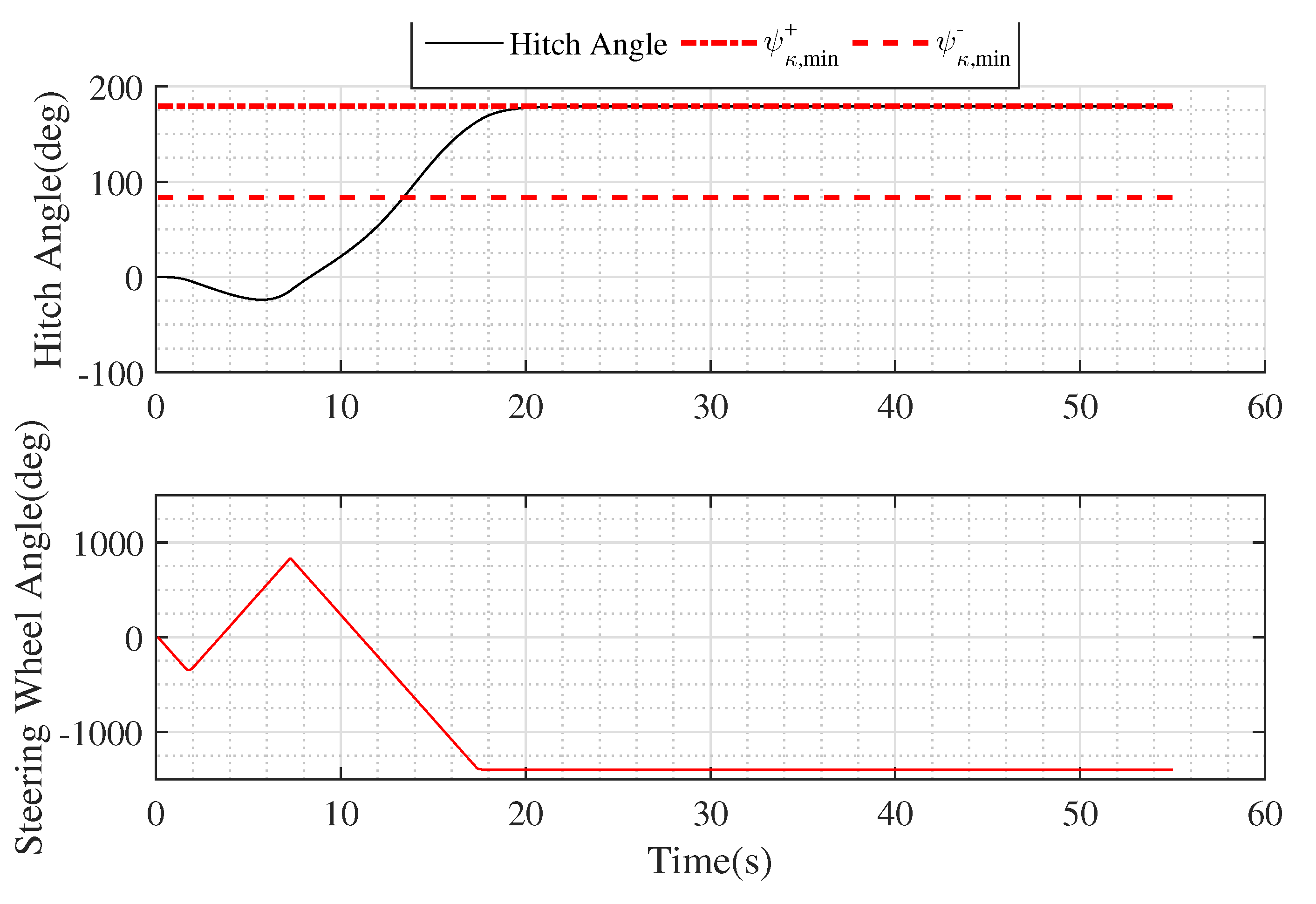
5.1. Simulation Results for Jackknifing Behaviors
5.2. The Impact of Sideslip
5.3. Experimental Results
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| B | Front axle center (label, no units) |
| C | Rear axle center (label, no units) |
| H | Hitch point (label, no units) |
| Q | Trailer axle center (label, no units) |
| Vehicle coordinate, the coordinate of C (m) | |
| Trailer coordinate, the coordinate of Q (m) | |
| v | Vehicle speed (m/s) |
| Steering angle (deg or rad as indicated) | |
| Vehicle heading (deg or rad as indicated) | |
| Trailer heading (deg or rad as indicated) | |
| Hitch angle (deg or rad as indicated) | |
| L | Vehicle wheel base (m) |
| Hitch length (m) | |
| Trailer tongue length (m) | |
| Front wheel sideslip (deg or rad as indicated) | |
| Rear wheel sideslip (deg or rad as indicated) | |
| Trailer wheel sideslip (deg or rad as indicated) | |
| Vehicle movement curvature (1/m) | |
| , | Min/Max achievable vehicle curvature (1/m) |
| Critical Vehicle Curvature (1/m) | |
| , | Local min/max of (1/m) |
| , | Jackknife limits resulted from (1/m) |
| , | Jackknife limits resulted from (1/m) |
| , | Uncontrollable Hitch Angles (deg or rad as indicated) |
References
- Tanaka, K.; Kosaki, T.; Wang, H.O. Backing control problem of a mobile robot with multiple trailers: Fuzzy modeling and LMI-based design. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 1998, 28, 329–337. [Google Scholar] [CrossRef]
- Matsushita, K.; Murakami, T. Nonholonomic Equivalent Disturbance Based Backward Motion Control of Tractor-Trailer with Virtual Steering. IEEE Trans. Ind. Electron. 2008, 55, 280–287. [Google Scholar] [CrossRef]
- Altafini, C.; Speranzon, A.; Wahlberg, B. A feedback control scheme for reversing a truck and trailer vehicle. IEEE Trans. Robot. Autom. 2001, 17, 915–922. [Google Scholar] [CrossRef]
- Pradalier, C.; Usher, K. A simple and efficient control scheme to reverse a tractor-trailer system on a trajectory. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 2208–2214. [Google Scholar]
- González-Cantos, A.; Ollero, A. Backing-Up Maneuvers of Autonomous Tractor-Trailer Vehicles using the Qualitative Theory of Nonlinear Dynamical Systems. Int. J. Robot. Res. 2009, 28, 49–65. [Google Scholar] [CrossRef]
- Yuan, H.; Zhu, H. Anti-jackknife reverse tracking control of articulated vehicles in the presence of actuator saturation. Veh. Syst. Dyn. 2016, 54, 1428–1447. [Google Scholar] [CrossRef]
- Chiu, J.; Goswami, A. The critical hitch angle for jackknife avoidance during slow backing up of vehicle–trailer systems. Veh. Syst. Dyn. 2014, 52, 992–1015. [Google Scholar] [CrossRef]
- Jing, J.; Maroli, J.M.; Salamah, Y.B.; Hejase, M.; Fiorentini, L.; Özgüner, U. Control Method Designs and Comparisons for Tractor-Trailer Vehicle Backward Path Tracking. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 5531–5537. [Google Scholar]
- Aldughaiyem, A.; Bin Salamah, Y.; Ahmad, I. Control design and assessment for a reversing tractor–trailer system using a cascade controller. Appl. Sci. 2021, 11, 10634. [Google Scholar] [CrossRef]
- Vlk, F. Lateral Dynamics of Commercial Vehicle Combinations A Literature Survey. Veh. Syst. Dyn. 1982, 11, 305–324. [Google Scholar] [CrossRef]
- McCann, R.; Le, A. Electric motor based steering for jackknife avoidance in large trucks. In Proceedings of the 2005 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 7 September 2005. [Google Scholar] [CrossRef]
- Keller, A.T. Jackknife Control for Tractor-Trailer; SAE Technical Paper; SAE International: Warrendale, PA, USA, 1973. [Google Scholar]
- Gaussoin, J. Improving Air Brakes; SAE Technical Paper; SAE International: Warrendale, PA, USA, 1948. [Google Scholar] [CrossRef]
- Leng, Z.; Minor, M.A. Curvature-Based Ground Vehicle Control of Trailer Path Following Considering Sideslip and Limited Steering Actuation. IEEE Trans. Intell. Transp. Syst. 2017, 18, 332–348. [Google Scholar] [CrossRef]
- Yoo, K.; Chung, W. Pushing motion control of n passive off-hooked trailers by a car-like mobile robot. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 4928–4933. [Google Scholar]
- Pradalier, C.; Usher, K. Robust trajectory tracking for a reversing tractor trailer. J. Field Robot. 2008, 25, 378–399. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Criteria |
|---|---|
| Short Trailer | |
| Medium Trailer | |
| Long Trailer |
| Overlapping Limits | |||
|---|---|---|---|
| <0 | > | > | |
| > | = | ||
| > | < | ||
| Additionally | |||
| , if and | |||
| = | < | ||
| < | < | ||
| =0 | <∞ | > | |
| =∞ | > | ||
| <∞ | = | ||
| =∞ | = | All jackknife limits | |
| >0 | > | > | |
| > | = | ||
| > | < | ||
| Additionally | |||
| =, if and | |||
| = | < | ||
| < | < |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leng, Z.; Wang, Y.; Xin, M.; Minor, M.A. The Effect of Sideslip on Jackknife Limits during Low Speed Trailer Operation. Robotics 2022, 11, 133. https://doi.org/10.3390/robotics11060133
Leng Z, Wang Y, Xin M, Minor MA. The Effect of Sideslip on Jackknife Limits during Low Speed Trailer Operation. Robotics. 2022; 11(6):133. https://doi.org/10.3390/robotics11060133
Chicago/Turabian StyleLeng, Zhe, Yue Wang, Ming Xin, and Mark A. Minor. 2022. "The Effect of Sideslip on Jackknife Limits during Low Speed Trailer Operation" Robotics 11, no. 6: 133. https://doi.org/10.3390/robotics11060133
APA StyleLeng, Z., Wang, Y., Xin, M., & Minor, M. A. (2022). The Effect of Sideslip on Jackknife Limits during Low Speed Trailer Operation. Robotics, 11(6), 133. https://doi.org/10.3390/robotics11060133