
RoboNav: An Affordable Yet Highly Accurate Navigation System for Autonomous Agricultural Robots




Abstract
1. Introduction
2. Materials and Methods
2.1. Dual GPS with RTK
2.2. IMU
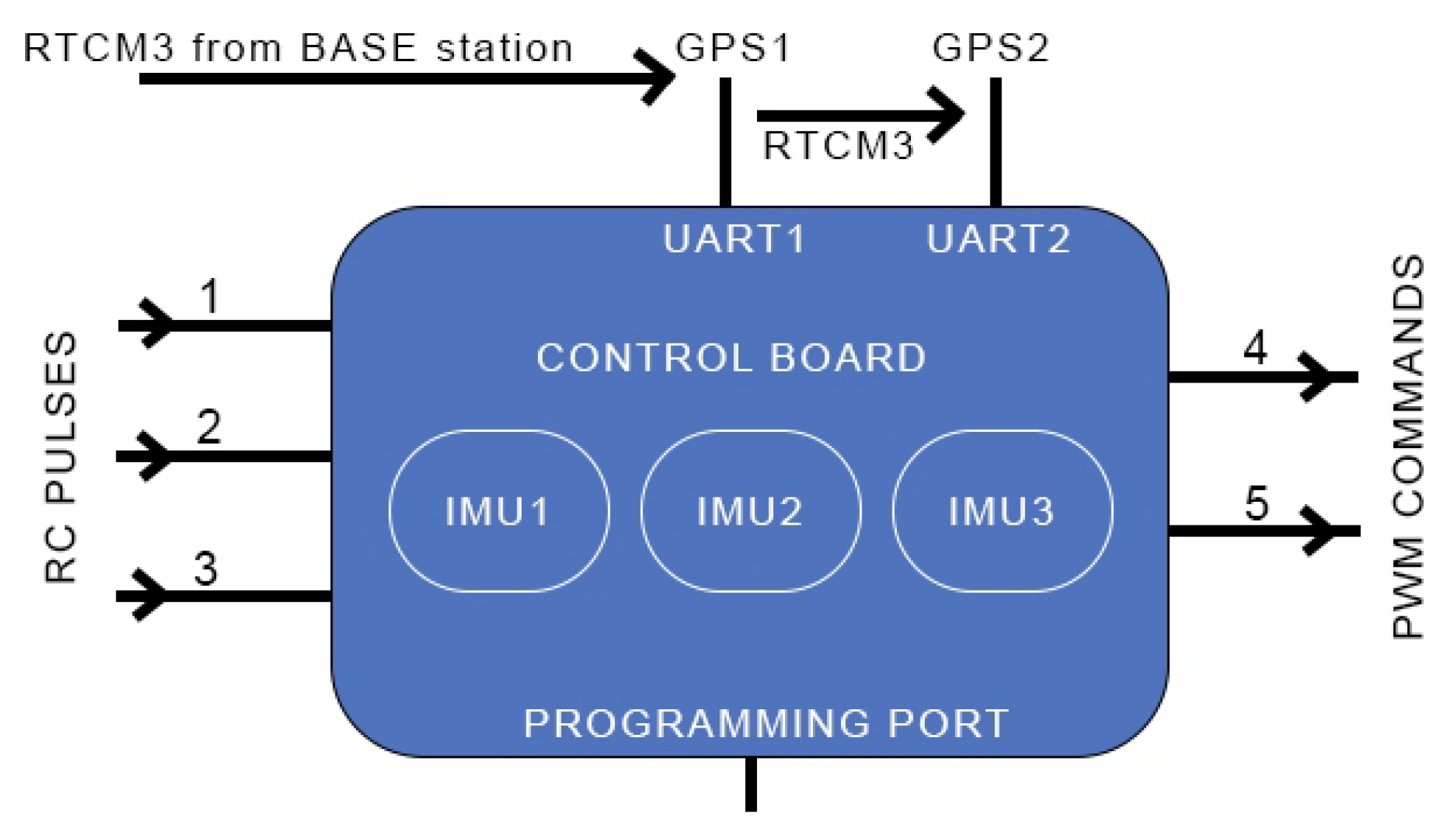
2.3. The Rover Hardware Architecture
2.4. Bill of Materials
3. The Navigation System
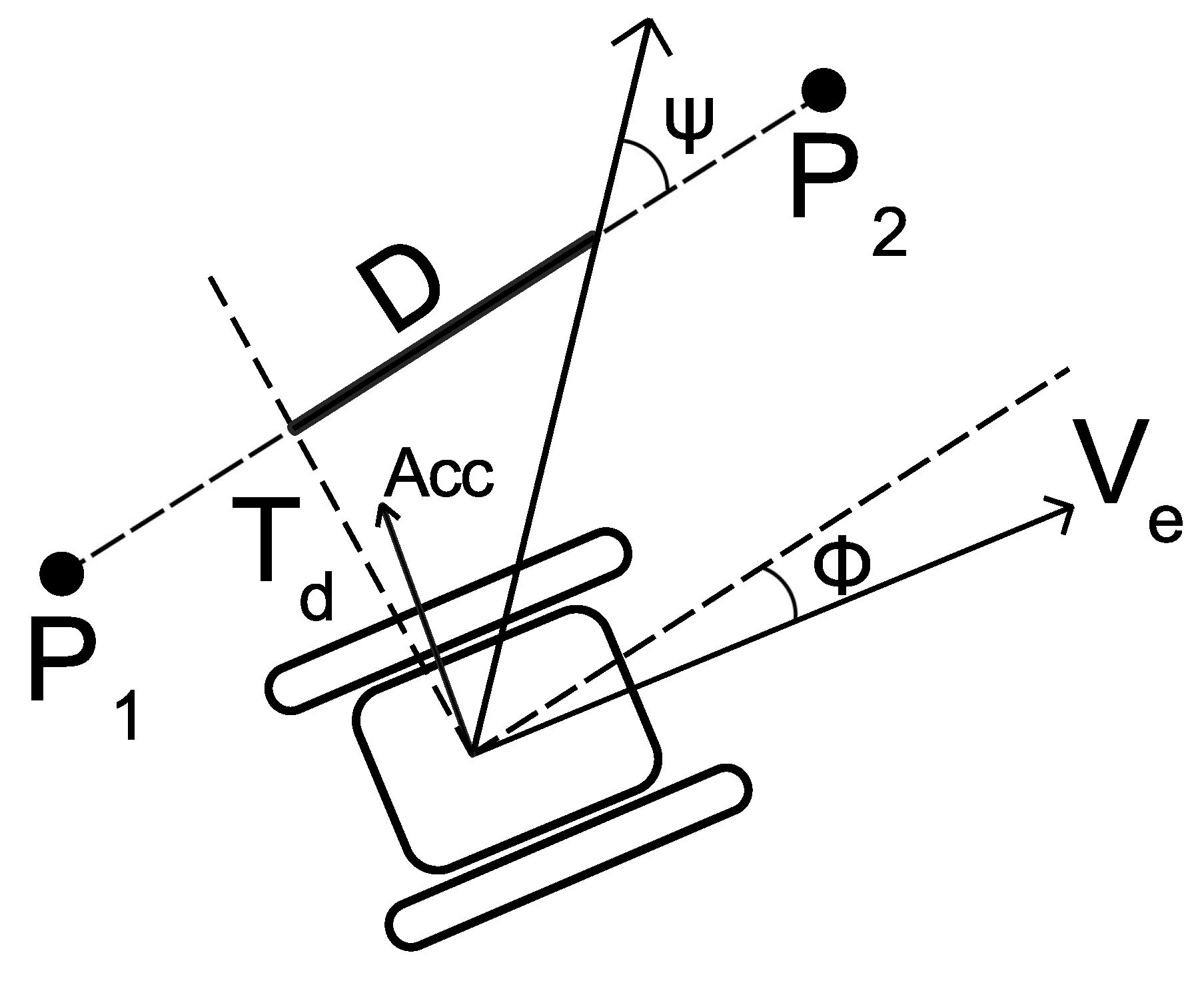
3.1. Path following with Crosstrack
4. Experimental Results
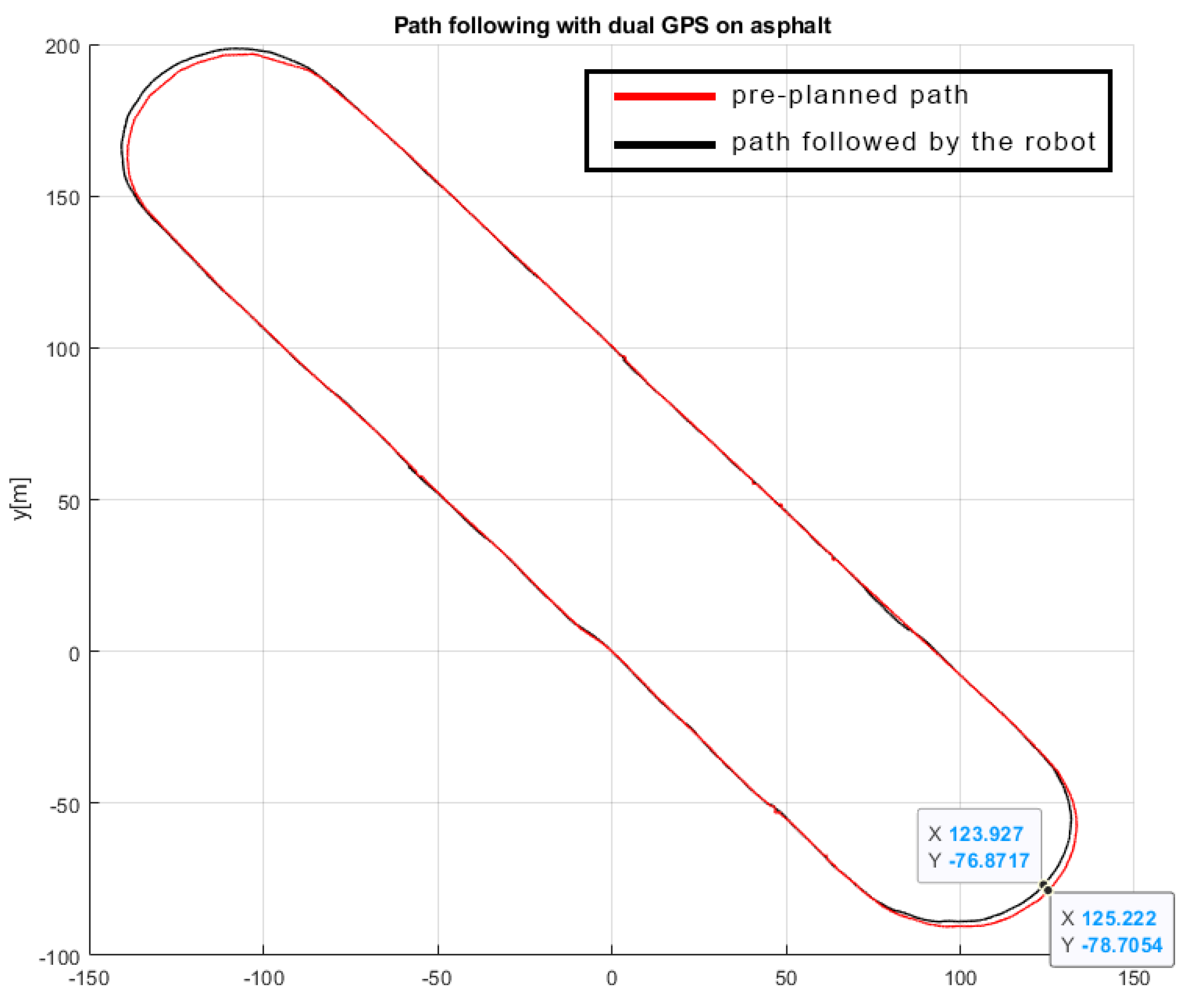
4.1. Path following Validation
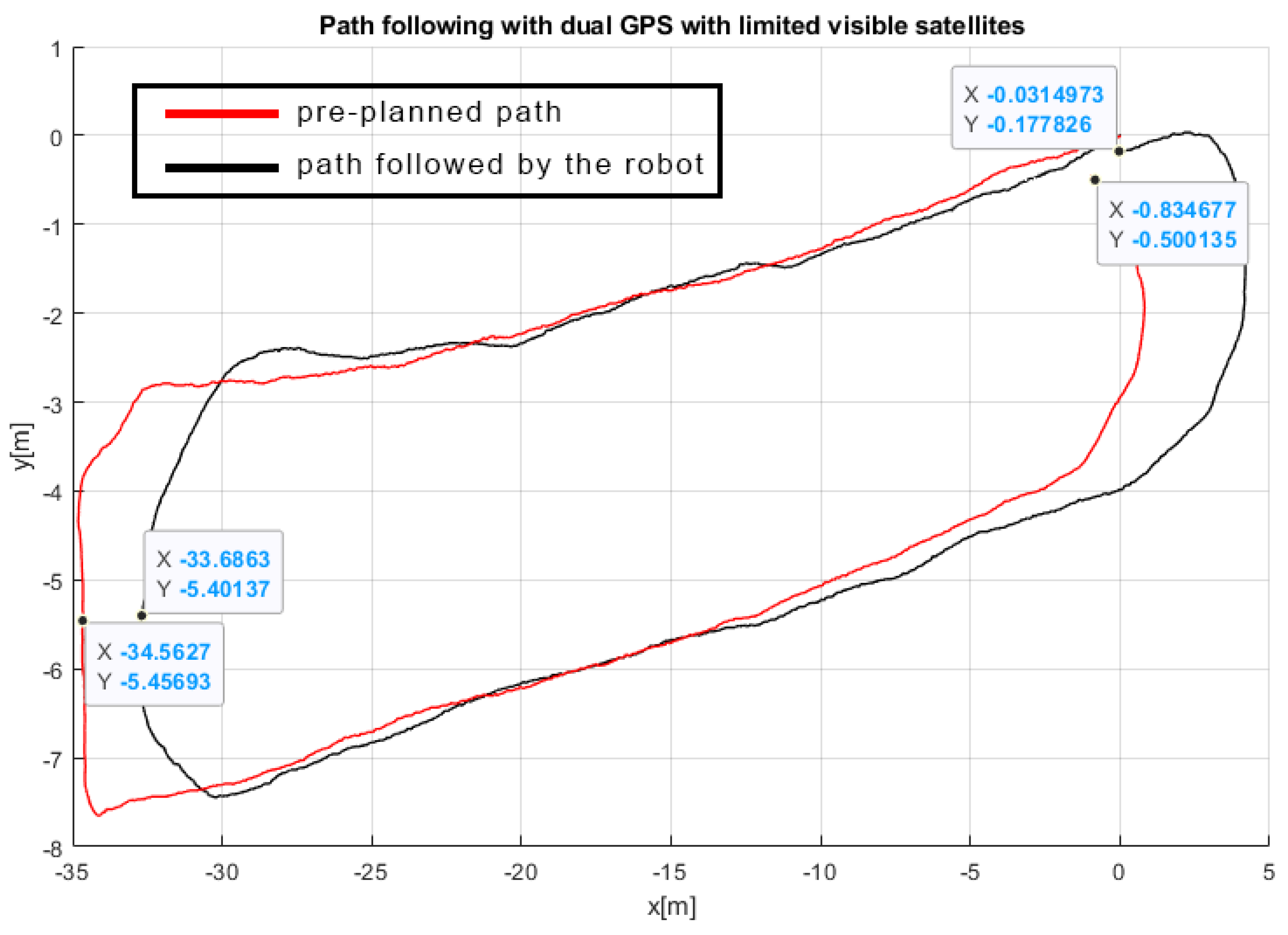
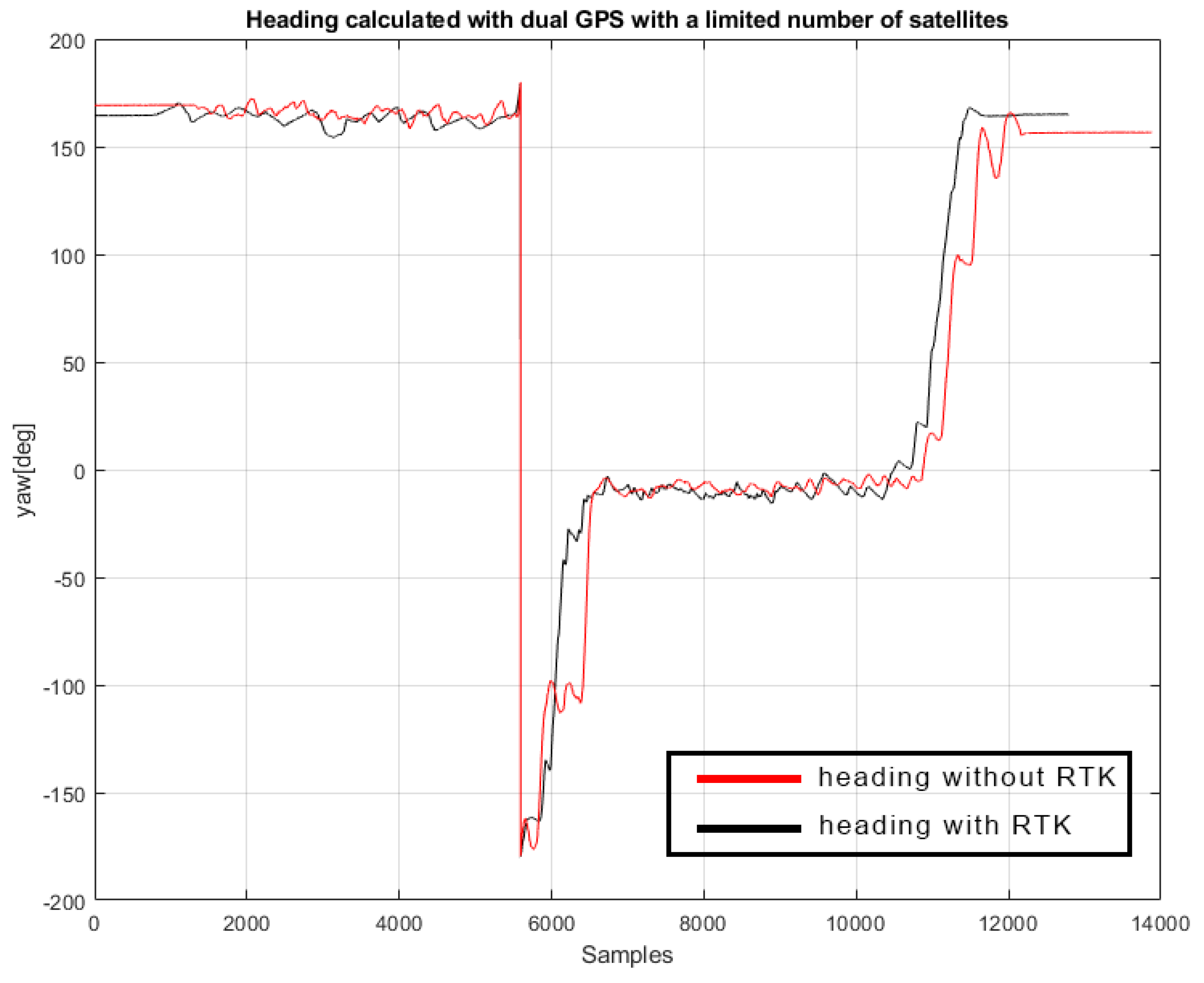
4.2. Performance with Limited Number of Visible Satellites
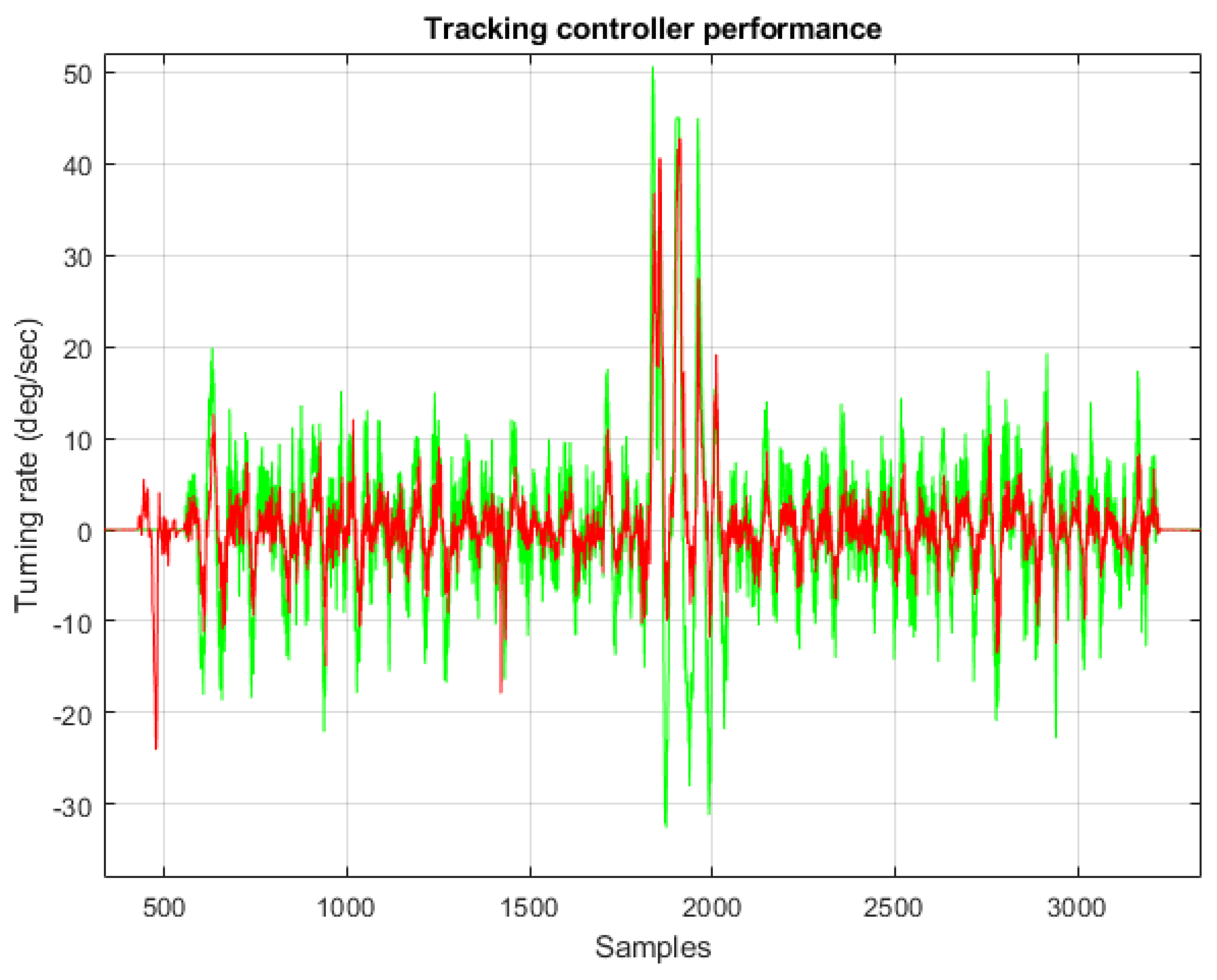
4.3. Tracking Controller Evaluation
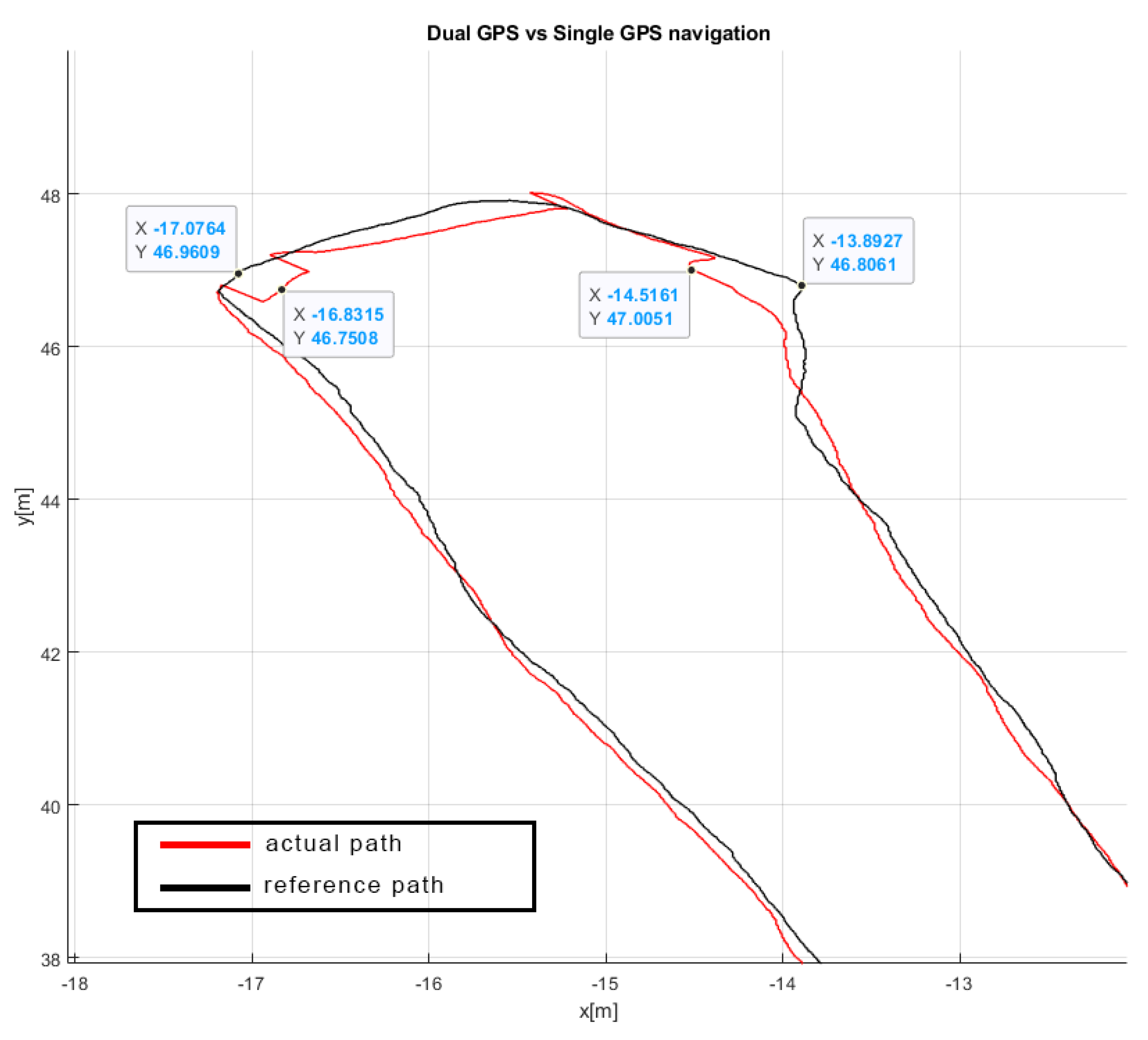
4.4. Dual GPS vs. Single GPS Navigation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| LiDAR | Light Detection and Ranging |
| IMU | Inertial Measurement Unit |
| RTK | Real-time kinematic positioning |
| GSF | Gaussian Sum Filter |
| GPS | Global Positioning System |
References
- Shamshiri, R.; Weltzien, C.; Hameed, I.; Yule, I.; Grift, T.; Balasundram, S.; Pitonakova, L.; Ahmad, D.; Chowdhary, G. Research and development in agricultural robotics: A perspective of digital farming. Int. J. Agric. Biol. Eng. 2018, 11, 1–14. [Google Scholar] [CrossRef]
- Galati, R.; Mantriota, G.; Reina, G. Mobile Robotics for Sustainable Development: Two Case Studies. In Proceedings of the International Workshop IFToMM for Sustainable Development Goals, Online, 25–26 November 2022; pp. 372–382. [Google Scholar]
- Galati, R.; Mantriota, G.; Reina, G. Design and Development of a Tracked Robot to Increase Bulk Density of Flax Fibers. J. Mech. Robot. 2021, 13, 050903. [Google Scholar] [CrossRef]
- Raja, V.; Bhaskaran, B.; Nagaraj, K.; Sampathkumar, J.; Senthilkumar, S. Agricultural harvesting using integrated robot system. Indones. J. Electr. Eng. Comput. Sci. 2022, 25, 152. [Google Scholar] [CrossRef]
- Halstead, M.; McCool, C.; Denman, S.; Perez, T.; Fookes, C. Fruit Quantity and Ripeness Estimation Using a Robotic Vision System. IEEE Robot. Autom. Lett. 2018, 3, 2995–3002. [Google Scholar] [CrossRef]
- Galati, R.; Reina, G.; Messina, A.; Gentile, A. Survey and navigation in agricultural environments using robotic technologies. In Proceedings of the 2017 14th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Lecce, Italy, 29 August–1 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Vougioukas, S. Agricultural Robotics. Annu. Rev. Control. Robot. Auton. Syst. 2019, 2, 365–392. [Google Scholar] [CrossRef]
- Oliveira, L.F.; Silva, M.; Moreira, A. Agricultural Robotics: A State of the Art Survey. In Proceedings of the 23rd International Conference Series on Climbing and Walking Robots and the Support Technologies for Mobile Machines, Moscow, Russia, 24–26 August 2020; pp. 279–286. [Google Scholar] [CrossRef]
- Rahman, M.M.; Ishii, K. Heading Estimation of Robot Combine Harvesters during Turning Maneuveres. Sensors 2018, 18, 1390. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Y.; Huang, Y.; Liu, X.; Liu, C. A Path Tracking Method for Autonomous Rice Drill Seeder in Paddy Fields. In Proceedings of the 2018 2nd International Conference on Mechanical, System and Control Engineering (ICMSC 2018), Moscow, Russia, 21–23 June 2018; Volume 220, p. 04004. [Google Scholar] [CrossRef][Green Version]
- Yin, X.; Wang, Y.; Chen, Y.; Jin, C.; Du, J. Development of autonomous navigation controller for agricultural vehicles. Int. J. Agric. Biol. Eng. 2020, 13, 70–76. [Google Scholar] [CrossRef]
- Taka, R.; Barawid, O.; Ish, K.; Noguch, N. Development of Crawler-Type Robot Tractor based on GPS and IMU. IFAC Proc. Vol. 2010, 43, 151–156. [Google Scholar] [CrossRef]
- Ojeda, L.; Reina, G.; Cruz, D.; Borenstein, J. The FLEXnav precision dead-reckoning system. Int. J. Veh. Auton. Syst. 2006, 4, 173–195. [Google Scholar] [CrossRef]
- Yu, S.; Jiang, Z. Design of the navigation system through the fusion of IMU and wheeled encoders. Comput. Commun. 2020, 160, 730–737. [Google Scholar] [CrossRef]
- Guevara, D.J.; Gené-Mola, J.; Gregorio, E.; Torres-Torriti, M.; Reina, G.; Cheein, F.A.A. Comparison of 3D scan matching techniques for autonomous robot navigation in urban and agricultural environments. J. Appl. Remote Sens. 2021, 15, 173–195. [Google Scholar] [CrossRef]
- Malavazi, F.; Guyonneau, R.; Fasquel, J.B.; Lagrange, S.; Mercier, F. LiDAR-only based navigation algorithm for an autonomous agricultural robot. Comput. Electron. Agric. 2018, 154, 71–79. [Google Scholar] [CrossRef]
- Alatise, M.; Hancke, G. Pose Estimation of a Mobile Robot Based on Fusion of IMU Data and Vision Data Using an Extended Kalman Filter. Sensors 2017, 17, 2164. [Google Scholar] [CrossRef] [PubMed]
- Tsun, M.T.K.; Lau, B.T.; Jo, H.S. Exploring the Performance of a Sensor-Fusion-based Navigation System for Human Following Companion Robots. Int. J. Mech. Eng. Robot. Res. 2018, 7, 590–598. [Google Scholar] [CrossRef]
- Ma, D.M.; Shiau, J.K.; Wang, I.C.; Lin, Y.H. Attitude Determination Using a MEMS-Based Flight Information Measurement Unit. Sensors 2012, 12, 1–23. [Google Scholar] [CrossRef]
- Abbas, M.; Kamel, A.; Elhalwagy, Y.; Albordany, R. Performance Enhancement of Low Cost Non-GPS Aided INS for Unmanned Applications. In Proceedings of the International Conference on Aerospace Sciences and Aviation Technology, Cairo, Egypt, 28–30 May 2013; Volume 15, pp. 1–18. [Google Scholar] [CrossRef]
- Mihajlow, R.; Demirev, V. Application of GPS navigation in agricultural aggregates. Annu. J. Tech. Univ. Varna Bulg. 2018, 2, 14–19. [Google Scholar] [CrossRef]
- Lan, H.; Elsheikh, M.; Abdelfatah, W.; Wahdan, A.; El-Sheimy, N. Integrated RTK/INS Navigation for Precision Agriculture. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation, Miami, FL, USA, 16–20 September 2019; pp. 4076–4086. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppa, H. Accuracy of Kinematic Positioning Using Global Satellite Navigation Systems under Forest Canopies. Forests 2015, 6, 3218–3236. [Google Scholar] [CrossRef]
- Yudanto, R.; Ompusunggu, A.P.; Bey-Temsamani, A. On improving low-cost IMU performance for online trajectory estimation. In Proceedings of the Smart Sensors, Actuators, and MEMS VII; and Cyber Physical Systems, Barcelona, Spain, 4–6 May 2015; Volume 9517, pp. 639–650. [Google Scholar] [CrossRef]
- Eun-Hwan, S.; El-Sheimy, N. Accuracy Improvement of Low Cost INS/GPS for Land Applications. In Proceedings of the 2002 National Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 28–30 January 2001. [Google Scholar]
- Consoli, A.; Ayadi, J.; Bianchi, G.; Pluchino, S.; Piazza, F.; Baddour, R.; Parés, M.E.; Navarro, J.; Colomina, I.; Gameiro, A.; et al. A multi-antenna approach for UAV’s attitude determination. In Proceedings of the 2015 IEEE Metrology for Aerospace (MetroAeroSpace), Benevento, Italy, 4–5 June 2015; pp. 401–405. [Google Scholar] [CrossRef]
- Nadarajah, N.; Teunissen, P.J.G.; Raziq, N. Instantaneous GPS–Galileo Attitude Determination: Single-Frequency Performance in Satellite-Deprived Environments. IEEE Trans. Veh. Technol. 2013, 62, 2963–2976. [Google Scholar] [CrossRef]
- Henkel, P.; Günther, C. Attitude determination with low-cost GPS/INS. In Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation, ION GNSS 2013, Nashville, TN, USA, 16–20 September 2013; Volume 3, pp. 2015–2023. [Google Scholar]
- Eling, C.; Klingbeil, L.; Kuhlmann, H. Real-time single-frequency GPS/MEMS-IMU attitude determination of lightweight UAVs. Sensors 2015, 15, 26212–26235. [Google Scholar] [CrossRef]
- Tu, X.; Tang, L. Headland Turning Optimisation for Agricultural Vehicles and Those with Towed Implements. J. Agric. Food Res. 2019, 1, 100009. [Google Scholar] [CrossRef]
- Peng, C.; Fei, Z.; Vougioukas, S. Depth camera based row-end detection and headland maneuvering in orchard navigation without GNSS. In Proceedings of the 30th Mediterranean Conference on Control and Automation, Athens, Greece, 28 June–1 July 2022. [Google Scholar]
- Loukatos, D.; Petrongonas, E.; Manes, K.; Kyrtopoulos, I.V.; Dimou, V.; Arvanitis, K.G. A Synergy of Innovative Technologies towards Implementing an Autonomous DIY Electric Vehicle for Harvester-Assisting Purposes. Machines 2021, 9, 82. [Google Scholar] [CrossRef]
- Winterhalter, W.; Fleckenstein, F.; Dornhege, C.; Burgard, W. Localization for precision navigation in agricultural fields—Beyond crop row following. J. Field Robot. 2021, 38, 429–451. [Google Scholar] [CrossRef]
- Shah, H.; Mehta, K.; Gandhi, S. Autonomous Navigation of 3 Wheel Robots Using Rotary Encoders and Gyroscope. In Proceedings of the 2014 International Conference on Computational Intelligence and Communication Networks, Bhopal, MP, USA, 14–16 November 2014; pp. 1168–1172. [Google Scholar] [CrossRef]
- Alsalamy, S.; Foo, B.; Frels, G. Autonomous Navigation and Mapping Using LiDAR. 2018. Available online: https://digitalcommons.calpoly.edu/cgi/viewcontent.cgi?article=1302&context=cpesp (accessed on 1 April 2022).
- Fan, Z.; Li, Z.; Cui, X.; Lu, J. Precise and Robust RTK-GNSS Positioning in Urban Environments with Dual-Antenna Configuration. Sensors 2019, 19, 3586. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J. Autonomous navigation for an unmanned mobile robot in urban areas. In Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, Beijing, China, 7–10 August 2011; pp. 2243–2248. [Google Scholar] [CrossRef]
- Cepe, A. True Heading Estimation Using Two Gps Receivers And Carrier Phase Observables. In Proceedings of the 9th Saint Petersburg International Conference on Integrated Navigation Systems, St. Petersburg, Russia, 26–28 May 2012. [Google Scholar]
- Azdy, R.; Darnis, F. Use of Haversine Formula in Finding Distance Between Temporary Shelter and Waste End Processing Sites. J. Phys. Conf. Ser. 2020, 1500, 012104. [Google Scholar] [CrossRef]
- Meier, L.; Honegger, D.; Pollefeys, M. PX4: A node-based multithreaded open source robotics framework for deeply embedded platforms. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; Volume 2015, pp. 6235–6240. [Google Scholar] [CrossRef]
- Github. C++ Navigation Libraries. 2021. Available online: https://github.com/ArduPilot/ardupilot/tree/master/Rover (accessed on 1 April 2022).
- Savage, P.G. Strapdown Inertial Navigation Integration Algorithm Design Part 2: Velocity and Position Algorithms. J. Guid. Control. Dyn. 1998, 21, 208–221. [Google Scholar] [CrossRef]
- Fernandes, M.; Vinha, S.; Paiva, L.; Fontes, F. L0 and L1 Guidance and Path-Following Control for Airborne Wind Energy Systems. Energies 2022, 15, 1390. [Google Scholar] [CrossRef]
- Park, S.; Deyst, J.; How, J. A New Nonlinear Guidance Logic for Trajectory Tracking. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Monterey, CA, USA, 5–8 August 2004. [Google Scholar] [CrossRef]
- Zomrawi, N.; Mohammed, H. Positional Accuracy Testing of Google Earth. Int. J. Multidiscip. Sci. Eng. 2013, 4, 2045–7057. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part | Qty | Type | Cost (€) | Total (€) |
|---|---|---|---|---|
| ZED-F9P | 3 | GPS | 180 | 540 |
| ICM | 3 | IMU | 30 | 90 |
| STM32 | 1 | CPU | 30 | 30 |
| RF | 3 | ANT | 12 | 36 |
| Total cost for the system | 696 | |||
| Test | (cm) | (cm) | (°) |
|---|---|---|---|
| 1 | 12.20 | 15.20 | 0.10 |
| 2 | 12.50 | 15.10 | 0.12 |
| 3 | 12.40 | 14.40 | 0.20 |
| 4 | 13.10 | 14.00 | 0.12 |
| 5 | 12.90 | 14.00 | 0.17 |
| 6 | 13.8 | 13.90 | 0.11 |
| 7 | 12.00 | 13.50 | 0.20 |
| 8 | 18.85 | 19.43 | 0.20 |
| 9 | 13.5 | 15.00 | 0.17 |
| 10 | 12.90 | 15.60 | 0.12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Galati, R.; Mantriota, G.; Reina, G. RoboNav: An Affordable Yet Highly Accurate Navigation System for Autonomous Agricultural Robots. Robotics 2022, 11, 99. https://doi.org/10.3390/robotics11050099
Galati R, Mantriota G, Reina G. RoboNav: An Affordable Yet Highly Accurate Navigation System for Autonomous Agricultural Robots. Robotics. 2022; 11(5):99. https://doi.org/10.3390/robotics11050099
Chicago/Turabian StyleGalati, Rocco, Giacomo Mantriota, and Giulio Reina. 2022. "RoboNav: An Affordable Yet Highly Accurate Navigation System for Autonomous Agricultural Robots" Robotics 11, no. 5: 99. https://doi.org/10.3390/robotics11050099
APA StyleGalati, R., Mantriota, G., & Reina, G. (2022). RoboNav: An Affordable Yet Highly Accurate Navigation System for Autonomous Agricultural Robots. Robotics, 11(5), 99. https://doi.org/10.3390/robotics11050099