
Collision Avoidance for Redundant 7-DOF Robots Using a Critically Damped Dynamic Approach



Abstract
:1. Introduction
2. Critically Damped Collision Avoidance
3. SRS-Type Redundant Robot Benchmark
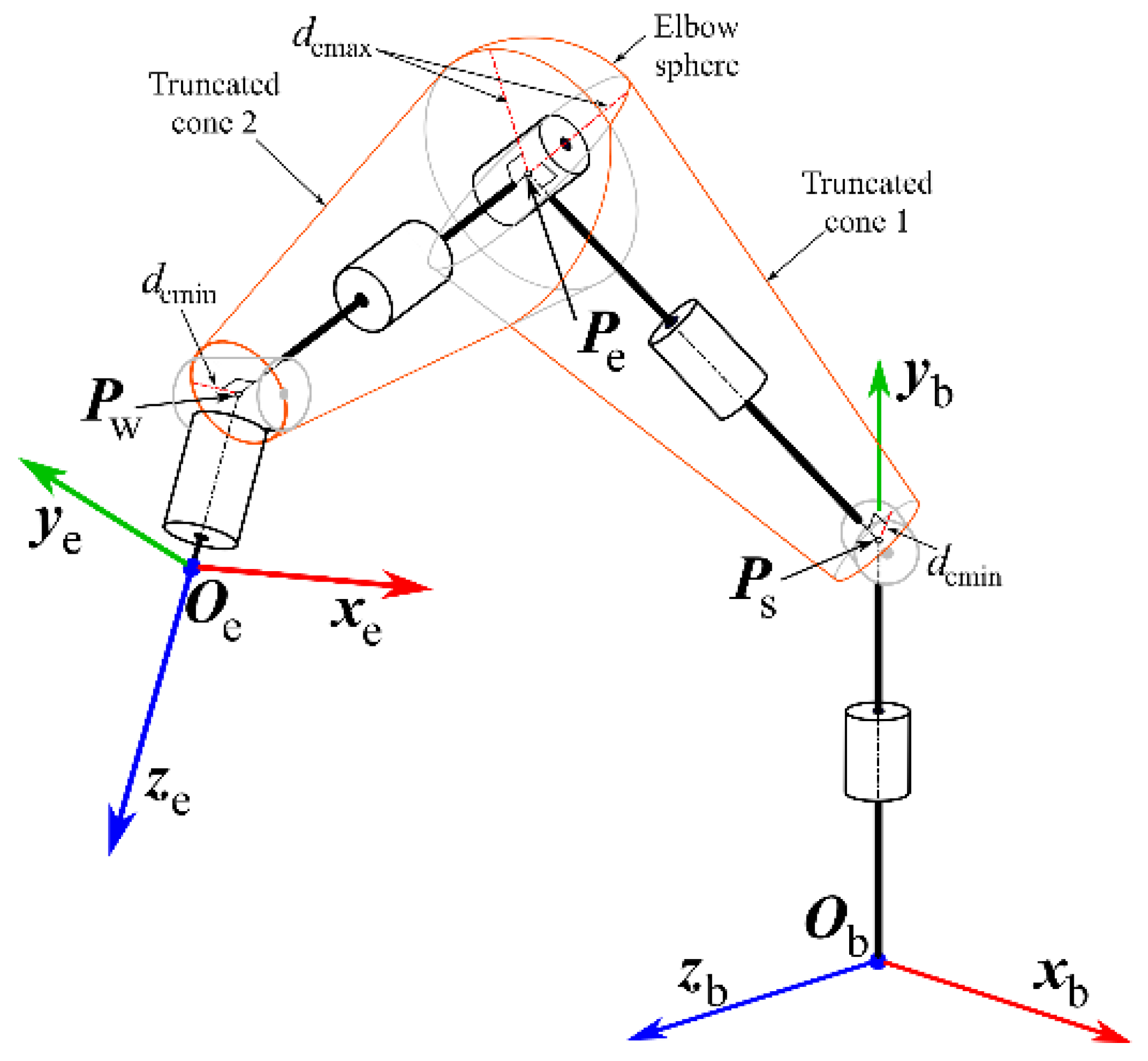
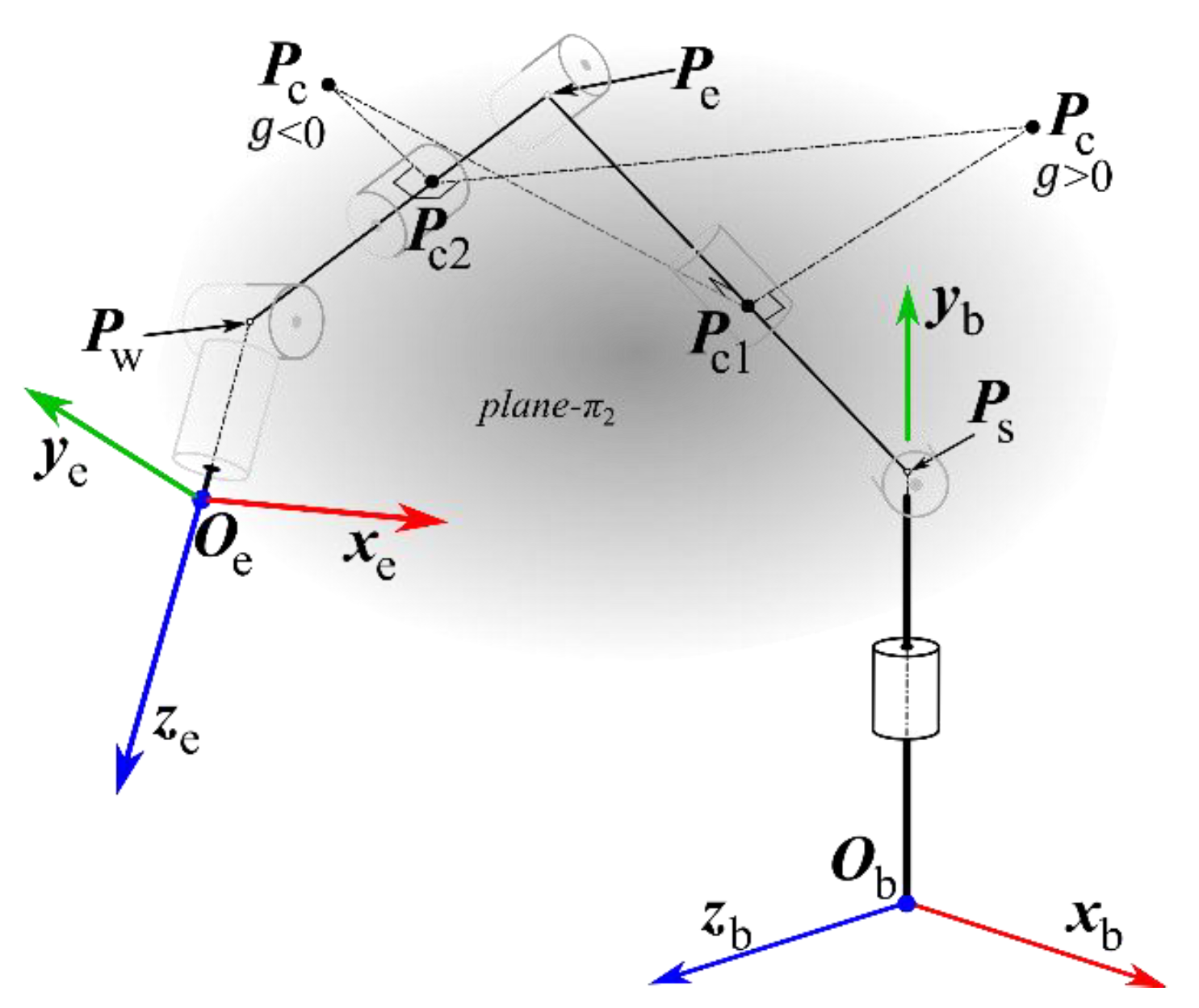
3.1. Geometric Description
3.2. An Analytical Approach to Solve the Inverse Kinematics of SRS-Type Redundant Robots
4. Proposition of an Algorithm for Calculating the Distance between a Point and the Robot
4.1. Typical Strategy for Collision Avoidance
4.2. Proposition of a New Approach for Obstacle Measurement
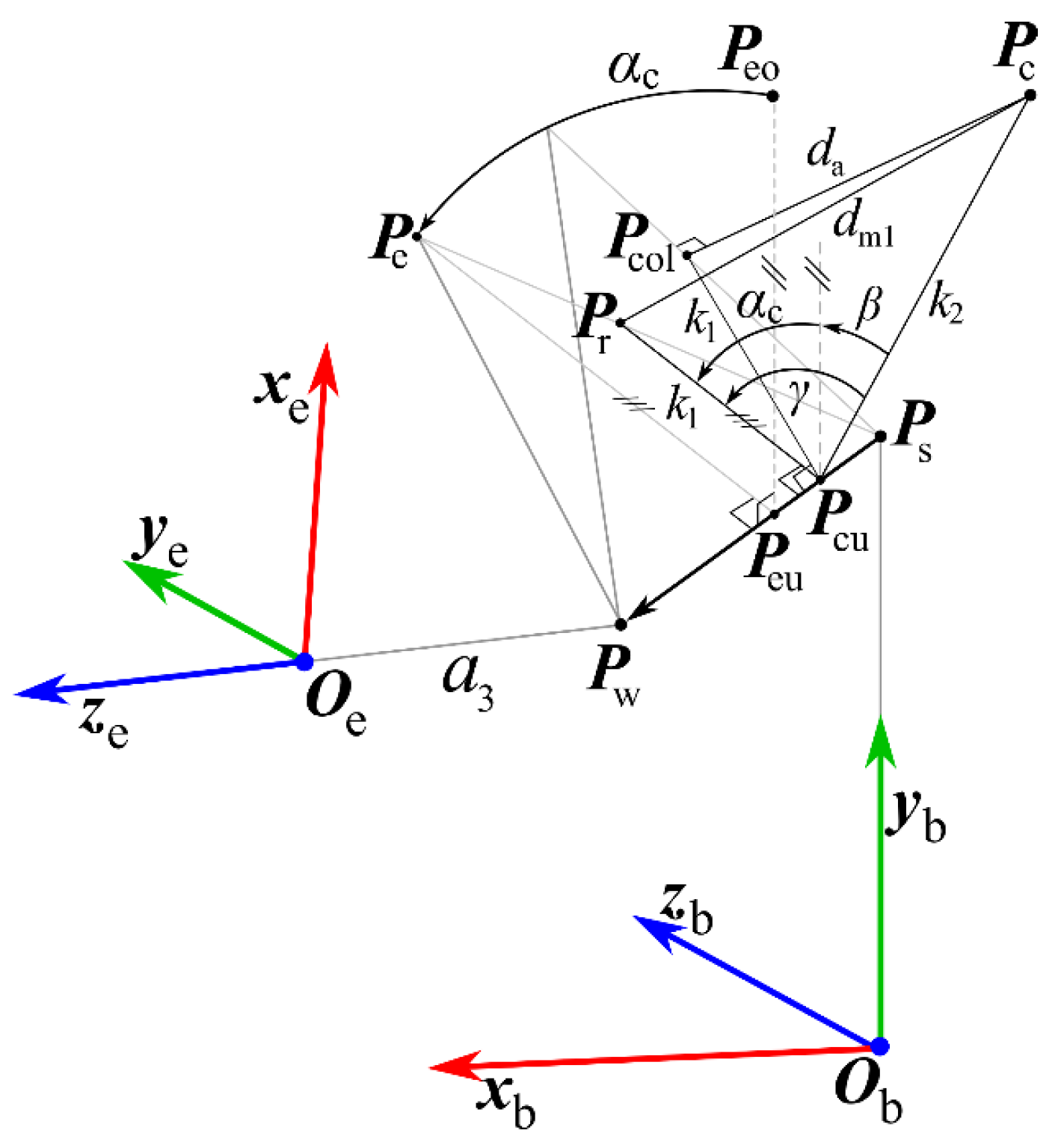
4.3. Computing the Minimum Distance and Respective Collision-Avoidance Angle α
| Algorithm 1. Computation of angle at the nth iteration. | |
| 1 | Input |
| 2 | Desired position and orientation of the end-effector at the iteration n; |
| 3 | Compute the inverse kinematics for αc = 0 rad; |
| 4 | Coordinates of the points belonging to the referential links and relevant points % In this development Ps, Pe and Pw |
| 5 | |
| 6 | Pc % Coordinates of a possible collision point |
| 7 | find← false; % Boolean variable to indicate if a collision point exists inside safety volume. |
| 8 | dmc← 0; % Initializing the minimum of the minimal distances. |
| 9 | Pcol← []; % Point in the kinematic chain with the minor distance to Pc. |
| 10 | Compute u1 and u2; |
| 11 | if then % Pc1 is between Ps and Pe |
| 12 | ; |
| 13 | ; |
| 14 | if da < dm1 then |
| 15 | dmc←dm1; % saving the minimal allowed distance |
| 16 | Pcol← Pc1; % saving the point on the kinematic chain |
| 17 | find← true; |
| end | |
| 18 | elseif then % Pc2 is between Pe and Pw |
| 19 | ; |
| 20 | ; |
| 21 | if dc < dm2 then |
| 22 | if dc < da then |
| 23 | dmc←dm2; % saving the minimal distance |
| 24 | Pcol← Pc2; % saving the point on the kinematic chain |
| 25 | find← true; |
| end if | |
| end if | |
| end if | |
| 26 | ; % evaluating the collision distance from Pcto the point Pe |
| 27 | ifdb<dcmaxthen % considering a sphere as safety region around Pe–see Figure 2 |
| 28 | if find=false then; |
| 29 | dmc←db; |
| 30 | Pcol← Pe; |
| 31 | find← true; |
| 32 | elseif db<dmc then |
| 33 | dmc←db; |
| 34 | Pcol← Pe; |
| end if | |
| end if | |
| 35 | if find=false % if there is no need to avoid collision |
| 36 | rad; |
| 37 | dmc=0; |
| else % computing the value of to move the robot away from the collision point. | |
| 38 | Compute γ and β; |
| 39 | ; |
| end if | |
| 40 | ; % Equation (3) |
| 41 | Solve inverse kinematics using ; |
| 42 | Output Save joint positions; |
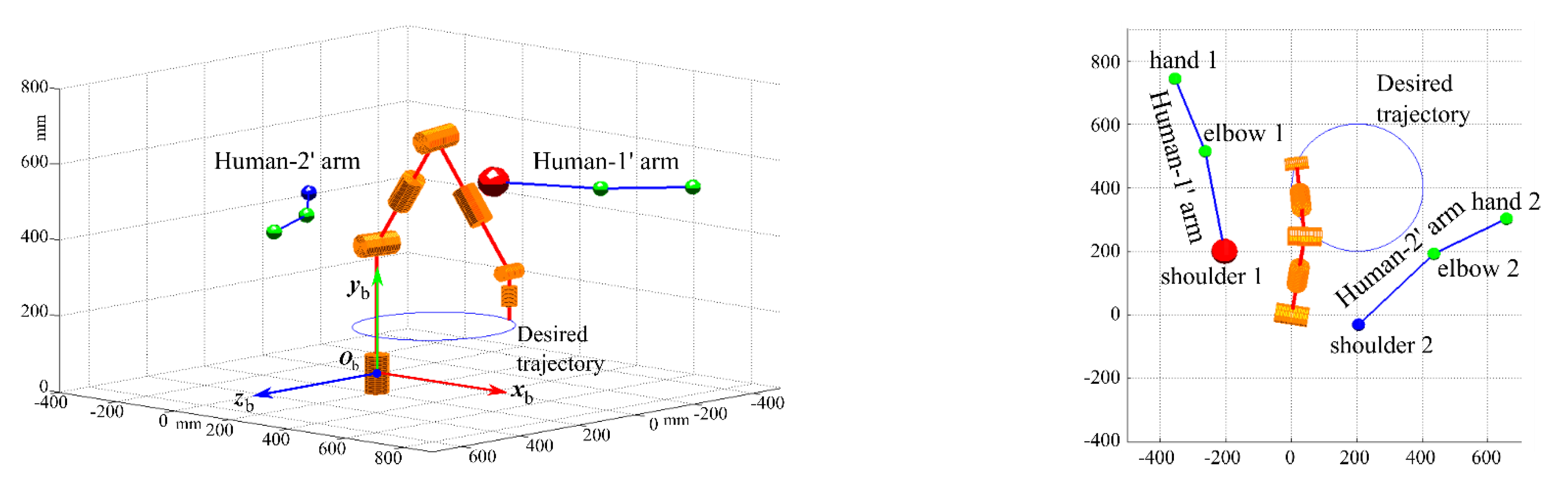
5. Graphical Results
6. Discussions
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mihelj, M.; Bajd, T.; Ude, A.; Lenarcic, J.; Stanovnik, A.; Munih, M.; Rejc, J.; Šlajpah, S. Robotics, 2nd ed.; Springer: Cham, Switzerland, 2018. [Google Scholar] [CrossRef]
- Matheson, E.; Minto, R.; Zampieri, E.G.G.; Faccio, M.; Rosati, G. Human–Robot Collaboration in Manufacturing Applications: A Review. Robotics 2019, 8, 100. [Google Scholar] [CrossRef]
- El Zaatari, S.; Marei, M.; Li, W.; Usman, Z. Cobot Programming for Collaborative Industrial Tasks: An Overview. Robot. Auton. Syst. 2019, 116, 162–180. [Google Scholar] [CrossRef]
- Safeea, M.; Neto, P.; Bearee, R. On-Line Collision Avoidance for Collaborative Robot Manipulators by Adjusting off-Line Generated Paths: An Industrial Use Case. Robot. Auton. Syst. 2019, 119, 278–288. [Google Scholar] [CrossRef]
- Alebooyeh, M.; Urbanic, R.J. Neural Network Model for Identifying Workspace, Forward and Inverse Kinematics of the 7-DOF YuMi 14000 ABB Collaborative Robot. IFAC-PapersOnLine 2019, 52, 176–181. [Google Scholar] [CrossRef]
- IFR. A Positioning Paper: Demystifying Collaborative Industrial Robots; International Federation of Robotics: Frankfurt, Germany, 2018; pp. 1–5. [Google Scholar]
- ISO/TS 15066:2016; Robots and Robotic Devices—Collaborative Robots. ISO: Geneva, Switzerland, 2016.
- Busson, D.; Bearee, R.; Olabi, A. Task-Oriented Rigidity Optimization for 7 DOF Redundant Manipulators. IFAC-PapersOnLine 2017, 50, 14588–14593. [Google Scholar] [CrossRef]
- Liu, W.; Chen, D.; Steil, J. Analytical Inverse Kinematics Solver for Anthropomorphic 7-DOF Redundant Manipulators with Human-Like Configuration Constraints. J. Intell. Robot. Syst. Theory Appl. 2017, 86, 63–79. [Google Scholar] [CrossRef]
- Zhang, L.; Xiao, N. A Novel Artificial Bee Colony Algorithm for Inverse Kinematics Calculation of 7-DOF Serial Manipulators. Soft Comput. 2019, 23, 3269–3277. [Google Scholar] [CrossRef]
- Liu, M.C.; Tsai, H.H.; Hsiao, T. Kinematics-Based Studies on a 7-DOF Redundant Manipulator. In Proceedings of the 2014 CACS International Automatic Control Conference (CACS 2014), Kaohsiung, Taiwan, 26–28 November 2014; pp. 228–231. [Google Scholar] [CrossRef]
- Di Gregorio, R.; Simas, H. Dimensional Synthesis of the Single-Loop Translational Parallel Manipulator PRRR-PRPU. Meccanica 2018, 53, 481–495. [Google Scholar] [CrossRef]
- Simas, H.; Martins, D.; Di Gregorio, R. Smooth Path Planning for Redundant Robots on Collision Avoidance. In Mechanisms and Machine Science; Springer: Cham, Switzerland, 2019; Volume 73, pp. 1869–1878. [Google Scholar] [CrossRef]
- Simas, H.; Guenther, R.; Da Cruz, D.F.M.; Martins, D. A New Method to Solve Robot Inverse Kinematics Using Assur Virtual Chains. Robotica 2009, 27, 1017–1026. [Google Scholar] [CrossRef]
- Rouhani, M.; Ebrahimabadi, S. Inverse Kinematics of a 7-DOF Redundant Robot Manipulator Using the Active Set Approach under Joint Physical Limits. Turk. J. Electr. Eng. Comput. Sci. 2017, 25, 3920–3931. [Google Scholar] [CrossRef]
- Osa, T. Multimodal Trajectory Optimization for Motion Planning. Int. J. Robot. Res. 2020, 39, 983–1001. [Google Scholar] [CrossRef]
- Dereli, S.; Köker, R. Calculation of the Inverse Kinematics Solution of the 7-DOF Redundant Robot Manipulator by the Firefly Algorithm and Statistical Analysis of the Results in Terms of Speed and Accuracy. Inverse Probl. Sci. Eng. 2020, 28, 601–613. [Google Scholar] [CrossRef]
- Ayten, K.K.; Sahinkaya, M.N.; Dumlu, A. Real Time Optimum Trajectory Generation for Redundant/Hyper-Redundant Serial Industrial Manipulators. Int. J. Adv. Robot. Syst. 2017, 14, 172988141773724. [Google Scholar] [CrossRef]
- Siciliano, B. Kinematic Control of Redundant Robot Manipulators: A Tutorial. J. Intell. Robot. Syst. 1990, 3, 201–212. [Google Scholar] [CrossRef]
- Quispe, A.H.; Stilman, M. Deterministic Motion Planning for Redundant Robots along End-Effector Paths. In Proceedings of the 2012 12th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2012), Osaka, Japan, 29 November–1 December 2012; pp. 785–790. [Google Scholar] [CrossRef]
- Zanchettin, A.M.; Rocco, P. A General User-Oriented Framework for Holonomic Redundancy Resolution in Robotic Manipulators Using Task Augmentation. IEEE Trans. Robot. 2012, 28, 514–521. [Google Scholar] [CrossRef]
- Klein, C.A.; Huang, C.H. Review of Pseudoinverse Control for Use with Kinematically Redundant Manipulators. IEEE Trans. Syst. Man Cybern. 1983, SMC-13, 245–250. [Google Scholar] [CrossRef]
- Kalakrishnan, M.; Chitta, S.; Theodorou, E.; Pastor, P.; Schaal, S. STOMP: Stochastic Trajectory Optimization for Motion Planning. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 4569–4574. [Google Scholar] [CrossRef]
- Besset, P.; Béarée, R. FIR Filter-Based Online Jerk-Constrained Trajectory Generation. Control Eng. Pract. 2017, 66, 168–180. [Google Scholar] [CrossRef]
- Gerelli, O.; Guarino Lo Bianco, C. A Discrete-Time Filter for the on-Line Generation of Trajectories with Bounded Velocity, Acceleration, and Jerk. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 3989–3994. [Google Scholar] [CrossRef]
- Biagiotti, L.; Melchiorri, C. Online Trajectory Planning and Filtering for Robotic Applications via B-Spline Smoothing Filters. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 5668–5673. [Google Scholar] [CrossRef]
- Preiss, J.A.; Hausman, K.; Sukhatme, G.S.; Weiss, S. Simultaneous Self-Calibration and Navigation Using Trajectory Optimization. Int. J. Robot. Res. 2018, 37, 1573–1594. [Google Scholar] [CrossRef]
- Franklin, G.F.; Powell, J.D.; Emami-Naeini, A. Feedback Control of Dynamic Systems, 8th ed.; Pearson: London, UK, 2019. [Google Scholar]
- Colome, A.; Torras, C. Redundant Inverse Kinematics: Experimental Comparative Review and Two Enhancements. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 5333–5340. [Google Scholar] [CrossRef]
- Siciliano, B.; Lorenzo, S.; Villani, L.; Orilo, G. Robotics: Modelling, Planning and Control, 2nd ed.; Springer: London, UK, 2010. [Google Scholar]
- Tsai, L.-W. Robot Analysis and Design: The Mechanics of Serial and Parallel Manipulators, 1st ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1999. [Google Scholar]
- Dereli, S.; Köker, R. A Meta-Heuristic Proposal for Inverse Kinematics Solution of 7-DOF Serial Robotic Manipulator: Quantum Behaved Particle Swarm Algorithm. Artif. Intell. Rev. 2020, 53, 949–964. [Google Scholar] [CrossRef]
- Mooney, J.G.; Johnson, E.N. A Comparison of Automatic Nap-of-the-Earth Guidance Strategies for Helicopters. J. Field Robot. 2014, 33, 1–17. [Google Scholar] [CrossRef]
- Zhao, S.; Zhu, Z.; Luo, J. Multitask-Based Trajectory Planning for Redundant Space Robotics Using Improved Genetic Algorithm. Appl. Sci. 2019, 9, 2226. [Google Scholar] [CrossRef]
- Ogura, Y.; Aikawa, H.; Shimomura, K.; Kondo, H.; Morishima, A.; Lim, H.O.; Takanishi, A. Development of a New Humanoid Robot WABIAN-2. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 76–81. [Google Scholar] [CrossRef]
- Starke, S.; Hendrich, N.; Krupke, D.; Zhang, J. Evolutionary Multi-Objective Inverse Kinematics on Highly Articulated and Humanoid Robots. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 6959–6966. [Google Scholar] [CrossRef]
- Lim, J.; Oh, J.-H. Backward Ladder Climbing Locomotion of Humanoid Robot with Gain Overriding Method on Position Control. J. Field Robot. 2016, 33, 687–705. [Google Scholar] [CrossRef]
- Faria, C.; Ferreira, F.; Erlhagen, W.; Monteiro, S.; Bicho, E. Position-Based Kinematics for 7-DoF Serial Manipulators with Global Configuration Control, Joint Limit and Singularity Avoidance. Mech. Mach. Theory 2018, 121, 317–334. [Google Scholar] [CrossRef]
- Wang, Y.; Artemiadis, P. Closed-Form Inverse Kinematic Solution for Anthropomorphic Motion in Redundant Robot Arms. Adv. Robot. Autom. 2013, 2(3), 1000110. [Google Scholar] [CrossRef]
- Simas, H.; Di Gregorio, R. Position Analysis, Singularity Loci and Workspace of a Novel 2PRPU Schoenflies-Motion Generator. Robotica 2019, 37, 141–160. [Google Scholar] [CrossRef]
- Simas, H.; Di Gregorio, R. Kinetostatics and Optimal Design of a 2PRPU Shoenflies-Motion Generator. In Mechanisms and Machine Science; Springer Cham: Cham, Switzerland, 2017; Volume 54. [Google Scholar] [CrossRef]
- Mohammed, A.; Schmidt, B.; Wang, L. Active Collision Avoidance for Human–Robot Collaboration Driven by Vision Sensors. Int. J. Comput. Integr. Manuf. 2017, 30, 970–980. [Google Scholar] [CrossRef]
- Süli, E.; Mayers, D.F. An Introduction to Numerical Analysis; Cambridge University Press: New York, NY, USA, 2003. [Google Scholar] [CrossRef]
- Luo, R.C.; Ko, M.C.; Chung, Y.T.; Chatila, R. Repulsive Reaction Vector Generator for Whole-Arm Collision Avoidance of 7-DoF Redundant Robot Manipulator. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besacon, France, 8–11 July 2014; pp. 1036–1041. [Google Scholar] [CrossRef]
- KUKA Sensitive Robotics: LBR iiwa. Catalog published by KUKA Roboter GmbH: Augsburg, Germany. 2016. Available online: https://pdf.directindustry.com/pdf/kuka-ag/kuka-sensitive-robotics-lbr-iiwa/17587-724449.html (accessed on 9 July 2022).
- Huber, G.; Wollherr, D. Efficient Closed-Form Task Space Manipulability for a 7-DOF Serial Robot. Robotics 2019, 8, 98. [Google Scholar] [CrossRef] [Green Version]
- Larson, R.; Edwards, B.H. Multivariable Calculus, 9th ed.; Cengage Learning: Boston, MA, USA, 2009. [Google Scholar]
- Herrera Pineda, J.C.; Mejia Rincon, L.; Simoni, R.; Simas, H. Maximum Isotropic Force Capability Maps in Planar Cooperative Systems: A Practical Case Study. In Mechanisms and Machine Science; Springer: Cham, Switzerland, 2018; Volume 54, pp. 160–170. [Google Scholar] [CrossRef]
- Oh, J.; Bae, H.; Oh, J.H. Analytic Inverse Kinematics Considering the Joint Constraints and Self-Collision for Redundant 7DOF Manipulator. In Proceedings of the 2017 First IEEE International Conference on Robotic Computing (IRC), Taichung, Taiwan, 10–12 April 2017; pp. 123–128. [Google Scholar] [CrossRef]
- Video that presents the complete simulation experiment. Available online: https://youtu.be/BfRjA8dgnq8 (accessed on 9 July 2022).
- Frantz, J.C.; Rincon, L.M.; Simas, H.; Martins, D. Wrench Distribution of a Cooperative Robotic System Using a Modified Scaling Factor Method. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 177. [Google Scholar] [CrossRef]
- Zhou, D.; Ji, L.; Zhang, Q.; Wei, X. Practical Analytical Inverse Kinematic Approach for 7-DOF Space Manipulators with Joint and Attitude Limits. Intell. Serv. Robot. 2015, 8, 215–224. [Google Scholar] [CrossRef]
- Scimmi, L.S.; Melchiorre, M.; Mauro, S.; Pastorelli, S. Multiple Collision Avoidance between Human Limbs and Robot Links Algorithm in Collaborative Tasks. In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics, Porto, Portugal, 29–31 July 2018; pp. 291–298. [Google Scholar] [CrossRef]
- Karimi, G.; Jahanian, O. Genetic Algorithm Application in Swing Phase Optimization of AK Prosthesis with Passive Dynamics and Biomechanics Considerations. In Genetic. Algorithms Application; Intechopen: London, UK, 2012; pp. 71–88. [Google Scholar] [CrossRef]
- Xu, Z.; Gan, Y.; Dai, X. Obstacle Avoidance of 7-DOF Redundant Manipulators. In Proceedings of the 2019 Chinese Control And Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 4184–4189. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Human-Arm 1 | Human-Arm 2 | |
|---|---|---|
| Base (shoulder) | [−50 500 250]T mm | [150 500 −200]T mm |
| Base rotation radius (around y-axis) | 50 mm | 50 mm |
| Base number of turns | 5 | 11 |
| Shoulder angle range | 0.4 rad | 0.4 rad |
| Shoulder angle offset | 0.4 rad | 0.2 rad |
| Shoulder number of turns | 9 | 13 |
| Elbow angle range | 0.4 rad | 0.4 rad |
| Elbow angle offset | 0.4 rad | 0 rad |
| Elbow number of turns | 7 | 9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Simas, H.; Di Gregorio, R. Collision Avoidance for Redundant 7-DOF Robots Using a Critically Damped Dynamic Approach. Robotics 2022, 11, 93. https://doi.org/10.3390/robotics11050093
Simas H, Di Gregorio R. Collision Avoidance for Redundant 7-DOF Robots Using a Critically Damped Dynamic Approach. Robotics. 2022; 11(5):93. https://doi.org/10.3390/robotics11050093
Chicago/Turabian StyleSimas, Henrique, and Raffaele Di Gregorio. 2022. "Collision Avoidance for Redundant 7-DOF Robots Using a Critically Damped Dynamic Approach" Robotics 11, no. 5: 93. https://doi.org/10.3390/robotics11050093
APA StyleSimas, H., & Di Gregorio, R. (2022). Collision Avoidance for Redundant 7-DOF Robots Using a Critically Damped Dynamic Approach. Robotics, 11(5), 93. https://doi.org/10.3390/robotics11050093