
Modeling and Analysis of a High-Speed Adjustable Grasping Robot Controlled by a Pneumatic Actuator


Abstract
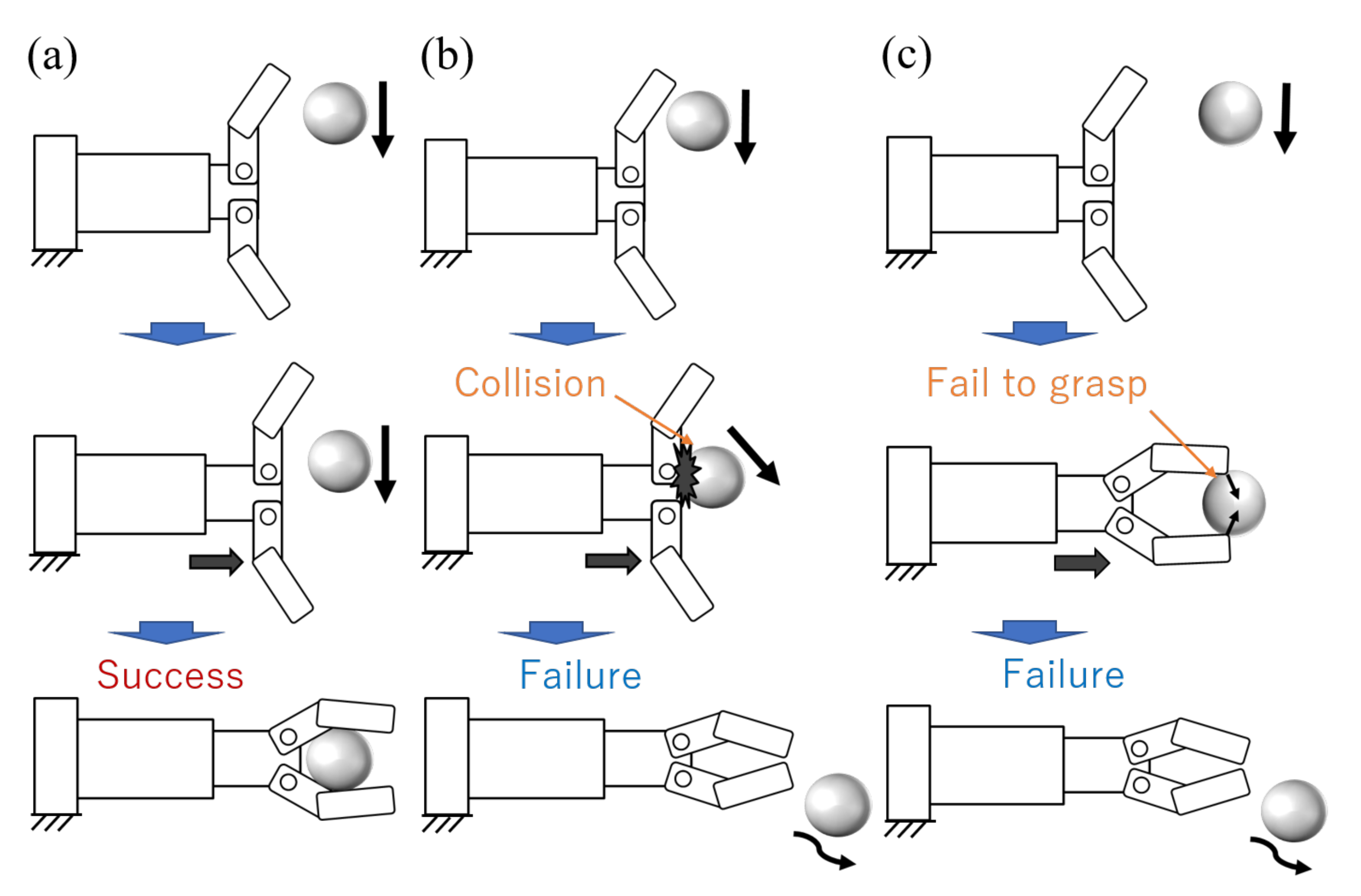
1. Introduction
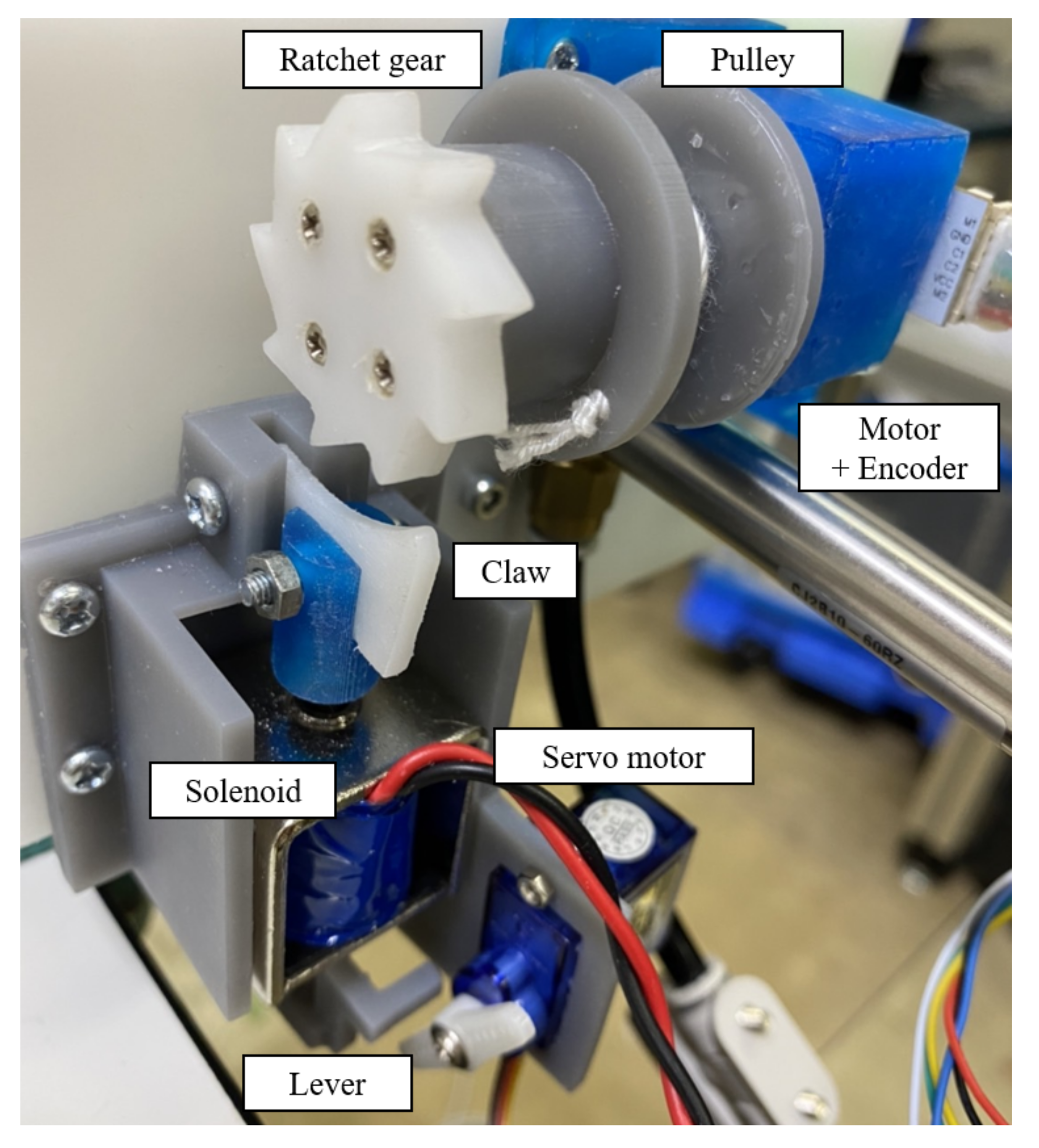
2. Design of the Proposed Robot
3. Modeling of Mechanism
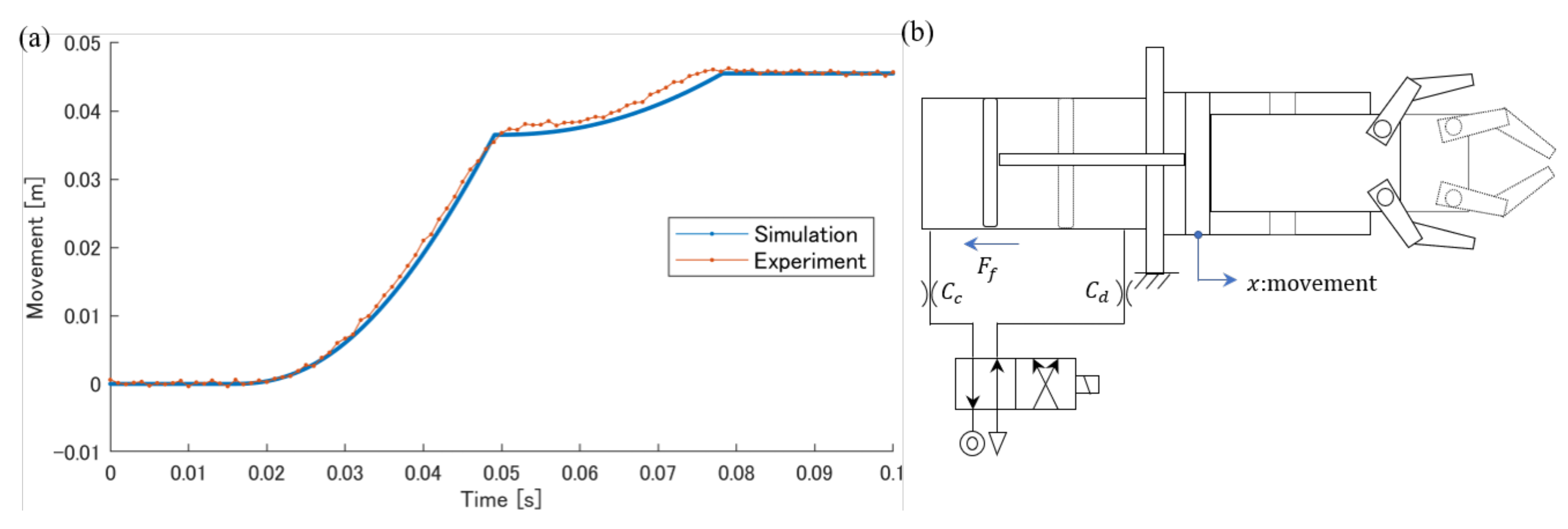
3.1. Modeling of the Driving Part
3.2. Modeling of Gripper Part
4. Evaluation Experiments
4.1. Experimental Setup
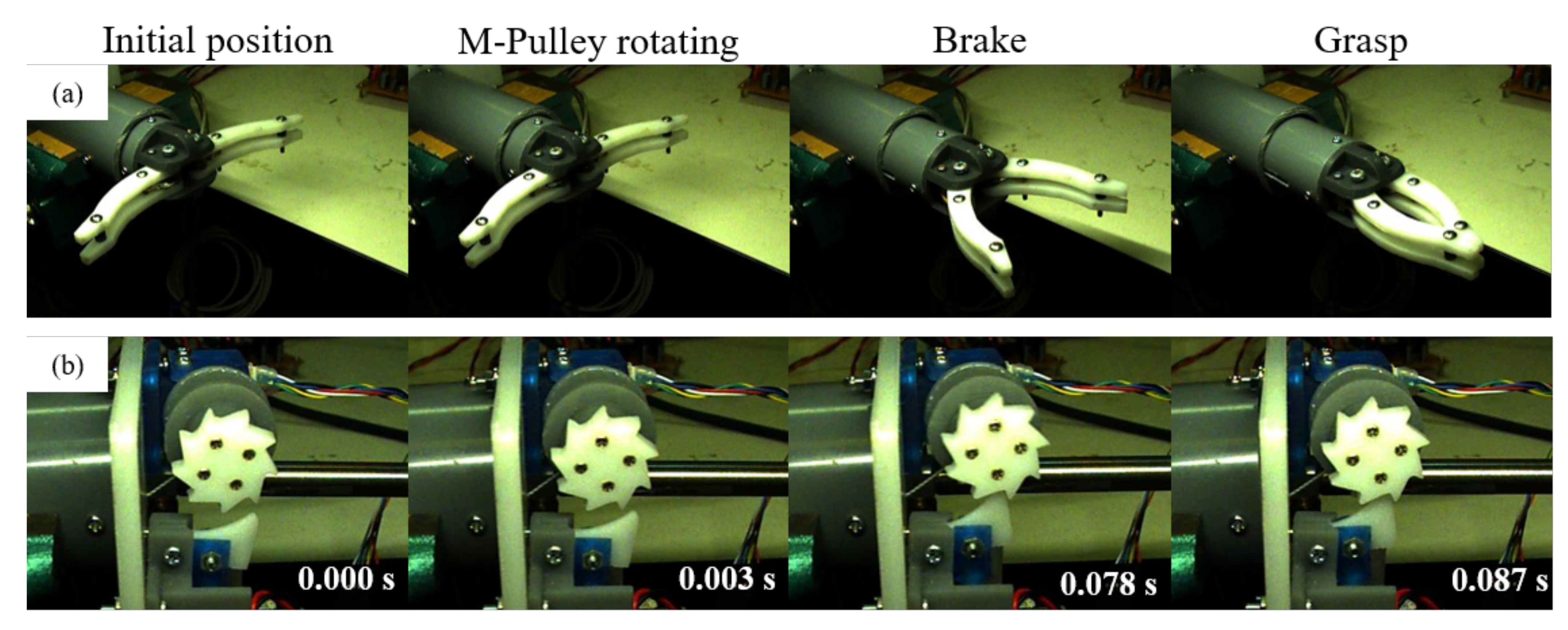
4.2. Evaluation of the Developed High-Speed Grasping Robot Model
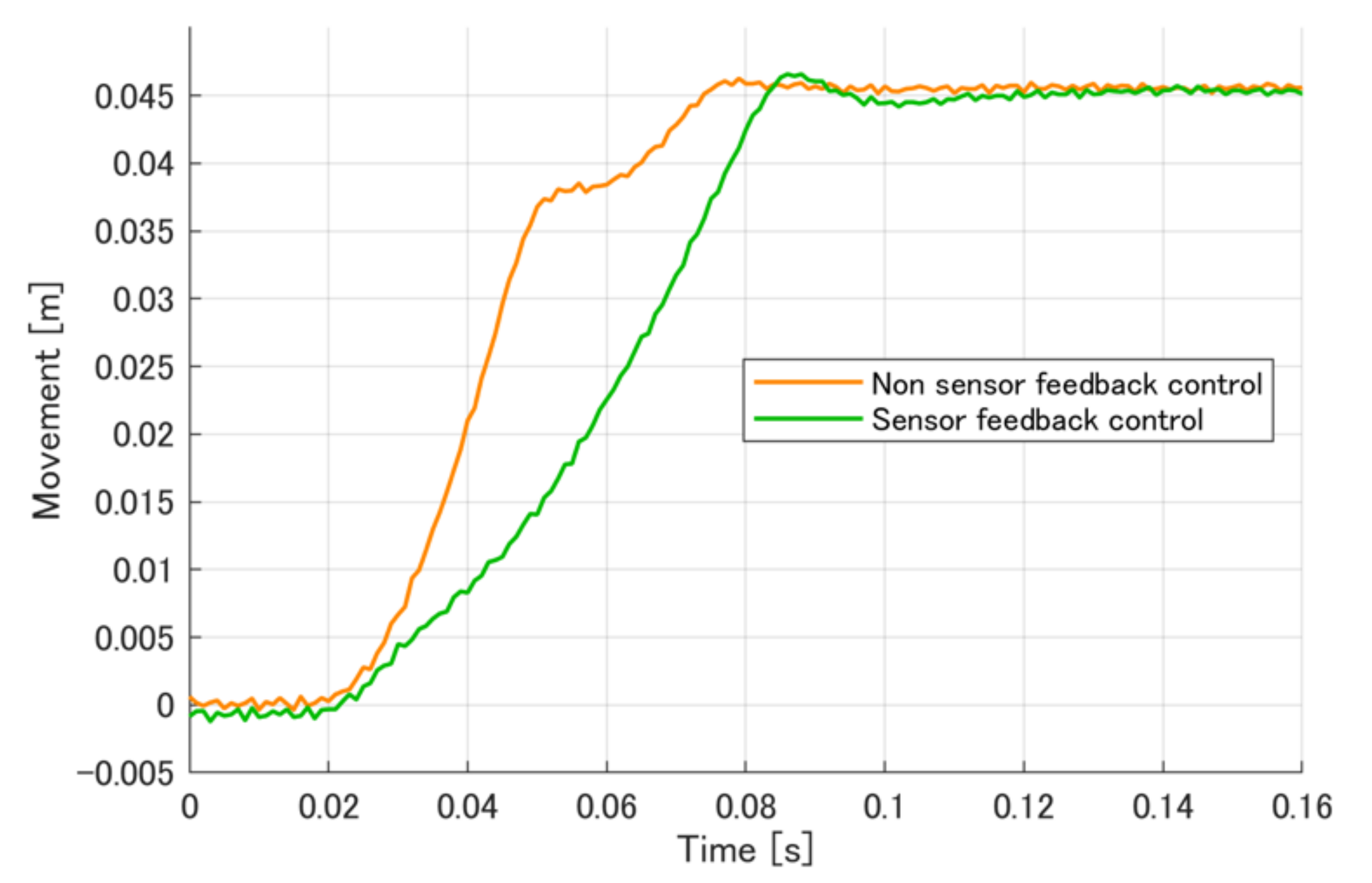
4.3. Verification of the Sensor Feedback Control of the High-Speed Grasping Robot
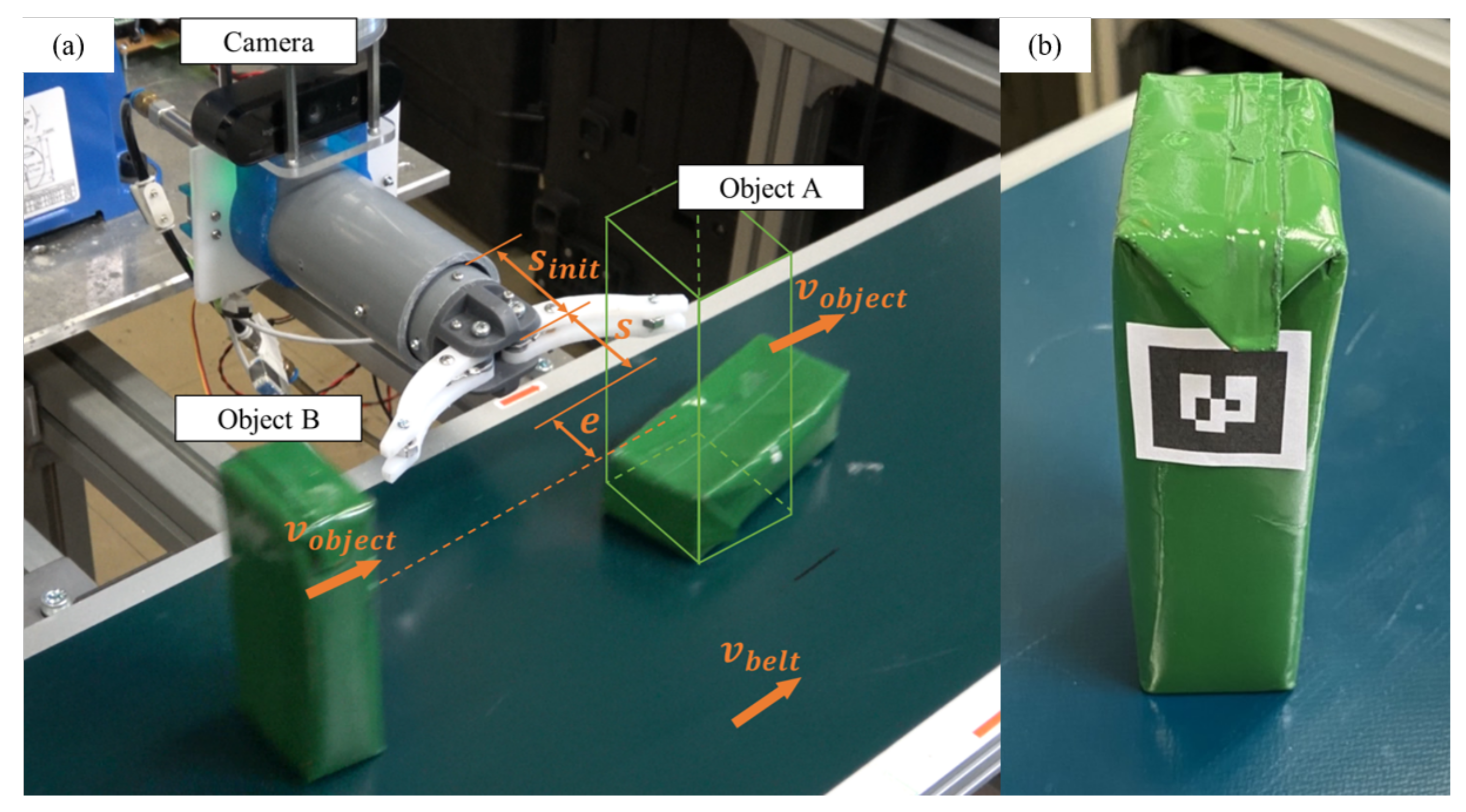
4.4. Experiment to Grasp Moving Objects on a Belt Conveyor
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Namiki, A.; Imai, Y.; Ishikawa, M.; Kaneko, M. Development of a High-speed Multifingered Hand System and Its Application to Catching. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 27–31 October 2003; pp. 2666–2671. [Google Scholar]
- Namiki, A.; Imai, Y.; Ishikawa, M.; Kaneko, M.; Kameda, H.; Koyama, J. Dynamic Catching Using a Ultra-High-Speed Multifingerd Hand System. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (ICRA) Video Proceedings, Abstracts & References, Taipei, Taiwan, 13 September 2003; pp. 28–29. [Google Scholar]
- Kizaki, T.; Namiki, A. Two Ball Juggling with High-Speed Hand-Arm and High-Speed Vision System. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012; pp. 1372–1377. [Google Scholar]
- Namiki, A.; Itoi, N. Ball Catching in Kendama Game by Estimating Grasp Conditions Based on a High-Speed Vision System and Tactile Sensors. In Proceedings of the 2014 IEEE-RAS International Conference on Humanoid Robots (Humanoids), Madrid, Spain, 18–20 November 2014; pp. 634–639. [Google Scholar]
- Yamakawa, Y.; Namiki, A.; Ishikawa, M. Simple Model and Deformation Control of a Flexible Rope using Constant, High-Speed Motion of a Robot Arm. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012; pp. 2249–2254. [Google Scholar]
- Takaki, T.; Omata, T. High Performance Anthropomorpic Prosthetic Hand with Grasp force Magnification Mechanism. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 12–17 May 2009; pp. 1697–1703. [Google Scholar]
- Takayama, T.; Chiba, Y.; Omata, T. Tokyo-TECH 100N Hand: Three-fingered eight-DOF hand with a force-magnification mechanism. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 12–17 May 2009; pp. 593–598. [Google Scholar]
- Koyama, K.; Shimojo, M.; Senno, T.; Ishikawa, M. High-Speed High-Precision Proximity Sensor for Detection of Tilt, Distance and Contact. IEEE Robot. Autom. Lett. 2018, 3, 3224–3231. [Google Scholar] [CrossRef]
- Chen, C.; Lan, C. An Accurate Force Regulation Mechanism for High-Speed Handling of Fragile Objects Using Pneumatic Grippers. IEEE Trans. Autom. Sci. Eng. 2017, 15, 1600–1608. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Abidi, S.H.; Cianchetti, M.; Laschi, C.; Falotico, E. A bistable soft gripper with mechanically embedded sensing and actuation for fast closed-loop grasping. arXiv 2019, arXiv:1902.04896v1. [Google Scholar]
- Sun, J.; Tighe, B.; Zhao, J. Tuning the Energy Landscape of Soft Robots for Fast and Strong Motion. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 10082–10088. [Google Scholar]
- Higashimori, M.; Kaneko, M.; Namiki, A.; Ishikawa, M. Design of the 100G Capturing Robot Based on Dynamic Preshaping. Int. J. Robot. Res. 2005, 24, 743–753. [Google Scholar] [CrossRef]
- O’Brien, K.W.; Xu, P.A.; Levine, D.J.; Aubin, C.A.; Yang, H.H.; Xiao, M.F.; Wiesner, L.W.; Shepherd, R.F. Elastomeric passive transmission for autonomous force-velocity adaptation applied to 3D-printed prosthetics. Sci. Robot. 2018, 3, eaau5543. [Google Scholar] [CrossRef] [PubMed]
- Hirai, Y.; Suzuki, Y.; Tsuji, T.; Watanabe, T. High-speed and Intelligent Pre-grasp Motion by a Robotic Hand Equipped with Hierarchical Proximity Sensors. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 7424–7431. [Google Scholar]
- Li, J.; Zhang, R.; Mou, L.; Andrade, M.J.D.; Hu, X.; Yu., K.; Sun, J.; Jia, T.; Dou, Y.; Chen, H.; et al. Photothermal Bimorph Actuators with In-Built Cooler for Light Mills, Frequency Switches, and Soft Robots. Adv. Funct. Mater. 2019, 29, 1808995. [Google Scholar] [CrossRef]
- Andronas, D.; Xythalis, S.; Karagiannis, P.; Michalos, G.; Makris, S. Robot gripper with high speed, in-hand object manipulation capabilities. Procedia CIRP 2020, 97, 482–486. [Google Scholar] [CrossRef]
- Yamanaka, Y.; Katagiri, S.; Nabae, H.; Suzumori, K.; Endo, G. Development of a Food Handling Soft Robot Hand Considering a High-speed Pick-and-place Task. In Proceedings of the 2020 IEEE/SICE International Symposium on System Integration (SII), Honolulu, HI, USA, 12–15 January 2020; pp. 87–92. [Google Scholar]
- Kang, T.; Yi, J.-B.; Song, D.; Yi, S.-J. High-Speed Autonomous Robotic Assembly Using In-Hand Manipulation and Re-Grasping. Appl. Sci. 2021, 11, 37. [Google Scholar] [CrossRef]
- Yamakawa, Y.; Katsuki, Y.; Watanabe, Y.; Ishikawa, M. Development of a High-Speed, Low-Latency Telemanipulated Robot Hand System. Robotics 2021, 10, 41. [Google Scholar] [CrossRef]
- Iwazawa, R.; Ohara, K.; Kaneko, M. Development of high-speed gripper with closing and releasing capability. In Proceedings of the 2021 IEEE/SICE International Symposium on System Integration (SII), Iwaki, Fukushima, 11–14 January 2021; pp. 619–622. [Google Scholar]
- Chen, S.; Youn, C.; Kagawa, T.; Cai, M. Transmission and Consumption of Air Power in Pneumatic System. Energy Power Eng. 2014, 6, 487–495. [Google Scholar] [CrossRef]
- Takayama, T.; Kaneko, M.; Tsai, C.-H.D. On-Chip Micro Mixer Driven by Elastic Wall with Virtual Actuator. Micromachines 2021, 12, 217. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | |
|---|---|---|
| L | Length between A and B | 20 mm |
| r | Pulley radius | 6 mm |
| Angle between CA and AB | ||
| Angle between BA and AD | ||
| Spring reaction force | 1.67 N | |
| J | Moment of inertia of gripper | 24.2 kg · mm2 |
| Parameter | Value |
|---|---|
| Mass of the high-speed grasping robot | 1.3 kg |
| Mass of the arm | 0.2 kg |
| Supply pressure | 0.5 MPa |
| Acceleration | 15 × 9.8 m/s2 |
| Arm stroke | 15–45 mm |
| Positioning accuracy of grasping position | 2.5 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ohara, K.; Iwazawa, R.; Kaneko, M. Modeling and Analysis of a High-Speed Adjustable Grasping Robot Controlled by a Pneumatic Actuator. Robotics 2022, 11, 27. https://doi.org/10.3390/robotics11010027
Ohara K, Iwazawa R, Kaneko M. Modeling and Analysis of a High-Speed Adjustable Grasping Robot Controlled by a Pneumatic Actuator. Robotics. 2022; 11(1):27. https://doi.org/10.3390/robotics11010027
Chicago/Turabian StyleOhara, Kenichi, Ryosuke Iwazawa, and Makoto Kaneko. 2022. "Modeling and Analysis of a High-Speed Adjustable Grasping Robot Controlled by a Pneumatic Actuator" Robotics 11, no. 1: 27. https://doi.org/10.3390/robotics11010027
APA StyleOhara, K., Iwazawa, R., & Kaneko, M. (2022). Modeling and Analysis of a High-Speed Adjustable Grasping Robot Controlled by a Pneumatic Actuator. Robotics, 11(1), 27. https://doi.org/10.3390/robotics11010027