
A New Hyperloop Transportation System: Design and Practical Integration

 ,
,
Abstract
:1. Introduction
2. LSM Model and Controller Design
2.1. Modeling of the Linear Synchronous Motor
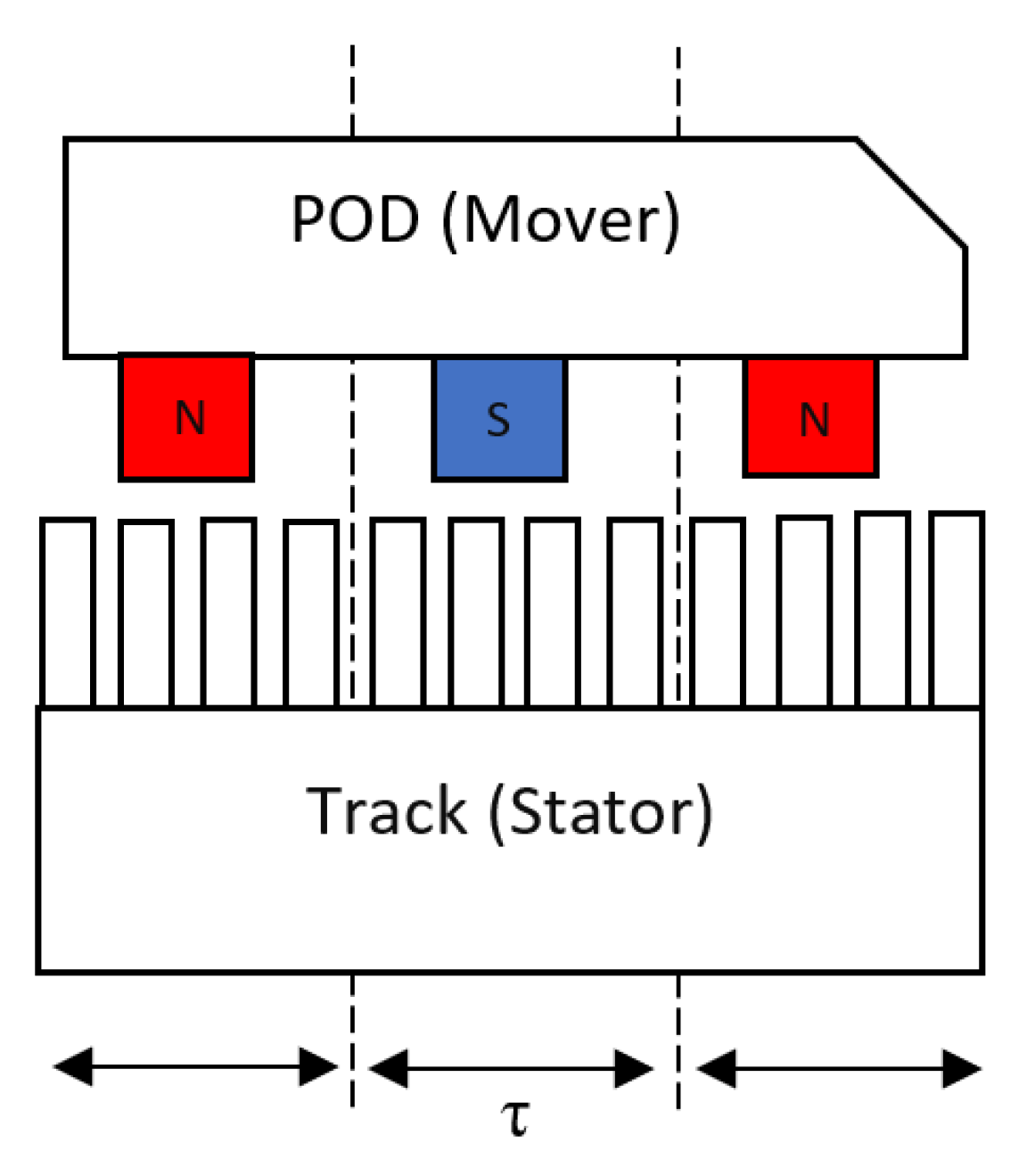
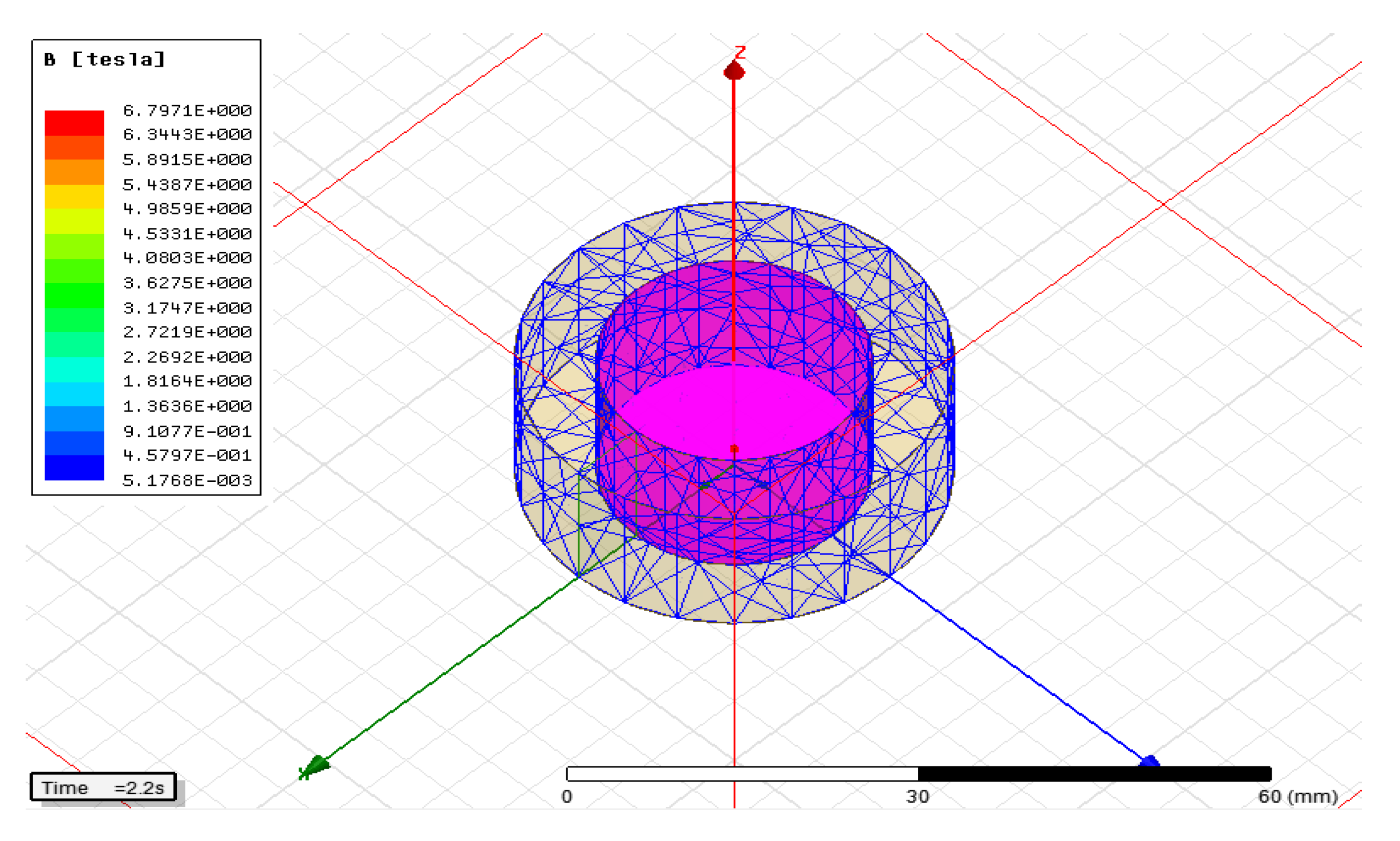
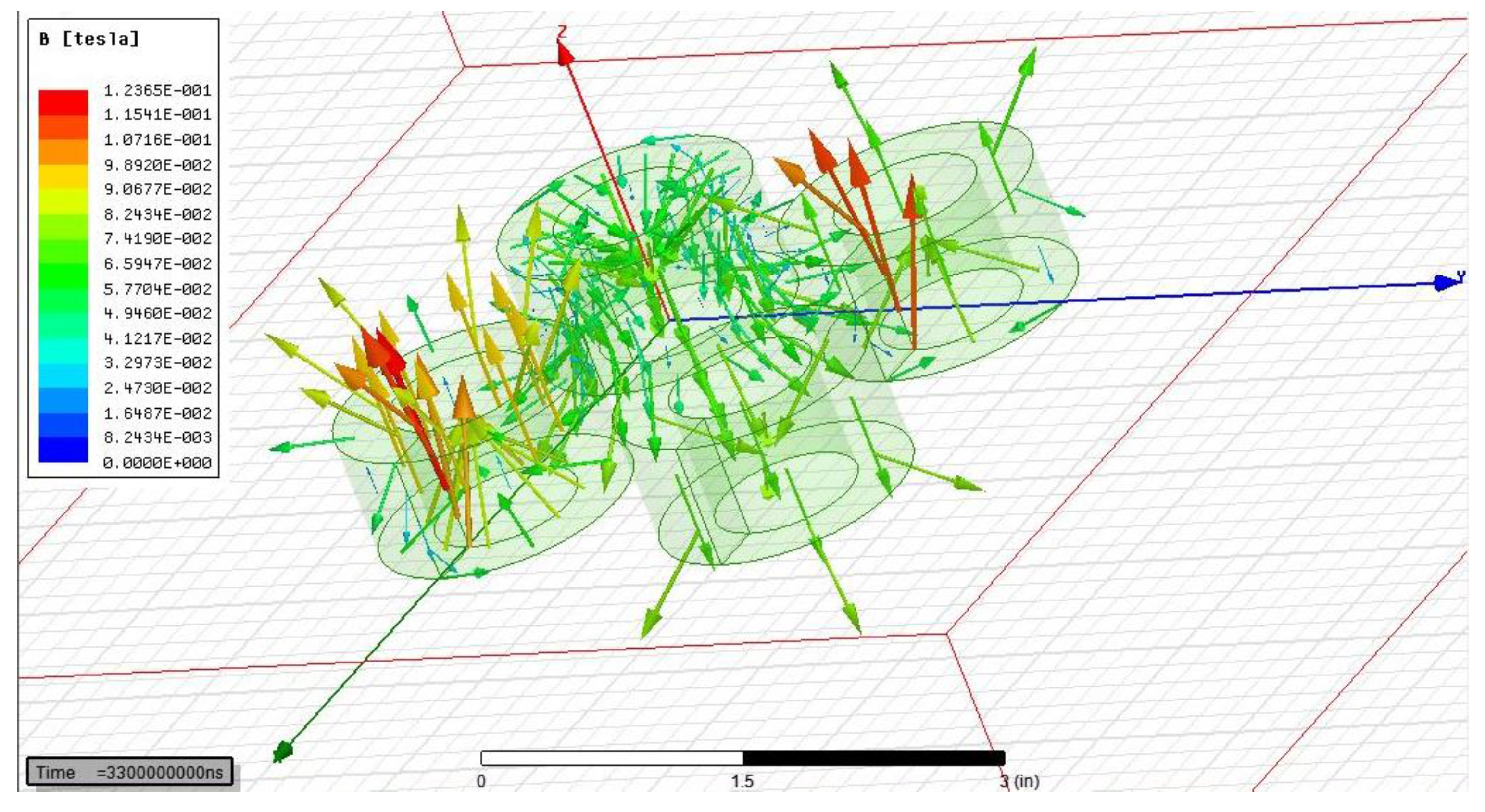
2.2. Permanent Magnet Configuration
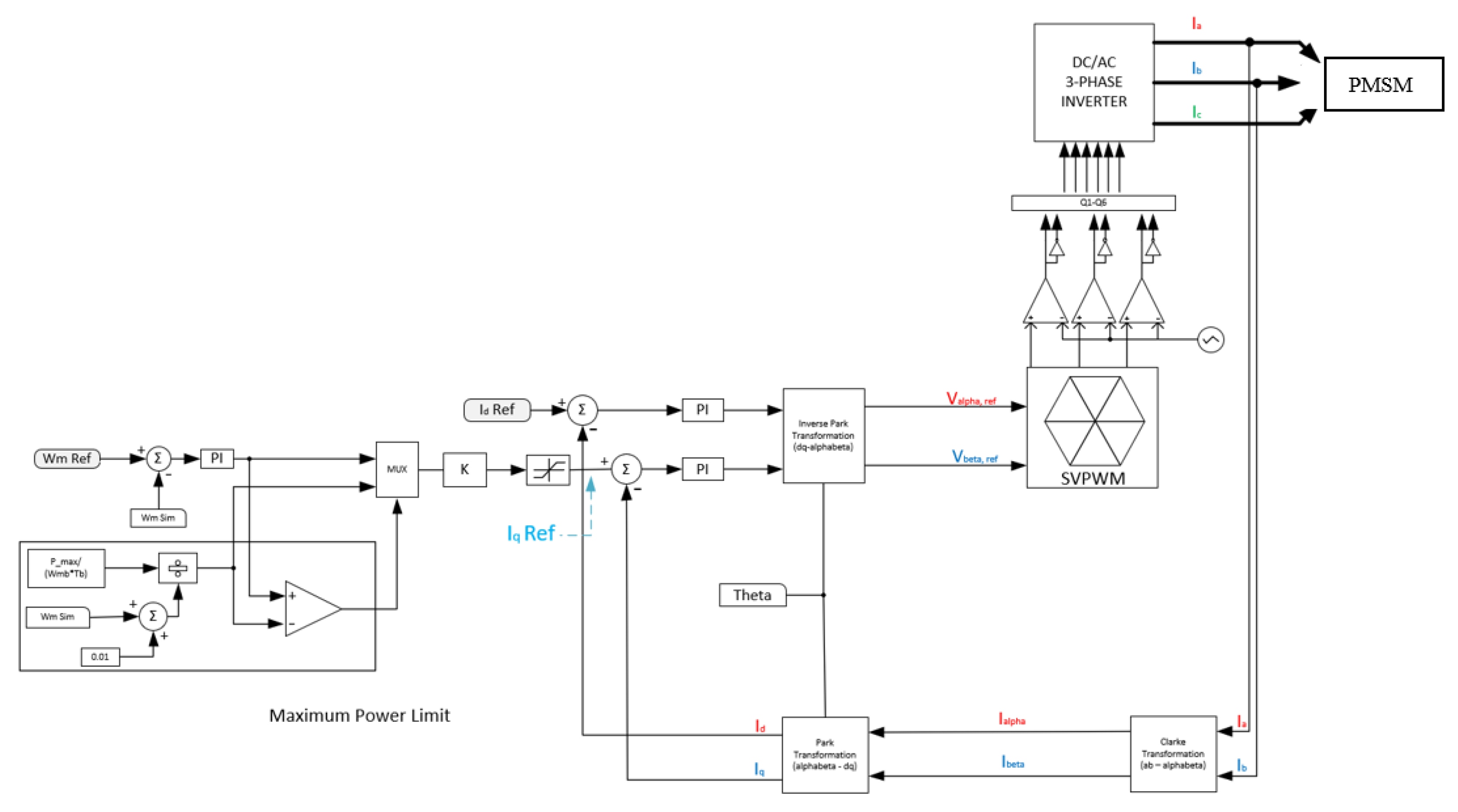
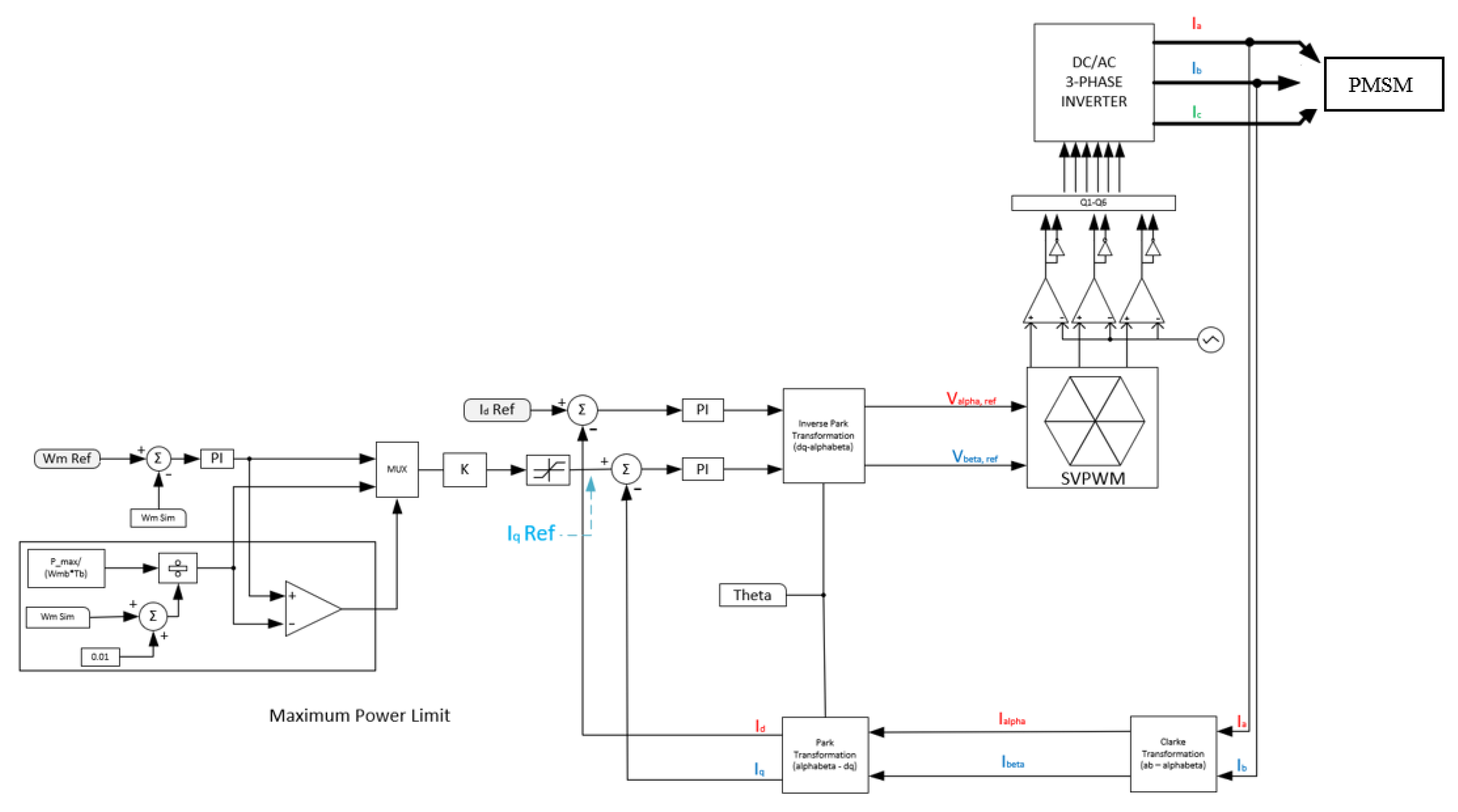
2.3. Field Oriented Control
2.4. LSM Formulas to Generate Specifications
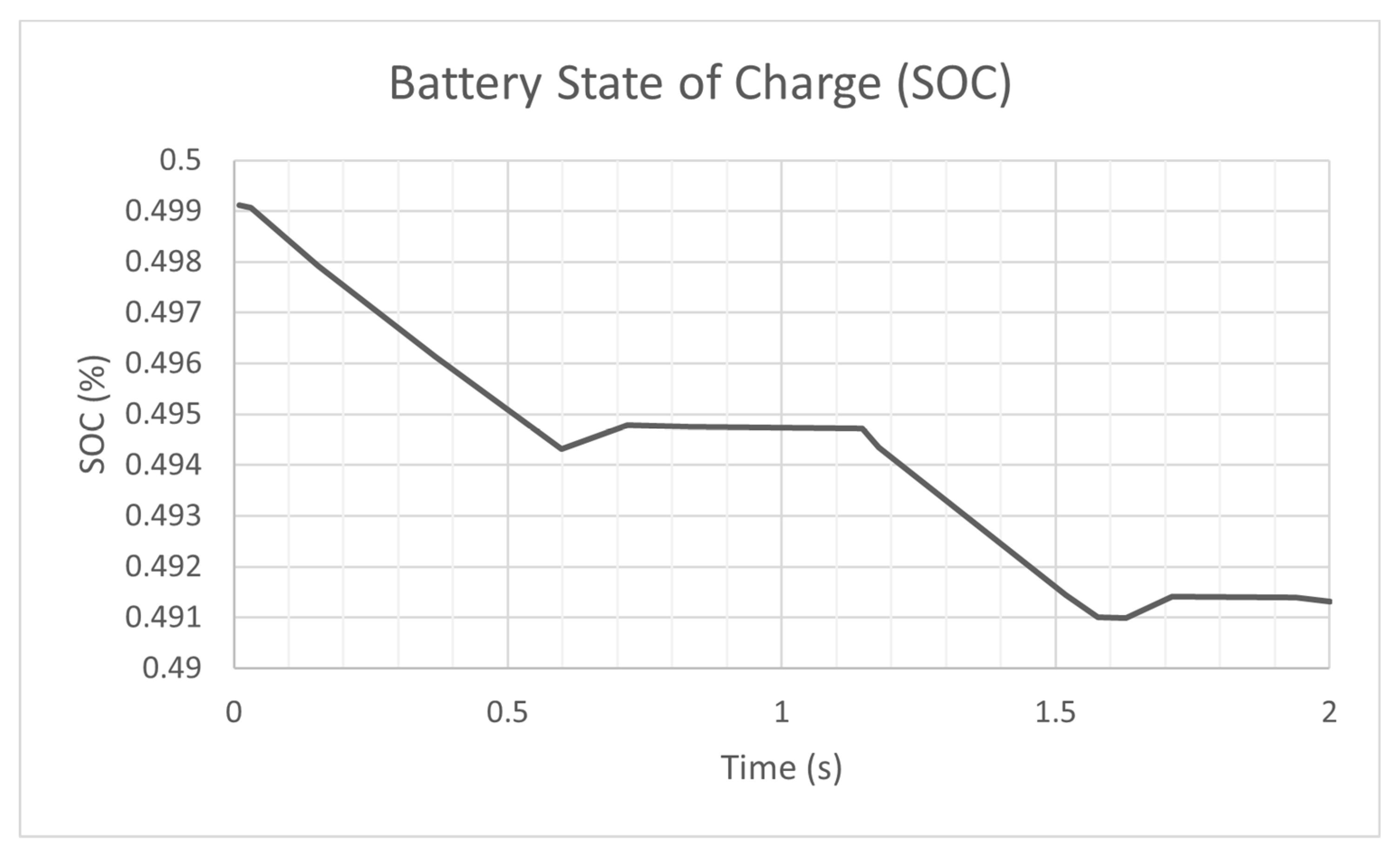
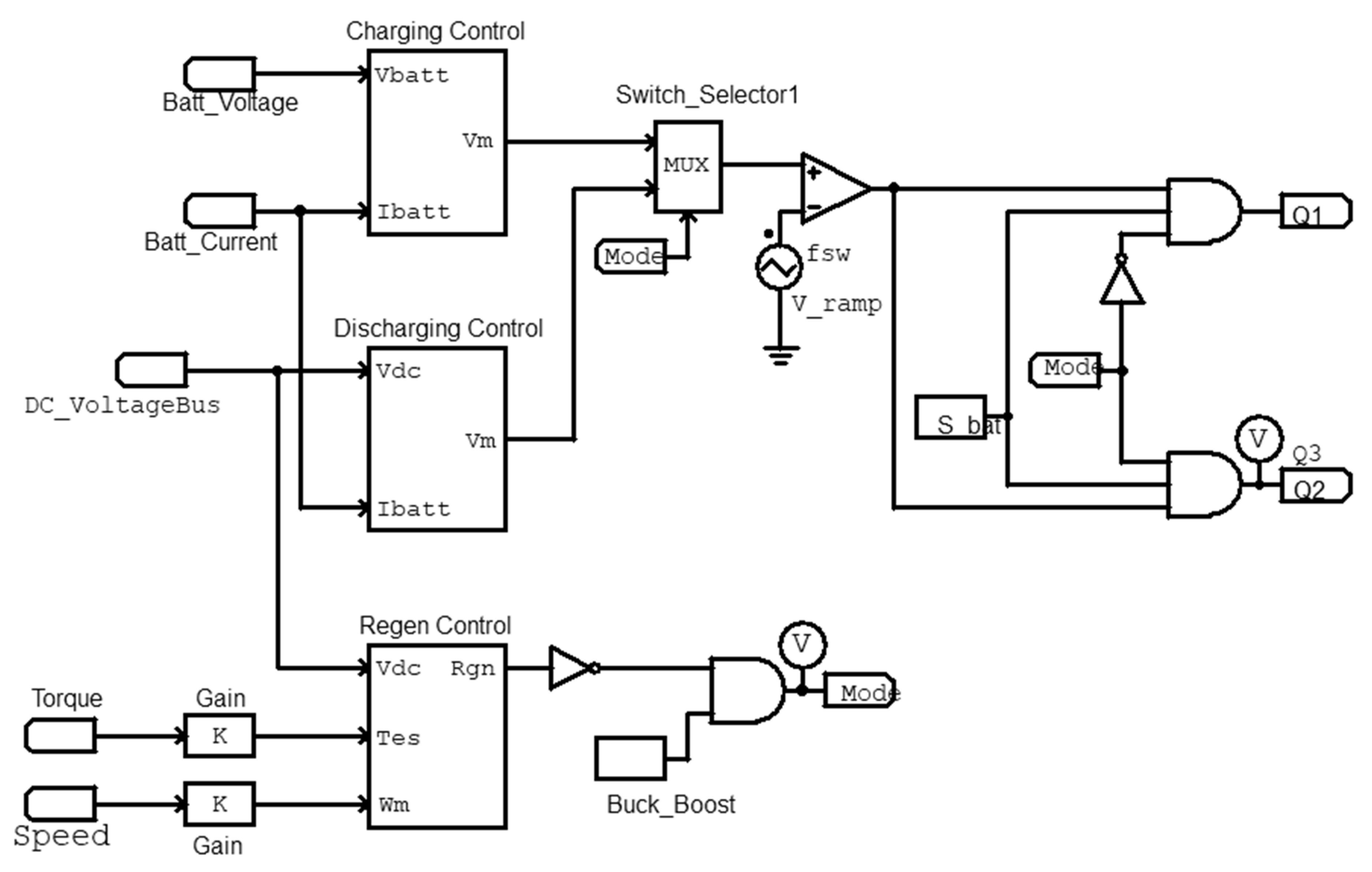
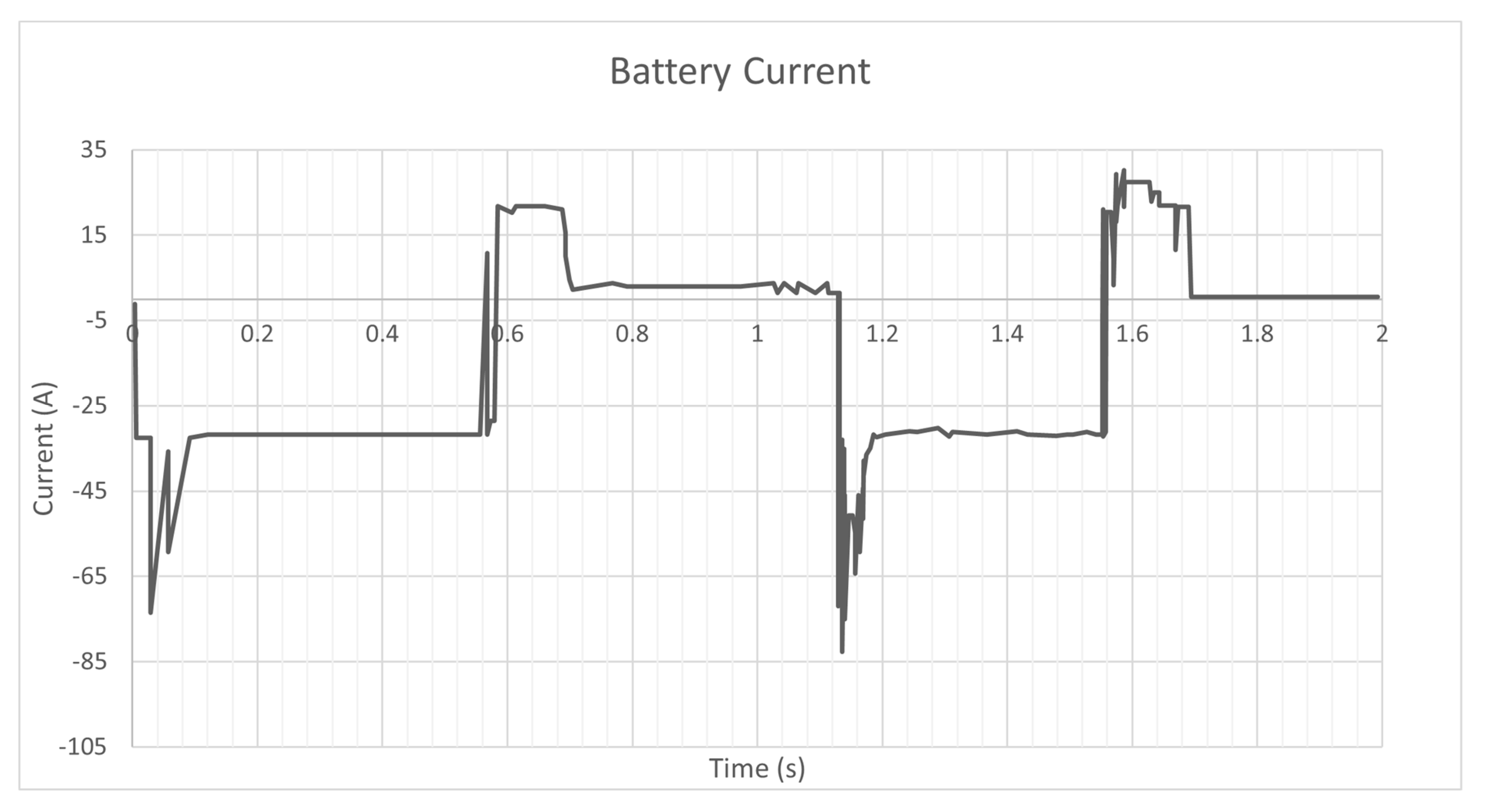
2.5. Modeling of Battery and Bidirectional Converter
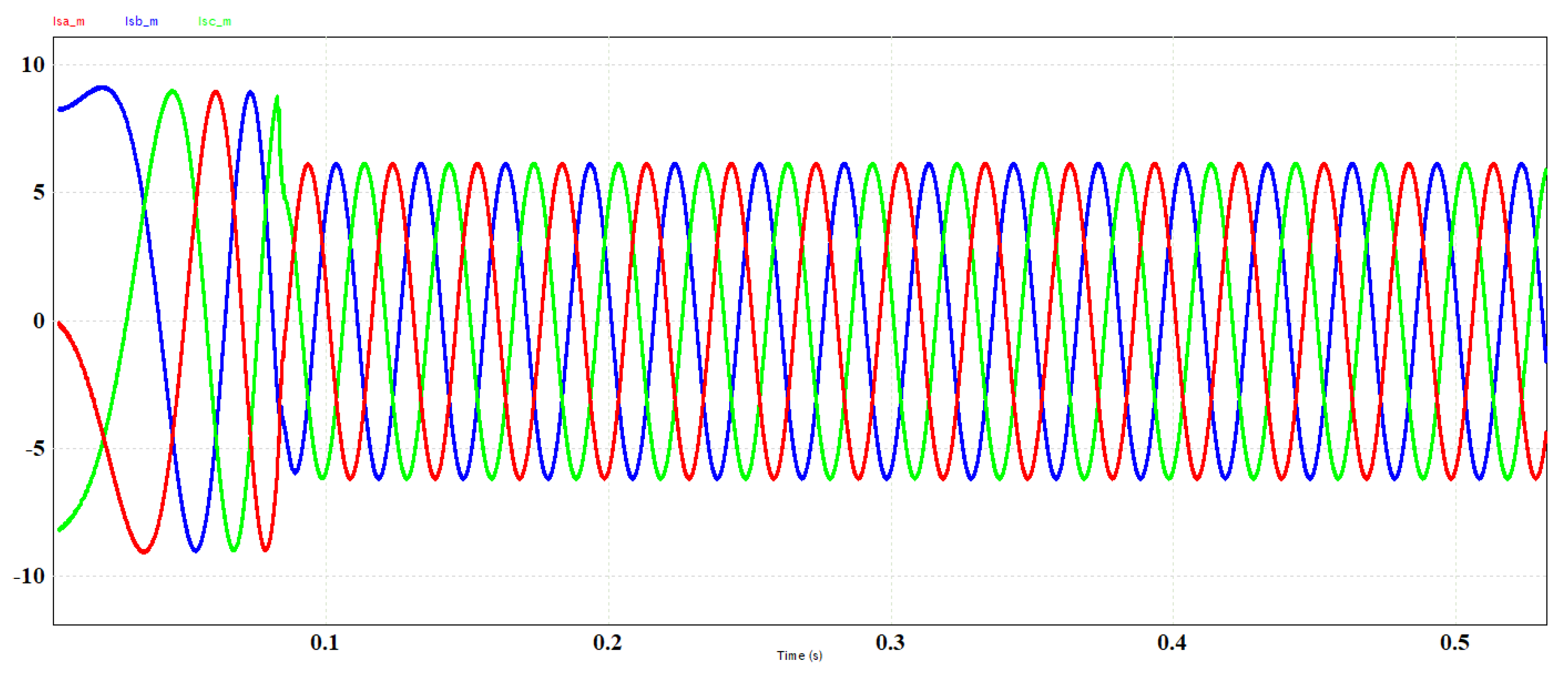
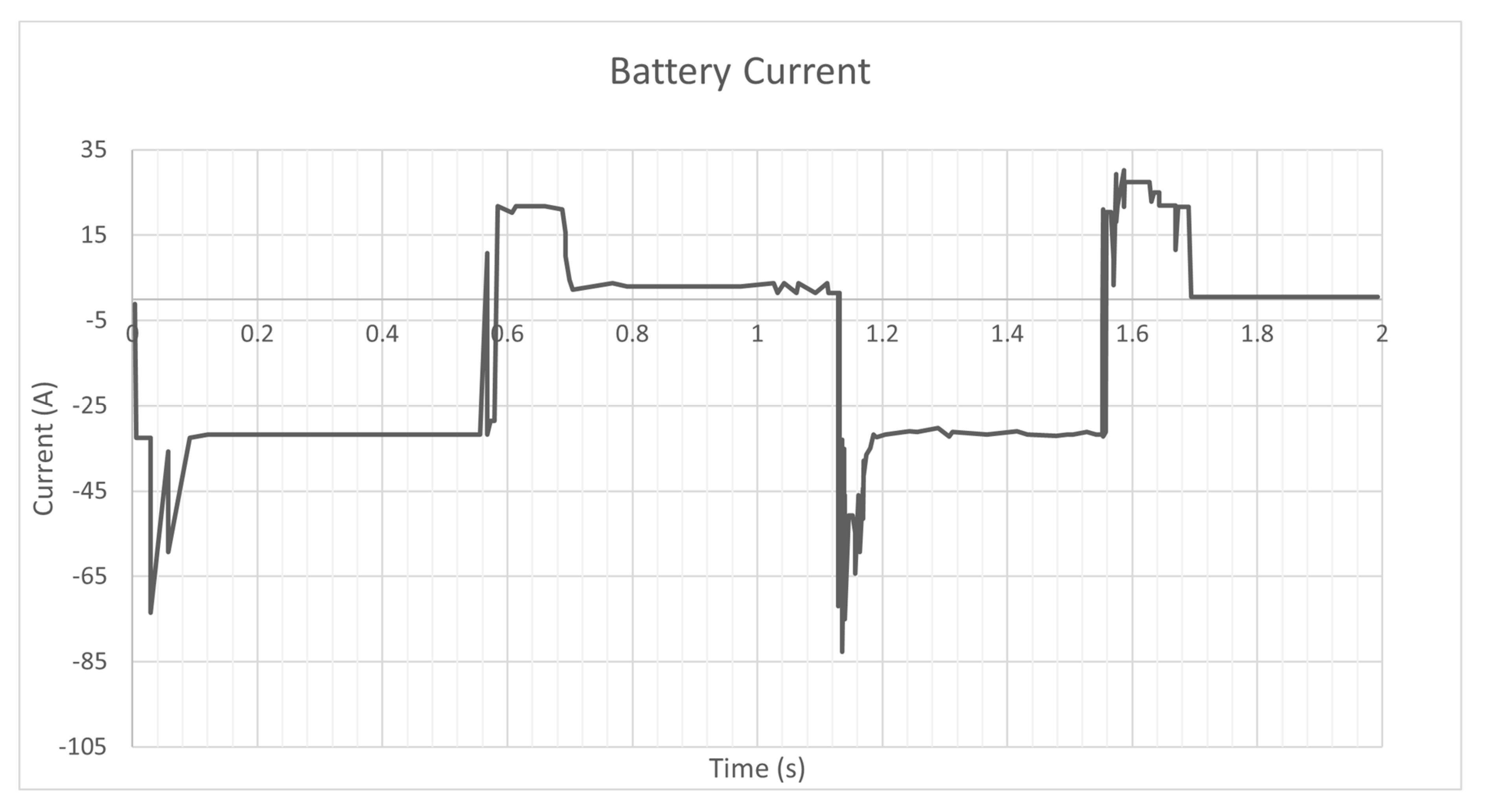
3. Simulation Results
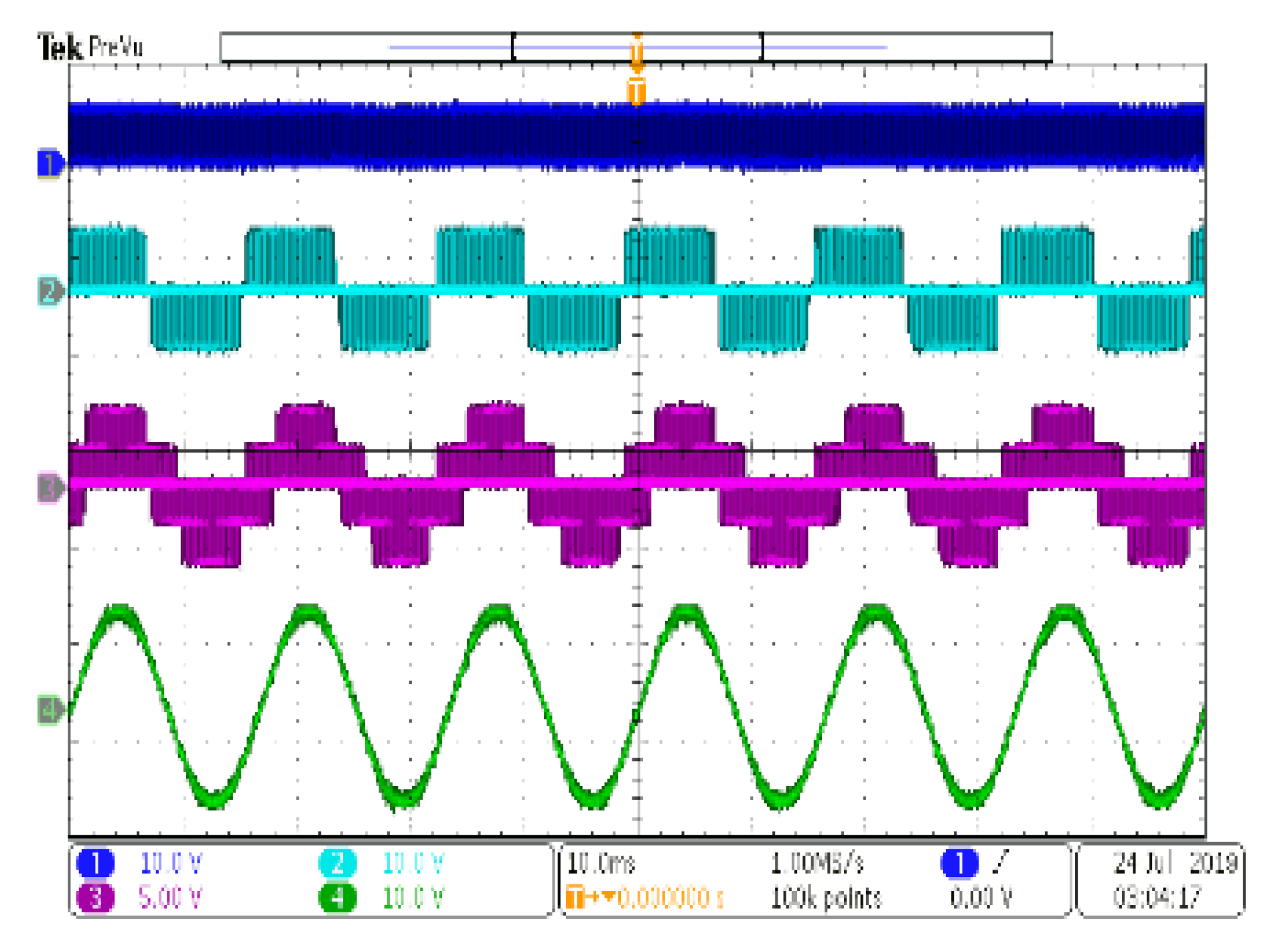
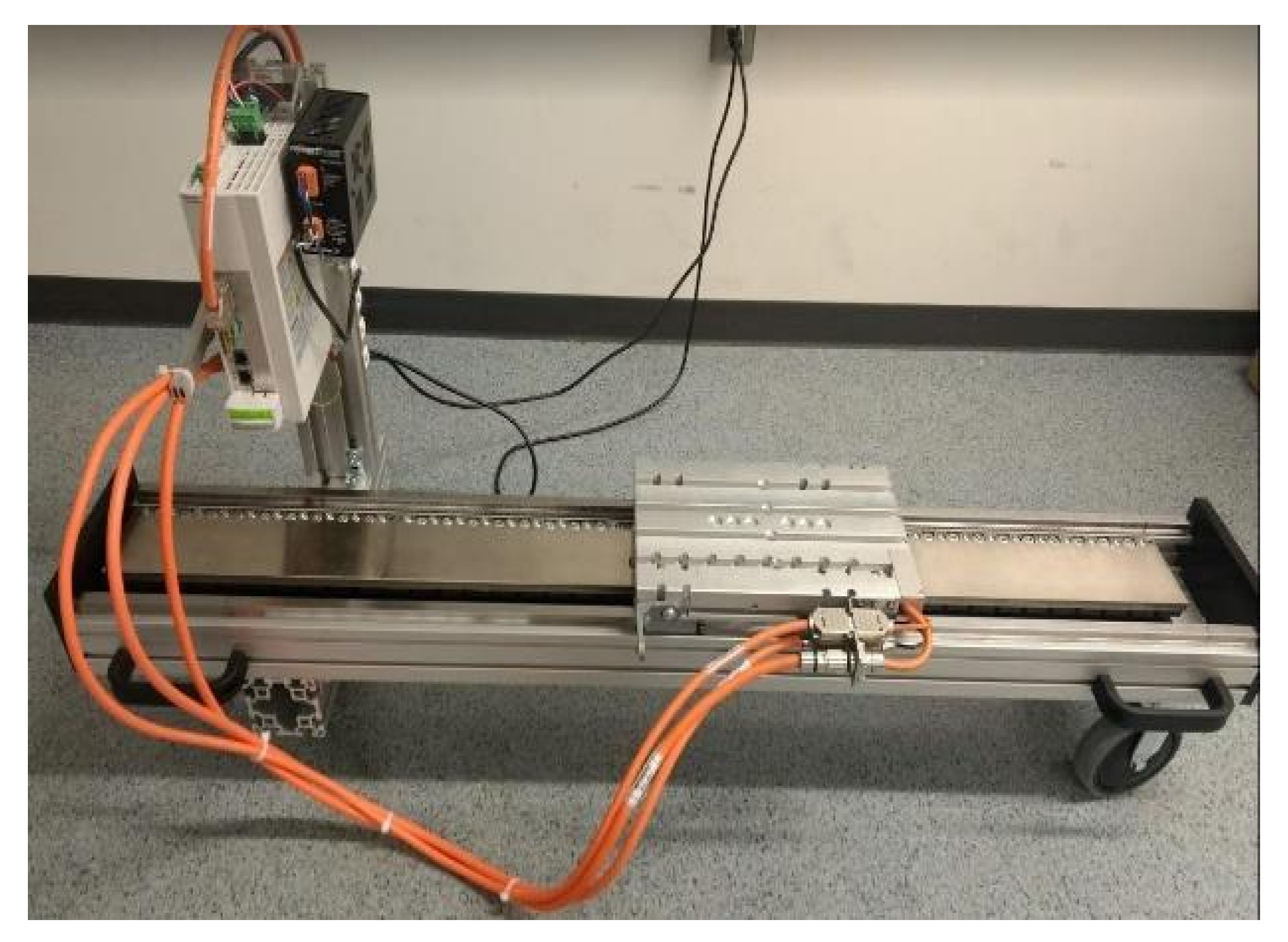
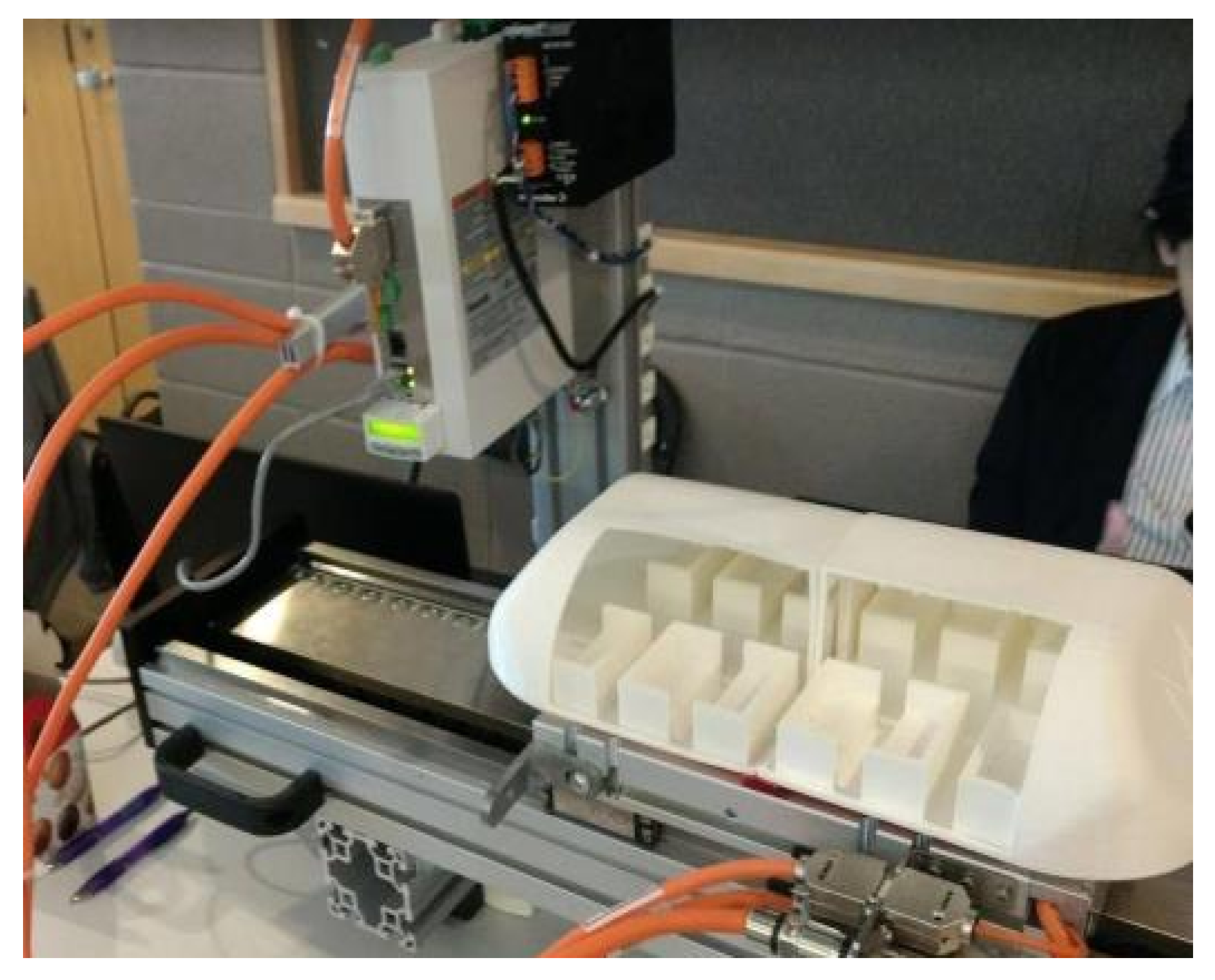
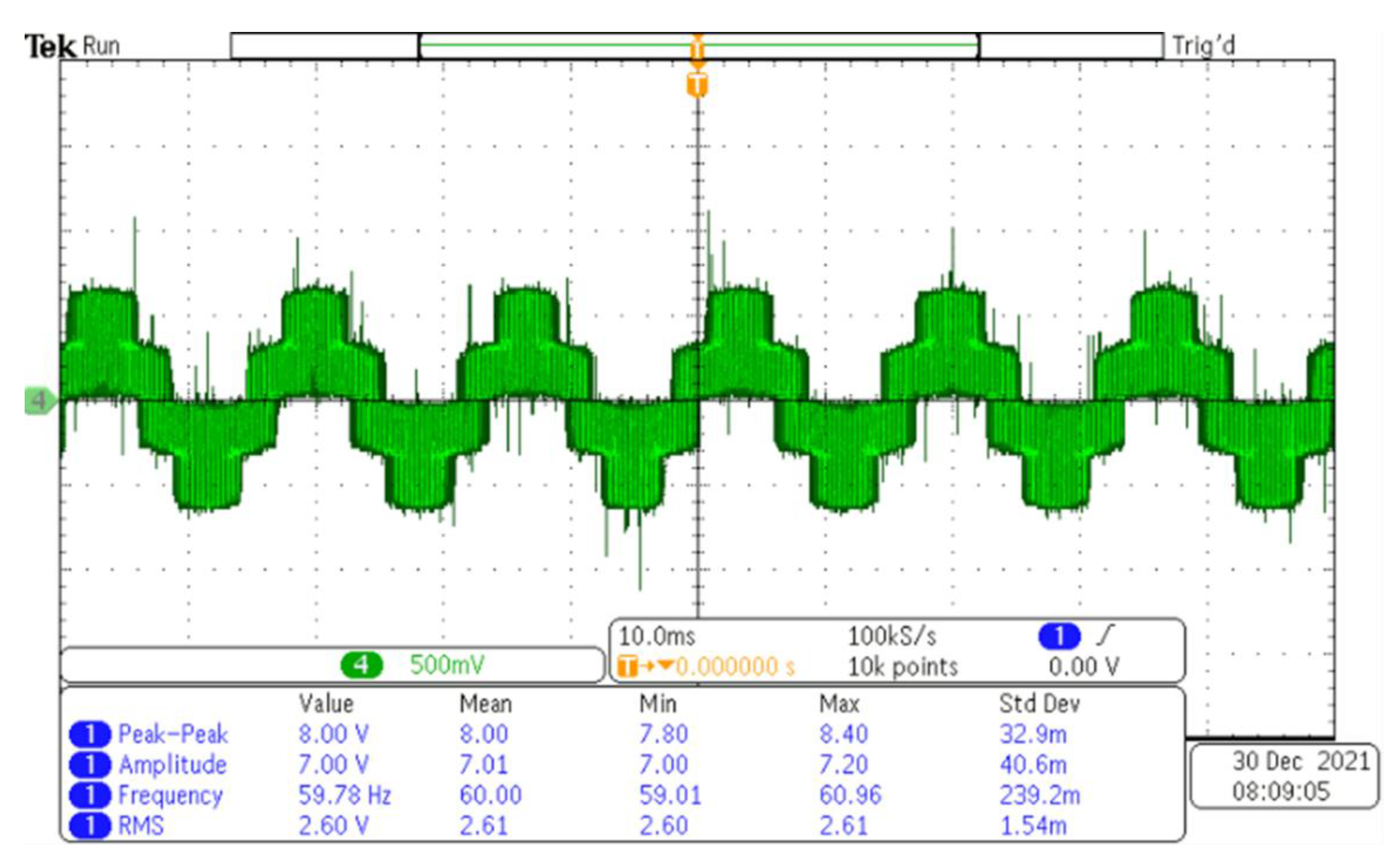
4. Experimental Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Conflicts of Interest
Nomenclature
| LIM | Linear Induction Motor |
| LSM | Linear Synchronous Motor |
| PMSM | Permanent Magnet Synchronous Motor |
| EMS | Electromagnetic Suspension |
| EDS | Electrodynamic Suspension |
| POD | Referring to Hyperloop Capsule/Vehicle |
| FOC | Field Oriented Control |
| SVPWM | Space Vector Pulse Width Modulation |
| uabc | Stator a, b, c phase to neutral voltages |
| Rabc | Stator a, b, c phase resistances |
| iabc | Stator a, b, c phase currents |
| Labc | Matrix of stator phase self and mutual inductances |
| Laa, Lbb, Lcc | Stator a, b, c phase self-inductances |
| Mab, Mac, Mba, Mbc, Mca, Mcb | Mutual inductances of stator a, b, c phases |
| ΨMabc | Stator a, b, c phase flux linkages from PMSM |
| Te | Electromagnetic Torque |
| SOC | State of Charge |
| Erated | Rated voltage of battery cell |
| Qrated | Rated capacity of battery cell |
| Rbattery | Internal resistance of the battery cell |
| Np | Number of cells in parallel of battery pack |
| Np | Number of cells in parallel of battery pack |
References
- IEA. Transport: Improving the sustainability of passenger and freight transport, International Energy Agency. Available online: https://www.iea.org/topics/transport (accessed on 22 September 2019).
- Ji, W.Y.; Jeong, G.; Park, C.B.; Jo, I.H.; Lee, H.W. A Study of Non-Symmetric Double-Sided Linear Induction Motor for Hyperloop All-In-One System (Propulsion, Levitation, and Guidance). IEEE Trans. Magn. 2018, 11. [Google Scholar] [CrossRef]
- Janzen, R. TransPod Ultra-High-Speed Tube Transportation: Dynamics of Vehicles and Infrastructure. Procedia. Eng. 2017, 199, 8–17. [Google Scholar] [CrossRef]
- Hasirci, U.; Balikci, A.; Zabar, Z.; Birenbaum, L. Experimental performance investigation of a novel magnetic levitation system. IEEE Trans. Plasma. Sci. 2013, 5, 1174–1181. [Google Scholar] [CrossRef]
- Sayeed, J.M.; Abdelrahman, A.; Youssef, M.Z. Hyperloop Transportation System: Control, and Drive System Design. In Proceedings of the IEEE Energy Convers. Congr. Expo. (ECCE 2018), Portland, OR, USA, 23–27 September 2018; pp. 2767–2773. [Google Scholar] [CrossRef]
- Zhang, Z.; She, L.; Zhang, L.; Shang, C.; Chang, W. Structural optimal design of a permanent-electro magnetic suspension magnet for middle-low-speed maglev trains. IET Electr. Syst. Transp. 2011, 2, 61–68. [Google Scholar] [CrossRef]
- Lim, J.; Jeong, J.H.; Kim, C.H.; Ha, C.W.; Park, D.Y. Analysis and Experimental Evaluation of Normal Force of Linear Induction Motor for Maglev Vehicle. IEEE Trans. Magn. 2017, 11. [Google Scholar] [CrossRef]
- Jeong, J.H.; Lim, J.; Ha, C.W.; Kim, C.H.; Choi, J.Y. Thrust and efficiency analysis of linear induction motors for semi-high-speed Maglev trains using 2D finite element models. In Proceedings of the 2016 IEEE Conference on Electromagnetic Field Computation (CEFC), Miami, FL, USA, 13–16 November 2016. [Google Scholar] [CrossRef]
- Wang, H.; Li, J.; Qu, R.; Lai, J.; Huang, H.; Liu, H. Study on High Efficiency Permanent Magnet Linear Synchronous Motor for Maglev. IEEE Trans. Appl. Supercond. 2018, 3. [Google Scholar] [CrossRef]
- Boldea, I. Linear Electric Machines, Drives, and Maglevs Handbook, 1st ed.; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Yesilbag, E.; Ergene, L.T. Field oriented control of permanent magnet synchronous motors used in washers. In Proceedings of the 2014 16th International Power Electronics and Motion Control Conference and Exposition, Antalya, Turkey, 21–24 September 2014; pp. 1259–1264. [Google Scholar] [CrossRef]
- U.S.E.P. Agency. Global Greenhouse Gas Emissions Data. Available online: https://www.epa.gov/ghgemissions/global-greenhouse-gas-emissions-data (accessed on 21 March 2020).
- Voltes-Dorta, A.; Becker, E. The potential short-term impact of a Hyperloop service between San Francisco and Los Angeles on airport competition in California. Transp. Policy 2018, 71, 45–56. [Google Scholar] [CrossRef] [Green Version]
- You, C.; Zhang, R.; Wang, X.; Du, Y.; Ge, Q. Vector control of maglev PMLSM based on minimum loss SVPWM method. In Proceedings of the 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016. [Google Scholar]
- Sadat, A.R.; Shadabi, H.; Sabahi, M.; Sharifian, M.B.B. Tracking of X-Y direction positions with using permanent magnet linear synchronous motors. In Proceedings of the 2014 22nd Iranian Conference on Electrical Engineering (ICEE), Tehran, Iran, 20–22 May 2014; pp. 527–532. [Google Scholar] [CrossRef]
- Wang, K.; Ge, Q.; Shi, L.; Li, Y.; Zhang, Z. Development of ironless Halbach permanent magnet linear synchronous motor for traction of a novel maglev vehicle. In Proceedings of the 2017 11th International Symposium on Linear Drives for Industry Applications (LDIA), Osaka, Japan, 6–8 September 2017. [Google Scholar] [CrossRef]
- Kowal, B.; Ranosz, R.; Klodawski, M.; Jachimowski, R.; Piechna, J. Demand for passenger capsules for Hyperloop High-Speed Transportation System -case study from Poland. IEEE Trans. Transp. Electrif. 2021. [Google Scholar] [CrossRef]
- Tbaileh, A.; Elizondo, M.; Kintner-Meyer, M.; Vyakaranam, B.; Agrawal, U.; Dwyer, M.; Samaan, N. Modeling and Impact of Hyperloop Technology on the Electricity Grid. IEEE Trans. Power Syst. 2021, 5, 3938–3947. [Google Scholar] [CrossRef]
- Pan, S. Development of Permanent Magnet Tubular Linearmotor and Position Feedback Device Based on Hallsensor. Univ Wollongong Thesis Collect. 1954–2016. Available online: https://ro.uow.edu.au/theses/4852 (accessed on 14 December 2021).
- MATLAB, “PMLSM”. Available online: https://www.mathworks.com/help/physmod/sps/ref/pmlsm.html (accessed on 14 December 2021).
- Ong, C.-M. Dynamic Simulations of Electric Machines; Prentice Hall: Hoboken, NJ, USA, 1998. [Google Scholar]
- Giangrande, P.; Cupertino, F.; Pellegrino, G. Modelling of linear motor end-effects for saliency based sensorless control. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12 September 2010; pp. 3261–3268. [Google Scholar] [CrossRef]
- Platen, M.; Henneberger, G. Examination of leakage and end effects in a linear synchronous motor for vertical transportation by means of finite element computation. IEEE Trans. Magn. 2001, 37, 3640–3643. [Google Scholar] [CrossRef]
- Lu, J.; Ma, W. Research on end effect of linear induction machine for high-speed industrial transportation. IEEE Trans. Plasma Sci. 2011, 39, 116–120. [Google Scholar] [CrossRef]
- Gieras, J.F.; Piech, Z.J.B.; Tomczuk, B. Linear Synchronous Motors: Transportation and Automation Systems; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Abassi, M.; Khlaief, A.; Saadaoui, O.; Chaari, A.; Boussak, M. Performance analysis of FOC and DTC for PMSM drives using SVPWM technique. In Proceedings of the 16th Int. Conf. Sci. Tech. Autom. Control Comput. Eng. STA 2015, Monastir, Tunisia, 21–23 December 2015. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Description |
|---|---|---|
| p | 8 | Poles |
| Rs | 0.065 | Stator Resistance |
| Ld | 0.001916 | d-axis inductance |
| Lq | 0.005 | q-axis inductance |
| Pmax | 50,000 | Max motor power |
| nmax | 5000 | Maximum rpm |
| Parameters | Value | Units |
|---|---|---|
| Ns No. of cells in series | 70 | cells |
| Np No. of cells in parallel | 60 | cells |
| Erated Rated voltage | 3.6 | V |
| Ecut Discharge cut-off voltage | 2.5 | V |
| Qrated Rated capacity | 3.35 | Ah |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bhuiya, M.; Aziz, M.M.; Mursheda, F.; Lum, R.; Brar, N.; Youssef, M. A New Hyperloop Transportation System: Design and Practical Integration. Robotics 2022, 11, 23. https://doi.org/10.3390/robotics11010023
Bhuiya M, Aziz MM, Mursheda F, Lum R, Brar N, Youssef M. A New Hyperloop Transportation System: Design and Practical Integration. Robotics. 2022; 11(1):23. https://doi.org/10.3390/robotics11010023
Chicago/Turabian StyleBhuiya, Mohammad, Md Mohiminul Aziz, Fariha Mursheda, Ryan Lum, Navjeet Brar, and Mohamed Youssef. 2022. "A New Hyperloop Transportation System: Design and Practical Integration" Robotics 11, no. 1: 23. https://doi.org/10.3390/robotics11010023
APA StyleBhuiya, M., Aziz, M. M., Mursheda, F., Lum, R., Brar, N., & Youssef, M. (2022). A New Hyperloop Transportation System: Design and Practical Integration. Robotics, 11(1), 23. https://doi.org/10.3390/robotics11010023