
Mechanical Behaviour of Large Strain Capacitive Sensor with Barium Titanate Ecoflex Composite Used to Detect Human Motion




Abstract
1. Introduction
2. Materials and Methods
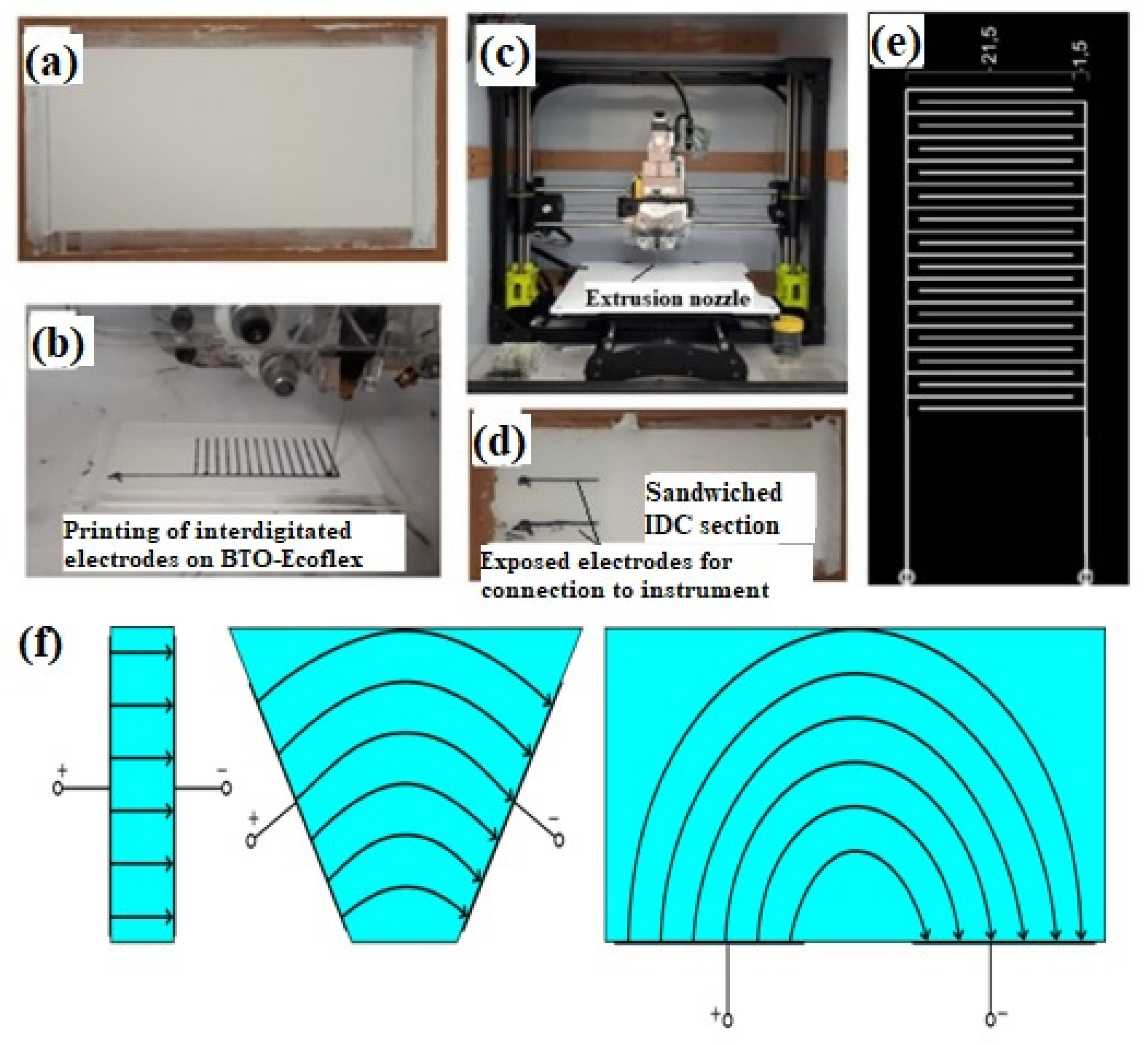
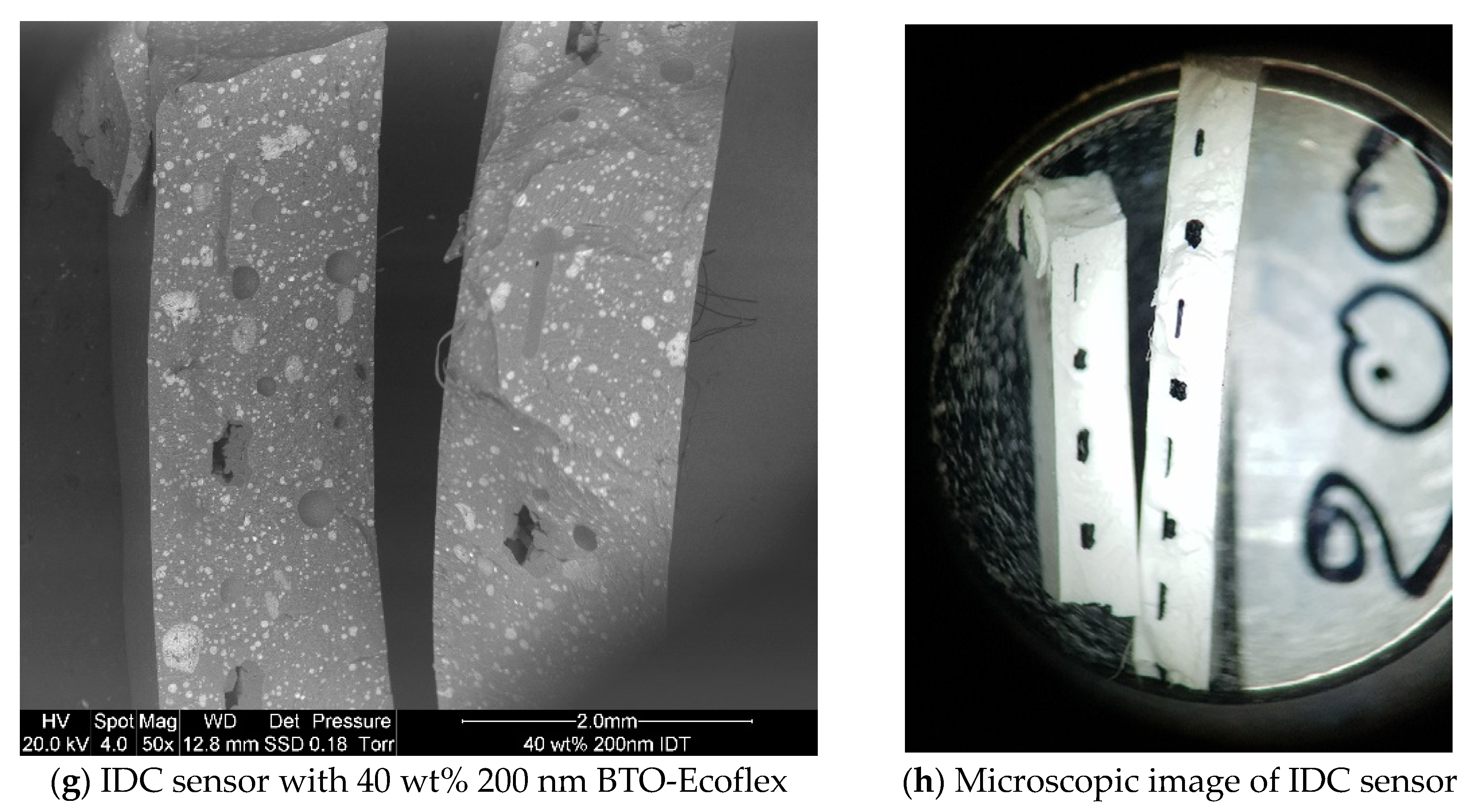
2.1. Fabrication of IDC Sensor
2.2. Fabrication of Composites for Uniaxial Tensile Testing
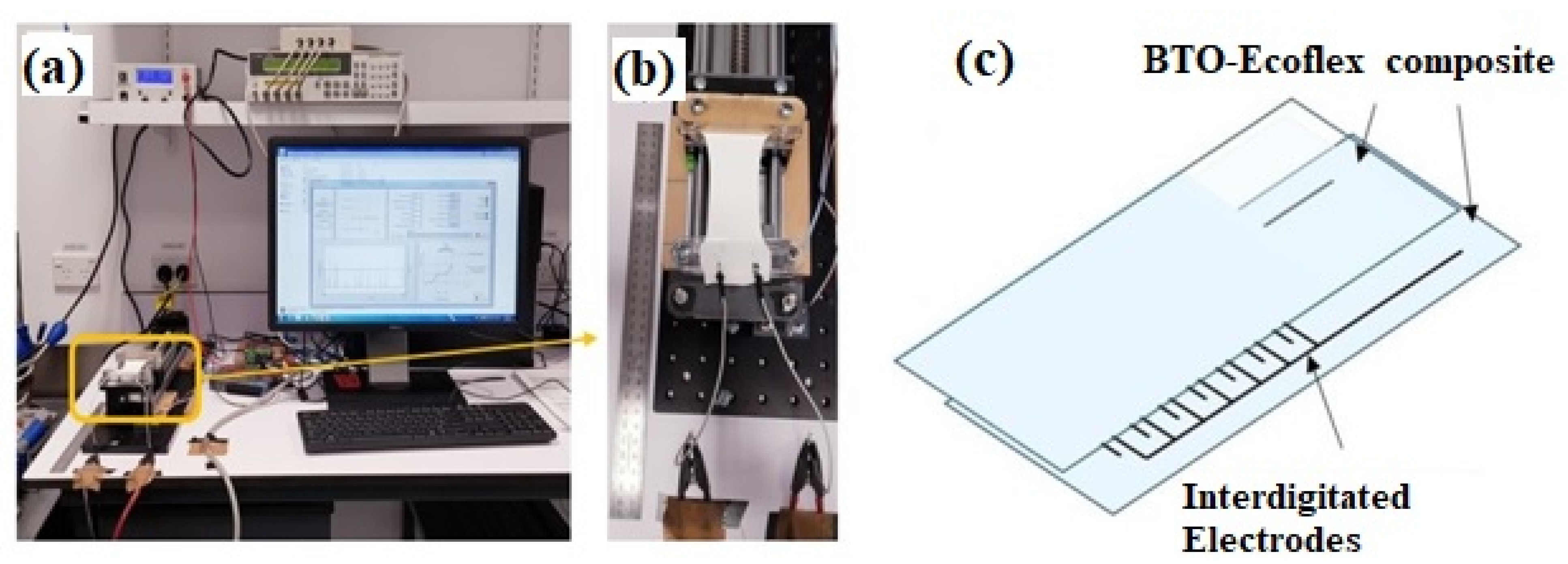
2.3. Stretch-Relax Cyclic Testing of IDC Sensor
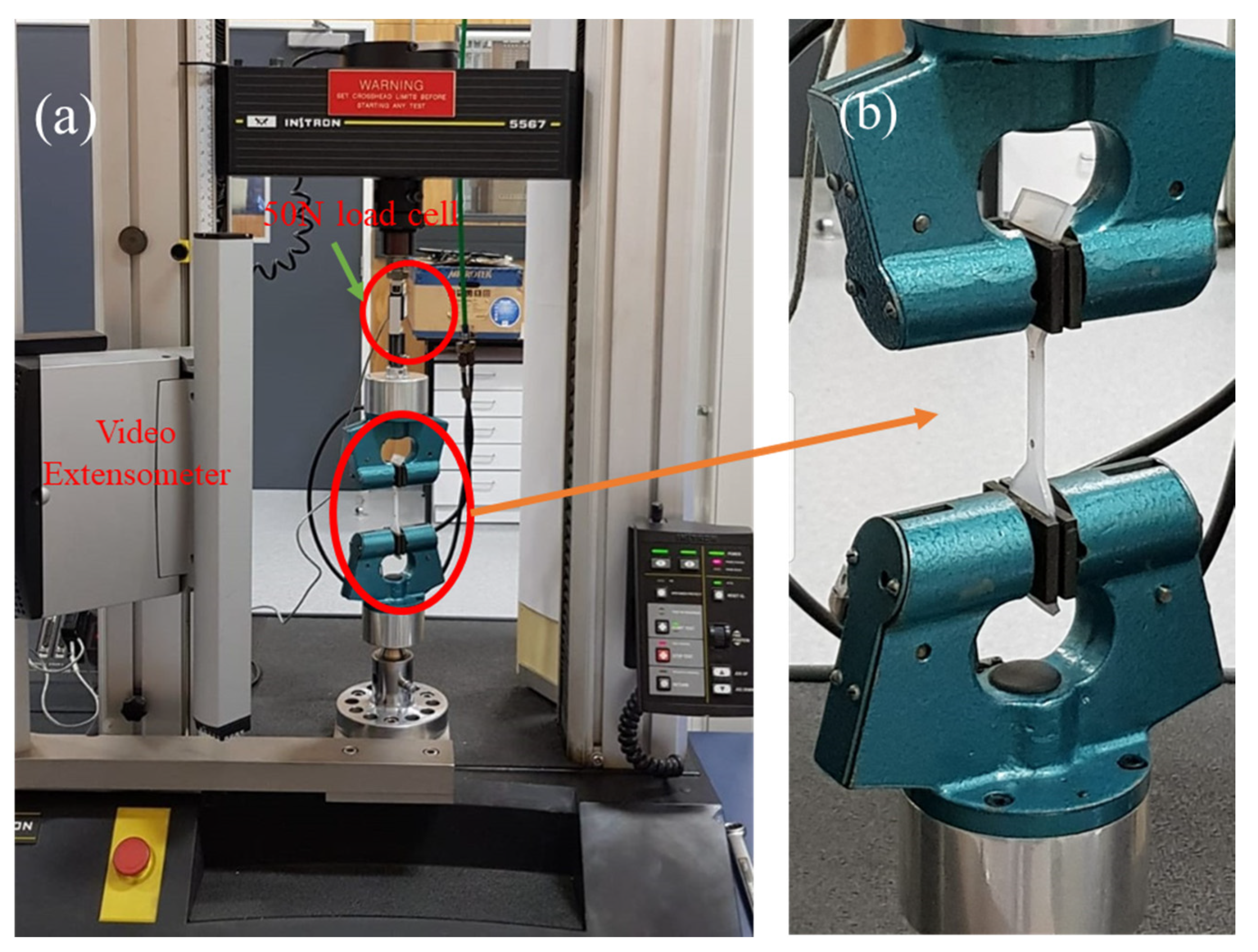
2.4. Uniaxial Tensile Testing at Different Strain Rates of BTO-Ecoflex Composite
3. Results and Discussion
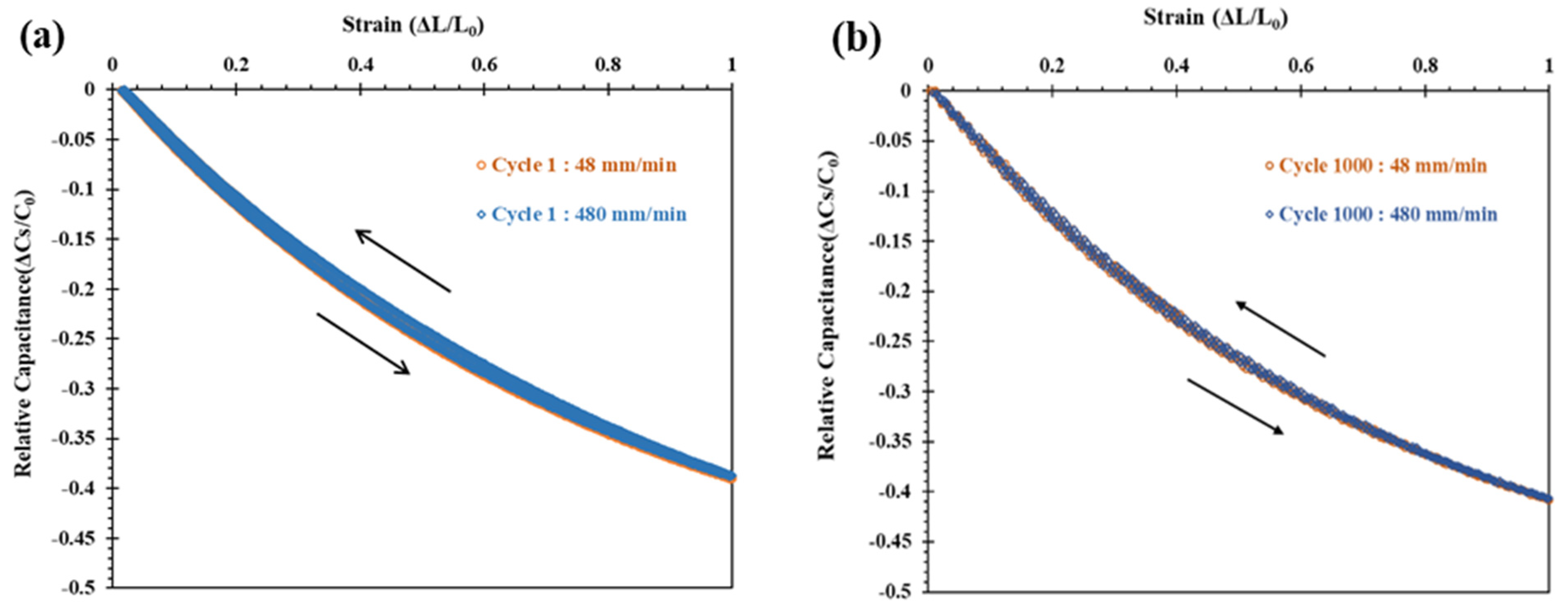
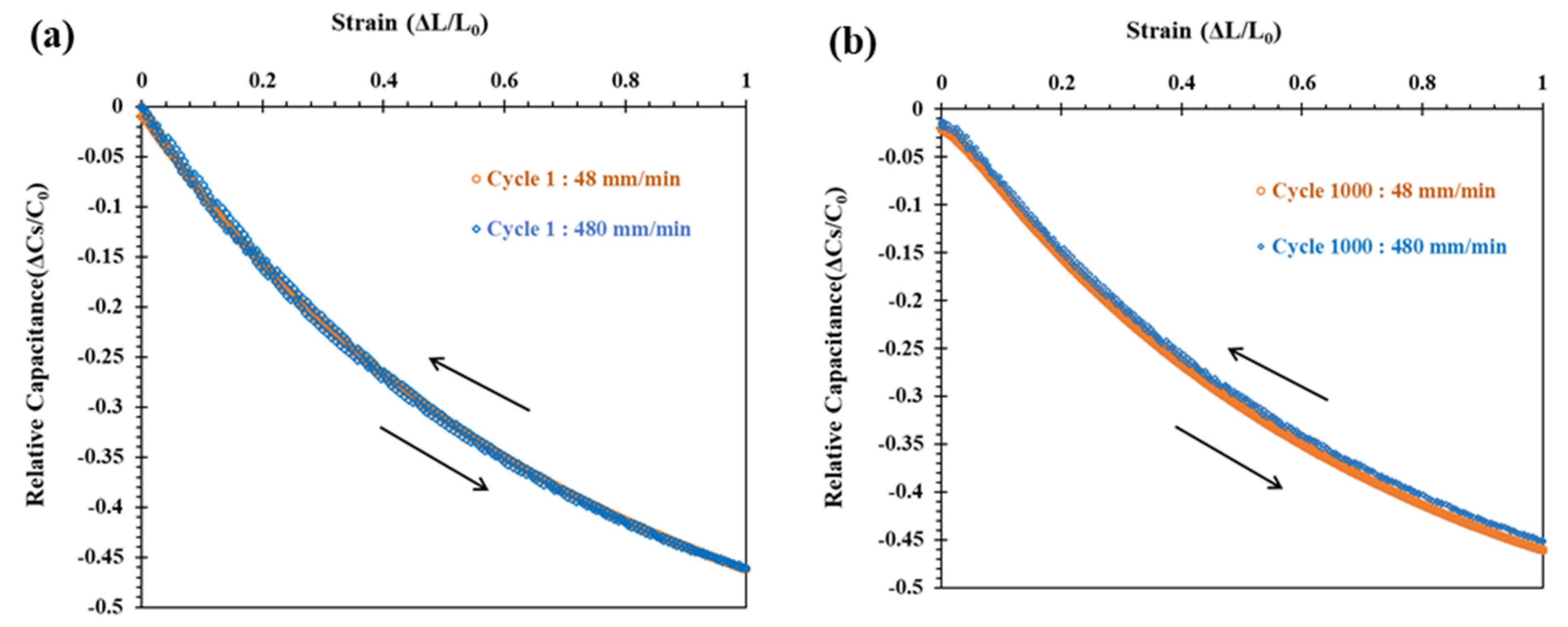
3.1. Strain Rate Dependent Behaviour of IDC Sensor
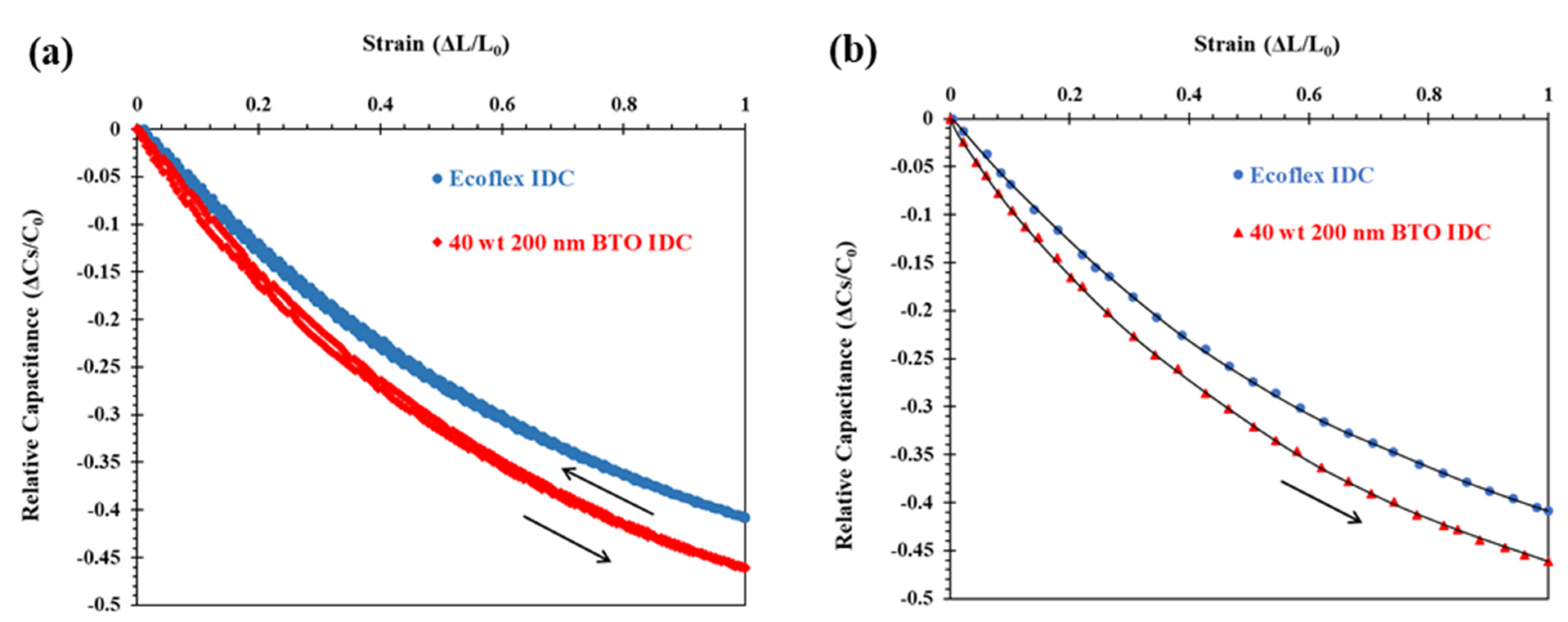
3.2. Sensitivity of Highly Stretchable IDC Sensor to Strain Expressed as Gauge Factor (GF)
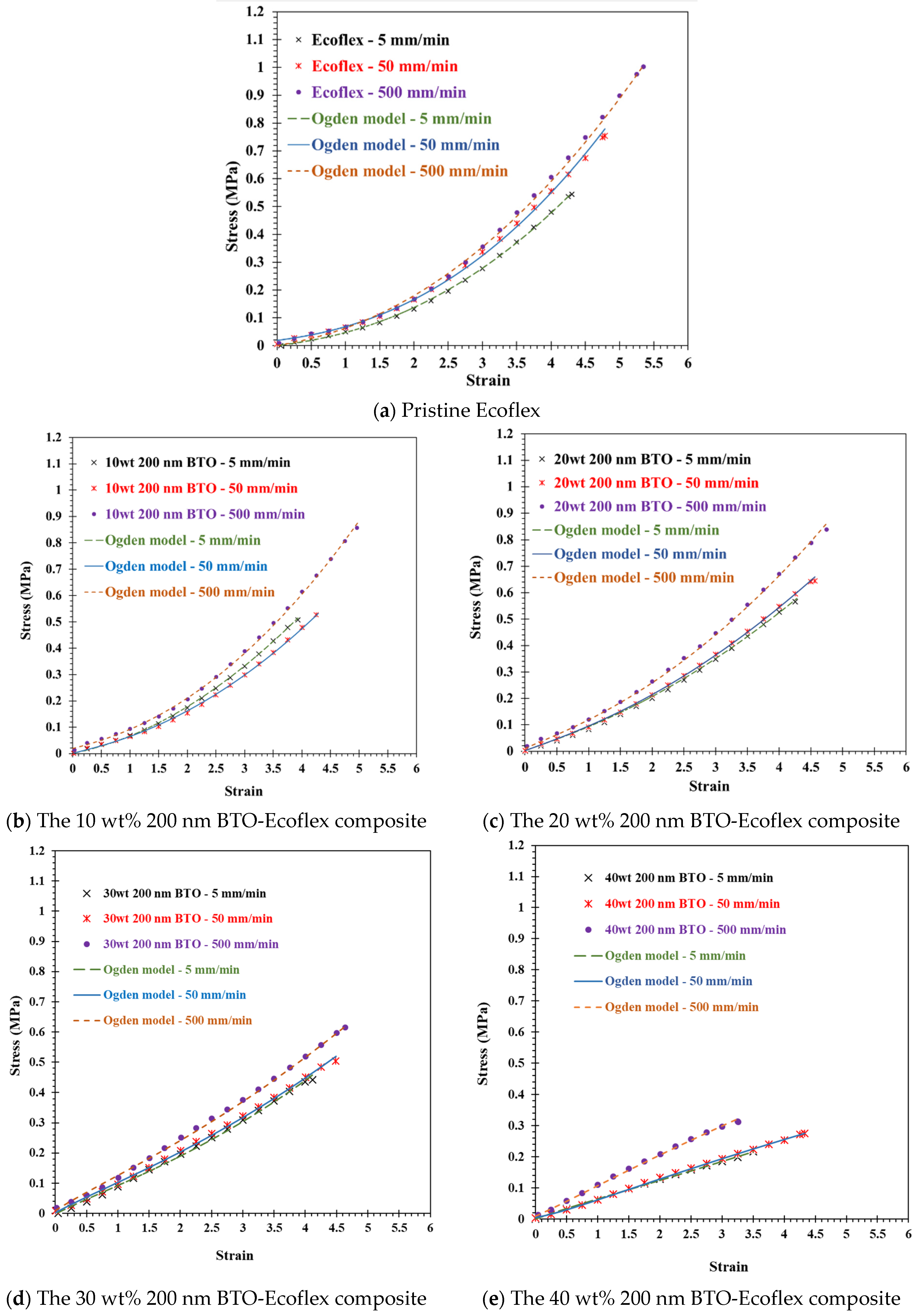
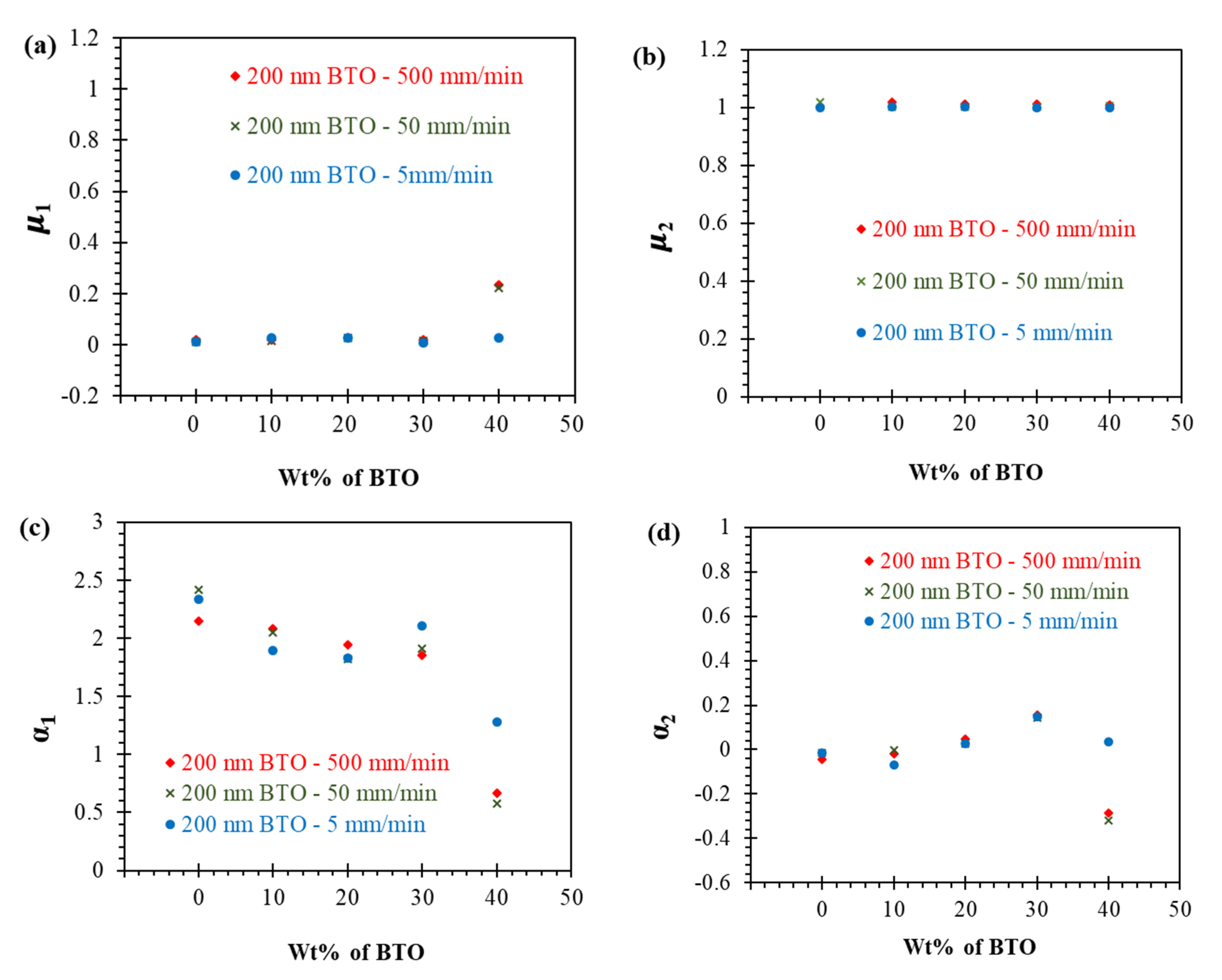
3.3. Stress-Strain Behaviour of BTO-Ecoflex Composite and Ogden Modelling
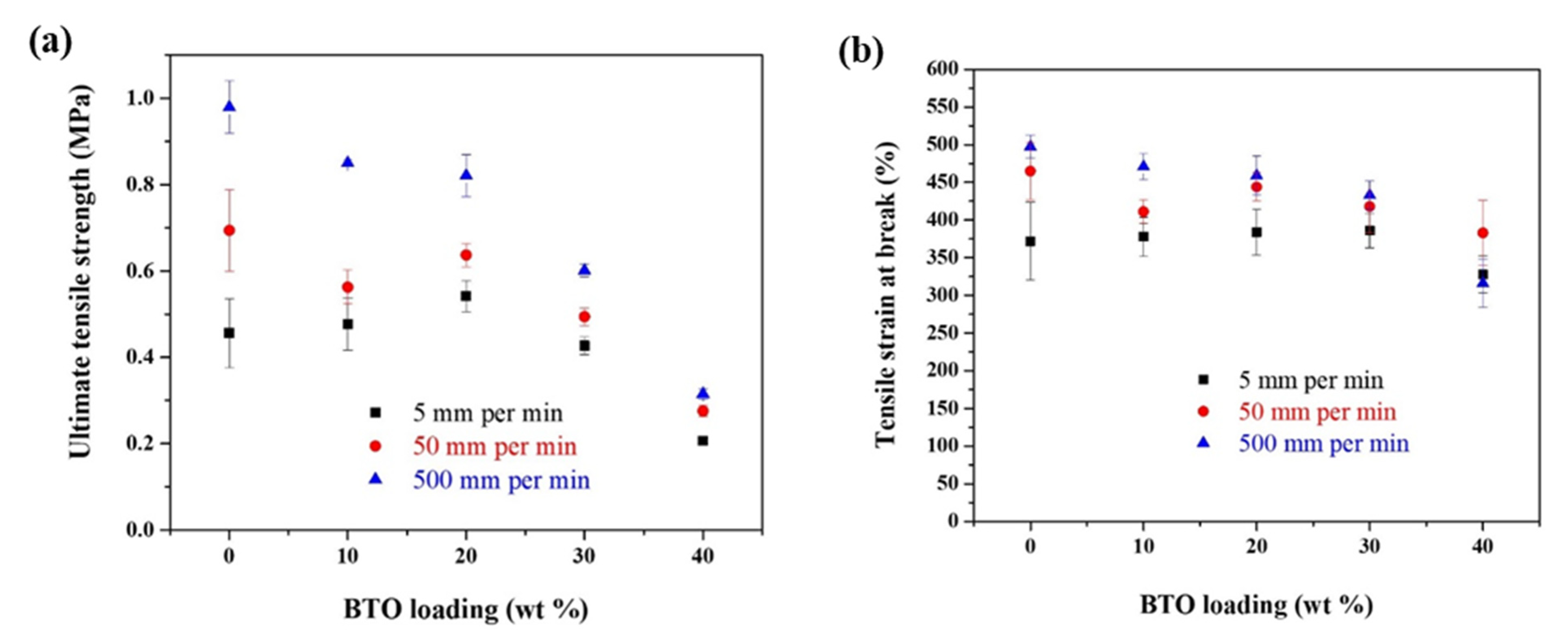
3.4. Ultimate Tensile Strength, Elongation at Breakpoint of 200 nm BTO-Ecoflex Composite
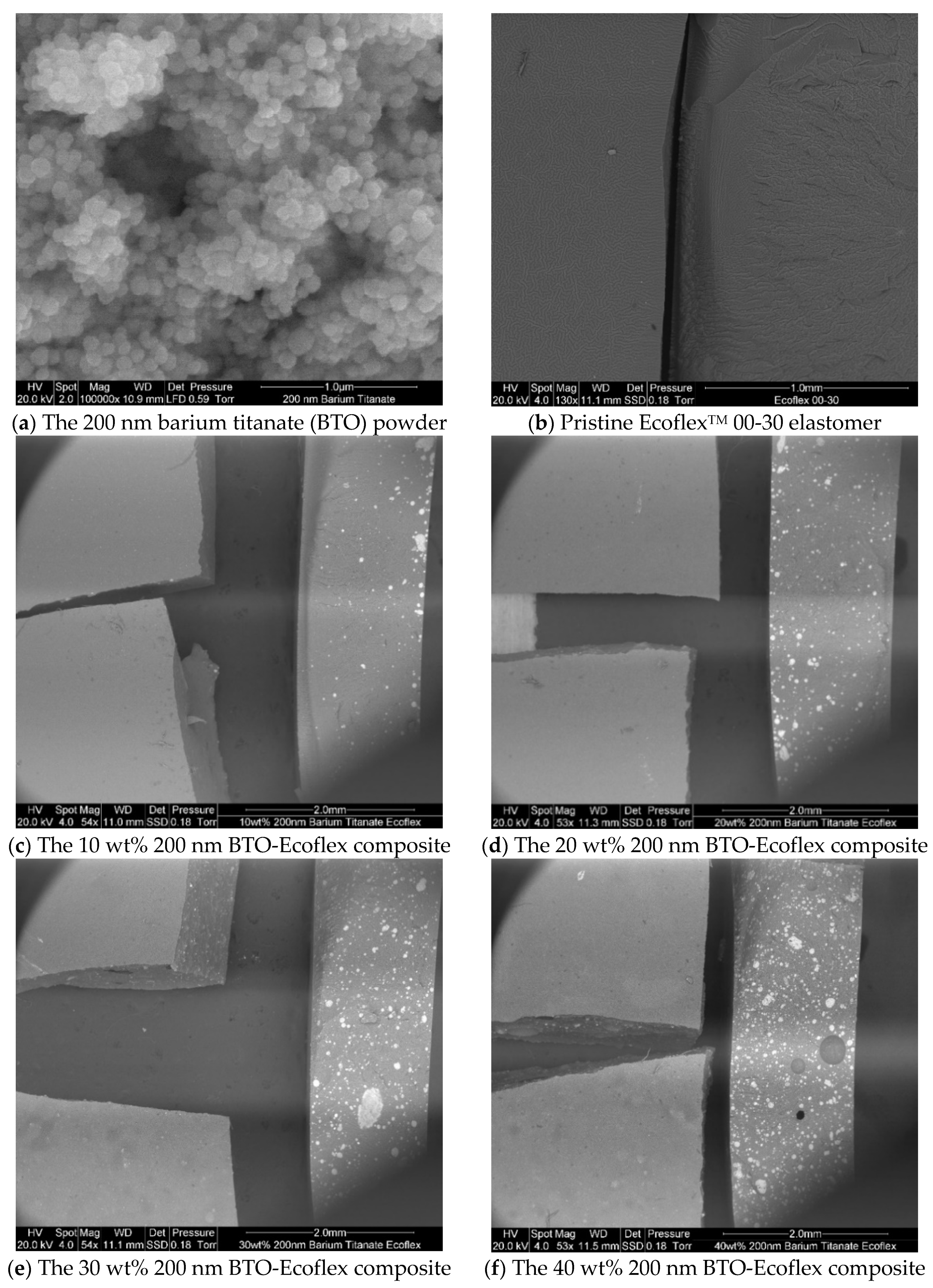
3.5. SEM Analysis of Pristine Ecoflex and 200 nm BTO-Ecoflex Composites
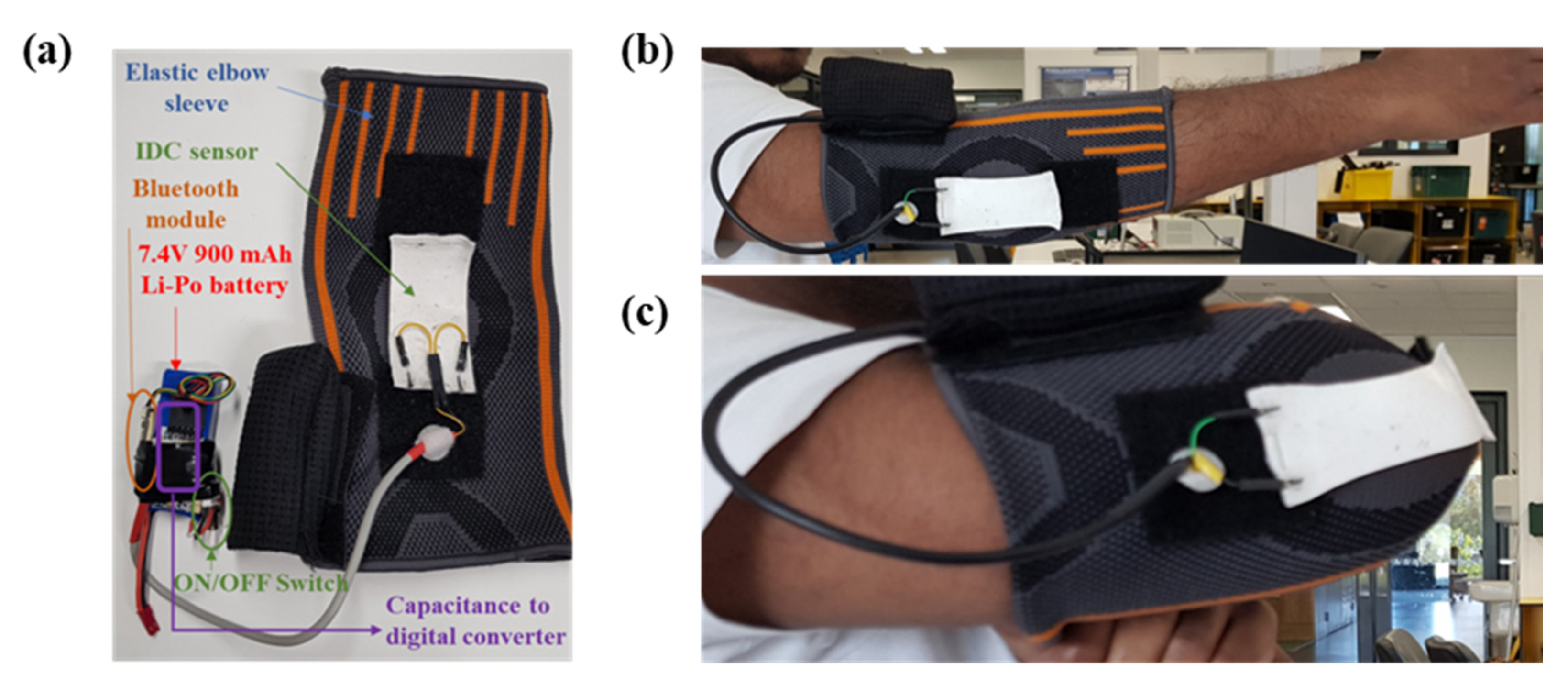
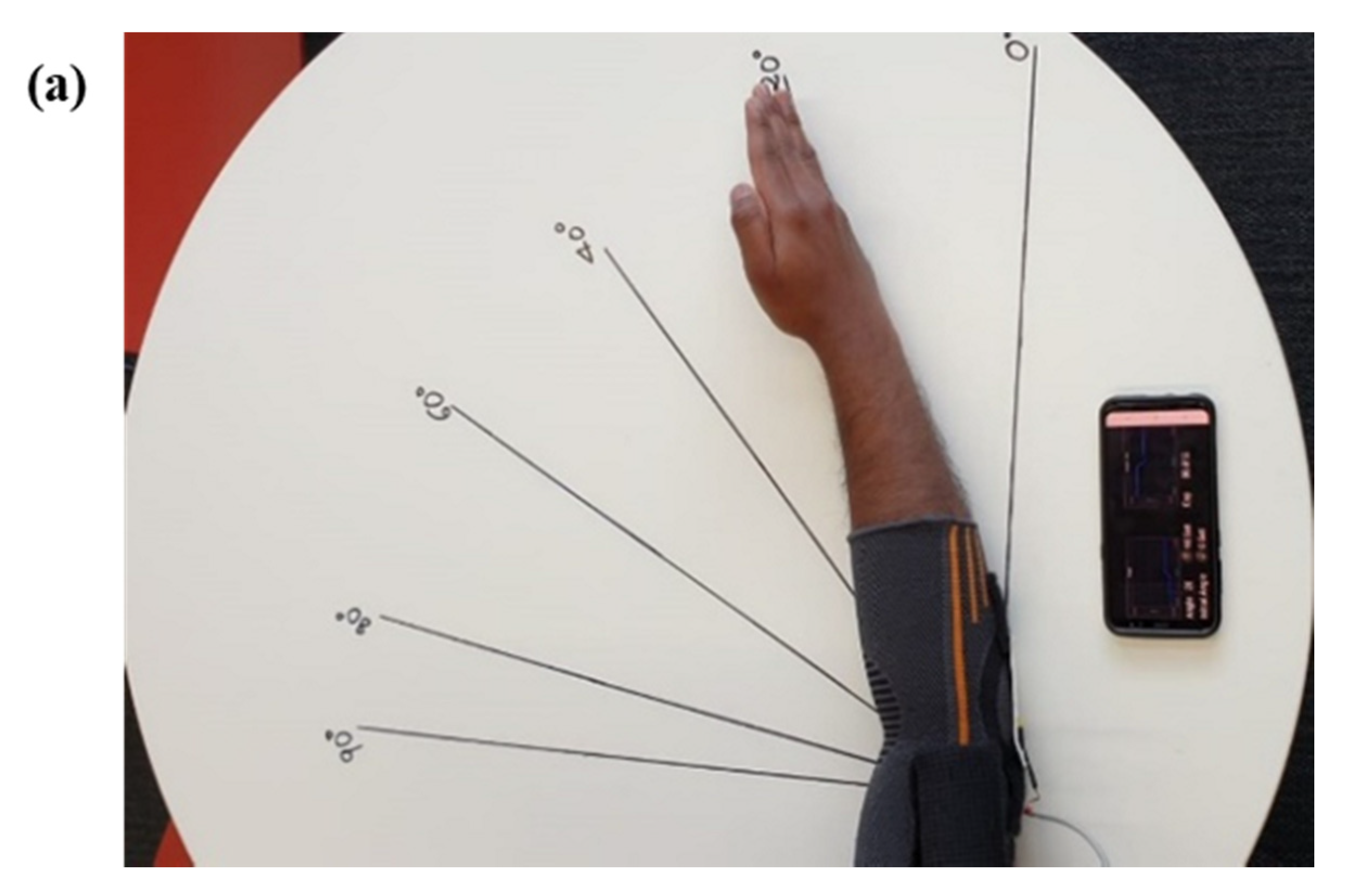
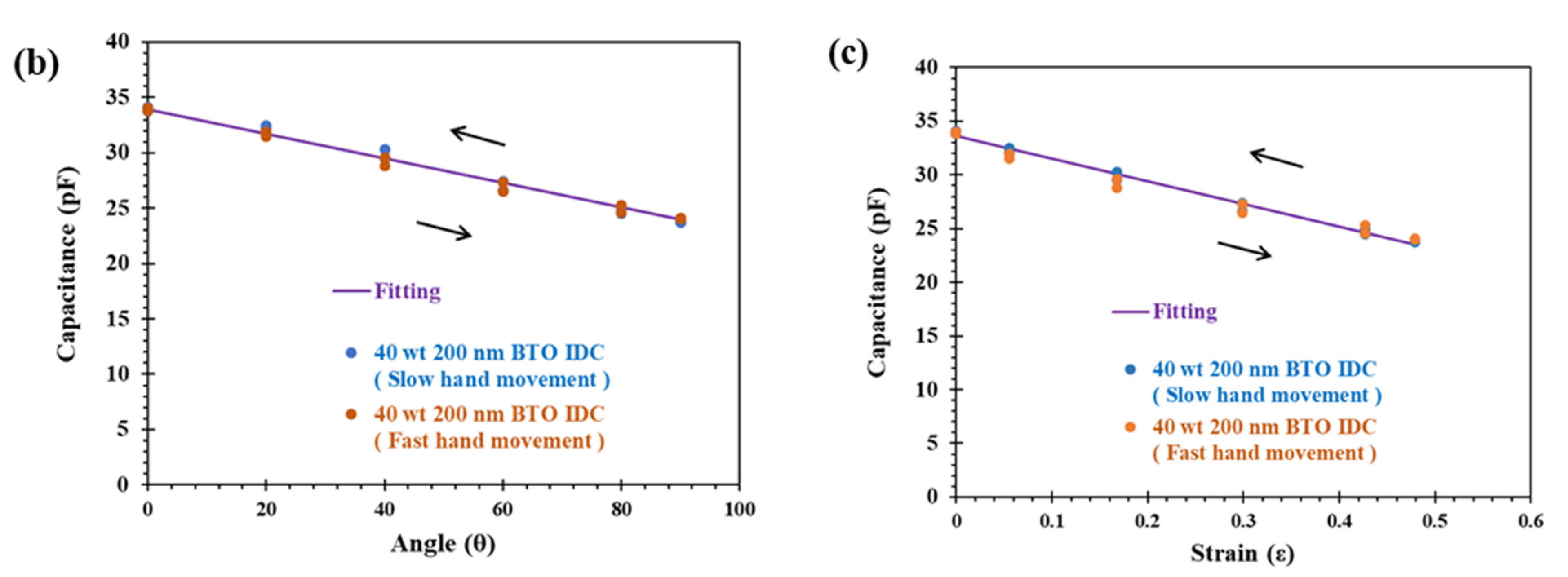
3.6. Application of Stretchable Sensor
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Cholleti, E.R.; Stringer, J.; Assadian, M.; Battmann, V.; Bowen, C.; Aw, K. Highly Stretchable Capacitive Sen-sor with Printed Carbon Black Electrodes on Barium Titanate Elastomer Composite. Sensors 2019, 19, 42. [Google Scholar] [CrossRef]
- Fujimoto, K.T.; Watkins, J.K.; Phero, T.; Litteken, D.; Tsai, K.; Bingham, T.; Ranganatha, K.L.; Johnson, B.C.; Deng, Z.; Jaques, B.; et al. Aerosol jet printed capacitive strain gauge for soft structural materials. npj Flex. Electron. 2020, 4, 1–9. [Google Scholar] [CrossRef]
- Zens, M.; Ruhhammer, J.; Goldschmidtboeing, F.; Feucht, M.J.; Bernstein, A.; Niemeyer, P.; Mayr, H.O.; Woias, P. Polydimethylsiloxane strain gauges for biomedical applications. In Proceedings of the 2015 Transducers-2015 18th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Anchorage, AK, USA, 21–25 June 2015. [Google Scholar]
- Afsarimanesh, N.; Nag, A.; Alahi, E.E.; Han, T.; Mukhopadhyay, S.C. Interdigital sensors: Biomedical, environmental and industrial applications. Sens. Actuators A Phys. 2020, 305, 111923. [Google Scholar] [CrossRef]
- Zhao, Y.; Huang, X. Mechanisms and Materials of Flexible and Stretchable Skin Sensors. Micromachines 2017, 8, 69. [Google Scholar] [CrossRef]
- Matsuzaki, R.; Keating, T.; Todoroki, A.; Hiraoka, N. Rubber-based strain sensor fabricated using photolithography for intelligent tires. Sens. Actuators A Phys. 2008, 148, 1–9. [Google Scholar] [CrossRef]
- Lu, N.; Kim, D.-H. Flexible and Stretchable Electronics Paving the Way for Soft Robotics. Soft Robot. 2014, 1, 53–62. [Google Scholar] [CrossRef]
- Yeo, J.C.; Yap, H.K.; Xi, W.; Wang, Z.; Yeow, C.-H.; Lim, C.T. Flexible and Stretchable Strain Sensing Actuator for Wearable Soft Robotic Applications. Adv. Mater. Technol. 2016, 1. [Google Scholar] [CrossRef]
- Tan, C.; Dong, Z.; Li, Y.; Zhao, H.; Huang, X.; Zhou, Z.; Jiang, J.-W.; Long, Y.-Z.; Jiang, P.; Zhang, T.-Y.; et al. A high performance wearable strain sensor with advanced thermal management for motion monitoring. Nat. Commun. 2020, 11, 1–10. [Google Scholar] [CrossRef]
- Atalay, O.; Atalay, A.; Gafford, J.; Wang, H.; Wood, R.; Walsh, C. A Highly Stretchable Capacitive-Based Strain Sensor Based on Metal Deposition and Laser Rastering. Adv. Mater. Technol. 2017, 2, 1700081. [Google Scholar] [CrossRef]
- Xiong, Y.; Shen, Y.; Tian, L.; Hu, Y.; Zhu, P.; Sun, R.; Wong, C.-P. A flexible, ultra-highly sensitive and stable capacitive pressure sensor with convex microarrays for motion and health monitoring. Nano Energy 2020, 70, 104436. [Google Scholar] [CrossRef]
- Zhang, P.; Chen, Y.C.; Li, Y.X.; Zhang, Y.; Zhang, J.; Huang, L.S. A Flexible Strain Sensor Based on the Porous Structure of a Carbon Black/Carbon Nanotube Conducting Network for Human Motion Detection. Sensors 2020, 20, 1154. [Google Scholar] [CrossRef] [PubMed]
- Shintake, J.; Nagai, T.; Ogishima, K. Sensitivity Improvement of Highly Stretchable Capacitive Strain Sensors by Hierarchical Auxetic Structures. Front. Robot. AI 2019, 6, 127. [Google Scholar] [CrossRef]
- Atalay, O. Textile-Based, Interdigital, Capacitive, Soft-Strain Sensor for Wearable Applications. Materials 2018, 11, 768. [Google Scholar] [CrossRef] [PubMed]
- Shintake, J.; Piskarev, E.; Jeong, S.H.; Floreano, D. Ultrastretchable Strain Sensors Using Carbon Black-Filled Elastomer Composites and Comparison of Capacitive Versus Resistive Sensors. Adv. Mater. Technol. 2018, 3, 1700284. [Google Scholar] [CrossRef]
- Liu, X.; Feng, S.; Chen, X.; Zhao, Y. Research Technologies of Projected Capacitive Touch Screen. In Proceedings of the 2015 5th International Conference on Computer Sciences and Automation Engineering, Sanya, China, 14–15 November 2015; pp. 63–68. [Google Scholar]
- Wada, S.; Hoshina, T.; Yasuno, H.; Nam, S.M.; Kakemoto, H.; Tsurumi, T.; Yashima, M. Size dependence of dielectric properties for nm-sized barium titanate crystallites and its origin. J. Korean Phys. Soc. 2005, 46, 303–307. [Google Scholar]
- Wada, S.; Yasuno, H.; Hoshina, T.; Nam, S.-M.; Kakemoto, H.; Tsurumi, T. Preparation of nm-Sized Barium Titanate Fine Particles and Their Powder Dielectric Properties. Jpn. J. Appl. Phys. 2003, 42, 6188–6195. [Google Scholar] [CrossRef]
- Paul, S.; Kumar, D.; Gagandeep, M. Barium titanate as a ferroelectric and piezoelectric ceramics. J. Biosphere. 2013, 2, 55–58. [Google Scholar]
- Cholleti, E.R.; Stringer, J.; Kelly, P.; Bowen, C.; Aw, K. The effect of barium titanate ceramic loading on the stress relaxation behavior of barium titanate-silicone elastomer composites. Polym. Eng. Sci. 2020, 60, 3086–3094. [Google Scholar] [CrossRef]
- Cholleti, E.R.; Stringer, J.; Bowen, C.; Lo, C.-Y.; Aw, K. Barium Titanate Elastomer composite based capacitive stretch sensor. In Proceedings of the 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, 8–12 July 2019; pp. 1233–1237. [Google Scholar]
- Tesla, N. Electrical Condenser. Google Patents US464667A, 8 December 1891. [Google Scholar]
- Love, A.E.H. Some Electrostatic Distributions in two Dimensions. Proc. Lond. Math. Soc. 1924, 2, 337–369. [Google Scholar] [CrossRef]
- Mortley, W.S. Pulse Compression by Dispersive Gratings on Crystal Quartz. Marconi Rev. 1965, 28, 273–290. [Google Scholar]
- Alley, G. Interdigital Capacitors and Their Application to Lumped-Element Microwave Integrated Circuits. IEEE Trans. Microw. Theory Tech. 1970, 18, 1028–1033. [Google Scholar] [CrossRef]
- Li, J.; Longtin, J.P.; Tankiewicz, S.; Gouldstone, A.; Sampath, S. Interdigital capacitive strain gauges fabricated by direct-write thermal spray and ultrafast laser micromachining. Sens. Actuators A Phys. 2007, 133, 1–8. [Google Scholar] [CrossRef]
- Zeiser, R.; Fellner, T.; Wilde, J. Capacitive strain gauges on flexible polymer substrates for wireless, intelligent systems. J. Sens. Sens. Syst. 2014, 3, 77–86. [Google Scholar] [CrossRef]
- Shin, H.-S.; Bergbreiter, S. Effect of finger geometries on strain response of interdigitated capacitor based soft strain sensors. Appl. Phys. Lett. 2018, 112, 044101. [Google Scholar] [CrossRef]
- Houghton, T.; Vanjaria, J.; Murphy, T.; Yu, H. Stretchable Capacitive Strain Sensors Based on a Novel Polymer Composite Blend. In Proceedings of the 2017 IEEE 67th Electronic Components and Technology Conference (ECTC), Orlando, FL, USA, 30 May–2 June 2017; pp. 2263–2268. [Google Scholar]
- Steck, D.; Qu, J.; Kordmahale, S.B.; Tscharnuter, D.; Muliana, A.; Kameoka, J. Mechanical responses of Ecoflex silicone rubber: Compressible and incompressible behaviors. J. Appl. Polym. Sci. 2019, 136, 47025. [Google Scholar] [CrossRef]
- Kim, B.; Lee, S.B.; Lee, J.; Cho, S.; Park, H.; Yeom, S.; Park, S.H. A comparison among Neo-Hookean model, Mooney-Rivlin model, and Ogden model for chloroprene rubber. Int. J. Precis. Eng. Manuf. 2012, 13, 759–764. [Google Scholar] [CrossRef]
- Choi, D.Y.; Kim, M.H.; Oh, Y.S.; Jung, S.-H.; Jung, J.H.; Sung, H.J.; Lee, H.W.; Lee, H.M. Highly Stretchable, Hysteresis-Free Ionic Liquid-Based Strain Sensor for Precise Human Motion Monitoring. ACS Appl. Mater. Interfaces 2017, 9, 1770–1780. [Google Scholar] [CrossRef] [PubMed]
- Tobajas, R.; Elduque, D.; Ibarz, E.; Javierre, C.; Canteli, A.F.; Gracia, L. Visco-Hyperelastic Model with Damage for Simulating Cyclic Thermoplastic Elastomers Behavior Applied to an Industrial Component. Polymers 2018, 10, 668. [Google Scholar] [CrossRef] [PubMed]
- Ju, M.; Jmal, H.; Dupuis, R.; Aubry, E. Visco-hyperelastic constitutive model for modeling the quasi-static behavior of polyurethane foam in large deformation. Polym. Eng. Sci. 2014, 55, 1795–1804. [Google Scholar] [CrossRef]
- Bai, Y.; Liu, C.; Huang, G.; Li, W.; Feng, S. A Hyper-Viscoelastic Constitutive Model for Polyurea under Uniaxial Compressive Loading. Polymers 2016, 8, 133. [Google Scholar] [CrossRef] [PubMed]
- Jacob, G.C.; Starbuck, J.M.; Fellers, J.F.; Simunovic, S.; Boeman, R.G. Strain rate effects on the mechanical properties of polymer composite materials. J. Appl. Polym. Sci. 2004, 94, 296–301. [Google Scholar] [CrossRef]
- Cholleti, E.R.; Stringer, J.; Kelly, P.; Bowen, C.; Aw, K. Studying the creep behaviour of strechable capacitive sensor with barium titanate silicone elastomer composite. Sens. Actuators A Phys. 2021, 319, 112560. [Google Scholar] [CrossRef]
- Chen, J.Z.; Darhuber, A.A.; Troian, S.M.; Wagner, S. Capacitive sensing of droplets for microfluidic devices based on thermocapillary actuation. Lab A Chip 2004, 4, 473–480. [Google Scholar] [CrossRef] [PubMed]
- Qin, H.; Cai, Y.; Dong, J.; Lee, Y.-S. Direct Printing of Capacitive Touch Sensors on Flexible Substrates by Additive E-Jet Printing with Silver Nanoinks. In Proceedings of the Asme 11th International Manufacturing Science and Engineering Conference, Blacksburg, WV, USA, 27 June–1 July 2016. [Google Scholar]
- Popielarz, R.; Chiang, C.K.; Nozaki, A.R.; Obrzut, J. Dielectric Properties of Polymer/Ferroelectric Ceramic Composites from 100 Hz to 10 GHz. Macromolecules 2001, 34, 5910–5915. [Google Scholar] [CrossRef]
- Eom, S.; Lim, S. Stretchable Complementary Split Ring Resonator (CSRR)-Based Radio Frequency (RF) Sensor for Strain Direction and Level Detection. Sensors 2016, 16, 1667. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.-R.; Kim, J.-H.; Park, J.-W. Wearable and Transparent Capacitive Strain Sensor with High Sensitivity Based on Patterned Ag Nanowire Networks. ACS Appl. Mater. Interfaces 2017, 9, 26407–26416. [Google Scholar] [CrossRef] [PubMed]
- Faisal, A.I.; Majumder, S.; Mondal, T.; Cowan, D.; Naseh, S.; Deen, M.J. Monitoring Methods of Human Body Joints: State-of-the-Art and Research Challenges. Sensors 2019, 19, 2629. [Google Scholar] [CrossRef]
- Cassenti, B.N.; Staroselsky, A. Deformation and stability of compressible rubber O-rings. Int. J. Mech. Mater. Eng. 2017, 12, 1–13. [Google Scholar] [CrossRef]
- Ogden, R.W.; Saccomandi, G.; Sgura, I. Fitting hyperelastic models to experimental data. Comput. Mech. 2004, 34, 484–502. [Google Scholar] [CrossRef]
- Bidhendi, A.J.; Li, H.; Geitmann, A. Modeling the nonlinear elastic behavior of plant epidermis. Botany 2020, 98, 49–64. [Google Scholar] [CrossRef]
- Bhagyashekar, M.; Rao, R. Characterization of Mechanical Behavior of Metallic and Non-metallic Particulate Filled Epoxy Matrix Composites. J. Reinf. Plast. Compos. 2008, 29, 30–42. [Google Scholar] [CrossRef]
- Kumar, A.; Ahmad, D.; Patra, K. Barium titanate particle filled silicone elastomer composite: Preparation and evaluation of morphology and mechanical behaviour. J. Phys. Conf. Ser. 2019, 1240, 012049. [Google Scholar] [CrossRef]
- Case, J.C.; White, E.L.; Kramer, R.K. Soft Material Characterization for Robotic Applications. Soft Robot. 2015, 2, 80–87. [Google Scholar] [CrossRef]
- Genchi, G.G.; Marino, A.; Rocca, A.; Mattoli, V.; Ciofani, G. Barium titanate nanoparticles: Promising multitasking vectors in nanomedicine. Nanotechnology 2016, 27, 232001. [Google Scholar] [CrossRef] [PubMed]
- Ma, Z.; Li, S.; Wang, H.; Cheng, W.; Li, Y.; Pan, L.; Shi, Y. Advanced electronic skin devices for healthcare applications. J. Mater. Chem. B 2019, 7, 173–197. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Substrate Material of IDC | Capacitance of IDC (pF) at 0% Strain | Gauge Factor (G.F) | |
|---|---|---|---|
| at 50 % Strain | at 100 % Strain | ||
| Pristine Ecoflex 00-30 | 13.27 | −0.53 | −0.39 |
| 40 wt% 200 nm BTO | 31.4 | −0.62 | −0.45 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cholleti, E.R.; Stringer, J.; Kelly, P.; Bowen, C.; Aw, K. Mechanical Behaviour of Large Strain Capacitive Sensor with Barium Titanate Ecoflex Composite Used to Detect Human Motion. Robotics 2021, 10, 69. https://doi.org/10.3390/robotics10020069
Cholleti ER, Stringer J, Kelly P, Bowen C, Aw K. Mechanical Behaviour of Large Strain Capacitive Sensor with Barium Titanate Ecoflex Composite Used to Detect Human Motion. Robotics. 2021; 10(2):69. https://doi.org/10.3390/robotics10020069
Chicago/Turabian StyleCholleti, Eshwar Reddy, Jonathan Stringer, Piaras Kelly, Chris Bowen, and Kean Aw. 2021. "Mechanical Behaviour of Large Strain Capacitive Sensor with Barium Titanate Ecoflex Composite Used to Detect Human Motion" Robotics 10, no. 2: 69. https://doi.org/10.3390/robotics10020069
APA StyleCholleti, E. R., Stringer, J., Kelly, P., Bowen, C., & Aw, K. (2021). Mechanical Behaviour of Large Strain Capacitive Sensor with Barium Titanate Ecoflex Composite Used to Detect Human Motion. Robotics, 10(2), 69. https://doi.org/10.3390/robotics10020069