
Traveling Wave Solutions and Conservation Laws of a Generalized Chaffee–Infante Equation in (1+3) Dimensions

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Non-Topological Soliton Solutions
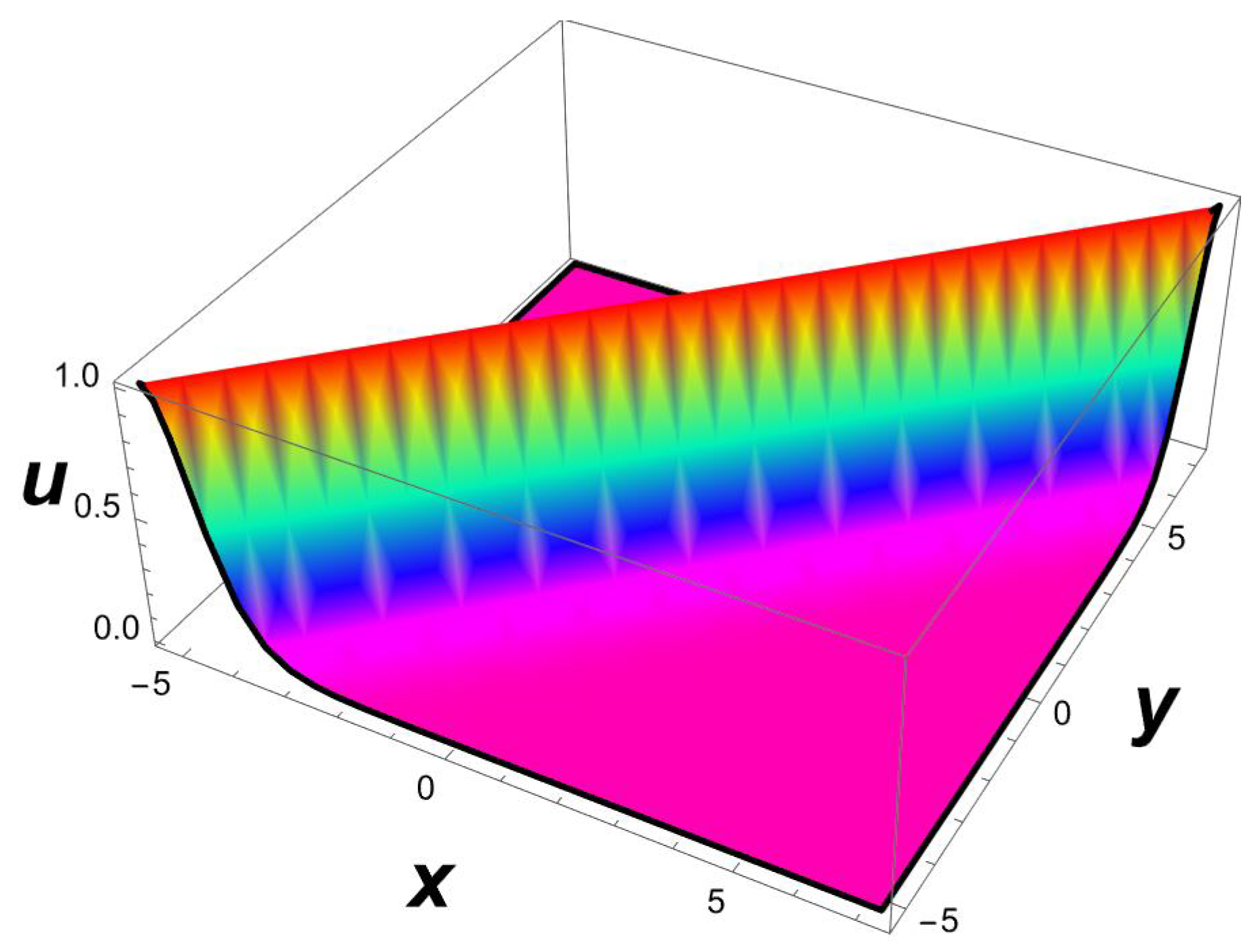
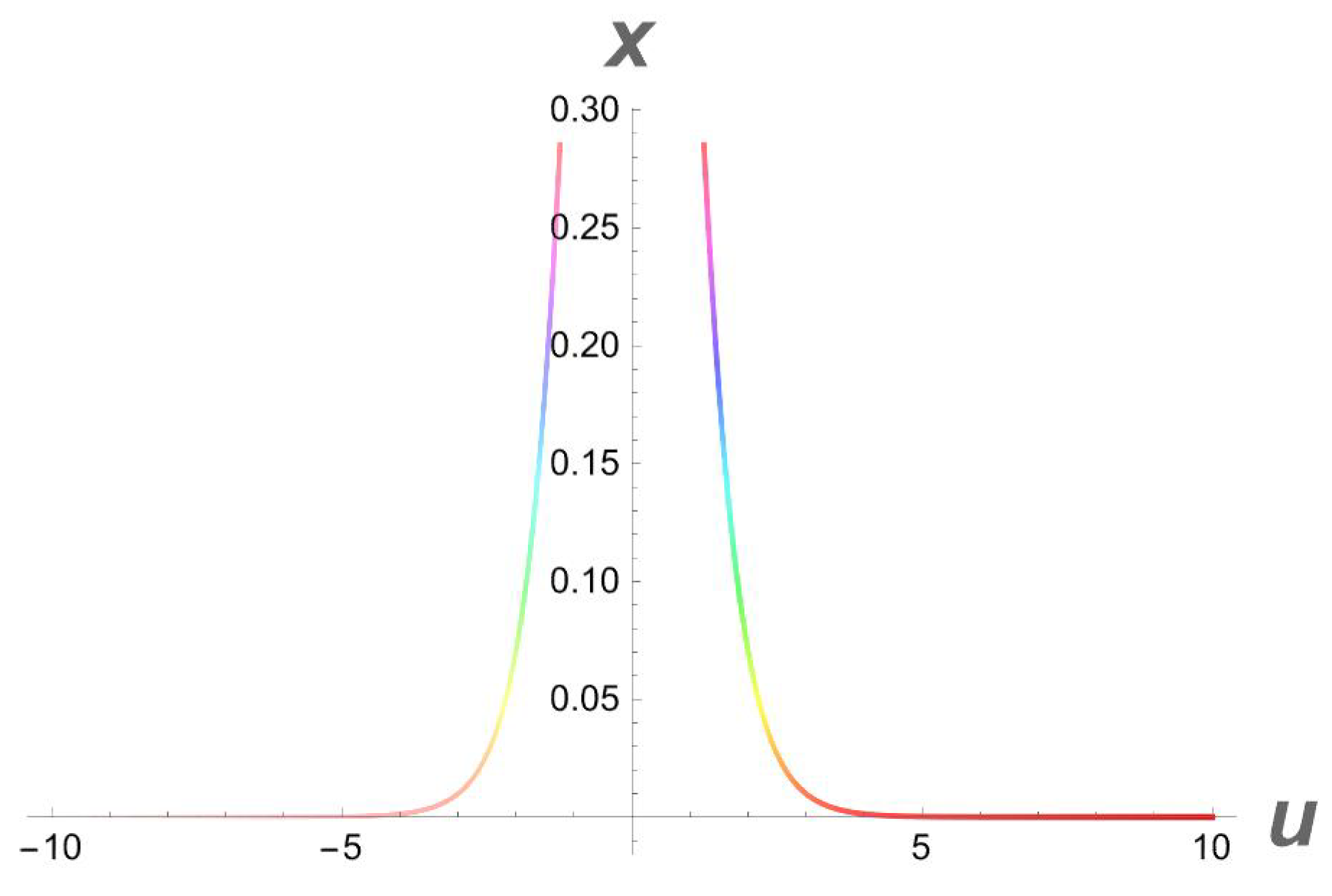
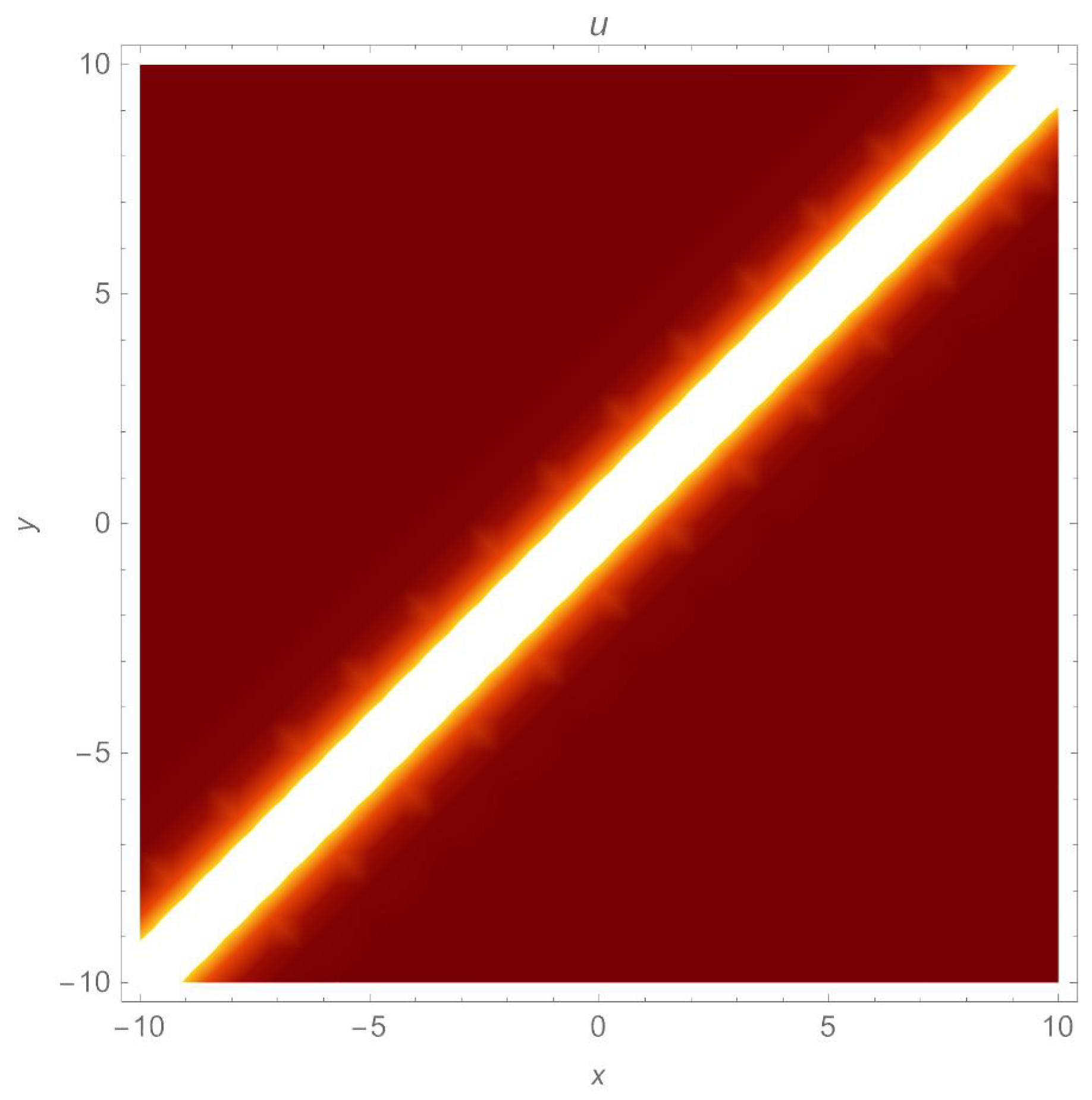
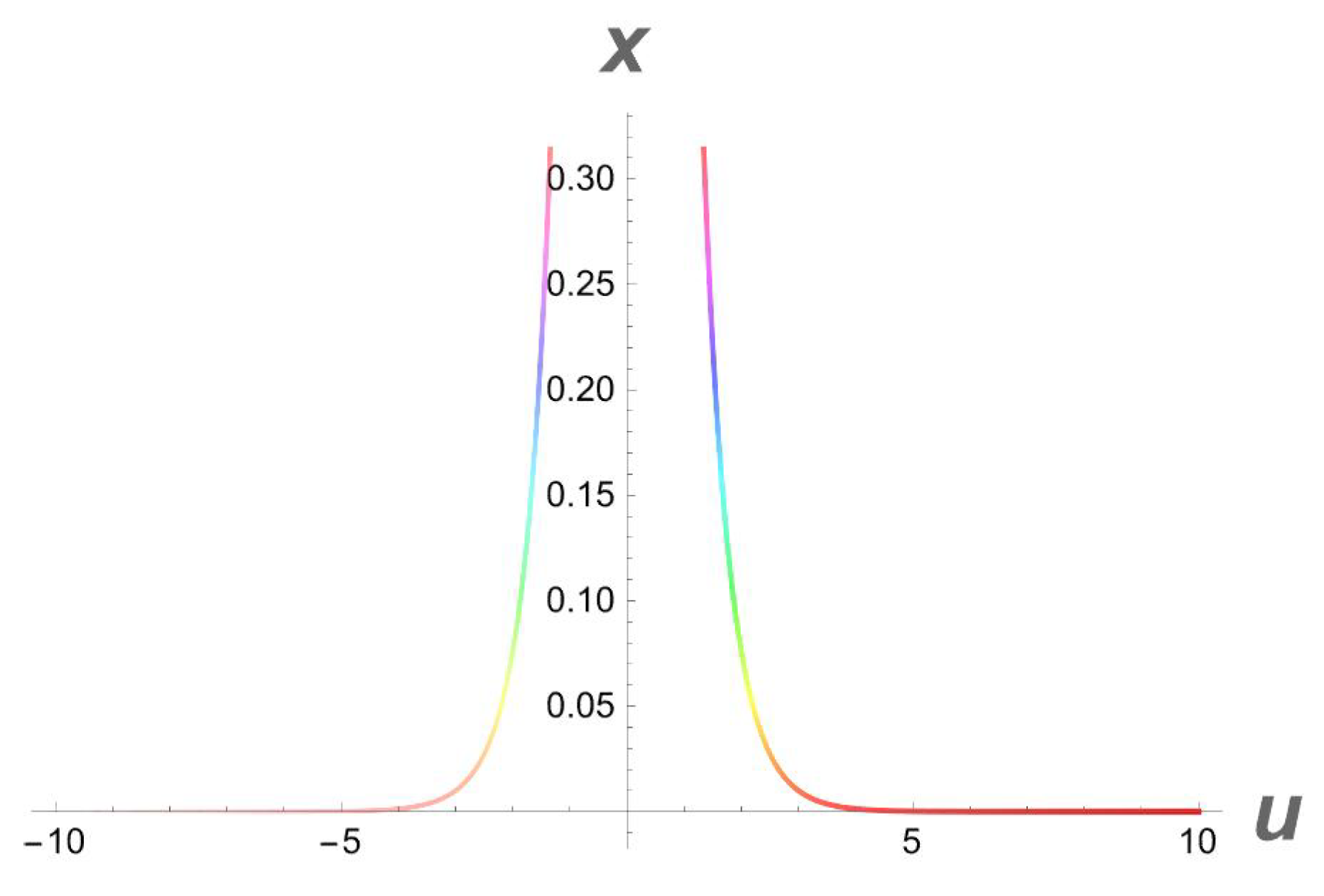
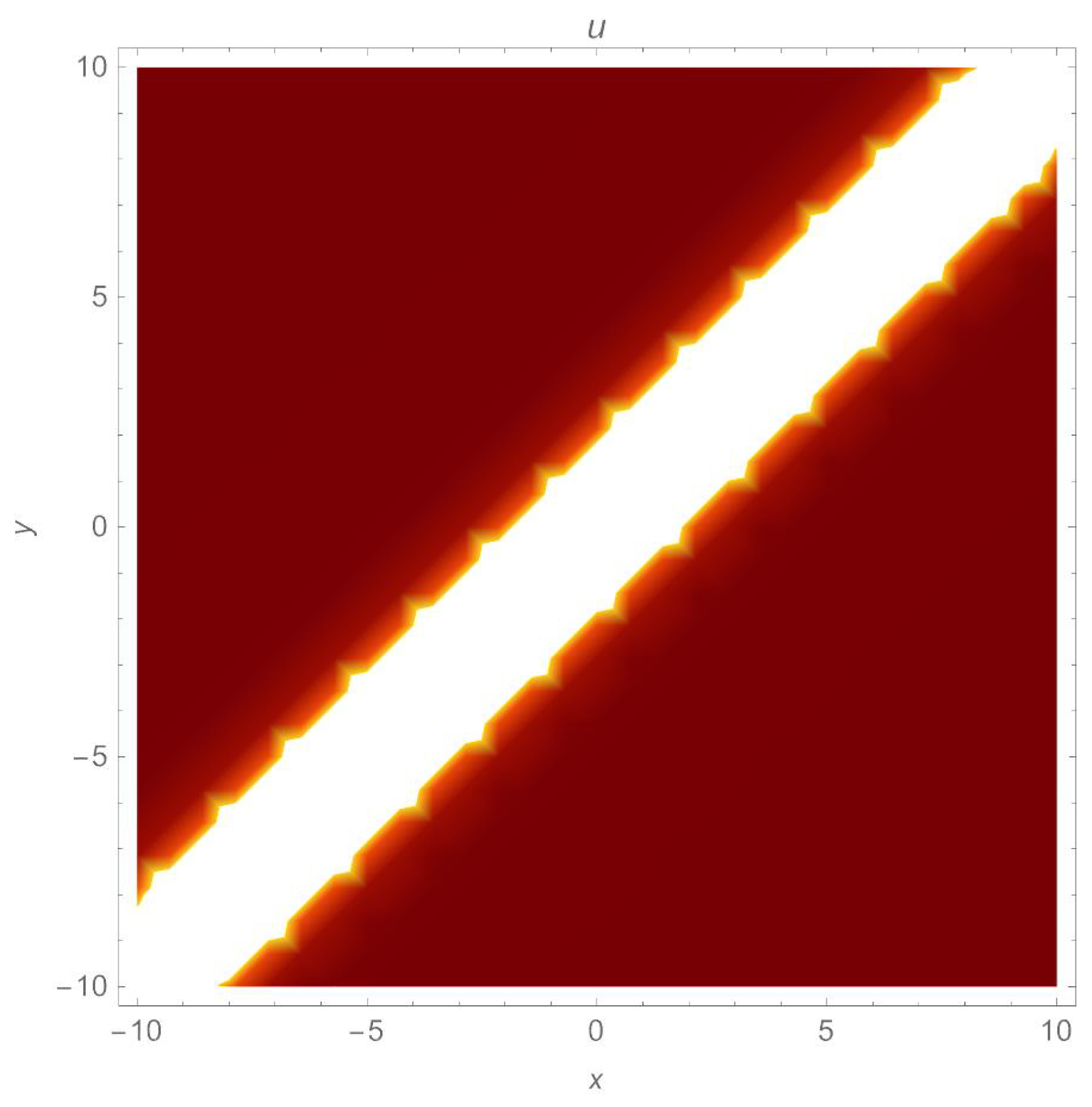
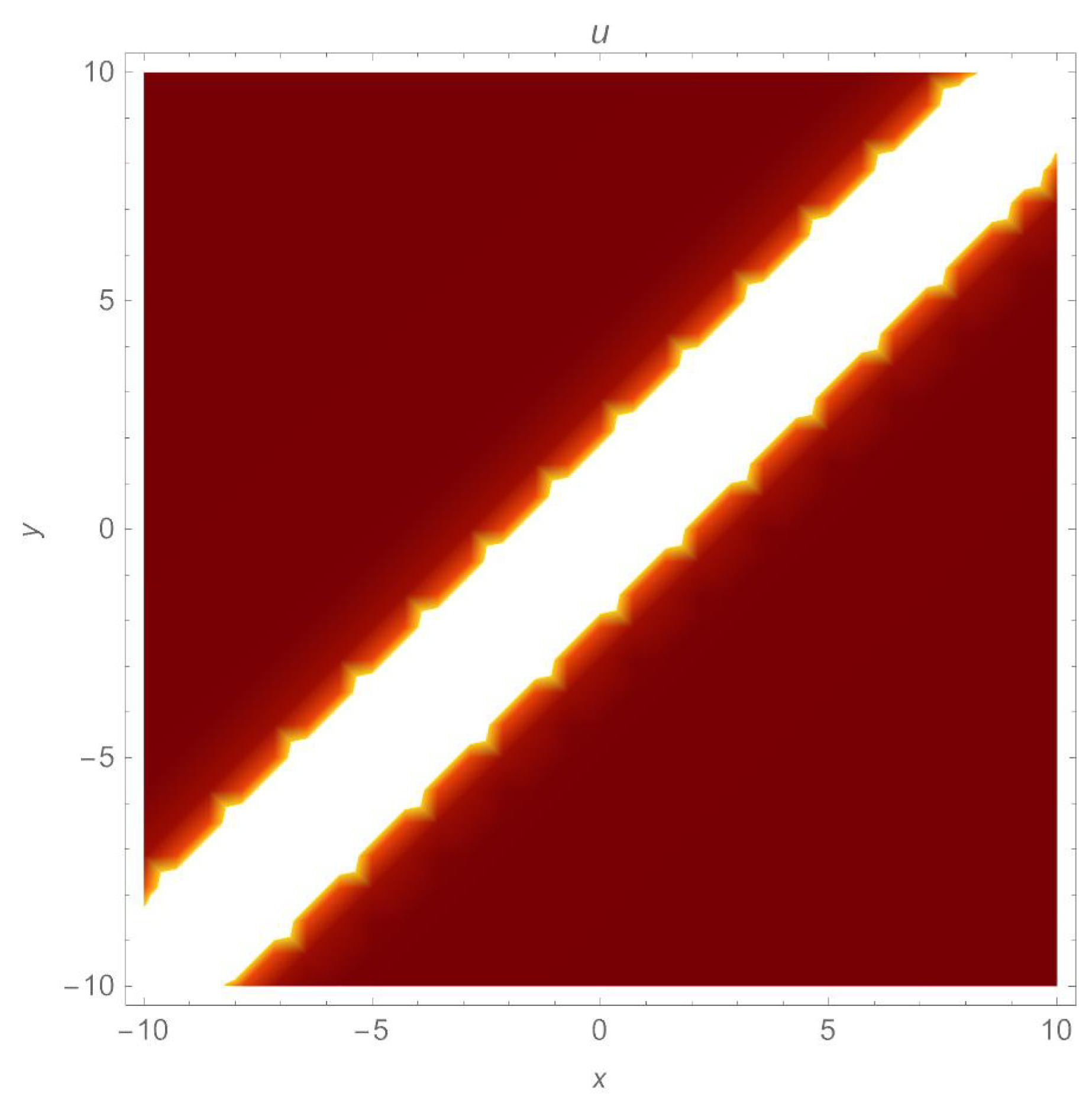
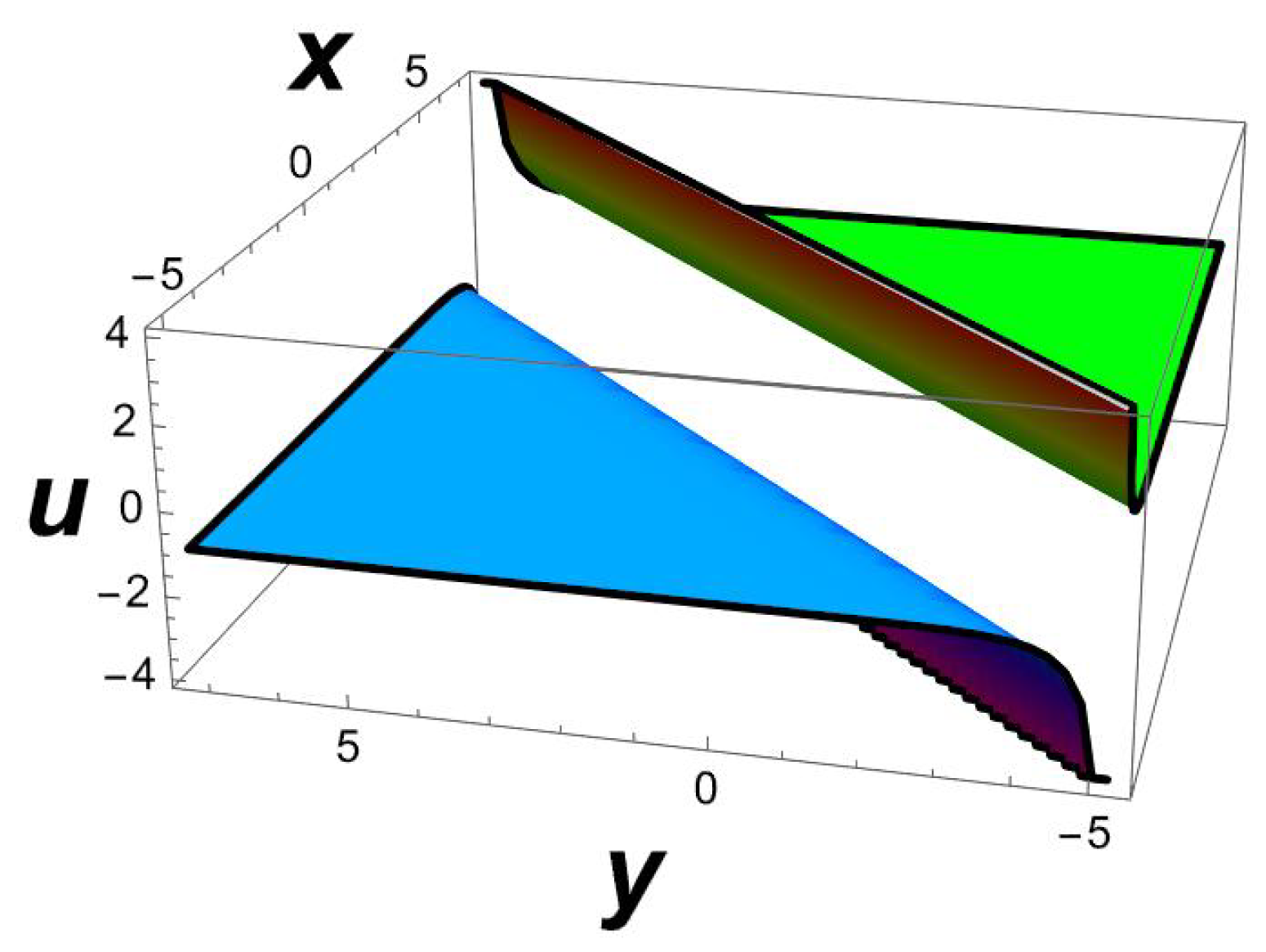
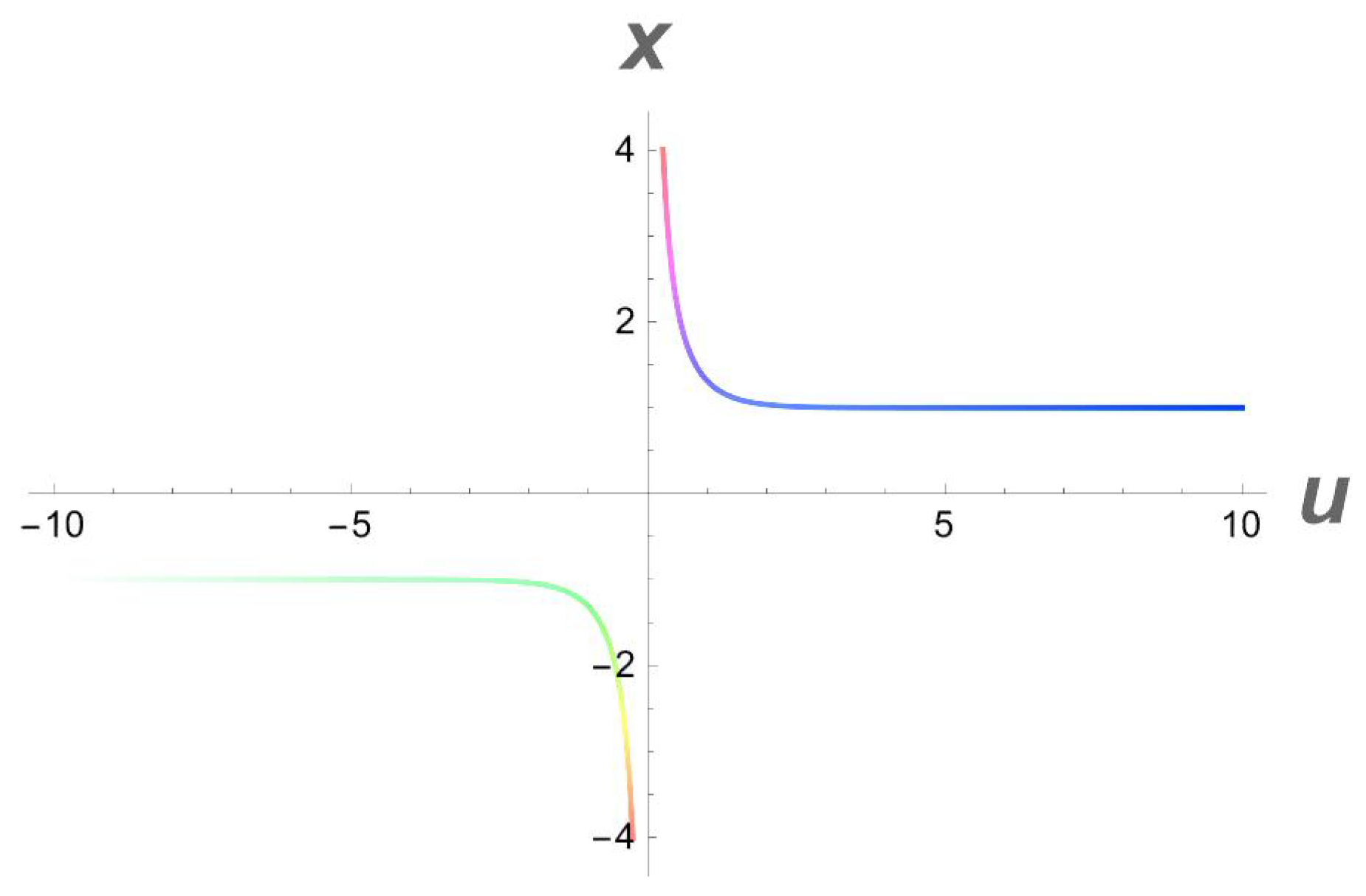
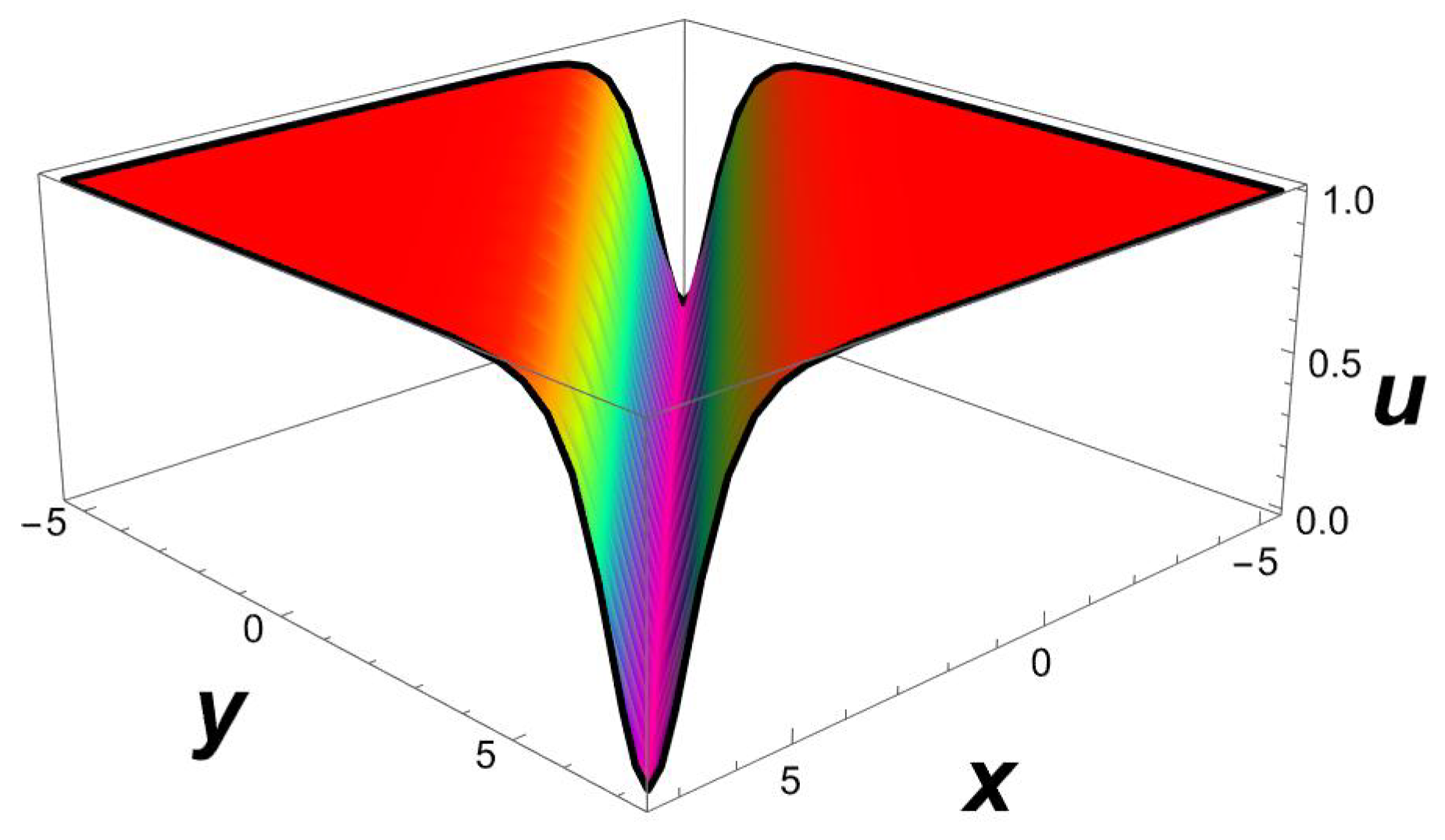
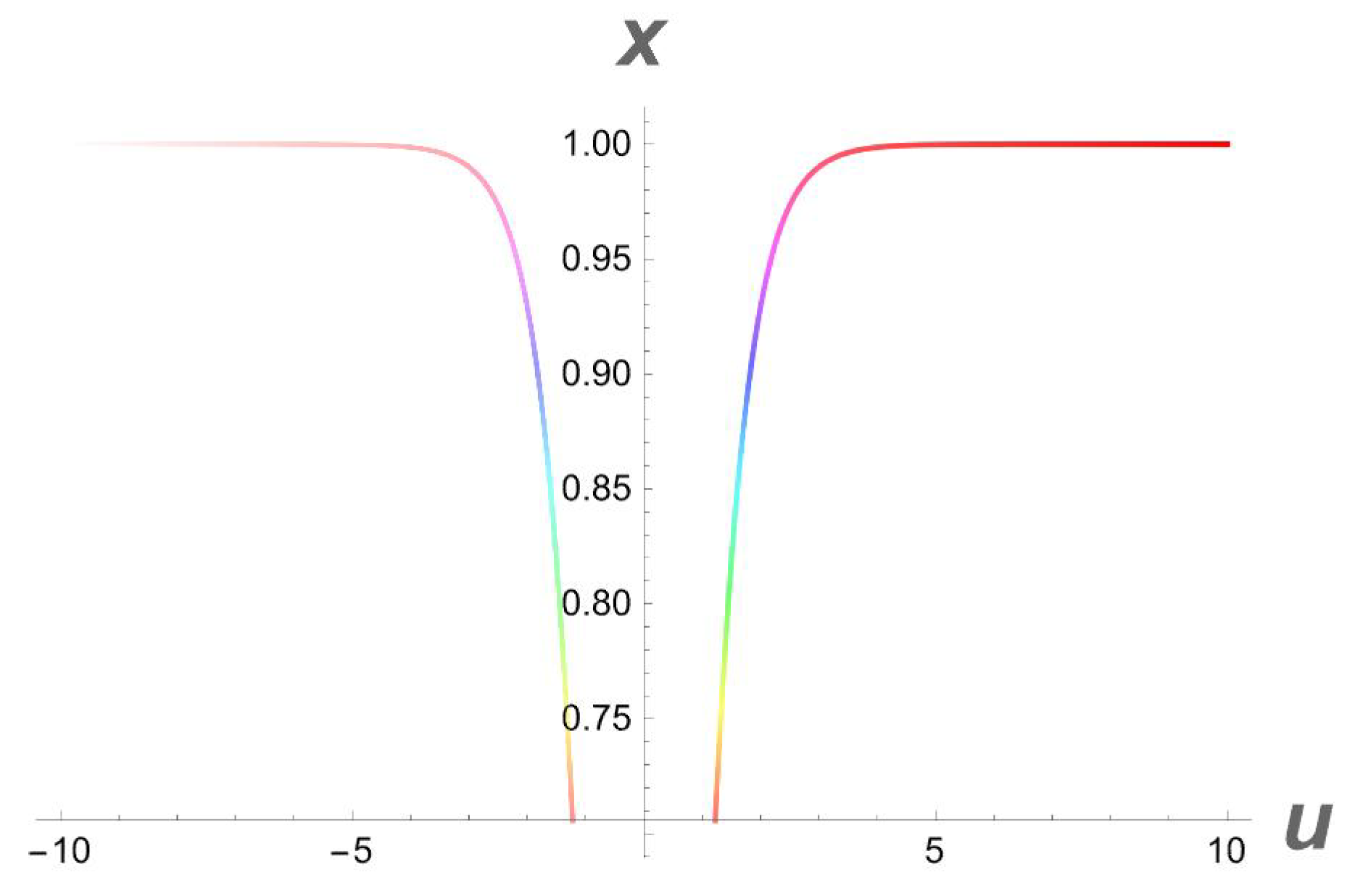
2.1. Singular Soliton Solutions
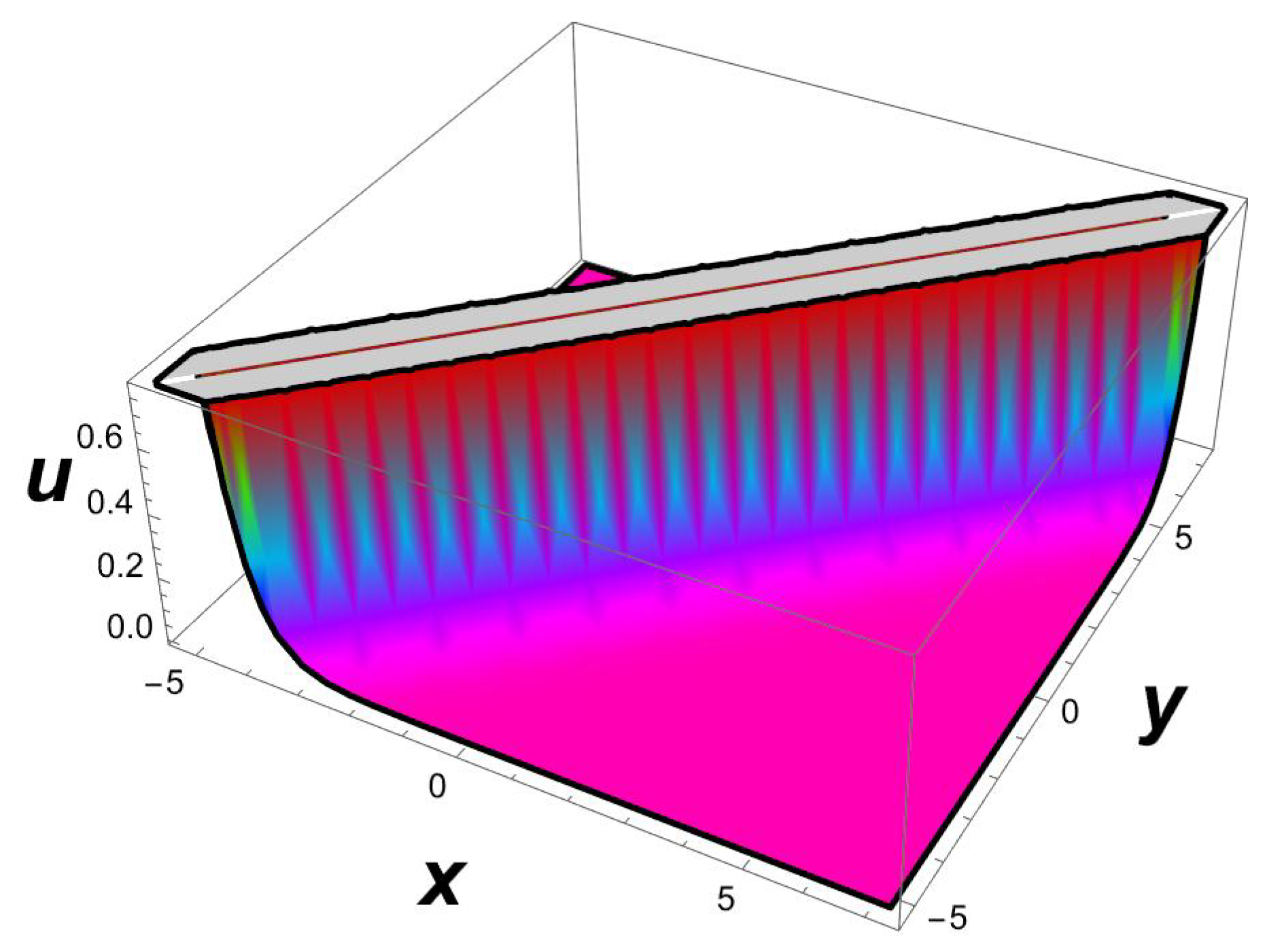
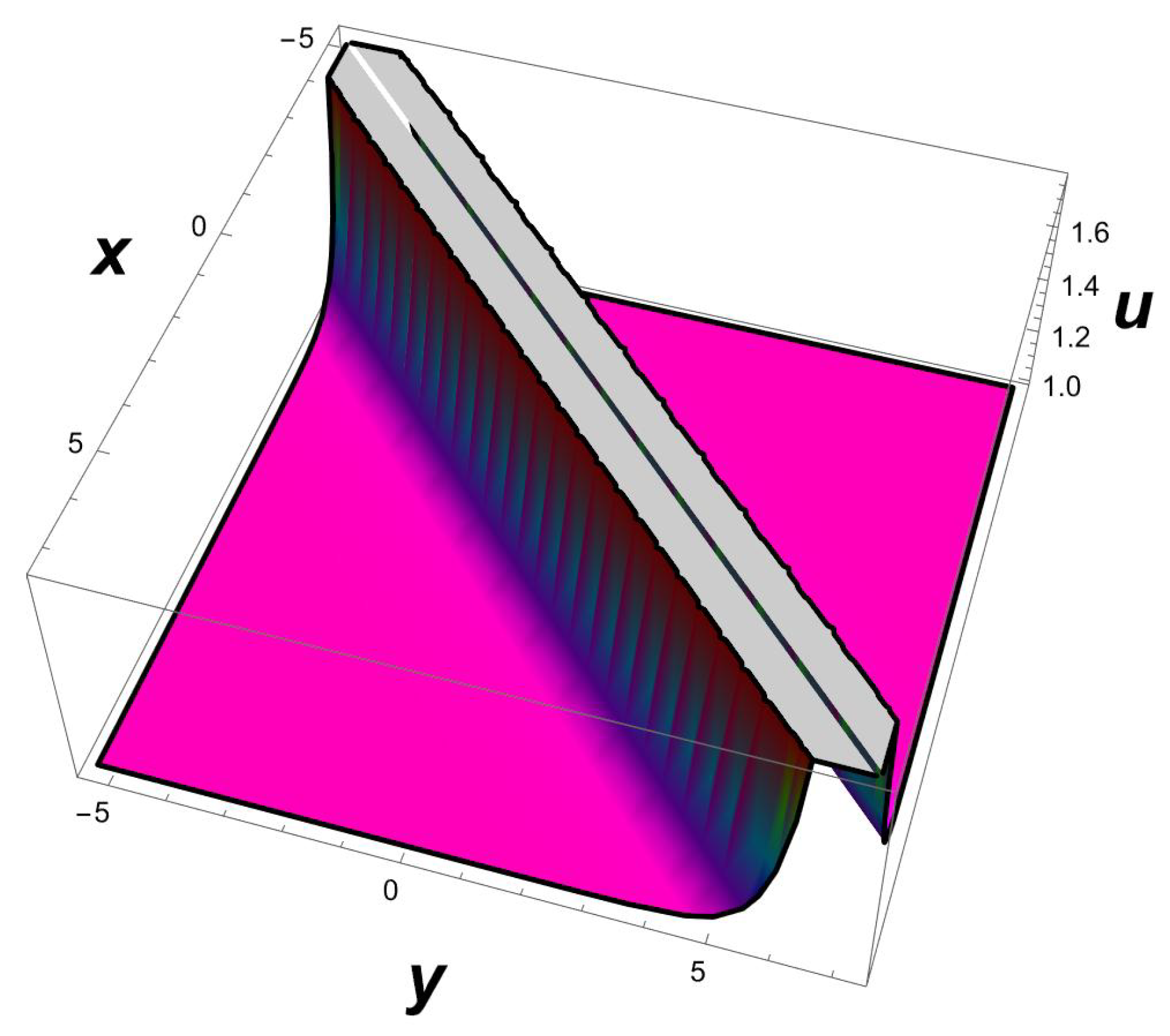
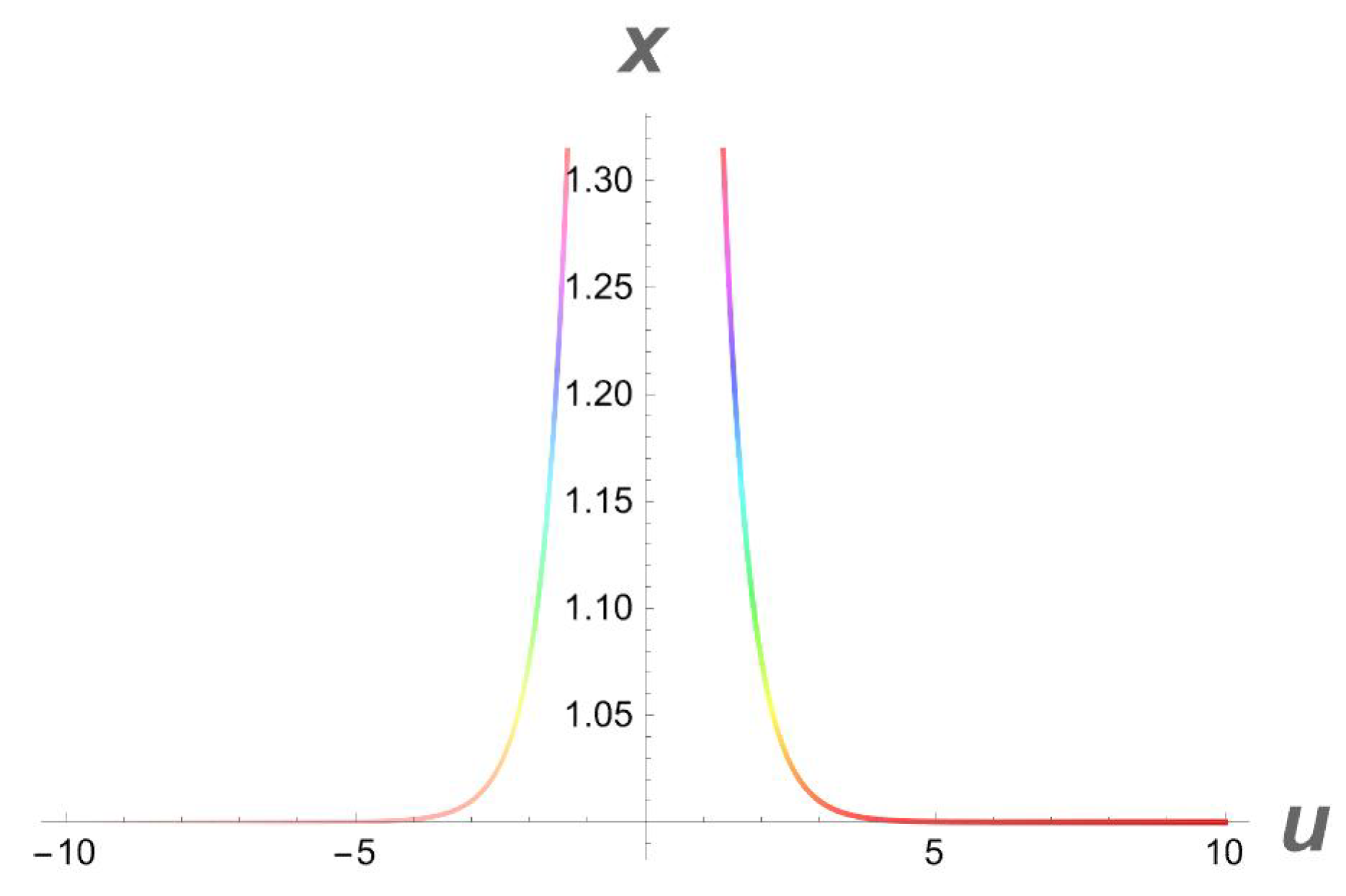
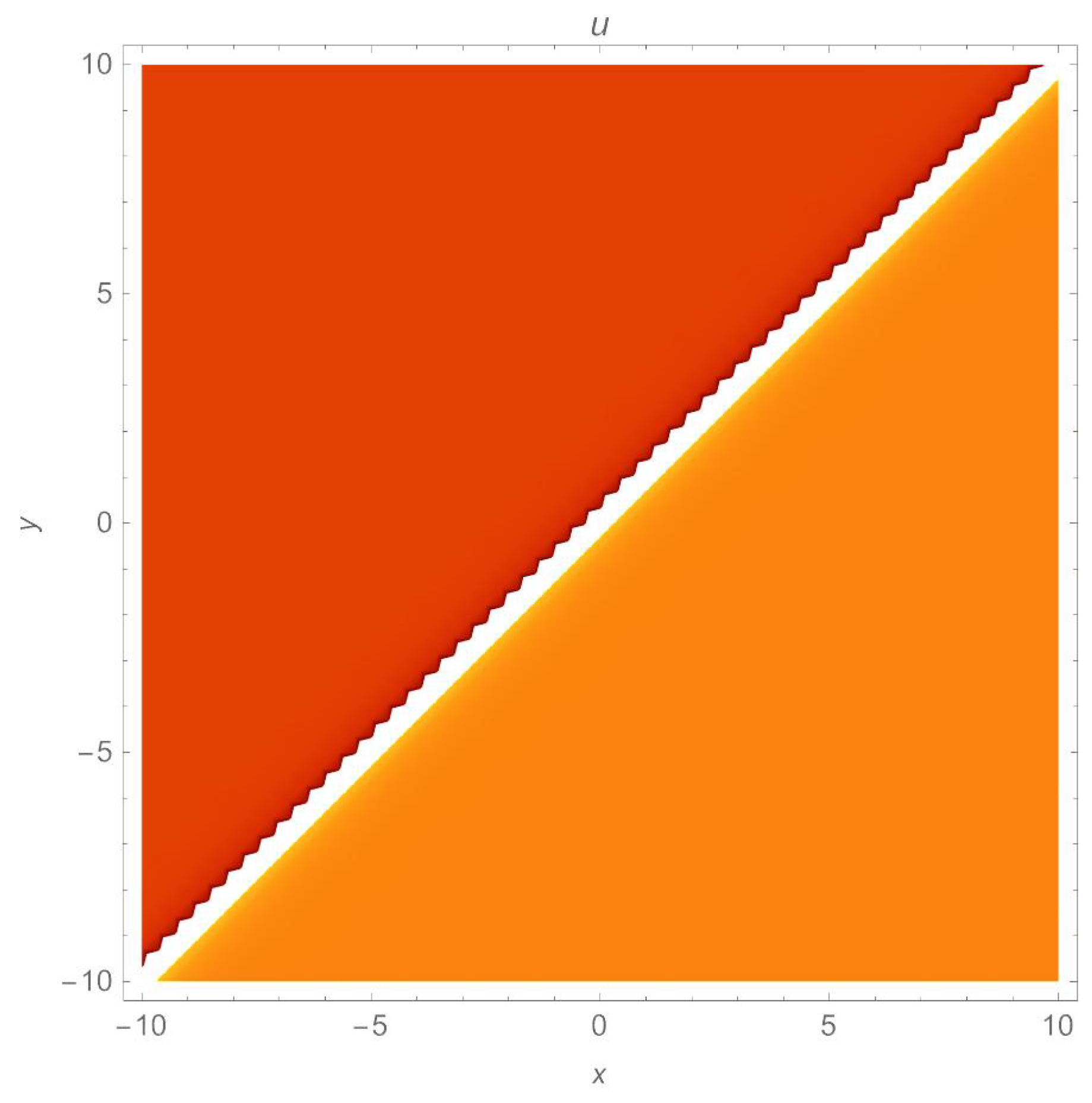
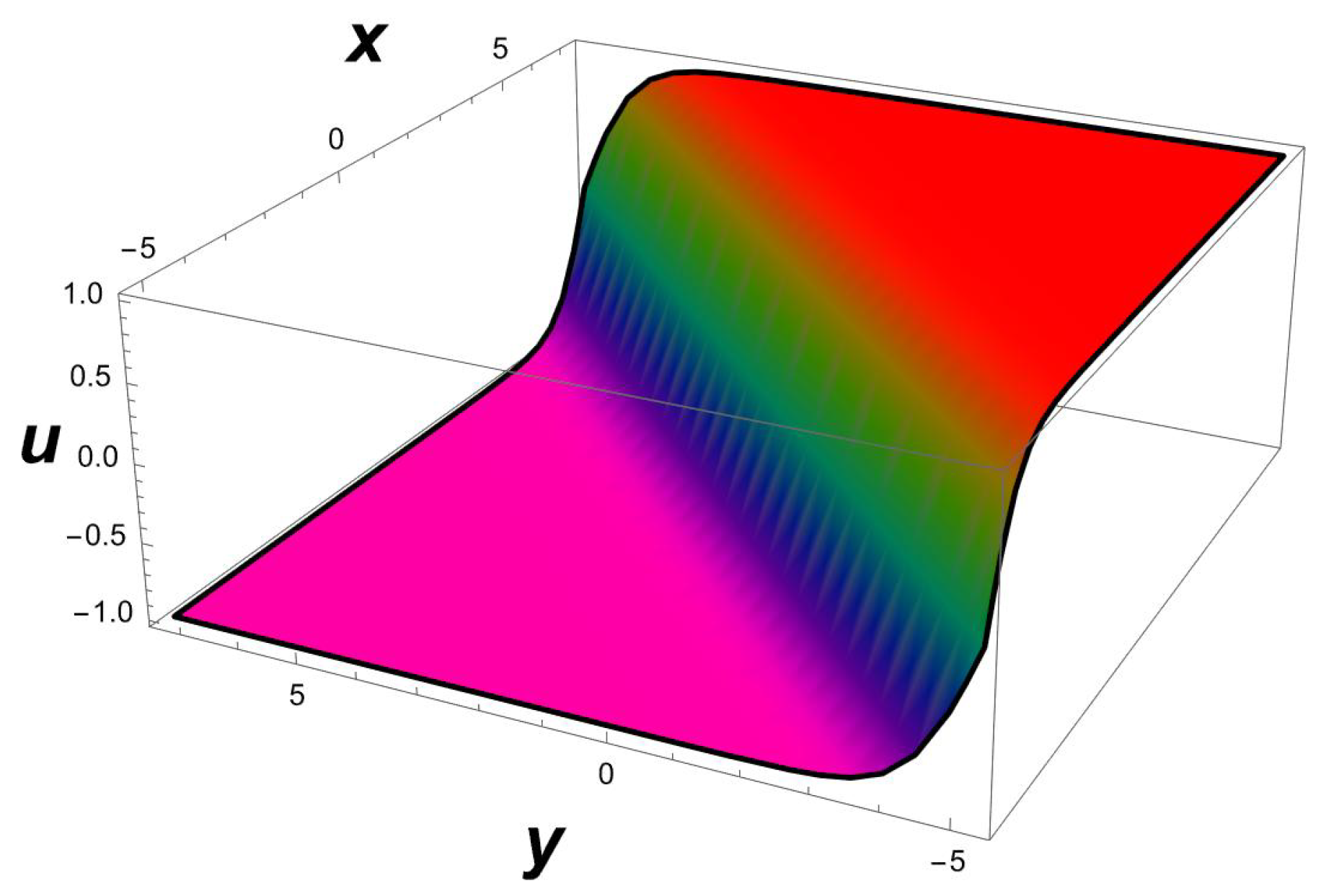
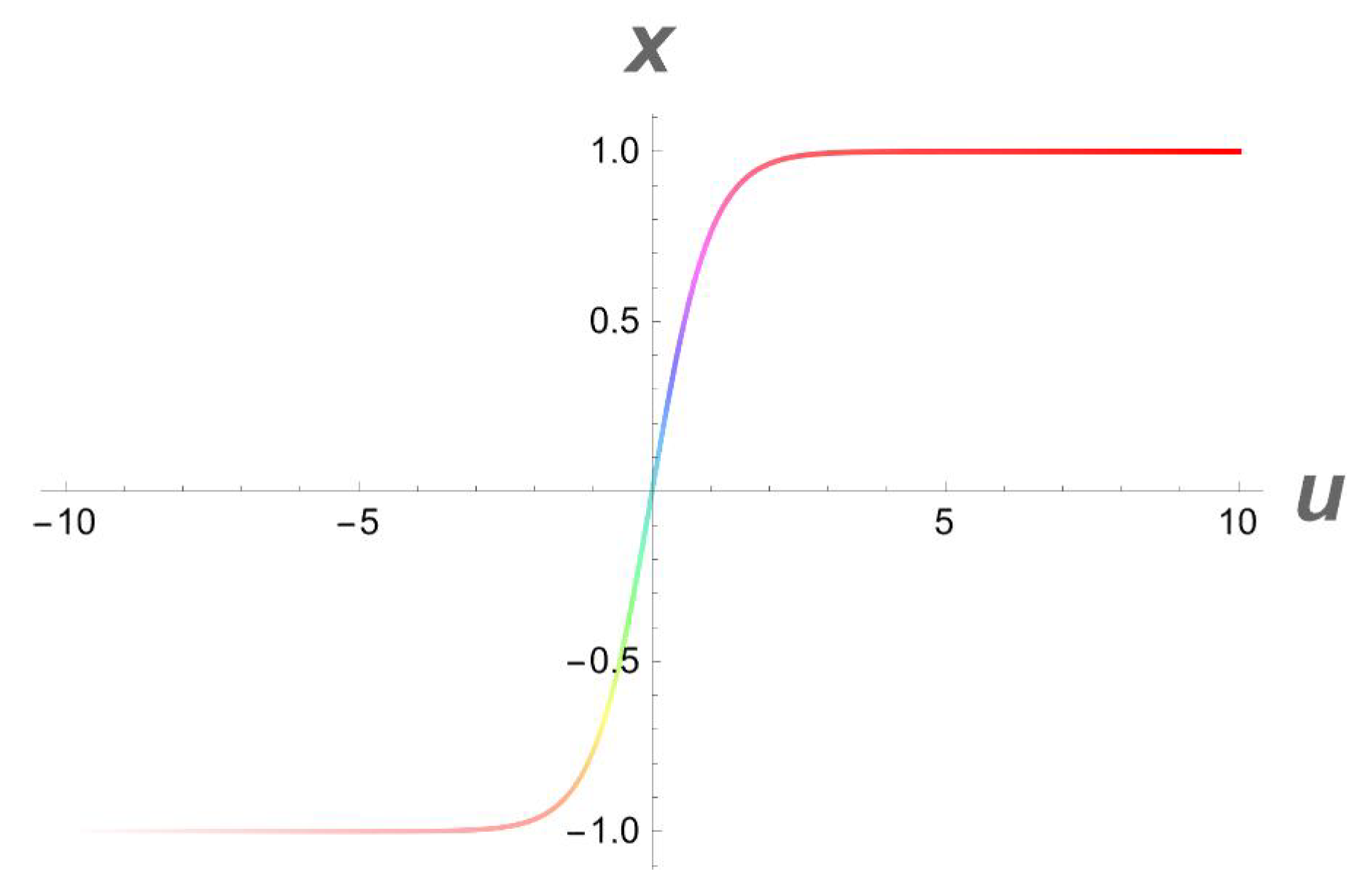
2.2. Dark Soliton Solution
3. Conservation Laws
4. Multiple Exp-Function Method
4.1. Application of the Multiple Exp-Function Method to (3)
4.1.1. One-Wave Solution of (3)
4.1.2. Two-Wave Solution of (3)
4.1.3. Three-Wave Solution of (3)
5. Concluding Remarks
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ma, W. Sasa-Satsuma type matrix integrable hierarchies and their Riemann–Hilbert problems and soliton solutions. Phys. D Nonlinear Phenom. 2023, 446, 133672. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, W.; Ma, W. Riemann-Hilbert problems and soliton solutions for a generalized coupled Sasa-Satsuma equation. Commun. Nonlinear Sci. Numer. Simul. 2023, 118, 107052. [Google Scholar] [CrossRef]
- Ma, W. Soliton solutions to constrained nonlocal integrable nonlinear Schrödinger hierarchies of type (−λ, λ). Int. J. Geom. Methods Mod. Phys. 2023, 7, 100515. [Google Scholar]
- Ma, W. Matrix integrable fifth-order mKdV equations and their soliton solutions. Chin. Phys. B 2023, 32, 020201. [Google Scholar] [CrossRef]
- Chen, S.; Lü, X. Observation of resonant solitons and associated integrable properties for nonlinear waves. Chaos Solitons Fractals 2022, 163, 112543. [Google Scholar] [CrossRef]
- He, X.-J.; Lü, X. M-lump solution, soliton solution and rational solution to a (3+1)-dimensional nonlinear model. Math. Comput. Simul. 2022, 197, 327–340. [Google Scholar] [CrossRef]
- Adem, A. Symbolic computation on exact solutions of a coupled Kadomtsev–Petviashvili equation: Lie symmetry analysis and extended tanh method. Comput. Math. Appl. 2017, 74, 1897–1902. [Google Scholar] [CrossRef]
- Muatjetjeja, B.; Adem, A. Rosenau-KdV equation coupling with the Rosenau-RLW equation: Conservation laws and exact solutions. Int. J. Nonlinear Sci. Numer. Simul. 2017, 18, 451–456. [Google Scholar] [CrossRef]
- Ye, R.; Zhang, Y.; Ma, W. Darboux transformation and dark vector soliton solutions for complex mKdV systems. Part. Differ. Equ. Appl. Math. 2021, 4, 100161. [Google Scholar] [CrossRef]
- Ma, W. Soliton solutions by means of Hirota bilinear forms. Part. Differ. Equ. Appl. Math. 2022, 5, 100220. [Google Scholar] [CrossRef]
- Constantin, P.; Foias, C.; Nicolaenko, B.; Temam, R. Integral Manifolds and Inertial Manifolds for Dissipative Partial Differential Equations; Springer: Berlin/Heidelberg, Germany, 1989. [Google Scholar]
- Sakthivel, R.; Chun, C. New soliton solutions of Chaffee-Infante equations using the exp-function method. Z. Naturforsch.-Sect. A J. Phys. Sci. 2010, 65, 197–202. [Google Scholar] [CrossRef]
- Mao, Y. Exact solutions to (2+1)-dimensional Chaffee–Infante equation. Pramana-J. Phys. 2018, 91, 9. [Google Scholar] [CrossRef]
- Wazwaz, A. New compactons, solitons and periodic solutions for nonlinear variants of the KdV and the KP equations. Chaos Solitons Fractals 2004, 22, 249–260. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sebogodi, M.C.; Muatjetjeja, B.; Adem, A.R. Traveling Wave Solutions and Conservation Laws of a Generalized Chaffee–Infante Equation in (1+3) Dimensions. Universe 2023, 9, 224. https://doi.org/10.3390/universe9050224
Sebogodi MC, Muatjetjeja B, Adem AR. Traveling Wave Solutions and Conservation Laws of a Generalized Chaffee–Infante Equation in (1+3) Dimensions. Universe. 2023; 9(5):224. https://doi.org/10.3390/universe9050224
Chicago/Turabian StyleSebogodi, Motshidisi Charity, Ben Muatjetjeja, and Abdullahi Rashid Adem. 2023. "Traveling Wave Solutions and Conservation Laws of a Generalized Chaffee–Infante Equation in (1+3) Dimensions" Universe 9, no. 5: 224. https://doi.org/10.3390/universe9050224
APA StyleSebogodi, M. C., Muatjetjeja, B., & Adem, A. R. (2023). Traveling Wave Solutions and Conservation Laws of a Generalized Chaffee–Infante Equation in (1+3) Dimensions. Universe, 9(5), 224. https://doi.org/10.3390/universe9050224