
The Finsler Spacetime Condition for (α,β)-Metrics and Their Isometries

 ,
, 
{kind=link}
{kind=link}
Abstract
1. Introduction
- 1.
- The necessary and sufficient conditions for an -metric to define a Finsler spacetime structure;
- 2.
- Determining the isometries of general -metrics.
2. Preliminaries
- 1.
- Positive two-homogeneity:
- 2.
- At any and in one (and then, in any) local chart around the Hessian:is nondegenerate.
- 3.
- There exists a connected conic subbundle with connected fibers such that on each g has a Lorentzian signature and L can be continuously extended as 0 to the boundary
- On a Finsler spacetime, there exists the following important subsets of :
- The conic subbundle where L is defined, smooth, and contains nondegenerate Hessians is called the set of admissible vectors; we will typically understand as the maximal subset of with these properties.
- The conic subbundle where the signature of g and the sign of L agree, will be interpreted as the set of future-pointing time-like vectors.
3. Spacetime Conditions for -Metrics
- 1.
- Using the above assumption and , it follows that:in particular, must be completely contained in the future-pointing cone of a.Indeed, according to the mentioned assumption, for any , there exists at least one vector y in the intersection which thus must satisfy . As both a A and Ψ are assumed to be smooth (and hence, continuous) on , in order to change sign, they should pass through 0. But the vanishing of either A or Ψ entails , which is in contradiction with the positiveness axiom for L inside ; therefore, (8) must hold throughout .
- 2.
- On the boundary L can be continuously prolonged as to satisfy:
- In the plane ; in this case, the corresponding critical value is .
- On the ray directed by emanating from the origin; this yields the critical value .
- Taking into account the above Lemma, we note that the corresponding critical values are—if attained inside —minimal values for s. This way, we find:
- 1.
- The lower bound is attained for in two situations:
- i.
- When is L-time-like (which implies that, in particular, it is also a-time-like, meaning that ) and is collinear to ;
- ii.
- When the critical hyperplane for s intersects (a necessary condition for this is that b is a-space-like).
- 2.
- For the upper bound, we have two possibilities:
- i.
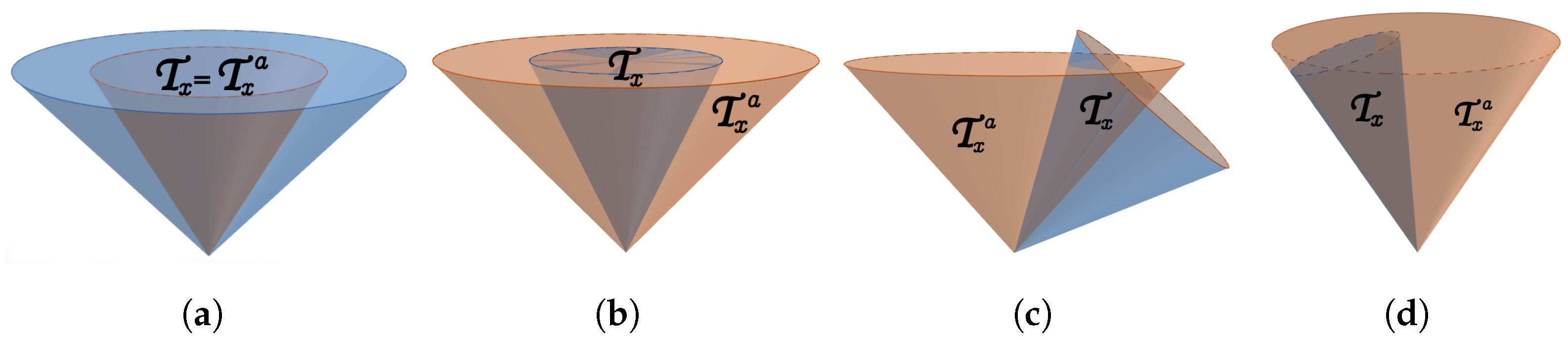
- If the boundary contains points where (as in Figure 1a,c,d), then, approaching these points, we will have therefore, in this case, where the upper bound is sharp.
- ii.
- If A does not vanish anywhere on (situation (b) in Figure 1, when consists only of points where ), then—since obviously we cannot have inside either—it follows that s has a finite supremum on , in other words, we can safely write for some finite value
- Step 1.
- There exists at least one on the boundary such that
- -
- We first note that ℓ has no common points with Indeed, for any we have
- -
- Second, is a non-empty, connected set. Indeed, ℓ contains an interior point of which is u. Moreover, since is convex, this means that its closure—which is also necessarily convex—must intersect ℓ by a segment, a half-line, or the whole ℓ. In any case, is connected.
- -
- Third, we show that the set intersects the cone To this aim, let us build the functionThis function always has at least one root, as follows. (i) If , i.e., , then, since u is a-time-like, it cannot be a-orthogonal to which means . Hence, in this case f is of first degree in and thus has one zero. (ii) If , i.e., then f is quadratic with a halved discriminant by virtue of the reverse Cauchy–Schwarz inequality for a. Hence, again, f has real roots.
- -
- Finally, taking into account the connectedness of , we find that, moving away from u along the line we stay in and, at some point, we must hit the boundary If, in a worst case scenario, we do not hit first a point where , then we must anyway reach a root of f, which will thus give a boundary point for Moreover, since at this point we always have
- Step 2.
- There exists a subset on which :
- Step 3.
- must have a constant sign on the entire I:
- (i)
- has signature and is negative definite on the -orthogonal complement of
- (ii)
- (i)
- on and
- (ii)
- For all values of s corresponding to vectors
- Assume now that there exists a conic subbundle with connected fibers and obeying conditions and Then, in order to prove that is a Finsler spacetime, it is sufficient to show that has signature for all , which, using Lemma 3, is the same as With this aim, we note that, using , this reduces to:
- 1.
- Since then any strictly positive and monotonically increasing function σ will obey our condition, as, in this case, we will have the stronger inequality:
- 2.
4. Examples
4.1. Lorentzian Metrics
4.2. Randers Metrics
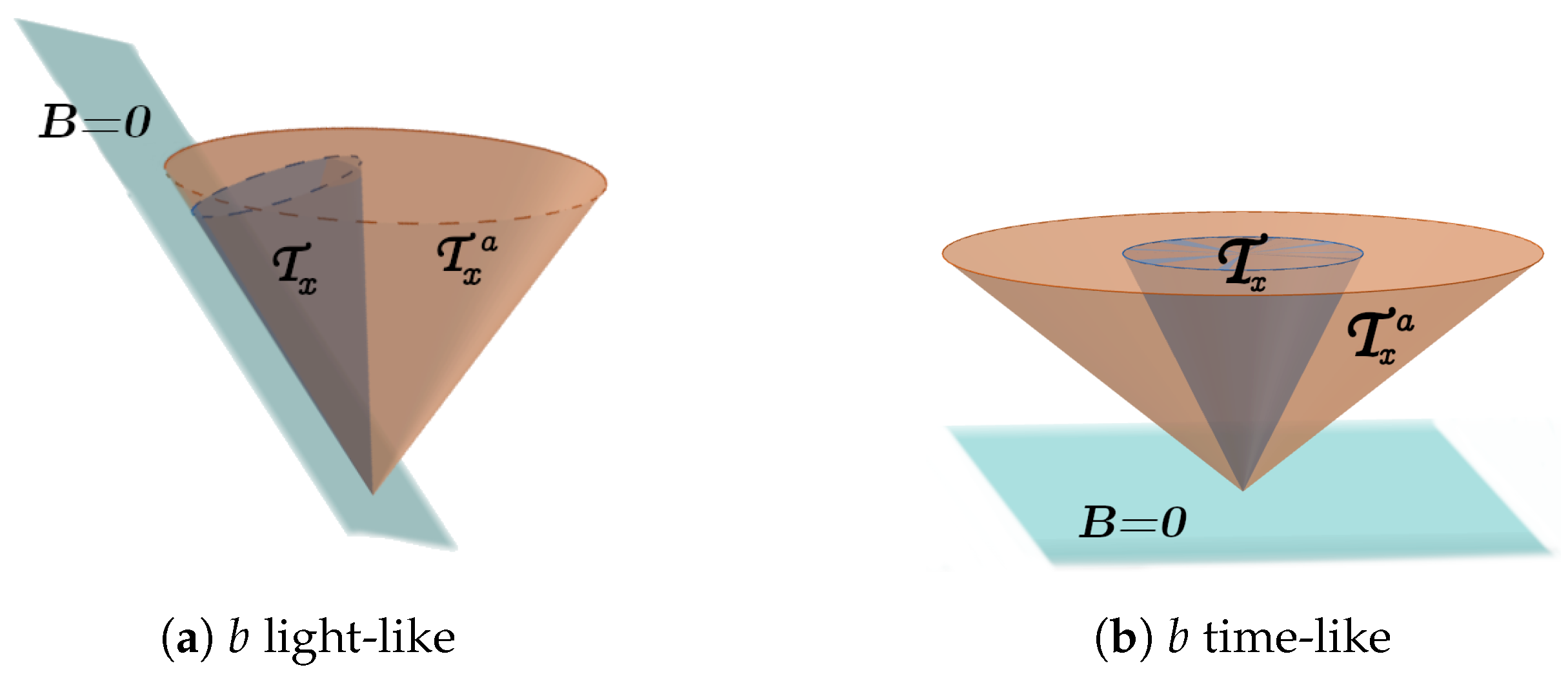
- On the boundary we must have , which implies:This leads to the even more interesting conclusion below.
- At any point of a Randers spacetime, the whole cone lies in the half-space :In particular, the hyperplane cannot intersect the interior of .To justify the above, let us first show that cannot occur inside . Indeed, if this were the case, then, fixing an arbitrary , the fact that is open in the topology of guarantees that there must be an entire Euclidean ball centered at u which remains in . However, since u is in the hyperplane , half of this ball will be contained in the hyperspace ; in other words, the intersection is non-empty. By its definition, is an open, conic, and convex set and, moreover, by continuity, on the boundary , we have . On the other hand, proceeding as in the first step of the proof of Lemma 2, we find that there must exist a point where . Such a point is, thus, a point of , where, in addition, , which is in contradiction with the above remark. Therefore, cannot happen in the interior of (but only possibly on its boundary). An immediate consequence of this is that B must have a constant nonzero sign on ; moreover, this sign is negative.
- Furthermore, according to Theorem 1, on its future-pointing time-like cones, we must have , which is equivalent to . Using Lemma 1, this gives
- To prove the first inequality , let us assume that this is not the case, i.e., . We will show that, in this case, the hyperplane must intersect . To this aim, fix an arbitrary point and an a-orthonormal basis , with being a-time-like and being collinear to . It follows that for some . Accordingly, becomes equivalent to and the hyperplane is described by the equation . Taking into account (18), it follows that the intersection between this hyperplane and is the region of the three-dimensional cone:lying in (that is, with ), which is by far non-empty. This is in contradiction with the fact that the hyperplane cannot intersect , as shown above. We conclude that our assumption was false, that is, .
- The functions A and are, by definition, positive inside and, when approaching the boundary of (that is, for ), we find that and hence, . The smoothness of follows as the value (which would correspond to ) cannot appear inside . This happens since b is, by hypothesis, non-space-like with respect to a; that is, cannot occur within and accordingly cannot occur in .
- The conditions in (ii) of Theorem 1 follow immediately using (21).
- Thus, defines a Finsler spacetime structure. □
- 1.
- The result above extends those in [42] by taking into consideration the case when b is a-space-like and actually proving that this never defines a Randers spacetime.
- 2.
- A very recent article1, [21], proposed a modification of the standard Randers metric. With our above notations and signature convention , on the set of interest , this reads:This is a very interesting extension, as it removes the request that B should be strictly negative inside . Thus, for modified Randers metrics (24), the restriction (which was motivated precisely by the fact that once crossing the hyperplane , B changes sign) is no longer necessary. Moreover, on regions where and (in which the cones must be contained), we have just as above (with the only difference that, in the definition of s, we no longer have ). Thus, a completely similar reasoning shows that (24) leads to a well-defined spacetime structure if and only if . This is consistent with the result in [21].
4.3. Bogoslovsky–Kropina Metrics
- (i)
- and In this case, the future-pointing cones of L coincide with those of A.
- (ii)
- and In this case, the future-pointing cones of L coincide with those of A.
- (iii)
- and . In this case, the future-pointing cones of L are obtained by intersecting the future-pointing cones of A with the half-space .
- Assume that L defines a spacetime structure and let us first identify the future-pointing cones of L, together with the domain of the definition of .
- 1.
- If b is non-space-like with respect to a, then cannot happen inside (it can, in the worst case, when b is a-light-like, happen on its boundary). In this case, we thus have ; moreover, the reverse Cauchy–Schwarz inequality tells us that , with equality for . In other words, the minimum value is always attained on the closure of .
- 2.
- If b is a-space-like, then points with will always exist inside . We note that, in order to have a finite limit for as we approach the hyperplane , we must necessarily have:In this case, the cone will be the region of the cone situated in the half-space and s will tend to zero as we approach the boundary points with .
- 3.
- On the other hand, as shown above, the boundary of each cone of any -metric spacetime must contain at least one point where . In our case, this means that there will always be at least one boundary point satisfying , i.e., we necessarily have in , values .
- Briefly: in any case, is defined on the entire interval:
- Having identified the function , we are now ready to rewrite, in our case, the conditions in Theorem 1.
- Since, inside the above-identified cones , we obviously have and , where is smooth, in order to check these conditions, we must impose that when approaching any point of the boundary , we should have . This immediately implies:
- The first inequality becomes , i.e., it is equivalent to the same inequality .
- Noting that the second inequality (16) reads , which, taking into account that , is equivalent to
- If , then at the lower bound , the (non-strict) inequality (29) is identically satisfied. Imposing it for , we find:which proves the necessity of condition (i) in our statement.
- If then for , the (non-strict) inequality (29) is identically satisfied. Imposing it for , we find:Yet, we note that cannot actually happen, as it would lead to equality in (29) for all s, which proves the necessity of condition (ii) in our statement.
- If , then for , we find , whereas the lower bound gives , proving the necessity of condition (iii).
- ←: Assuming one of the situations (i)–(iii) happens, then the conditions in Theorem 1 are immediately satisfied on the said cones by . Hence, L defines a spacetime structure. □
4.4. Generalized m-Kropina (VGR) Metrics
- (i)
- .In this case, the future-pointing time-like cones of L are the connected components of the cones contained in the future-pointing time-like cones .
- (ii)
- .In this case, the future-pointing time-like cones of L are regions of the the cones lying both in the future-pointing time-like cones and in the half-space .
- 1.
- Assume . Then, cannot happen inside the future-pointing time-like cones of a, and hence cannot occur in the Finslerian ones . Thus, in this case, each of the cones is the connected component of the convex cone:contained in . In this case, a quick check shows that:which means that one of the vectors or belongs to . In either case, we find that the corresponding value is attained on the closure of and it represents the lower bound for .At this lower bound, inequality (36) reduces to:and is identically satisfied for any value of .
- 2.
- Suppose . Then, the hyperplane has common points with the cone . However, points with are either singular points for L (if ), or null cone points if . Obviously, the only viable situation is the second one, namely:Knowing this, evaluation of (36) at the lower bound of the interval for s, which is in this case , gives:which always happens, as .The future-pointing time-like cones of L are then the intersections of the cone with the future-pointing cones and the half-space .
- Assuming and , then the matrix has a Lorentzian signature , meaning that the set is a convex cone, which is, moreover, contained in the cone . Then, assuming one of the situations (i) or (ii) holds, one can immediately check the conditions of Theorem (1) for the specified (note that statement (ii) in the theorem is equivalent to (34) and (36)). □
4.5. Exponential Metrics
- If this is the case, then the future-pointing time-like cones of L coincide with those of the Lorentzian metric A.
5. Isometries of -Metric Spacetimes
- 1.
- In this case, only. Integration of this equation gives:which means that is actually pseudo-Riemannian.
- 2.
- We note that, on the right hand side, on the one hand, we must have (otherwise we only get trivial symmetries ) and, on the other hand, the numerator and the denominator must be given by relatively prime polynomials; in the contrary case, A would admit B as a factor, which is not possible, since its -Hessian is nondegenerate. However, then B must divide , that is,where, given that we must have only. Accordingly,The functions corresponding to such symmetries are then obtained from (49), which in our case readsand can be directly integrated to give
- 3.
- This gives and, equivalently,This implies that B must divide , since is of degree two and hence it cannot “swallow” more than a factor of of the from the left hand side. This in turn implies that B divides thus leading to a degenerate -Hessian for A, which is impossible.
- 4.
- In this case, we have:The ratio on the right hand side is either irreducible or a function of x only. This is derived as follows. Assuming that it can be simplified by a first degree factor, then both and must be decomposable; in particular, they must have degenerate -Hessians, i.e.,Using Lemma A1 (see Appendix A), that is leads toThe latter actually means that the ratio depends on x only (i.e., it is actually simplified by a second degree factor, not a first degree one, as assumed).Thus, we only have two possibilities:
- (a)
- , that is, , which, by a similar reasoning to Case 1, entails that L is actually pseudo-Riemannian.
- (b)
- is irreducible. In this case, from (53), we find that B must either divide (but, then, would equal a ratio of first degree polynomials, which contradicts the irreducibility assumption) or it must divide , which, taking into account that A and B are always relatively prime, leads to in contradiction with the hypothesisTherefore, there are no properly Finslerian functions L with
6. Conclusions
- 1.
- 2.
- To calculate and understand the precise physical interpretation of the various non-Riemannian notions such as Berwald or Landsberg curvature (see, e.g., [47]), with a special focus on spacetimes with -metrics. We conjecture that these non-Riemannian quantities could account for at least a part of the observed dark energy phenomenology.
- 3.
- In light of the above, it will be important to construct some non-trivial Ricci flat Finsler -metric spacetimes with some nonzero non-Riemannian quantities. Some interesting Ricci flat Finsler spacetimes have been constructed, although they are not in an -form, see, e.g., [48].
- 4.
- To construct the most general spatially spherically symmetric and the most general cosmologically symmetric spacetimes of -metric type, whose underlying Lorentzian metrics do not possess such symmetries.
- 5.
- To completely classify -metrics which lead to well-defined Finsler spacetimes, for which the underlying pseudo-Riemannian metric a has a non-Lorentzian signature.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Calculation of
- 1.
- for all -vectors , where the indices of have been raised by means of the inverse
- 2.
- If the inverse of the matrix exists and has the entries:
- To calculate the blocks appearing in (A4), we use , which yields: (where ) and finally:
- On subsets where , we can apply the corollary, which gives, after a brief computation:The square bracket can be rewritten as:which gives the desired result (A1).
- The result can then be prolonged by continuity also at points where . To see this, we note that this equality cannot happen on any entire interval , as this would entail that, for ,That is, where only. However, on the (open) subset , we would then have which has degenerate Hessian and hence does not represent a pseudo-Finsler function.
| 1 | This article appeared during the production process of the present paper. |
| 2 |
References
- Pfeifer, C. Finsler spacetime geometry in Physics. Int. J. Geom. Meth. Mod. Phys. 2019, 16, 1941004. [Google Scholar] [CrossRef]
- Saridakis, E.N.; Lazkoz, R.; Salzano, V.; Moniz, P.V.; Capozziello, S.; Jiménez, J.B.; De Laurentis, M.; Olmo, G.J. Modified Gravity and Cosmology: An Update by the CANTATA Network; Springer: Cham, Switzerland, 2021. [Google Scholar]
- Hohmann, M.; Pfeifer, C.; Voicu, N. Relativistic kinetic gases as direct sources of gravity. Phys. Rev. 2020, D101, 024062. [Google Scholar] [CrossRef]
- Addazi, A.; Alvarez-Muniz, J.; Batista, R.A.; Amelino-Camelia, G.; Antonelli, V.; Arzano, M.; Asorey, M.; Atteia, J.-L.; Bahamonde, S.; Bajardi, F.; et al. Quantum gravity phenomenology at the dawn of the multi-messenger era—A review. Prog. Part. Nucl. Phys. 2022, 125, 103948. [Google Scholar] [CrossRef]
- Lobo, I.P.; Pfeifer, C. Reaching the Planck scale with muon lifetime measurements. Phys. Rev. D 2021, 103, 106025. [Google Scholar] [CrossRef]
- Amelino-Camelia, G.; Barcaroli, L.; Gubitosi, G.; Liberati, S.; Loret, N. Realization of doubly special relativistic symmetries in Finsler geometries. Phys. Rev. D 2014, 90, 125030. [Google Scholar] [CrossRef]
- Kostelecký, A. Riemann-Finsler geometry and Lorentz-violating kinematics. Phys. Lett. B 2011, 701, 137–143. [Google Scholar] [CrossRef]
- Shreck, M. Classical Lagrangians and Finsler structures for the nonminimal fermion sector of the Standard-Model Extension. Phys. Rev. 2016, D93, 105017. [Google Scholar] [CrossRef]
- Kostelecký, V.A.; Russell, N.; Tso, R. Bipartite Riemann–Finsler geometry and Lorentz violation. Phys. Lett. 2012, B716, 470–474. [Google Scholar] [CrossRef]
- Gibbons, G.; Gomis, J.; Pope, C. General very special relativity is Finsler geometry. Phys. Rev. D 2007, 76, 081701. [Google Scholar] [CrossRef]
- Cohen, A.G.; Glashow, S.L. Very special relativity. Phys. Rev. Lett. 2006, 97, 021601. [Google Scholar] [CrossRef]
- Fuster, A.; Pabst, C. Finsler pp-waves. Phys. Rev. 2016, D94, 104072. [Google Scholar] [CrossRef]
- Fuster, A.; Pabst, C.; Pfeifer, C. Berwald spacetimes and very special relativity. Phys. Rev. 2018, D98, 084062. [Google Scholar] [CrossRef]
- Elbistan, M.; Zhang, P.M.; Dimakis, N.; Gibbons, G.W.; Horvathy, P.A. Geodesic motion in Bogoslovsky-Finsler spacetimes. Phys. Rev. D 2020, 102, 024014. [Google Scholar] [CrossRef]
- Bouali, A.; Chaudhary, H.; Hama, R.; Harko, T.; Sabau, S.V.; Martín, M.S. Cosmological tests of the osculating Barthel–Kropina dark energy model. Eur. Phys. J. C 2023, 83, 121. [Google Scholar] [CrossRef]
- Gibbons, G.W.; Herdeiro, C.A.R.; Warnick, C.M.; Werner, M.C. Stationary Metrics and Optical Zermelo-Randers-Finsler Geometry. Phys. Rev. D 2009, 79, 044022. [Google Scholar] [CrossRef]
- Werner, M.C. Gravitational lensing in the Kerr-Randers optical geometry. Gen. Rel. Grav. 2012, 44, 3047–3057. [Google Scholar] [CrossRef]
- Caponio, E.; Javaloyes, M.Á.; Masiello, A. On the energy functional on Finsler manifolds and applications to stationary spacetimes. Math. Ann. 2011, 351, 365–392. [Google Scholar] [CrossRef]
- Caponio, E.; Javaloyes, M.A.; Caja, M.S. On the interplay between Lorentzian Causality and Finsler metrics of Randers type. Rev. Mat. Iberoam. 2011, 27, 919–952. [Google Scholar] [CrossRef]
- Heefer, S.; Pfeifer, C.; Fuster, A. Randers pp-waves. Phys. Rev. D 2021, 104, 024007. [Google Scholar] [CrossRef]
- Heefer, S.; Fuster, A. Finsler gravitational waves of (α,β)-type and their observational signature. arXiv 2023, arXiv:2302.08334. [Google Scholar]
- Silva, J.E.G. A field theory in Randers-Finsler spacetime. EPL 2021, 133, 21002. [Google Scholar] [CrossRef]
- Kapsabelis, E.; Triantafyllopoulos, A.; Basilakos, S.; Stavrinos, P.C. Applications of the Schwarzschild—Finsler—Randers model. Eur. Phys. J. C 2021, 81, 990. [Google Scholar] [CrossRef]
- Caponio, E.; Javaloyes, M.A.; Sánchez, M. Wind Finslerian structures: From Zermelo’s navigation to the causality of spacetimes. arXiv 2014, arXiv:1407.5494. [Google Scholar]
- Bacso, S.; Cheng, S.; Shen, Z. Curvature properties of (α,β)-metrics. Adv. Stud. Pure Math. 2005, 48, 73–110. [Google Scholar]
- Sabau, S.; Shimada, H. Classes of Finsler spaces with (α,β)-metrics. Rep. Math. Phys. 2001, 47, 31–48. [Google Scholar] [CrossRef]
- Matsumoto, M. Theory of Finsler spaces with (α,β)-metric. Rep. Math. Phys. 1992, 31, 43–83. [Google Scholar] [CrossRef]
- Li, X.; Chang, Z.; Mo, X. Symmetries in a very special relativity and isometric group of Finsler space. Chin. Phys. C 2011, 35, 535. [Google Scholar] [CrossRef]
- Elgendi, S.G.; Kozma, L. (α,β)-Metrics Satisfying the T-Condition or the σT-Condition. J. Geom. Anal. 2020, 31, 7866–7884. [Google Scholar] [CrossRef]
- Crampin, M. Isometries and Geodesic Invariants of Finsler Spaces of (α,β) Type. Preprint on Research Gate. 2022. Available online: https://www.researchgate.net/publication/360335742_Isometries_and_geodesic_invariants_of_Finsler_spaces_of_a_b_type (accessed on 12 April 2023). [CrossRef]
- Javaloyes, M.A.; Pendás-Recondo, E.; Sánchez, M. An account on links between Finsler and Lorentz Geometries for Riemannian Geometers. arXiv 2022, arXiv:2203.13391. [Google Scholar]
- Pfeifer, C.; Wohlfarth, M. Causal structure and electrodynamics on Finsler spacetimes. Phys. Rev. 2011, D84, 044039. [Google Scholar] [CrossRef]
- Lammerzahl, C.; Perlick, V.; Hasse, W. Observable effects in a class of spherically symmetric static Finsler spacetimes. Phys. Rev. 2012, D86, 104042. [Google Scholar] [CrossRef]
- Javaloyes, M.A.; Sánchez, M. On the definition and examples of cones and Finsler spacetimes. RACSAM 2020, 114, 30. [Google Scholar] [CrossRef]
- Hasse, W.; Perlick, V. Redshift in Finsler spacetimes. Phys. Rev. 2019, D100, 024033. [Google Scholar] [CrossRef]
- Bernal, A.; Javaloyes, M.A.; Sánchez, M. Foundations of Finsler Spacetimes from the Observers’ Viewpoint. Universe 2020, 6, 55. [Google Scholar] [CrossRef]
- Caponio, E.; Masiello, A. On the analyticity of static solutions of a field equation in Finsler gravity. Universe 2020, 6, 59. [Google Scholar] [CrossRef]
- Caponio, E.; Stancarone, G. Standard static Finsler spacetimes. Int. J. Geom. Meth. Mod. Phys. 2016, 13, 1650040. [Google Scholar] [CrossRef]
- Hohmann, M.; Pfeifer, C.; Voicu, N. Mathematical foundations for field theories on Finsler spacetimes. J. Math. Phys. 2022, 63, 032503. [Google Scholar] [CrossRef]
- Beem, J.K. Indefinite Finsler spaces and timelike spaces. Can. J. Math. 1970, 22, 1035. [Google Scholar] [CrossRef]
- Asanov, G.S. Finsler Geometry, Relativity and Gauge Theories; D. Reidel Publishing Company: Dordrecht, The Netherlands, 1985. [Google Scholar]
- Hohmann, M.; Pfeifer, C.; Voicu, N. Finsler gravity action from variational completion. Phys. Rev. 2019, D100, 064035. [Google Scholar] [CrossRef]
- Bogoslovsky, G. A special-relativistic theory of the locally anisotropic space-time. Il Nuovo C. B Ser. 11 1977, 40, 99. [Google Scholar] [CrossRef]
- Bejancu, A.; Farran, H. Geometry of Pseudo-Finsler Submanifolds; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Bao, D.; Chern, S.S.; Shen, Z. An Introduction to Finsler-Riemann Geometry; Springer: New York, NY, USA, 2000. [Google Scholar]
- Li, X.; Chang, Z.; Mo, X. Isometric group of (α,β)-type Finsler space and the symmetry of Very Special Relativity. arXiv 2010, arXiv:1001.2667. [Google Scholar]
- Shen, Z. Differential Geometry of Spray and Finsler Spaces; Springer: Dordrecht, The Netherlands, 2001. [Google Scholar]
- Marcal, P.; Shen, Z. Ricci flat Finsler metrics by warped product. Proc. Am. Math. Soc. 2023, 151, 2169–2183. [Google Scholar]
- Chern, S.S.; Shen, Z. Riemann-Finsler Geometry; Nankai Tracts in Mathematics: Volume 6; World Scientific: Singapore, 2005. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Voicu, N.; Friedl-Szász, A.; Popovici-Popescu, E.; Pfeifer, C. The Finsler Spacetime Condition for (α,β)-Metrics and Their Isometries. Universe 2023, 9, 198. https://doi.org/10.3390/universe9040198
Voicu N, Friedl-Szász A, Popovici-Popescu E, Pfeifer C. The Finsler Spacetime Condition for (α,β)-Metrics and Their Isometries. Universe. 2023; 9(4):198. https://doi.org/10.3390/universe9040198
Chicago/Turabian StyleVoicu, Nicoleta, Annamária Friedl-Szász, Elena Popovici-Popescu, and Christian Pfeifer. 2023. "The Finsler Spacetime Condition for (α,β)-Metrics and Their Isometries" Universe 9, no. 4: 198. https://doi.org/10.3390/universe9040198
APA StyleVoicu, N., Friedl-Szász, A., Popovici-Popescu, E., & Pfeifer, C. (2023). The Finsler Spacetime Condition for (α,β)-Metrics and Their Isometries. Universe, 9(4), 198. https://doi.org/10.3390/universe9040198