
Hunting for Gravitational Quantum Spikes


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Classical Level
2.1. Phase Space
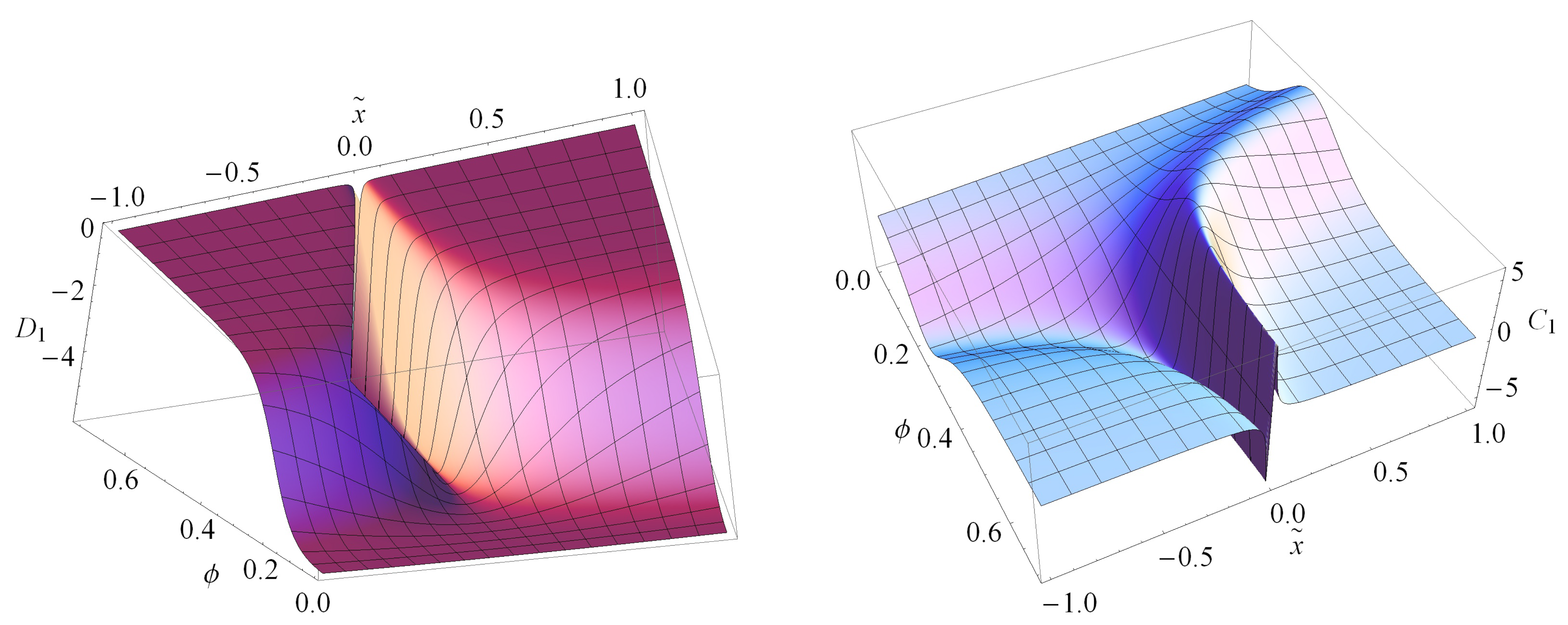
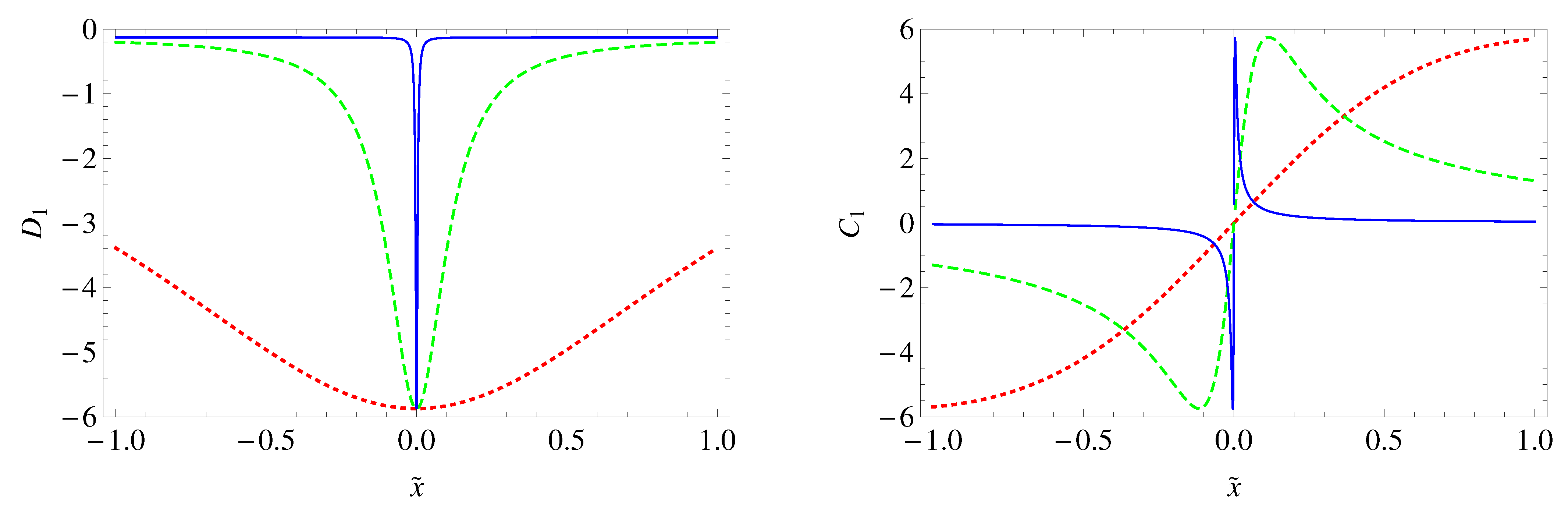
2.2. Classical Spikes
2.2.1. Parametrization of Dynamics by a Scalar Field
2.2.2. Parametrization of Dynamics by the Arc Length
3. Quantum Level
3.1. Representation of the Affine Group
3.2. Quantum Dynamics
- First of all, the operator evolves the quantum state of our gravitational system from the “time” and the state to the “time” and the state as followswhere , and where is a Hilbert space. Thus changes the state vector in the Hilbert state space and the time parameter by changing the field.Since the time parameter does not couple to the gravitational field in (7), we can factorize the evolution operator into two independent operations:(a) the unitary operator acting on the spatial dependence of state vectors in the Hilbert space while the field is changing,(b) the operation acting on the parametric dependence of the state vectors of the field .In what follows, we assume the dependence of the evolution operator on the difference between the final and initial value of the field , i.e., we assume the translational invariance of the evolution operator with respect to the parameter . This means that does not depend on the choice of the initial time , but only on . Thus, the full evolution operator can be written as
- The evolution operator fulfils the standard conditions for quantum evolution:The first one represents the fact, that if there is no shift in time, the state vector stays the same. The second means that every evolution can be split into intermediate steps. These two conditions are expected to hold for both the classical end quantum evolution. The last line represents the unitarity condition which is related to the probabilistic interpretation of quantum mechanics.To fulfil the last condition the parametric part of the evolution operator has to transform as the complex conjugation:Let us now consider a formal shift operation with respect to the field . For this purpose, we define a kind of adjoint action of the field and its canonically conjugate momentum on the classical phase space. For an arbitrary function on this phase space the adjoint action is defined to bewhere the Poisson bracket is given by
3.2.1. Solving the Eigenequation (68) Analytically
3.2.2. Solving the Eigenequation (69) by Variational Method
3.2.3. Solving the Eigenequation (69) by Spectral Method
3.3. Imposition of the Dynamical Constraint
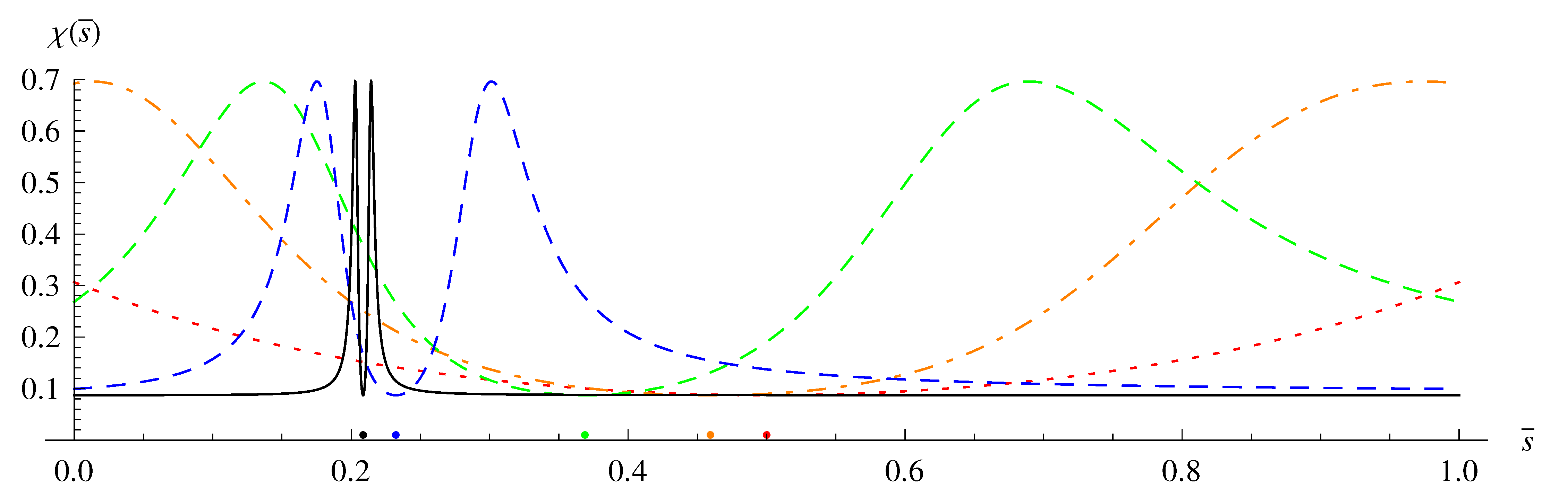
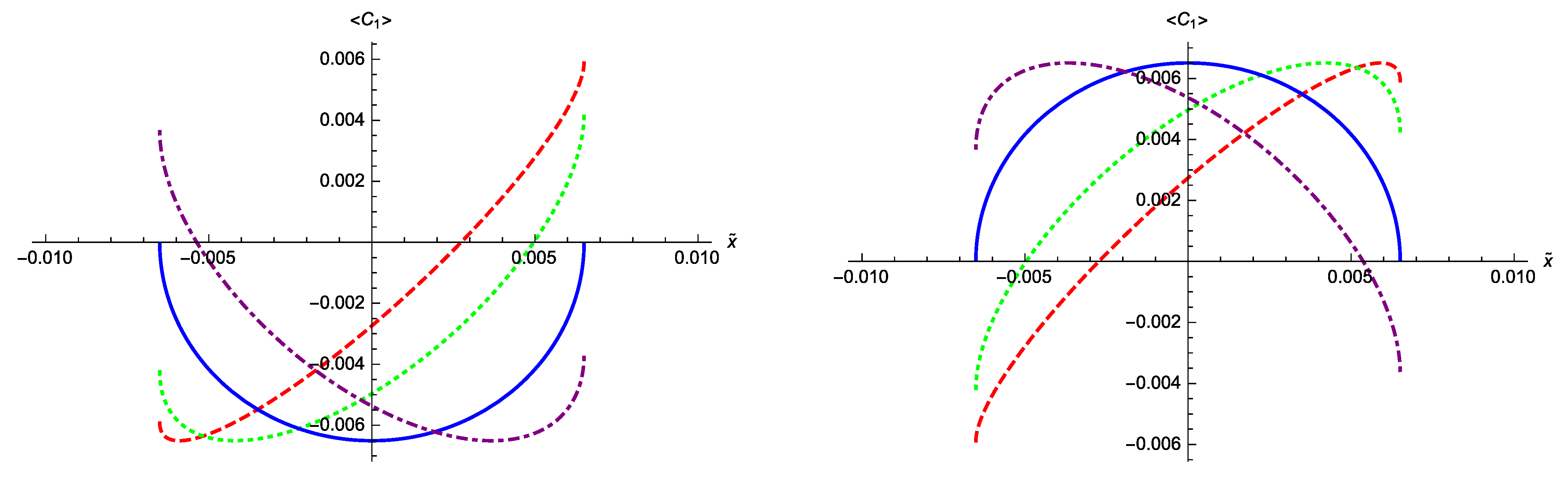
4. Quantum Spikes
4.1. Using the Results of the Variational Method
4.2. Using the Results of the Spectral Method
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Numerical Solutions
References
- Belinskii, V.A.; Khalatnikov, I.M.; Lifshitz, E.M. Oscillatory approach to a singular point in the relativistic cosmology. Adv. Phys. 1970, 19, 525–573. [Google Scholar] [CrossRef]
- Belinskii, V.A.; Khalatnikov, I.M.; Lifshitz, E.M. A general solution of the Einstein equations with a time singularity. Adv. Phys. 1982, 31, 639–667. [Google Scholar] [CrossRef]
- Belinski, V.; Henneaux, M. The Cosmological Singularity; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Góźdź, A.; Piechocki, W.; Plewa, G. Quantum Belinski–Khalatnikov–Lifshitz scenario. Eur. Phys. J. C 2019, 79, 45. [Google Scholar] [CrossRef]
- Góźdź, A.; Piechocki, W. Robustness of the quantum BKL scenario. Eur. Phys. J. C 2020, 80, 142. [Google Scholar] [CrossRef]
- Ashtekar, A.; Henderson, A.; Sloan, D. Hamiltonian formulation of the Belinskii-Khalatnikov-Lifshitz conjecture. Phys. Rev. D 2011, 83, 084024. [Google Scholar] [CrossRef]
- Lim, W.C. New explicit spike solutions - non-local component of the generalized Mixmaster attractor. Class. Quant. Grav. 2008, 25, 045014. [Google Scholar] [CrossRef]
- Lim, W.C.; Andersson, L.; Garfinkle, D.; Pretorius, F. Spikes in the Mixmaster regime of G2 cosmologies. Phys. Rev. D 2009, 79, 123526. [Google Scholar] [CrossRef]
- Coley, A.A.; Lim, W.C. Generating Matter Inhomogeneities in General Relativity. Phys. Rev. Lett. 2012, 108, 191101. [Google Scholar] [CrossRef]
- Heinzle, J.M.; Uggla, C.; Lim, W.C. Spike oscillations. Phys. Rev. D 2012, 86, 104049. [Google Scholar] [CrossRef]
- Coley, A.A.; Lim, W.C. General relativistic density perturbations. Class. Quant. Grav. 2014, 31, 015020. [Google Scholar]
- Coley, A.A.; Lim, W.C. Demonstration of the spike phenomenon using the LTB models. Class. Quant. Grav. 2014, 31, 115012. [Google Scholar] [CrossRef][Green Version]
- Lim, W.C. Non-orthogonally transitive G2 spike solution. Class. Quant. Grav. 2015, 32, 162001. [Google Scholar] [CrossRef]
- Coley, A.A.; Gregoris, D.; Lim, W.C. On the first G1 stiff fluid spike solution in General Relativity. Class. Quant. Grav. 2016, 33, 215010. [Google Scholar] [CrossRef]
- Coley, A.A. Mathematical general relativity. Gen. Rel. Grav. 2019, 51, 78. [Google Scholar] [CrossRef]
- Czuchry, E.; Garfinkle, D.; Klauder, J.R.; Piechocki, W. Do spikes persist in a quantum treatment of spacetime singularities? Phys. Rev. D 2017, 95, 024014. [Google Scholar] [CrossRef]
- Hillen, T. A Classification of Spikes and Plateaus. SIAM Rev. 2007, 49, 35–51. [Google Scholar] [CrossRef]
- Gutkin, B.; Ermentrout, G.B.; Rudolph, M. Spike generating dynamics and the conditions for spike-time precision in cortical neurons. J. Comput. Neurosci. 2003, 15, 91–103. [Google Scholar] [CrossRef]
- Tilloy, A.; Bauer, M.; Bernard, D. Spikes in quantum trajectories. Phys. Rev. A 2015, 92, 052111. [Google Scholar] [CrossRef]
- Perko, L. Differential Equations and Dynamical Systems; Springer: New York, NY, USA, 2006. [Google Scholar]
- Wiggins, S. Introduction to Applied Nonlinear Dynamical Systems and Chaos; Springer: New York, NY, USA, 2003. [Google Scholar]
- Kühnel, W. Differential Geometry: Curves - Surfaces - Manifolds; American Mathematical Society: Providence, RI, USA, 2006. [Google Scholar]
- Aslaksen, E.W.; Klauder, J.R. Unitary Representations of the Affine Group. J. Math. Phys. 1968, 9, 206–211. [Google Scholar] [CrossRef]
- Grandclément, P.; Novak, J. Spectral Methods for Numerical Relativity. Living Rev. Rel. 2009, 12, 1. [Google Scholar] [CrossRef]
- Chong, D.P.; Rasiel, Y. Constrained-Variation Method in Molecular Quantum Mechanics. Comparison of Different Approaches. J. Chem. Phys. 1966, 44, 1819. [Google Scholar] [CrossRef][Green Version]
- Smilga, A.V. Lectures on Quantum Chromodynamics; World Scientific: Singapore, 2001. [Google Scholar]
- Mang, H.J.; Samadi, B.; Ring, P. On the Solution of Constrained Hartree-Fock-Bogolyubov Equations. Z. Physik A 1976, 279, 325–329. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Góźdź, A.; Piechocki, W.; Plewa, G.; Trześniewski, T. Hunting for Gravitational Quantum Spikes. Universe 2021, 7, 49. https://doi.org/10.3390/universe7030049
Góźdź A, Piechocki W, Plewa G, Trześniewski T. Hunting for Gravitational Quantum Spikes. Universe. 2021; 7(3):49. https://doi.org/10.3390/universe7030049
Chicago/Turabian StyleGóźdź, Andrzej, Włodzimierz Piechocki, Grzegorz Plewa, and Tomasz Trześniewski. 2021. "Hunting for Gravitational Quantum Spikes" Universe 7, no. 3: 49. https://doi.org/10.3390/universe7030049
APA StyleGóźdź, A., Piechocki, W., Plewa, G., & Trześniewski, T. (2021). Hunting for Gravitational Quantum Spikes. Universe, 7(3), 49. https://doi.org/10.3390/universe7030049