
Time-Delay Interferometry: The Key Technique in Data Pre-Processing Analysis of Space-Based Gravitational Waves

Abstract
1. Introduction
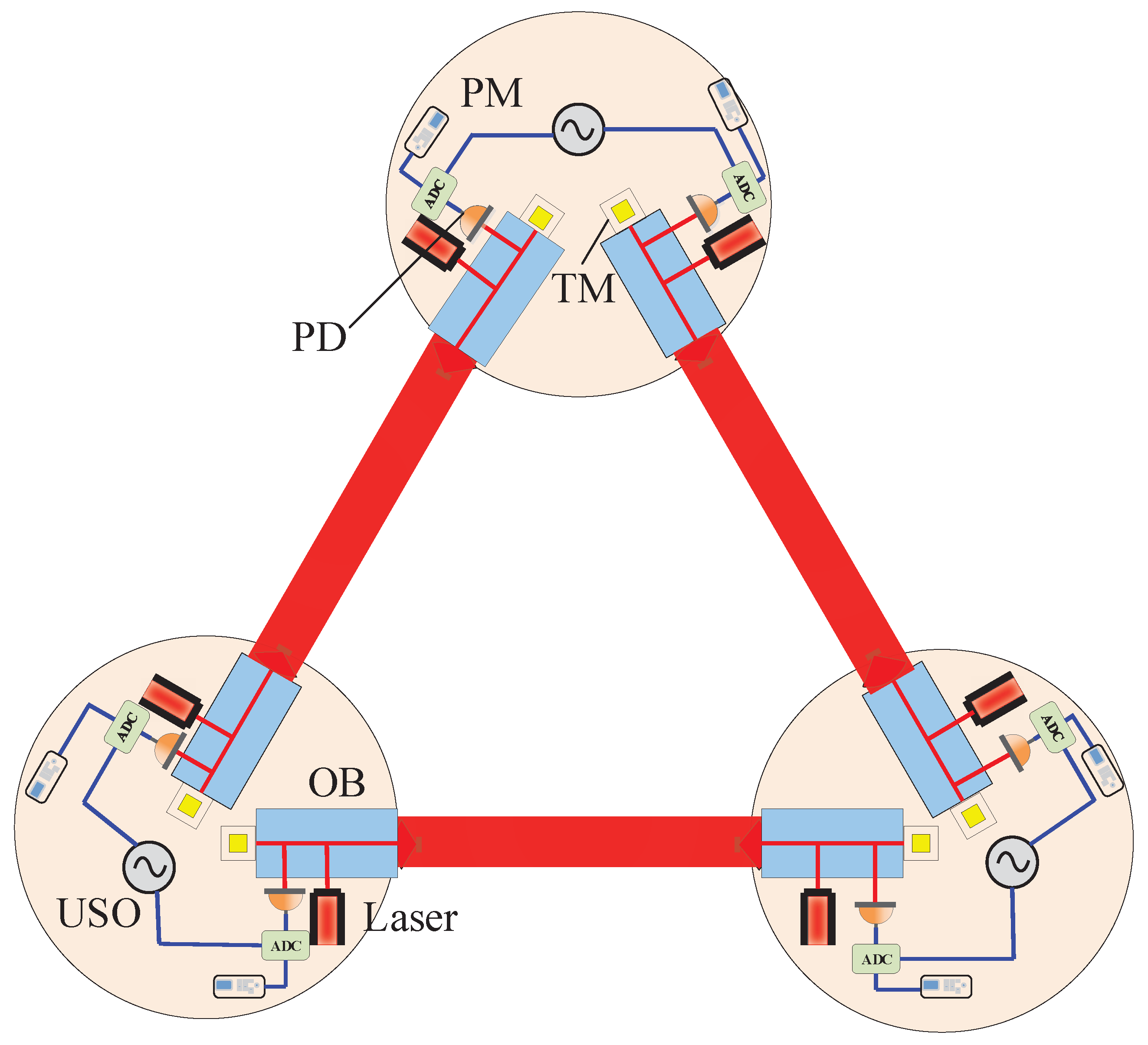
2. Conventions and Laser Interferometry Measurement Data
- (a)
- The incident laser from a distant spacecraft interferes with the local laser, with the incident laser carrying gravitational wave information. The signal obtained from this type of interference measurement is known as the scientific carrier interferometric data stream, denoted by .
- (b)
- The laser exchange between two adjacent MOSAs on the same spacecraft, where the laser from MOSA is transmitted through an optical fiber to the test mass of MOSA i and reflected to interfere with the local laser, resulting in the test mass interferometric data stream, is denoted by .
- (c)
- The laser from the adjacent MOSA is transmitted through an optical fiber to MOSA i and beat with the local laser beam, yielding the reference interferometric data stream .
- (d)
- To eliminate clock noise, an electro-optic modulator is used to generate sidebands at both ends of the carrier. The driving frequency of the electro-optic modulator is referenced to the clock, transferring clock noise to the distant spacecraft. The sidebands are beat with each other to produce the sideband data stream .
3. Time Delay Interferometry Technique for Reducing Laser Phase Noise
3.1. The Basic Principles of TDI
3.2. Methods for Obtaining TDI Combinations
3.2.1. Algebraic Method
3.2.2. Geometric Method
4. Arm Locking in Conjunction with Time-Delay Interferometry
4.1. The Principle of Arm Locking
4.2. Transformation Definition
4.3. Arm Locking in Conjunction with TDI
5. Sensitivity Function
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abbott, B. et al. [LIGO Scientific Collaboration and Virgo Collaboration] Observation of Gravitational Waves from a Binary Black Hole Merger. Phys. Rev. Lett. 2016, 116, 061102. [Google Scholar] [CrossRef] [PubMed]
- Abbott, B.P. et al. [LIGO Scientific Collaboration and Virgo Collaboration] GW151226: Observation of Gravitational Waves from a 22-Solar-Mass Binary Black Hole Coalescence. Phys. Rev. Lett. 2016, 116, 241103. [Google Scholar] [CrossRef] [PubMed]
- Abbott, B.P. et al. [LIGO Scientific and Virgo Collaboration] GW170104: Observation of a 50-Solar-Mass Binary Black Hole Coalescence at Redshift 0.2. Phys. Rev. Lett. 2017, 118, 221101, Erratum in Phys. Rev. Lett. 2018, 121, 129901. [Google Scholar] [CrossRef]
- Abbott, B. et al. [LIGO Scientific Collaboration and Virgo Collaboration] GW170817: Observation of Gravitational Waves from a Binary Neutron Star Inspiral. Phys. Rev. Lett. 2017, 119, 161101. [Google Scholar] [CrossRef] [PubMed]
- Abbott, B. et al. [LIGO Scientific Collaboration and Virgo Collaboration] GW170814: A Three-Detector Observation of Gravitational Waves from a Binary Black Hole Coalescence. Phys. Rev. Lett. 2017, 119, 141101. [Google Scholar] [CrossRef] [PubMed]
- Abbott, B.P.; Abbott, R.; Abbott, T.D.; Acernese, F.; Ackley, K.; Adams, C.; Adams, T.; Addesso, P.; Adhikari, R.X.; Adya, V.B.; et al. Search for Post-merger Gravitational Waves from the Remnant of the Binary Neutron Star Merger GW170817. Astrophys. J. Lett. 2017, 851, L16. [Google Scholar] [CrossRef]
- Abbott, B. et al. [LIGO Scientific Collaboration and Virgo Collaboration] GWTC-1: A Gravitational-Wave Transient Catalog of Compact Binary Mergers Observed by LIGO and Virgo during the First and Second Observing Runs. Phys. Rev. X 2019, 9, 031040. [Google Scholar] [CrossRef]
- Abbott, B.P. et al. [LIGO Scientific Collaboration and Virgo Collaboration] Tests of General Relativity with GW170817. Phys. Rev. Lett. 2019, 123, 011102. [Google Scholar] [CrossRef]
- Amaro-Seoane, P.; Audley, H.; Babak, S.; Baker, J.; Barausse, E.; Bender, P.; Berti, E.; Binetruy, P.; Born, M.; Bortoluzzi, D.; et al. Laser Interferometer Space Antenna. arXiv 2017, arXiv:1702.00786. [Google Scholar]
- Danzmann, K. LISA: An ESA cornerstone mission for a gravitational wave observatory. Class. Quantum Gravity 1997, 14, 1399–1404. [Google Scholar] [CrossRef]
- Luo, J.; Chen, L.-S.; Duan, H.-Z.; Gong, Y.-G.; Hu, S.; Ji, J.; Liu, Q.; Mei, J.; Milyukov, V.; Sazhin, M.; et al. TianQin: A space-borne gravitational wave detector. Class. Quantum Gravity 2016, 33, 035010. [Google Scholar] [CrossRef]
- Hu, W.R.; Wu, Y.L. The Taiji Program in Space for gravitational wave physics and the nature of gravity. Natl. Sci. Rev. 2017, 4, 685–686. [Google Scholar] [CrossRef]
- Eardley, D.M.; Lee, D.L.; Lightman, A.P. Gravitational-wave observations as a tool for testing relativistic gravity. Phys. Rev. D 1973, 8, 3308–3321. [Google Scholar] [CrossRef]
- Eardley, D.M.; Lee, D.L.; Lightman, A.P.; Wagoner, R.V.; Will, C.M. Gravitational-wave observations as a tool for testing relativistic gravity. Phys. Rev. Lett. 1973, 30, 884–886. [Google Scholar] [CrossRef]
- Chatziioannou, K.; Yunes, N.; Cornish, N. Model-Independent Test of General Relativity: An Extended post-Einsteinian Framework with Complete Polarization Content. Phys. Rev. D 2012, 86, 022004. [Google Scholar] [CrossRef]
- Gong, Y.; Papantonopoulos, E.; Yi, Z. Constraints on scalar–tensor theory of gravity by the recent observational results on gravitational waves. Eur. Phys. J. C 2018, 78, 738. [Google Scholar] [CrossRef]
- Sheard, B.S.; Gray, M.B.; McClelland, D.E.; Shaddock, D.A. Laser frequency stabilization by locking to a LISA arm. Phys. Lett. A 2003, 320, 9–21. [Google Scholar] [CrossRef]
- Herz, M. Active laser frequency stabilization and resolution enhancement of interferometers for the measurement of gravitational waves in space. Opt. Eng. 2005, 44, 090505. [Google Scholar] [CrossRef]
- Schulte, H.R.; Gath, P.F.; Herz, M. Laser frequency stabilization by using arm-locking. AIP Conf. Proc. 2006, 873, 379–383. [Google Scholar] [CrossRef]
- Tinto, M.; Armstrong, J. Cancellation of laser noise in an unequal-arm interferometer detector of gravitational radiation. Phys. Rev. D 1999, 59, 102003. [Google Scholar] [CrossRef]
- Armstrong, J.W.; Estabrook, F.B.; Tinto, M. Time-Delay Interferometry for Space-based Gravitational Wave Searches. Astrophys. J. 1999, 527, 814–826. [Google Scholar] [CrossRef]
- Tinto, M.; Dhurandhar, S.V. Time-delay interferometry. Living Rev. Rel. 2021, 24, 1. [Google Scholar] [CrossRef]
- Sutton, A.; Shaddock, D.A. Laser frequency stabilization by dual arm locking for LISA. Phys. Rev. D 2008, 78, 082001. [Google Scholar] [CrossRef]
- McKenzie, K.; Spero, R.E.; Shaddock, D.A. The Performance of arm locking in LISA. Phys. Rev. D 2009, 80, 102003. [Google Scholar] [CrossRef]
- Dhurandhar, S.V.; Rajesh Nayak, K.; Vinet, J.Y. Algebraic approach to time-delay data analysis for LISA. Phys. Rev. D 2002, 65, 102002. [Google Scholar] [CrossRef]
- Rajesh Nayak, K.; Vinet, J.Y. Algebraic approach to time-delay data analysis for orbiting LISA. Phys. Rev. D 2004, 70, 102003. [Google Scholar] [CrossRef]
- Vallisneri, M. Geometric time delay interferometry. Phys. Rev. D 2005, 72, 042003, Erratum in Phys. Rev. D 2007, 76, 109903. [Google Scholar] [CrossRef]
- Muratore, M.; Vetrugno, D.; Vitale, S. Revisitation of time delay interferometry combinations that suppress laser noise in LISA. Class. Quantum Gravity 2020, 37, 185019. [Google Scholar] [CrossRef]
- Muratore, M.; Vetrugno, D.; Vitale, S.; Hartwig, O. Time delay interferometry combinations as instrument noise monitors for LISA. Phys. Rev. D 2022, 105, 023009. [Google Scholar] [CrossRef]
- Wang, P.P.; Qian, W.L.; Tan, Y.J.; Wu, H.Z.; Shao, C.G. Geometric approach for the modified second generation time delay interferometry. Phys. Rev. D 2022, 106, 024003. [Google Scholar] [CrossRef]
- Tinto, M.; Dhurandhar, S.; Joshi, P. Matrix representation of time-delay interferometry. Phys. Rev. D 2021, 104, 044033. [Google Scholar] [CrossRef]
- Page, J.; Littenberg, T.B. Bayesian time delay interferometry. Phys. Rev. D 2021, 104, 084037. [Google Scholar] [CrossRef]
- Otto, M. Time-Delay Interferometry Simulations for the Laser Interferometer Space Antenna. Ph.D. Thesis, Leibniz Universität Hannover, Hannover, Germany, 2015. [Google Scholar] [CrossRef]
- Shaddock, D.A.; Tinto, M.; Estabrook, F.B.; Armstrong, J.W. Data combinations accounting for LISA spacecraft motion. Phys. Rev. D 2003, 68, 061303. [Google Scholar] [CrossRef]
- Petiteau, A.; Auger, G.; Halloin, H.; Jeannin, O.; Plagnol, E.; Pireaux, S.; Regimbau, T.; Vinet, J.Y. LISACode: A Scientific simulator of LISA. Phys. Rev. D 2008, 77, 023002. [Google Scholar] [CrossRef]
- Bayle, J.B.; Lilley, M.; Petiteau, A.; Halloin, H. Effect of filters on the time-delay interferometry residual laser noise for LISA. Phys. Rev. D 2019, 99, 084023. [Google Scholar] [CrossRef]
- Bayle, J.B. Simulation and Data Analysis for LISA: Instrumental Modeling, Time-Delay Interferometry, Noise-Reduction Permormance Study, and Discrimination of Transient Gravitational Signals. Ph.D. Thesis, Université Paris Diderot, Paris, France, 2019. [Google Scholar]
- Bayle, J.B.; Hartwig, O. Unified model for the LISA measurements and instrument simulations. Phys. Rev. D 2023, 107, 083019. [Google Scholar] [CrossRef]
- Hellings, R.; Giampieri, G.; Maleki, L.; Tinto, M.; Danzmann, K.; Hough, J.; Robertson, D. Heterodyne laser tracking at high Doppler rates. Opt. Commun. 1996, 124, 313–320. [Google Scholar] [CrossRef]
- Hellings, R.W. Elimination of clock jitter noise in spaceborne laser interferometers. Phys. Rev. D 2001, 64, 022002. [Google Scholar] [CrossRef]
- Tinto, M.; Estabrook, F.B.; Armstrong, J.W. Time delay interferometry for LISA. Phys. Rev. D 2002, 65, 082003. [Google Scholar] [CrossRef]
- Heinzel, G.; Esteban, J.J.; Barke, S.; Otto, M.; Wang, Y.; Garcia, A.F.; Danzmann, K. Auxiliary functions of the LISA laser link: Ranging, clock noise transfer and data communication. Class. Quantum Gravity 2011, 28, 094008. [Google Scholar] [CrossRef]
- Otto, M.; Heinzel, G.; Danzmann, K. TDI and clock noise removal for the split interferometry configuration of LISA. Class. Quantum Gravity 2012, 29, 205003. [Google Scholar] [CrossRef]
- Tinto, M.; Yu, N. Time-Delay Interferometry with optical frequency comb. Phys. Rev. D 2015, 92, 042002. [Google Scholar] [CrossRef]
- Tinto, M.; Hartwig, O. Time-Delay Interferometry and Clock-Noise Calibration. Phys. Rev. D 2018, 98, 042003. [Google Scholar] [CrossRef]
- Hartwig, O.; Bayle, J.B. Clock-jitter reduction in LISA time-delay interferometry combinations. Phys. Rev. D 2021, 103, 123027. [Google Scholar] [CrossRef]
- Shaddock, D.; Tinto, M.; Spero, R.; Schilling, R.; Jennrich, O.; Folkner, W. Candidate LISA Frequency (Modulation) Plan. In Proceedings of the 5th International LISA Symposium, Noordwijk, The Netherlands, 12–15 July 2021. [Google Scholar]
- Barke, S.; Tröbs, M.; Sheard, B.; Heinzel, G.; Danzmann, K. EOM sideband phase characteristics for the spaceborne gravitational wave detector LISA. Appl. Phys. B Lasers Opt. 2010, 98, 33–39. [Google Scholar] [CrossRef]
- Edler, D. Measurement and Modeling of USO Clock Noise in Space Based Applications. Ph.D. Thesis, Leibniz Universität Hannover, Hannover, Germany, 2014. [Google Scholar]
- Larson, S.L.; Hiscock, W.A.; Hellings, R.W. Sensitivity curves for spaceborne gravitational wave interferometers. Phys. Rev. D 2000, 62, 062001. [Google Scholar] [CrossRef]
- Vallisneri, M.; Crowder, J.; Tinto, M. Sensitivity and parameter-estimation precision for alternate LISA configurations. Class. Quantum Gravity 2008, 25, 065005. [Google Scholar] [CrossRef]
- Cornish, N.J.; Rubbo, L.J. The LISA response function. Phys. Rev. D 2003, 67, 022001. [Google Scholar] [CrossRef]
- Vallisneri, M.; Galley, C.R. Non-sky-averaged sensitivity curves for space-based gravitational-wave observatories. Class. Quantum Gravity 2012, 29, 124015. [Google Scholar] [CrossRef]
- Larson, S.L.; Hellings, R.W.; Hiscock, W.A. Unequal arm space borne gravitational wave detectors. Phys. Rev. D 2002, 66, 062001. [Google Scholar] [CrossRef]
- Zhang, C.; Gao, Q.; Gong, Y.; Liang, D.; Weinstein, A.J.; Zhang, C. Frequency response of time-delay interferometry for space-based gravitational wave antenna. Phys. Rev. D 2019, 100, 064033. [Google Scholar] [CrossRef]
- Liang, D.; Gong, Y.; Weinstein, A.J.; Zhang, C.; Zhang, C. Frequency response of space-based interferometric gravitational-wave detectors. Phys. Rev. D 2019, 99, 104027. [Google Scholar] [CrossRef]
- Blaut, A. Angular and frequency response of the gravitational wave interferometers in the metric theories of gravity. Phys. Rev. D 2012, 85, 043005. [Google Scholar] [CrossRef]
- Tinto, M.; da Silva Alves, M.E. LISA Sensitivities to Gravitational Waves from Relativistic Metric Theories of Gravity. Phys. Rev. D 2010, 82, 122003. [Google Scholar] [CrossRef]
- Lu, X.Y.; Tan, Y.J.; Shao, C.G. Sensitivity functions for space-borne gravitational wave detectors. Phys. Rev. D 2019, 100, 044042. [Google Scholar] [CrossRef]
- Zhang, C.; Gao, Q.; Gong, Y.; Wang, B.; Weinstein, A.J.; Zhang, C. Full analytical formulas for frequency response of space-based gravitational wave detectors. Phys. Rev. D 2020, 101, 124027. [Google Scholar] [CrossRef]
- Wang, P.P.; Tan, Y.J.; Qian, W.L.; Shao, C.G. Sensitivity functions of spaceborne gravitational wave detectors for arbitrary time-delay interferometry combinations. Phys. Rev. D 2021, 103, 063021. [Google Scholar] [CrossRef]
- Armstrong, J.W.; Estabrook, F.B.; Tinto, M. Sensitivities of alternate LISA configurations. Class. Quantum Gravity 2001, 18, 4059–4065. [Google Scholar] [CrossRef]
- Prince, T.A.; Tinto, M.; Larson, S.L.; Armstrong, J.W. The LISA optimal sensitivity. Phys. Rev. D 2002, 66, 122002. [Google Scholar] [CrossRef]
- Wang, P.P.; Tan, Y.J.; Qian, W.L.; Shao, C.G. Sensitivity functions of space-borne gravitational wave detectors for arbitrary time-delay interferometry combinations regarding nontensorial polarizations. Phys. Rev. D 2021, 104, 023002. [Google Scholar] [CrossRef]
- Wu, Z.Q.; Wang, P.P.; Qian, W.L.; Huang, W.S.; Tan, Y.J.; Shao, C.G. Extended combinatorial algebraic approach for the second-generation time-delay interferometry. Phys. Rev. D 2023, 108, 082002. [Google Scholar] [CrossRef]
- Wang, P.P.; Qian, W.L.; Wu, Z.Q.; Chen, H.K.; Huang, W.; Wu, H.Z.; Tan, Y.J.; Shao, C.G. Sensitivity functions for geometric time-delay interferometry combinations. Phys. Rev. D 2023, 108, 044075. [Google Scholar] [CrossRef]
- Wang, P.P.; Qian, W.L.; Wu, H.Z.; Tan, Y.J.; Shao, C.G. Arm locking in conjunction with time-delay interferometry. Phys. Rev. D 2022, 106, 104042. [Google Scholar] [CrossRef]
- Babak, S.; Petiteau, A.; Hewitson, M. LISA Sensitivity and SNR Calculations. arXiv 2021, arXiv:2108.01167. [Google Scholar]
- Colpiand, M. LISA Laser Interferometer Space Antenna -Definition Study-Report ESA-SCI-DIR-002; ESA Publication: Washington, DC, USA, 2023. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, P.-P.; Shao, C.-G. Time-Delay Interferometry: The Key Technique in Data Pre-Processing Analysis of Space-Based Gravitational Waves. Universe 2024, 10, 398. https://doi.org/10.3390/universe10100398
Wang P-P, Shao C-G. Time-Delay Interferometry: The Key Technique in Data Pre-Processing Analysis of Space-Based Gravitational Waves. Universe. 2024; 10(10):398. https://doi.org/10.3390/universe10100398
Chicago/Turabian StyleWang, Pan-Pan, and Cheng-Gang Shao. 2024. "Time-Delay Interferometry: The Key Technique in Data Pre-Processing Analysis of Space-Based Gravitational Waves" Universe 10, no. 10: 398. https://doi.org/10.3390/universe10100398
APA StyleWang, P.-P., & Shao, C.-G. (2024). Time-Delay Interferometry: The Key Technique in Data Pre-Processing Analysis of Space-Based Gravitational Waves. Universe, 10(10), 398. https://doi.org/10.3390/universe10100398