Energy-Efficient Wireless Hopping Sensor Relocation Based on Prediction of Terrain Conditions



Abstract
1. Introduction
2. Previous Work
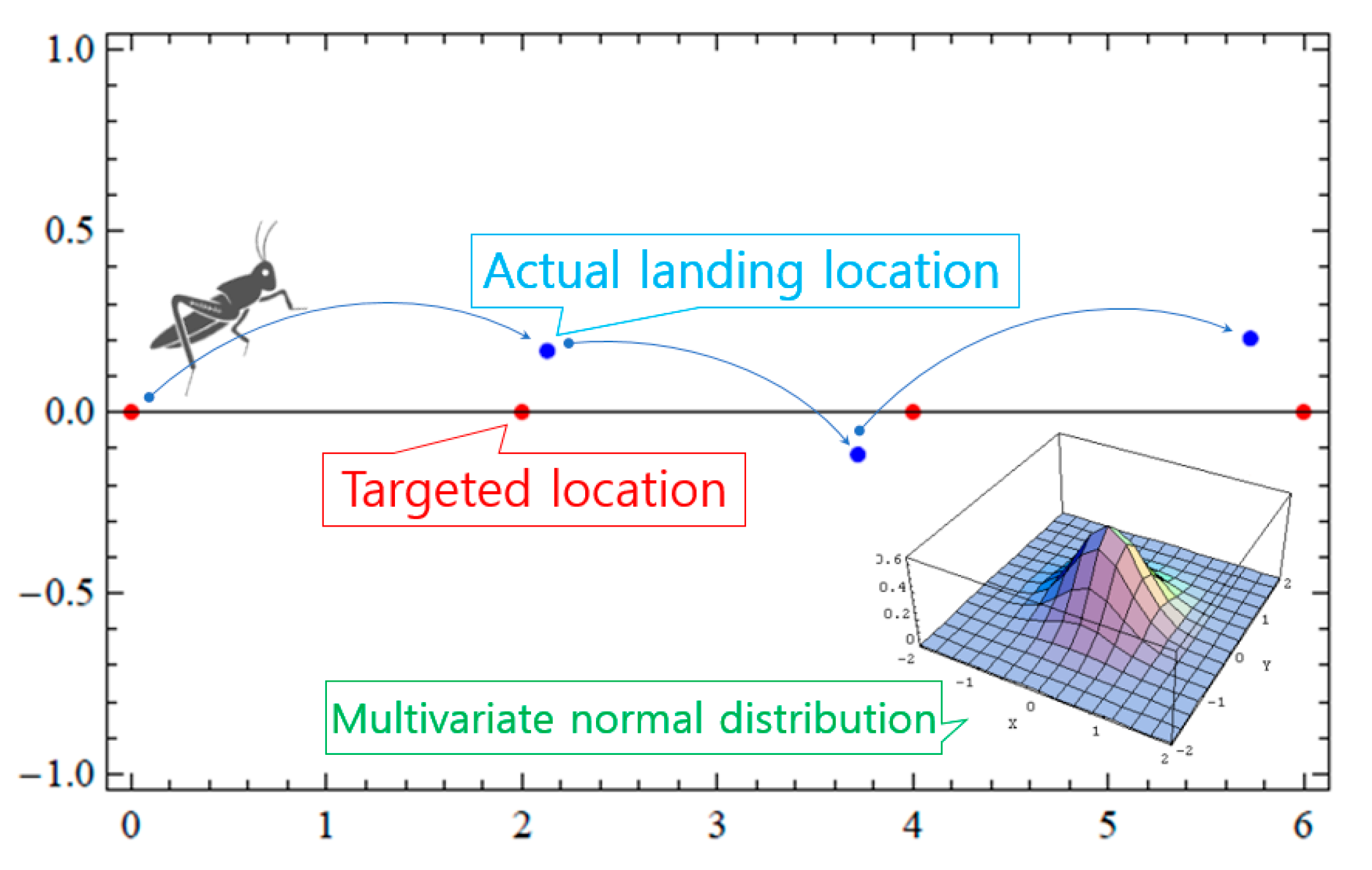
2.1. Characteristics and Movement Models of Hopping Sensors
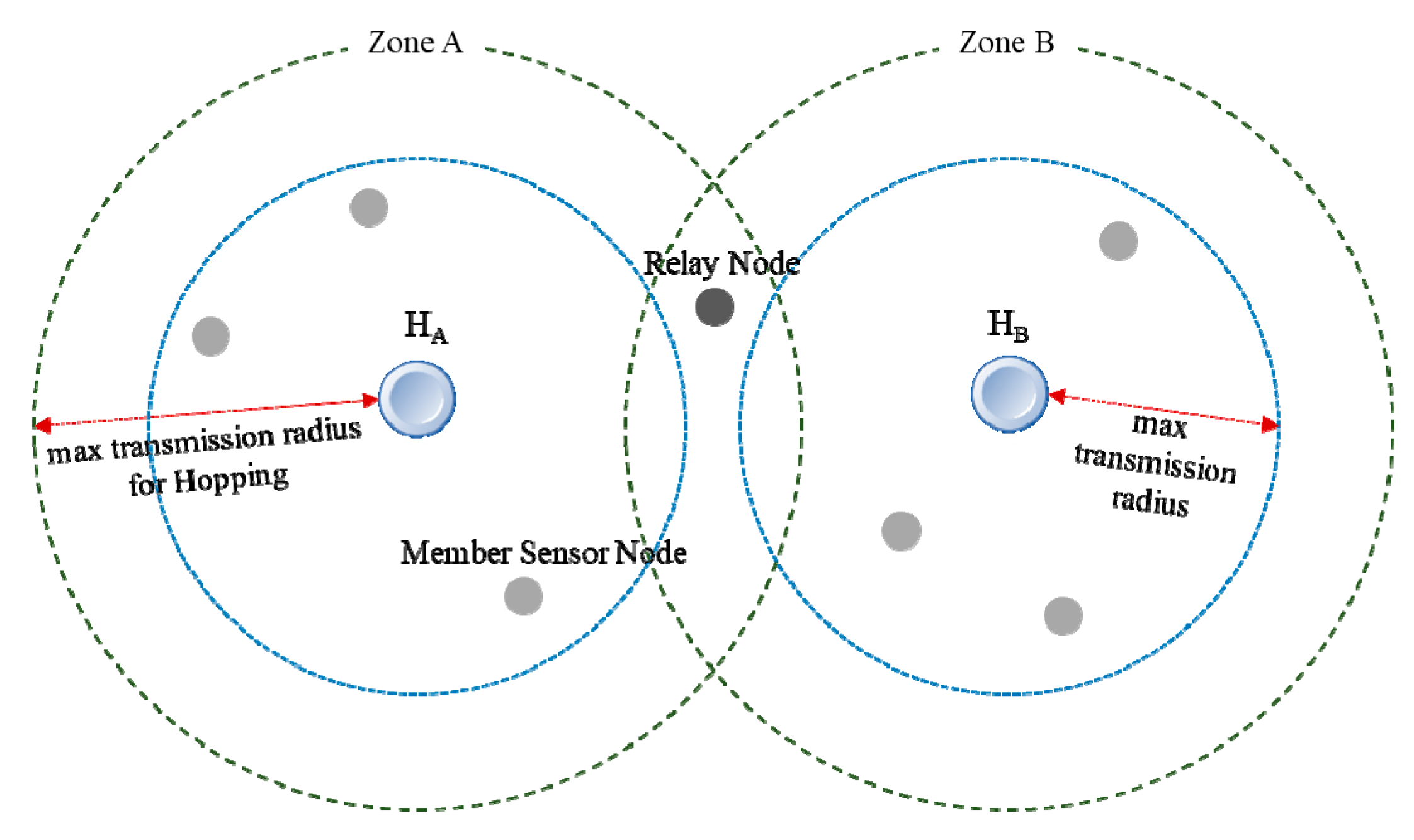
2.2. Basic Assumptions about Hopping Sensors and Relocation Protocol
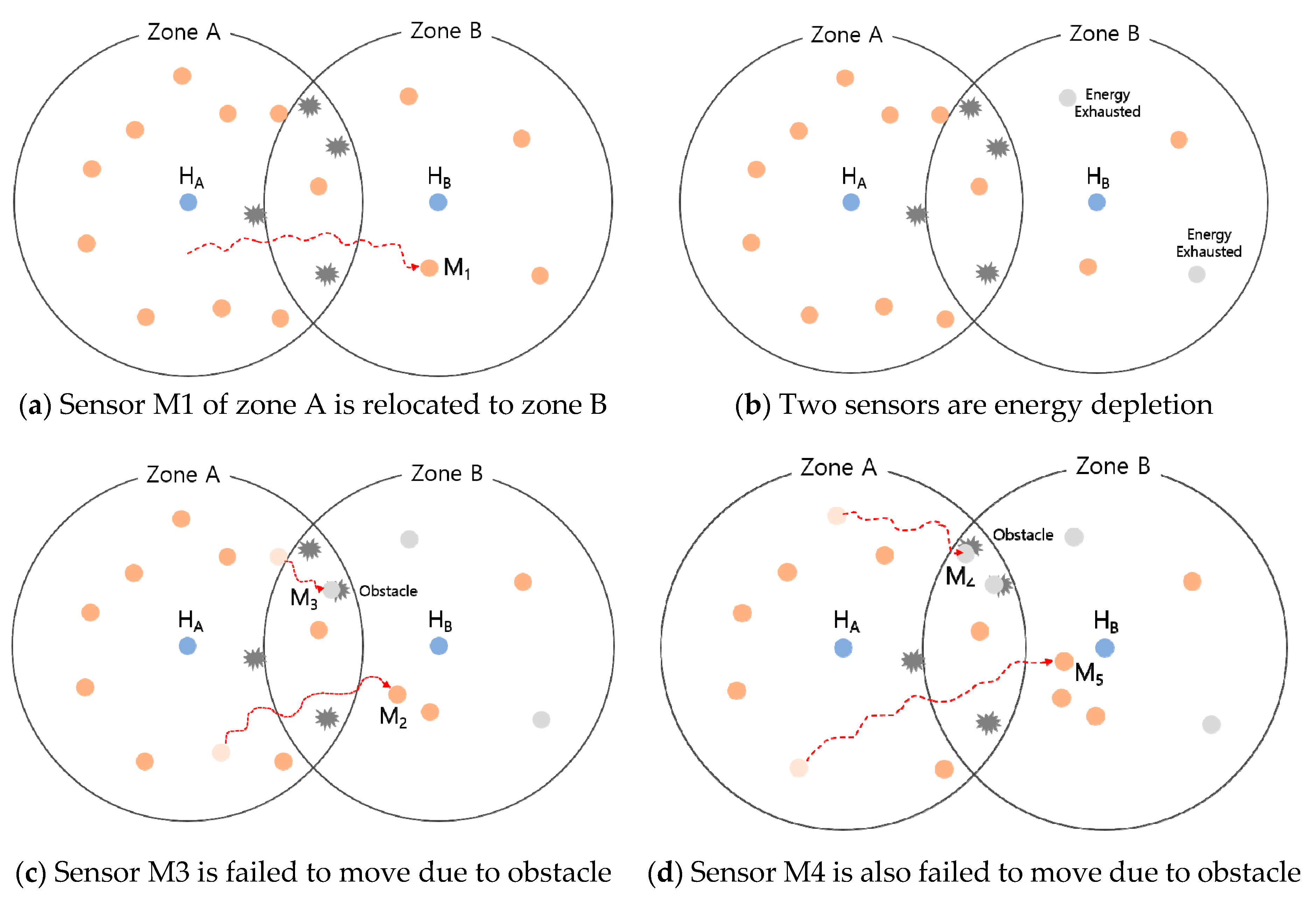
3. The Proposed Relocation Protocol for Rugged Terrains
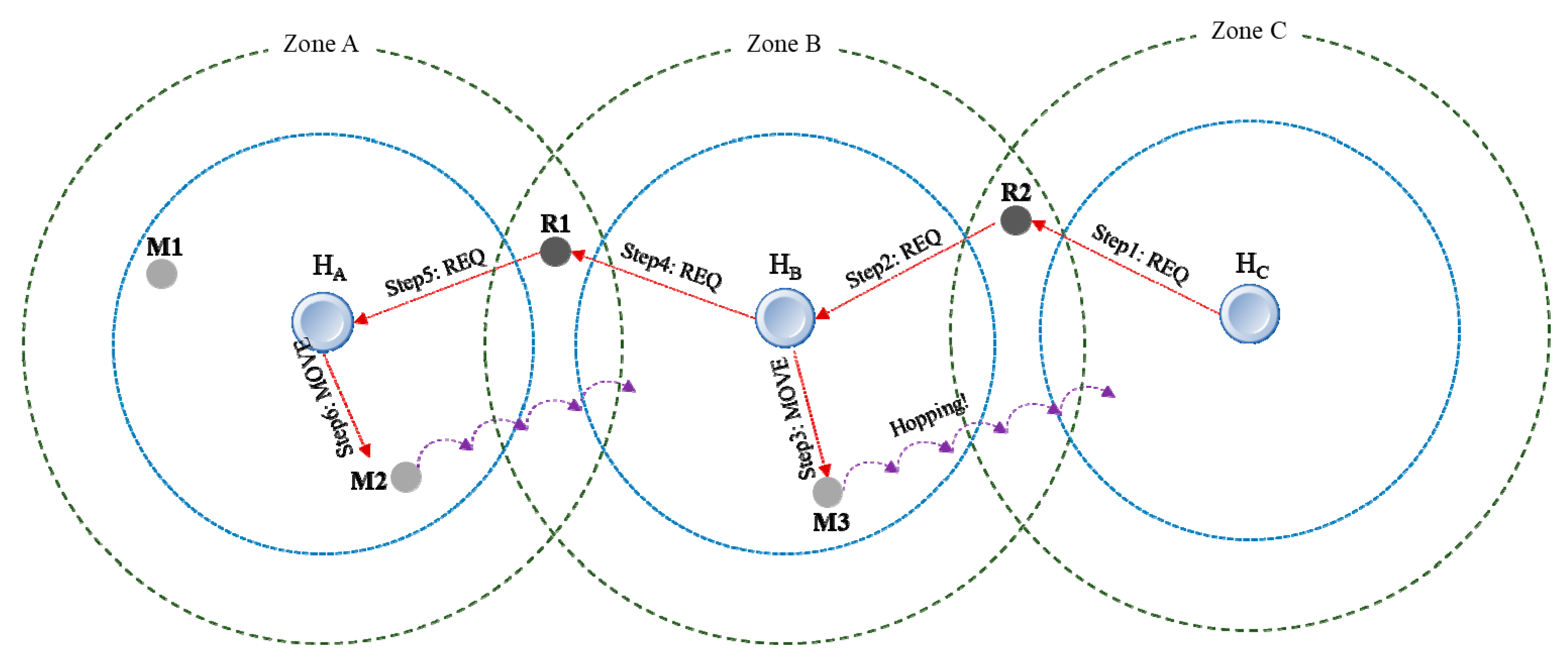
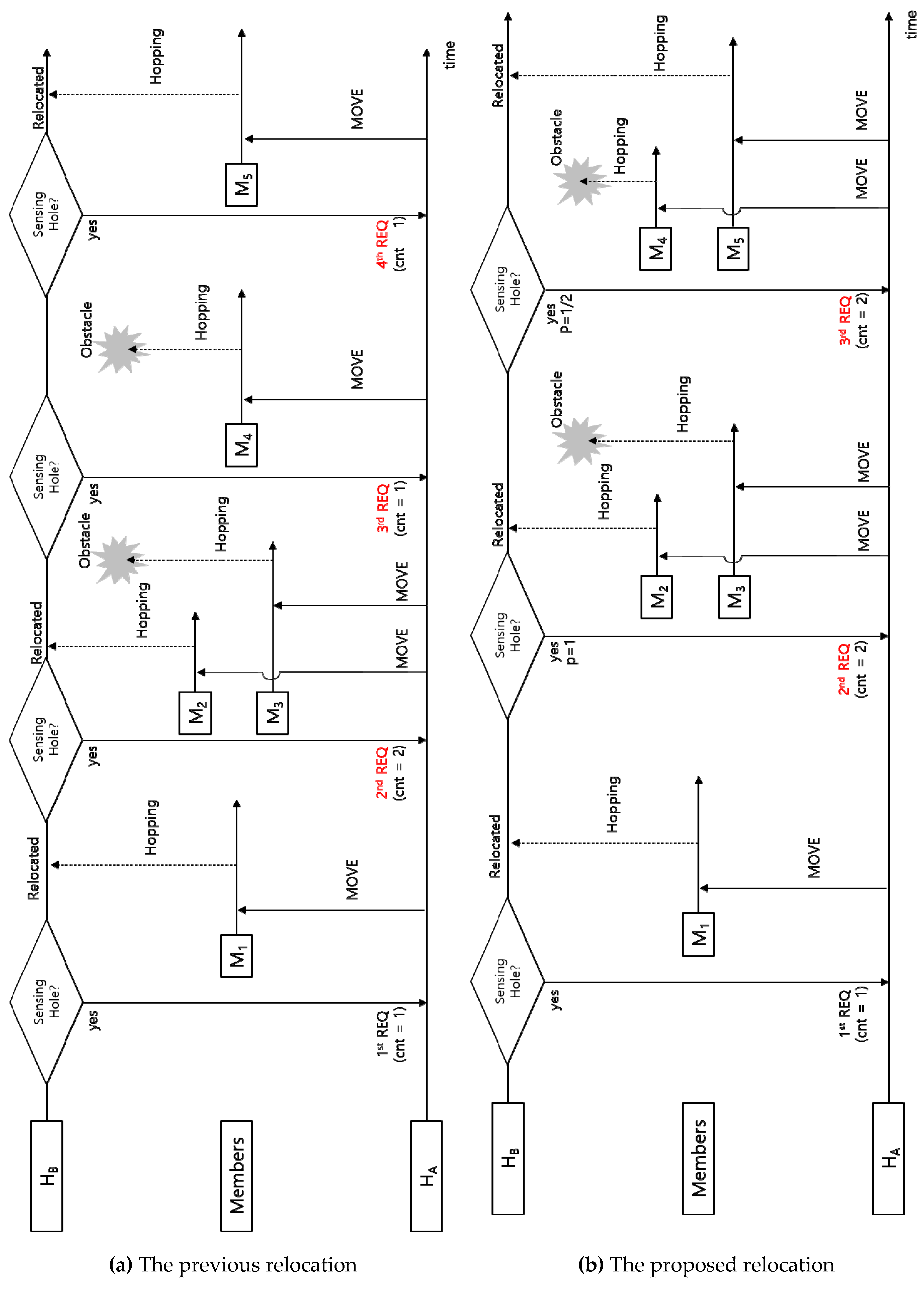
3.1. Basic Operation of the Proposed Relocation Protocol
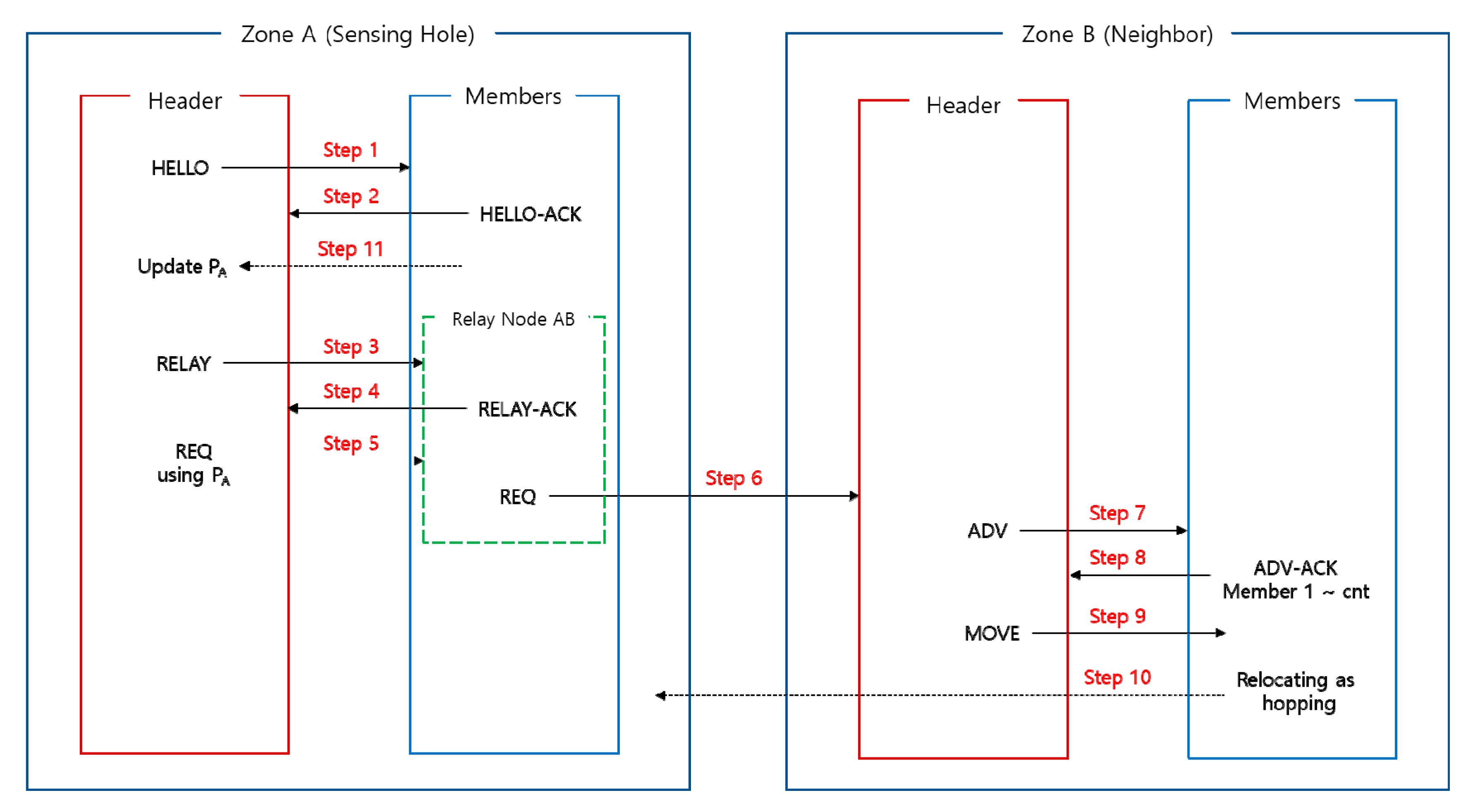
3.2. Descriptions of the Proposed Protocol
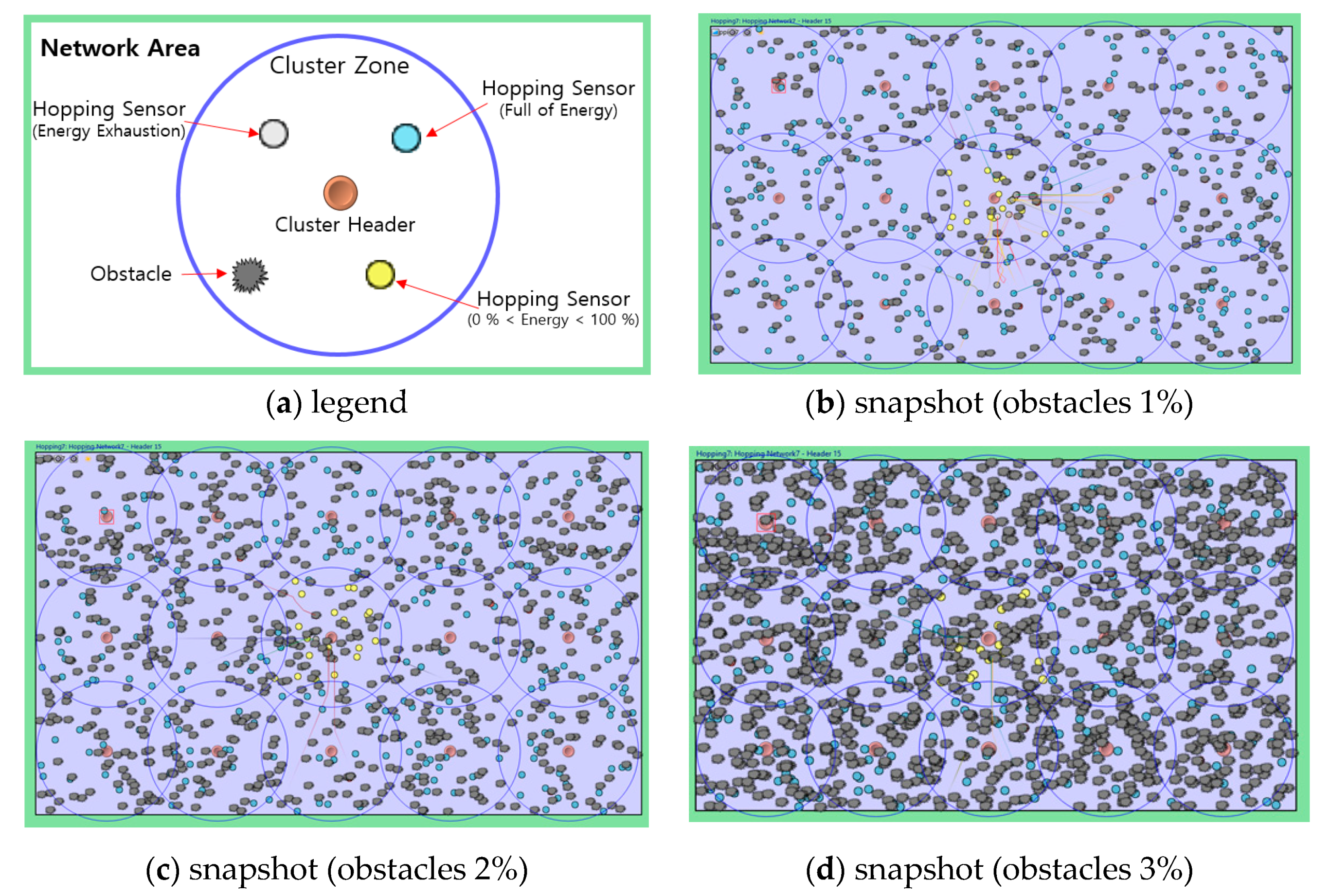
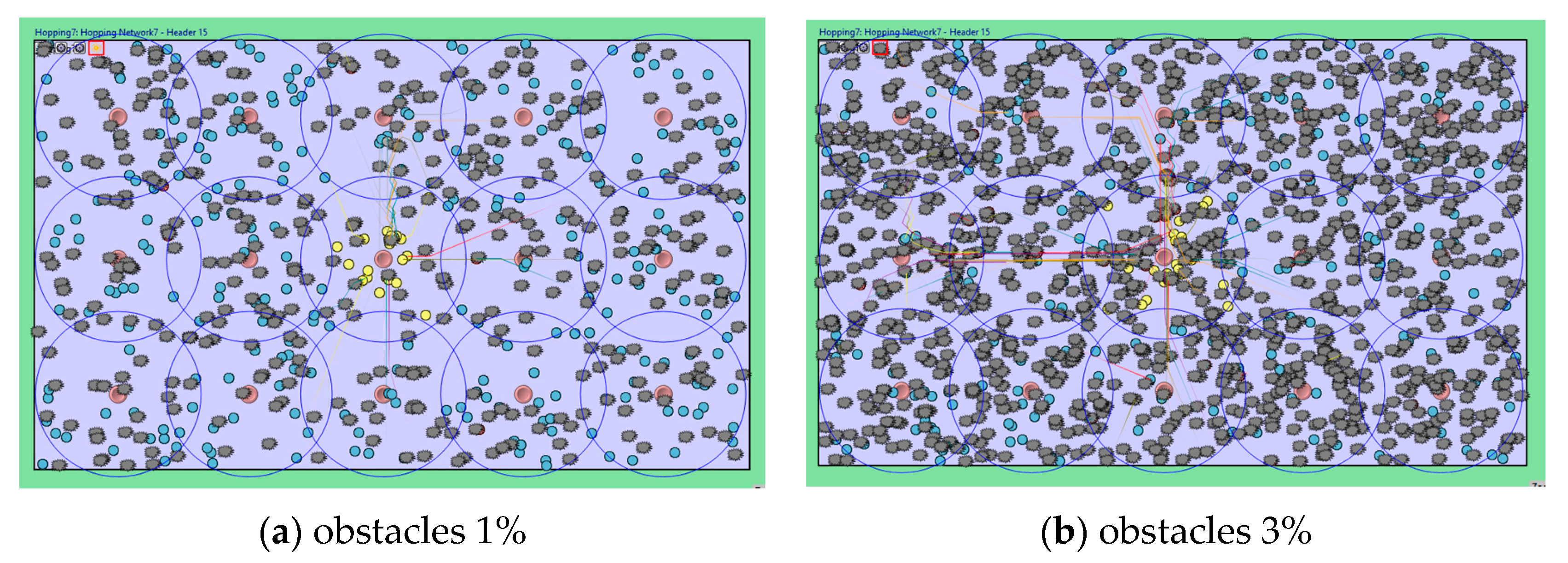
4. Simulation Results and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yu, S.; Liu, M.; Dou, W.; Liu, X.; Zhou, S. Networking for Big Data: A Survey. IEEE Commun. Surv. Tutor. 2017, 19, 531–549. [Google Scholar] [CrossRef]
- Chen, M.; Mao, S.; Liu, Y. Big Data: A Survey. Mob. Netw. Appl. 2014, 19, 171–209. [Google Scholar] [CrossRef]
- Yaqoob, I.; Ahmed, E.; Hashem, I.A.T.; Ahmed, A.I.A.; Gani, A.; Imran, M.; Guizani, M. Internet of Things Architecture: Recent Advances, Taxonomy, Requirements, and Open Challenges. IEEE Wirel. Commun. 2017, 24, 10–16. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiong, Z.; Niyato, D.; Wang, P.; Kim, D.I. Toward a Perpetual IoT System: Wireless Power Management Policy With Threshold Structure. IEEE Internet Things J. 2018, 5, 5254–5270. [Google Scholar] [CrossRef]
- Ray, P.P.; Mukherjee, M.; Shu, L. Internet of Things for Disaster Management: State-of-the-Art and Prospects. IEEE Access 2017, 5, 18818–18835. [Google Scholar] [CrossRef]
- Chudzikiewicz, J.; Furtak, J.; Zielinski, Z. Fault-tolerant techniques for the Internet of Military Things. In Proceedings of the IEEE 2nd World Forum on Internet of Things (WF-IoT), Milan, Italy, 14–16 December 2015; pp. 496–501. [Google Scholar]
- Kosar, R.; Onur, E.; Ersoy, C. Redeployment Based Sensing Hole Mitigation in Wireless Sensor Networks. In Proceedings of the IEEE 2009 Wireless Communications and Networking Conference (WCNC), Budapest, Hungary, 5–8 April 2009. [Google Scholar]
- Kim, M.; Park, S.; Lee, W. A Robust Energy Saving Data Dissemination Protocol for IoT-WSNs. In KSII Transactions on Internet and Information Systems (TIIS); 2018; pp. 5744–5764. [Google Scholar] [CrossRef]
- Kim, M.; Jeong, E.; Bang, Y.-C.; Hwang, S.; Shin, C.; Jin, G.-J.; Kim, B. An Energy-aware Multipath Routing Algorithm in Wireless Sensor Networks. IEICE Trans. Inf. Syst. 2008, 91, 2419–2427. [Google Scholar] [CrossRef]
- Elappila, M.; Chinara, S.; Parhi, D.R. Survivable Path Routing in WSN for IoT applications. Pervasive Mob. Comput. 2018, 43, 49–63. [Google Scholar] [CrossRef]
- Luo, R.C.; Huang, J.-T.; Chen, O. A Triangular Selection Path Planning Method with Dead Reckoning System for Wireless Mobile Sensor Mote. In Proceedings of the 2006 IEEE International Conference on Systems, Man and Cybernetics, Taipei, Taiwan, 8–11 October 2006; pp. 162–168. [Google Scholar]
- Chellappan, S.; Snyder, M.E.; Thakur, M. Distributed exploratory coverage with limited mobility. Int. J. Space-Based Situated Comput. 2014, 4, 114–124. [Google Scholar] [CrossRef]
- Snyder, M.E. Foundations of Coverage Algorithms in Autonomic Mobile Sensor Networks. Ph.D. Thesis, Missouri University of Science and Technology, Rolla, MO, USA, 2014. [Google Scholar]
- Zhao, J.; Xu, J.; Gao, B.; Xi, N.; Cintrón, F.J.; Mutka, M.W.; Xiao, L. MSU Jumper: A Single-Motor-Actuated Miniature Steerable Jumping Robot. IEEE Trans. Robot. 2013, 29, 602–614. [Google Scholar] [CrossRef]
- Cen, Z.; Mutka, M.W. Relocation of Hopping Sensors. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 08), Pasadena, CA, USA, 19–23 May 2008; pp. 569–574. [Google Scholar]
- Kim, M.; Mutka, M.W. On Relocation of Hopping Sensors for Balanced Migration Distribution of Sensors; Springer: Berlin, Heidelberg, 2009; pp. 361–371. [Google Scholar]
- Kim, M.; Mutka, M.W. Multipath-based Relocation Schemes Considering Balanced Assignment for Hopping Sensors. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 09), St. Louis, MO, USA, 10–15 October 2009; pp. 5095–5100. [Google Scholar]
- Kim, M.; Mutka, M.W.; Choo, H. On Relocation of Hopping Sensors for Rugged Terrains. In Proceedings of the IEEE International Conference on Computational Sciences and its Applications (ICCSA 10), Fukuoka, Japan, 23–26 March 2010; pp. 203–210. [Google Scholar]
- Kim, M.; Park, S.; Lee, W. Energy and Distance-Aware Hopping Sensor Relocation for Wireless Sensor Networks. Sensors 2019, 19, 1567. [Google Scholar] [CrossRef] [PubMed]
- OMNeT Web Site. Available online: https://www.omnetpp.org (accessed on 9 December 2019).
- Cintr’on, F.; Pongaliur, K.; Mutka, M.W.; Xiao, L.; Zhao, J.; Xi, N. Leveraging height in a jumping sensor network to extend network coverage. IEEE Trans. Wirel. Commun. 2012, 11, 1840–1849. [Google Scholar] [CrossRef]
- Cintr’on, F. Network Issues for 3D Wireless Sensors Networks. Ph.D. Thesis, Michigan State University, East Lansing, MI, USA, 2013. [Google Scholar]
- Kim, M.; Kim, T.; Shon, M.; Kim, M.; Choo, H. Design of a Transmission Process for Hopping Sensors to Enhance Coverage. In Proceedings of the International Conference Wireless Networks (ICWN 10), Las Vegas, NV, USA, 12–15 July 2010; pp. 377–382. [Google Scholar]
- Rostami, A.S.; Badkoobe, M.; Mohanna, F.; Keshavarz, H.; Hosseinabadi, A.A.R.; Sangaiah, A.K. Survey on clustering in heterogeneous and homogeneous wireless sensor networks. J. Supercomput. 2018, 74, 277–323. [Google Scholar] [CrossRef]
- Sabor, N.; Sasaki, S.; Abo-Zahhad, M.; Ahmed, S.M. A Comprehensive Survey on Hierarchical-Based Routing Protocols for Mobile Wireless Sensor Networks: Review, Taxonomy, and Future Directions, Hindawi. Wirel. Commun. Mob. Comput. 2017, 2017, 23. [Google Scholar] [CrossRef]
- Zarrad, A.; Alsmadi, I. Evaluating network test scenarios for network simulators systems. International J. Distrib. Sens. Netw. 2017, 13, 1550147717738216. [Google Scholar] [CrossRef]
- Virdis, A.; Kirsche, M. Recent Advances in Network Simulation: The OMNeT++ Environment and Its Ecosystem; Springer: Cham, Switzerland, 2019. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| network area | 250 m × 150 m |
| number of all member hopping sensor nodes | 285 |
| number of cluster headers | 15 |
| minimum number of members for each cluster to properly gather data (i.e., a sensing hole occurs if number of current members lower than the value) | 10 |
| the probability that an obstacle exists | 0%, 1%, 2%, 3% |
| maximum communication radius for each sensor node | 20 m |
| maximum communication radius when highly jumping | 29 m |
| maximum distance that a sensor node moves forward with one jump | 2 m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, S.; Kim, M.; Lee, W. Energy-Efficient Wireless Hopping Sensor Relocation Based on Prediction of Terrain Conditions. Electronics 2020, 9, 49. https://doi.org/10.3390/electronics9010049
Park S, Kim M, Lee W. Energy-Efficient Wireless Hopping Sensor Relocation Based on Prediction of Terrain Conditions. Electronics. 2020; 9(1):49. https://doi.org/10.3390/electronics9010049
Chicago/Turabian StylePark, Sooyeon, Moonseong Kim, and Woochan Lee. 2020. "Energy-Efficient Wireless Hopping Sensor Relocation Based on Prediction of Terrain Conditions" Electronics 9, no. 1: 49. https://doi.org/10.3390/electronics9010049
APA StylePark, S., Kim, M., & Lee, W. (2020). Energy-Efficient Wireless Hopping Sensor Relocation Based on Prediction of Terrain Conditions. Electronics, 9(1), 49. https://doi.org/10.3390/electronics9010049