A Multi-Switching Tracking Control Scheme for Autonomous Mobile Robot in Unknown Obstacle Environments


Abstract
1. Introduction
2. Problem Statement
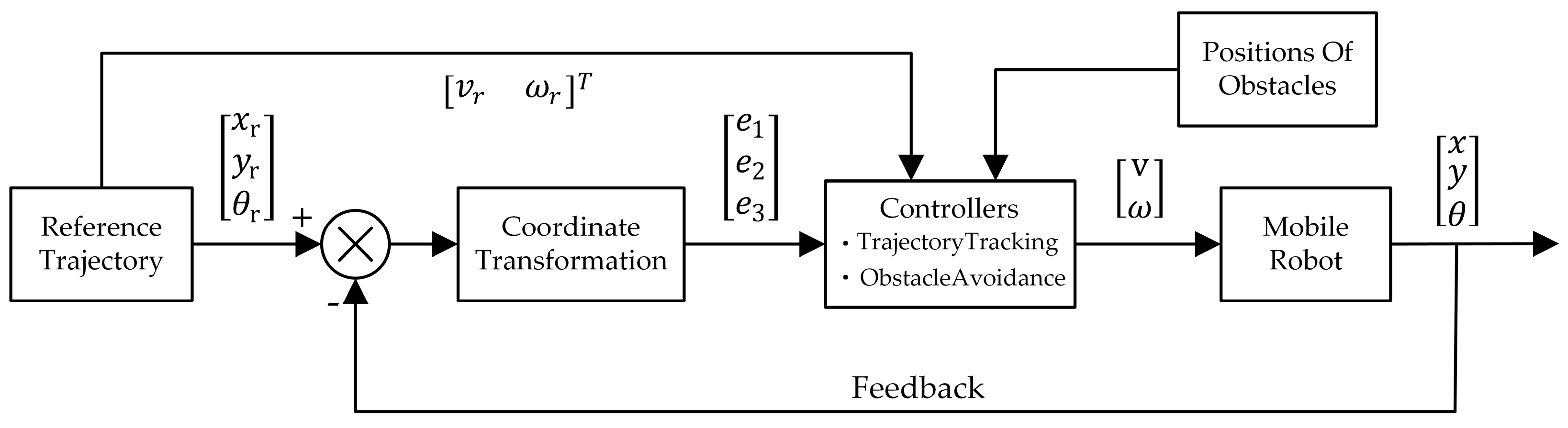
3. Methodology
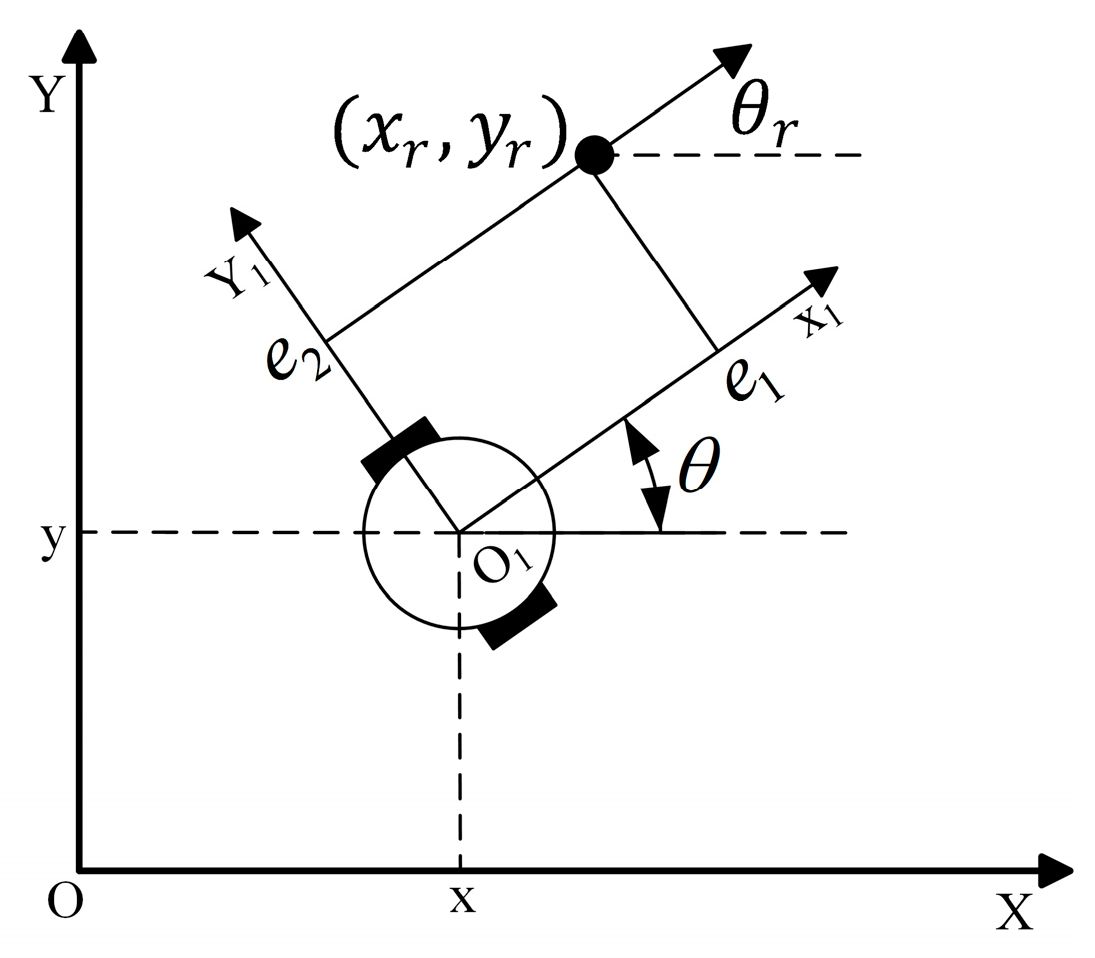
3.1. Trajectory Tracking Control
3.2. Obstacle Avoidance Control
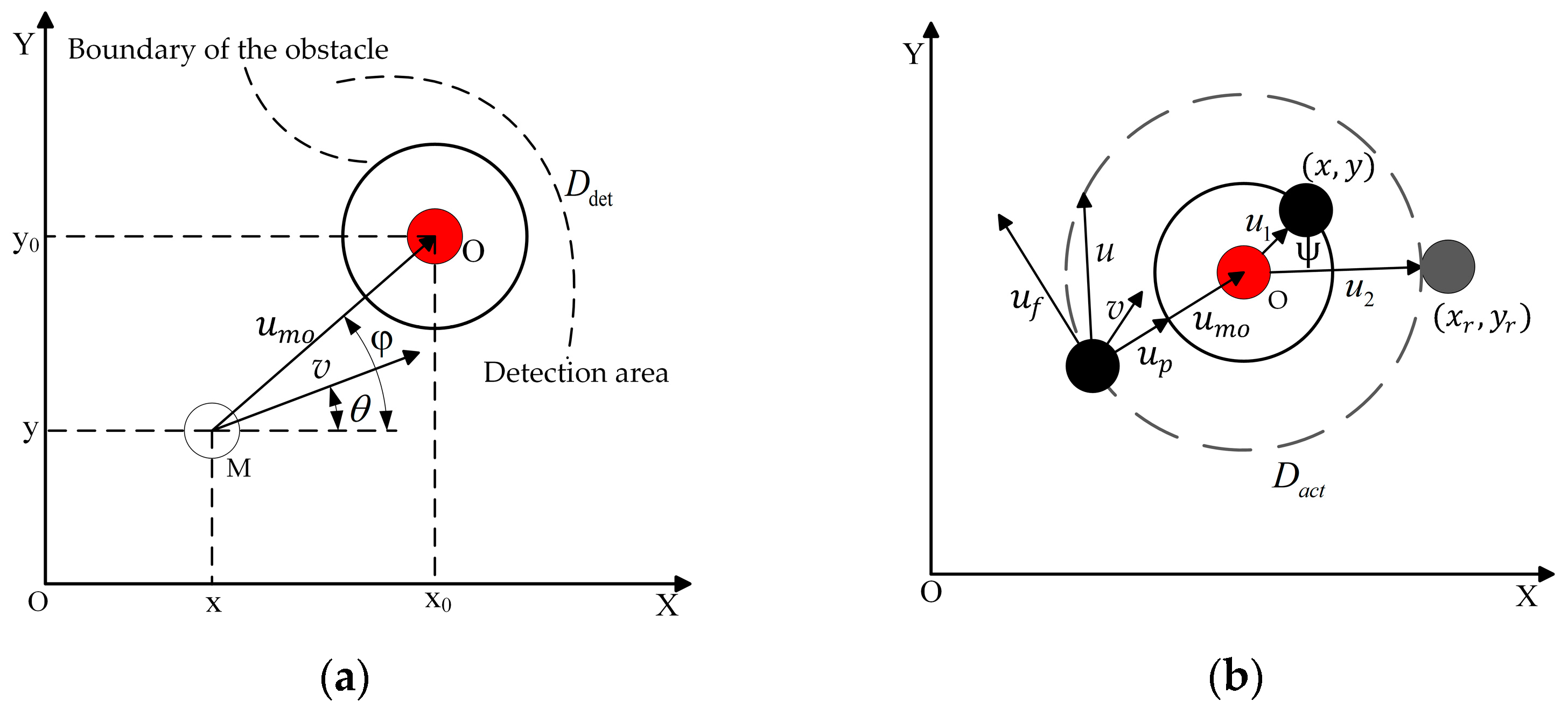
3.2.1. Analysis of Obstacle Avoidance Problem
3.2.2. Obstacle Avoidance Control Design
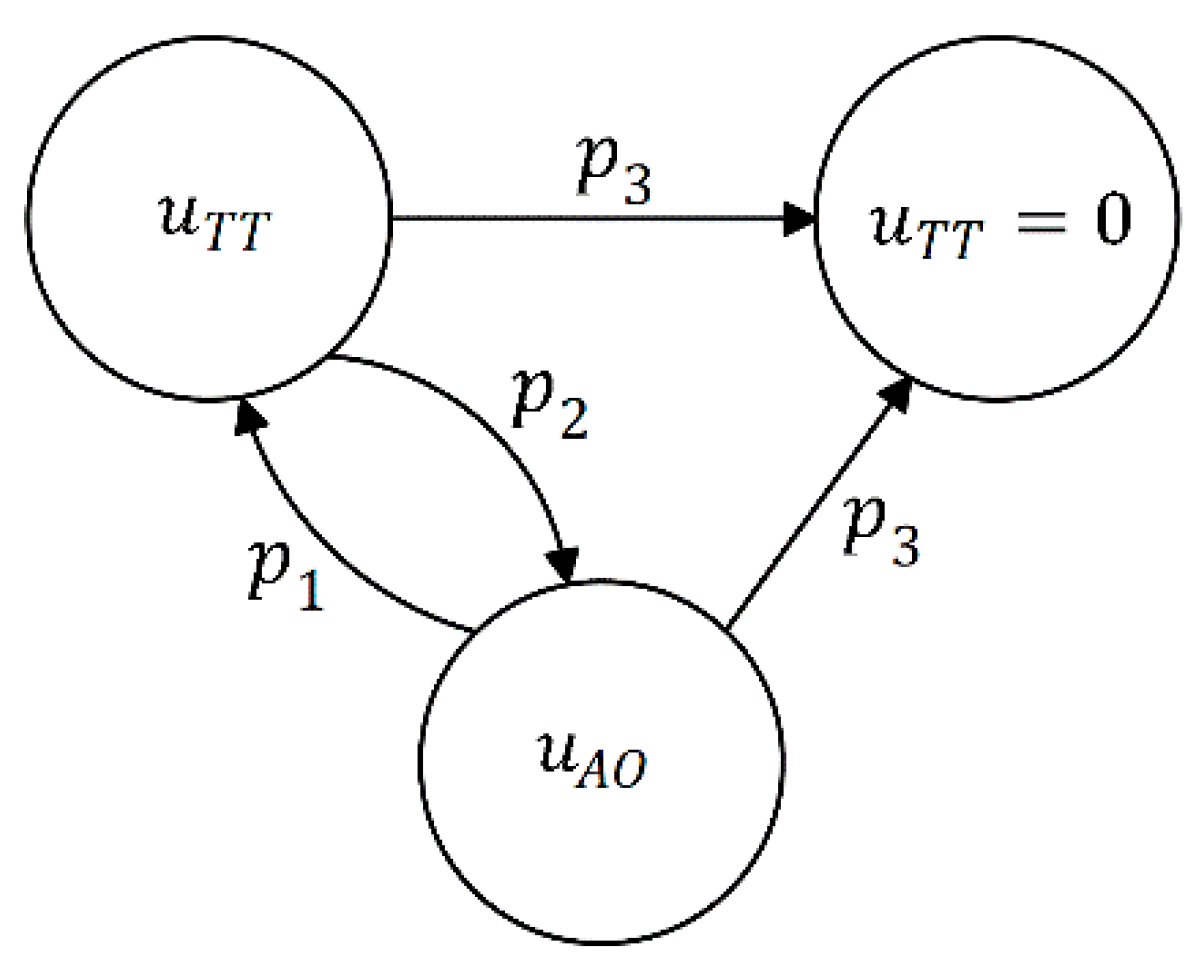
4. Switch Strategy
5. Simulation Results and Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhao, J.C.; Gao, J.Y.; Zhao, F.Z.; Liu, Y. A Search-and-Rescue Robot System for Remotely Sensing the Underground Coal Mine Environment. Sensors 2017, 17, 2426. [Google Scholar] [CrossRef]
- Kowalczyk, W. Formation Control and Distributed Goal Assignment for Multi-Agent Non-Holonomic Systems. Appl. Sci. 2019, 9, 23. [Google Scholar] [CrossRef]
- Consolini, L.; Morbidi, F.; Prattichizzo, D.; Tosques, M. Leader-follower formation control of nonholonomic mobile robots with input constraints. Automatica 2008, 44, 1343–1349. [Google Scholar] [CrossRef]
- Galasso, F.; Rizzini, D.L.; Oleari, F.; Caselli, S. Efficient calibration of four wheel industrial AGVs. Robot. Comput. Integr. Manuf. 2019, 57, 116–128. [Google Scholar] [CrossRef]
- Villagra, J.; Herrero-Perez, D. A Comparison of Control Techniques for Robust Docking Maneuvers of an AGV. IEEE Trans. Control Syst. Technol. 2012, 20, 1116–1123. [Google Scholar] [CrossRef]
- Bhat, S.; Meenakshi, M. Military Robot Path Control Using RF Communication. Proc. First Int. Conf. Intell. Comput. Commun. 2017, 458, 697–704. [Google Scholar] [CrossRef]
- Adamczyk, M.; Bulandra, K.; Moczulski, W. Autonomous mobile robotic system for supporting counterterrorist and surveillance operations. In Counterterrorism, Crime Fighting, Forensics, and Surveillance Technologies; Bouma, H., CarlysleDavies, F., Stokes, R.J., Yitzhaky, Y., Eds.; Spie-Int Soc Optical Engineering: Bellingham, WA, USA, 2017; Volume 10441. [Google Scholar]
- Ali, M.A.H.; Mailah, M. Path Planning and Control of Mobile Robot in Road Environments Using Sensor Fusion and Active Force Control. IEEE Trans. Veh. Technol. 2019, 68, 2176–2195. [Google Scholar] [CrossRef]
- Rostami, S.M.H.; Sangaiah, A.K.; Wang, J.; Liu, X.Z. Obstacle avoidance of mobile robots using modified artificial potential field algorithm. Eurasip J. Wirel. Commun. Netw. 2019, 19. [Google Scholar] [CrossRef]
- Orozco-Rosas, U.; Montiel, O.; Sepulveda, R. Mobile robot path planning using membrane evolutionary artificial potential field. Appl. Soft Comput. 2019, 77, 236–251. [Google Scholar] [CrossRef]
- Xue, Y. Mobile Robot Path Planning with a Non-Dominated Sorting Genetic Algorithm. Appl. Sci. 2018, 8, 27. [Google Scholar] [CrossRef]
- Elhoseny, M.; Tharwat, A.; Hassanien, A.E. Bezier Curve Based Path Planning in a Dynamic Field using Modified Genetic Algorithm. J. Comput. Sci. 2018, 25, 339–350. [Google Scholar] [CrossRef]
- Nazarahari, M.; Khanmirza, E.; Doostie, S. Multi-objective multi-robot path planning in continuous environment using an enhanced genetic algorithm. Expert Syst. Appl. 2019, 115, 106–120. [Google Scholar] [CrossRef]
- Antonakis, A.; Nikolaidis, T.; Pilidis, P. Multi-Objective Climb Path Optimization for Aircraft/Engine Integration Using Particle Swarm Optimization. Appl. Sci. 2017, 7, 22. [Google Scholar] [CrossRef]
- Yang, H.; Qi, J.; Miao, Y.C.; Sun, H.X.; Li, J.H. A New Robot Navigation Algorithm Based on a Double-Layer Ant Algorithm and Trajectory Optimization. IEEE Trans. Ind. Electron. 2019, 66, 8557–8566. [Google Scholar] [CrossRef]
- Lin, T.C.; Chen, C.C.; Lin, C.J. Wall-following and Navigation Control of Mobile Robot Using Reinforcement Learning Based on Dynamic Group Artificial Bee Colony. J. Intell. Robot. Syst. 2018, 92, 343–357. [Google Scholar] [CrossRef]
- Matveev, A.S.; Wang, C.; Saykin, A.V. Real-time navigation of mobile robots in problems of border patrolling and avoiding collisions with moving and deforming obstacles. Robot. Auton. Syst. 2012, 60, 769–788. [Google Scholar] [CrossRef]
- Wang, C.; Savkin, A.V.; Garratt, M. A strategy for safe 3D navigation of non-holonomic robots among moving obstacles. Robotica 2018, 36, 275–297. [Google Scholar] [CrossRef]
- Thanh, H.; Phi, N.N.; Hong, S.K. Simple nonlinear control of quadcopter for collision avoidance based on geometric approach in static environment. Int. J. Adv. Robot. Syst. 2018, 15, 17. [Google Scholar] [CrossRef]
- Maurovic, I.; Baotic, M.; Petrovic, I. Explicit Model Predictive Control for Trajectory Tracking with Mobile Robots. In Proceedings of the 2011 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Budapest, Hungary, 3–7 July 2011; IEEE: New York, NY, USA, 2011; pp. 712–717. [Google Scholar]
- Klancar, G.; Krjanc, I. Tracking-error model-based predictive control for mobile robots in real time. Robot. Auton. Syst. 2007, 55, 460–469. [Google Scholar] [CrossRef]
- Kumar, P.; Anoohya, B.B.; Padhi, R. Model Predictive Static Programming for Optimal Command Tracking: A Fast Model Predictive Control Paradigm. J. Dyn. Syst. Meas. Control. Trans. ASME 2019, 141, 12. [Google Scholar] [CrossRef]
- Woo, C.; Lee, M.; Yoon, T. Robust Trajectory Tracking Control of a Mecanum Wheeled Mobile Robot Using Impedance Control and Integral Sliding Mode Control. J. Korea Robot. Soc. 2018, 13, 256–264. [Google Scholar] [CrossRef]
- Sahloul, S.; Benhalima, D.; Rekik, C. Tracking trajectory of a mobile robot using sliding mode control. In Proceedings of the 2018 15th International Multi-Conference on Systems, Signals And Devices, Hammamet, Tunisia, 19–22 March 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1386–1390. [Google Scholar]
- Goswami, N.K.; Padhy, P.K. Sliding mode controller design for trajectory tracking of a non-holonomic mobile robot with disturbance. Comput. Electr. Eng. 2018, 72, 307–323. [Google Scholar] [CrossRef]
- Mu, J.Q.; Yan, X.G.; Spurgeon, S.K.; Mao, Z.H. Generalized Regular Form Based SMC for Nonlinear Systems With Application to a WMR. IEEE Trans. Ind. Electron. 2017, 64, 6714–6723. [Google Scholar] [CrossRef]
- Falsafi, M.H.; Alipour, K.; Tarvirdizadeh, B. Tracking-Error Fuzzy-Based Control for Nonholonomic Wheeled Robots. Arab. J. Sci. Eng. 2019, 44, 881–892. [Google Scholar] [CrossRef]
- Abbas, M.A.; Milman, R.; Eklund, J.M. Obstacle Avoidance in Real Time With Nonlinear Model Predictive Control of Autonomous Vehicles. Can. J. Electr. Comput. Eng. Rev. Can. Genie Electr. Inform. 2017, 40, 12–22. [Google Scholar] [CrossRef]
- Castillo, O.; Martinez-Marroquin, R.; Melin, P.; Valdez, F.; Soria, J. Comparative study of bio-inspired algorithms applied to the optimization of type-1 and type-2 fuzzy controllers for an autonomous mobile robot. Inf. Sci. 2012, 192, 19–38. [Google Scholar] [CrossRef]
- Shu, P.F.; Oya, M.; Zhao, J.J. A new adaptive tracking control scheme of wheeled mobile robot without longitudinal velocity measurement. Int. J. Robust Nonlinear Control 2018, 28, 1789–1807. [Google Scholar] [CrossRef]
- Cui, M.Y.; Liu, H.Z.; Liu, W.; Qin, Y. An Adaptive Unscented Kalman Filter-based Controller for Simultaneous Obstacle Avoidance and Tracking of Wheeled Mobile Robots with Unknown Slipping Parameters. J. Intell. Robot. Syst. 2018, 92, 489–504. [Google Scholar] [CrossRef]
- Wang, Y.; Shuoyu, W.; Tan, R.; Jiang, Y. Adaptive control method for path tracking of wheeled mobile robot considering parameter changes. Int. J. Adv. Mechatron. Syst. 2012, 4, 41–49. [Google Scholar] [CrossRef]
- Rahmani, B.; Belkheiri, M. Adaptive neural network output feedback control for flexible multi-link robotic manipulators. Int. J. Control 2019, 92, 2324–2338. [Google Scholar] [CrossRef]
- Abdelhakim, G.; Abdelouahab, H. A New Approach for Controlling a Trajectory Tracking Using Intelligent Methods. J. Electr. Eng. Technol. 2019, 14, 1347–1356. [Google Scholar] [CrossRef]
- Yoo, S.J. Adaptive tracking and obstacle avoidance for a class of mobile robots in the presence of unknown skidding and slipping. IET Control Theory Appl. 2011, 5, 1597–1608. [Google Scholar] [CrossRef]
- Yang, H.J.; Fan, X.Z.; Shi, P.; Hua, C.C. Nonlinear Control for Tracking and Obstacle Avoidance of a Wheeled Mobile Robot With Nonholonomic Constraint. IEEE Trans. Control Syst. Technol. 2016, 24, 741–746. [Google Scholar] [CrossRef]
- Kowalczyk, W.; Michalek, M.; Kozlowski, K. Trajectory tracking control with obstacle avoidance capability for unicycle-like mobile robot. Bull. Pol. Acad. Sci. Tech. Sci. 2012, 60, 537–546. [Google Scholar] [CrossRef]
- Ji, J.; Khajepour, A.; Melek, W.W.; Huang, Y. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints. IEEE Trans. Veh. Technol. 2017, 66, 952–964. [Google Scholar] [CrossRef]
- Ha, L.N.N.T.; Bui, D.H.P.; Hong, S.K. Nonlinear Control for Autonomous Trajectory Tracking while Considering Collision Avoidance of UAVs Based on Geometric Relations. Energies 2019, 12, 1551. [Google Scholar] [CrossRef]
- Tzafestas, S.G. Mobile Robot Control and Navigation: A Global Overview. J. Intell. Robot. Syst. 2018, 91, 35–58. [Google Scholar] [CrossRef]
- Thanh, H.L.N.N.; Hong, S.K. Completion of Collision Avoidance Control Algorithm for Multicopters Based on Geometrical Constraints. IEEE Access 2018, 6, 27111–27126. [Google Scholar] [CrossRef]
- Kanayama, Y.; Kimura, Y.; Miyazaki, F.; Noguchi, T. A stable tracking control method for an autonomous mobile robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Cincinnati, OH, USA, 13–18 May 1990; Volume 381, pp. 384–389. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value |
|---|---|---|
| Radius of the mobile robot | 0.2 m | |
| Radius of the obstacle | 0.1 m | |
| Detected distance of the sensor | 3.5 m | |
| Distance of activating the obstacle avoidance controller | 0.5 m | |
| Safe distance from the obstacle | 0.35 m | |
| Trajectory tracking control gains | 3, 12, 6 | |
| Obstacle avoidance control gains | 3, 6 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Sun, J.; Chen, G. A Multi-Switching Tracking Control Scheme for Autonomous Mobile Robot in Unknown Obstacle Environments. Electronics 2020, 9, 42. https://doi.org/10.3390/electronics9010042
Li J, Sun J, Chen G. A Multi-Switching Tracking Control Scheme for Autonomous Mobile Robot in Unknown Obstacle Environments. Electronics. 2020; 9(1):42. https://doi.org/10.3390/electronics9010042
Chicago/Turabian StyleLi, Jianhua, Jianfeng Sun, and Guolong Chen. 2020. "A Multi-Switching Tracking Control Scheme for Autonomous Mobile Robot in Unknown Obstacle Environments" Electronics 9, no. 1: 42. https://doi.org/10.3390/electronics9010042
APA StyleLi, J., Sun, J., & Chen, G. (2020). A Multi-Switching Tracking Control Scheme for Autonomous Mobile Robot in Unknown Obstacle Environments. Electronics, 9(1), 42. https://doi.org/10.3390/electronics9010042