Activities of Daily Living and Environment Recognition Using Mobile Devices: A Comparative Study


 , ,
, ,  ,
,  ,
, 

 and
and
Abstract
1. Introduction
2. Methods
2.1. Study Design
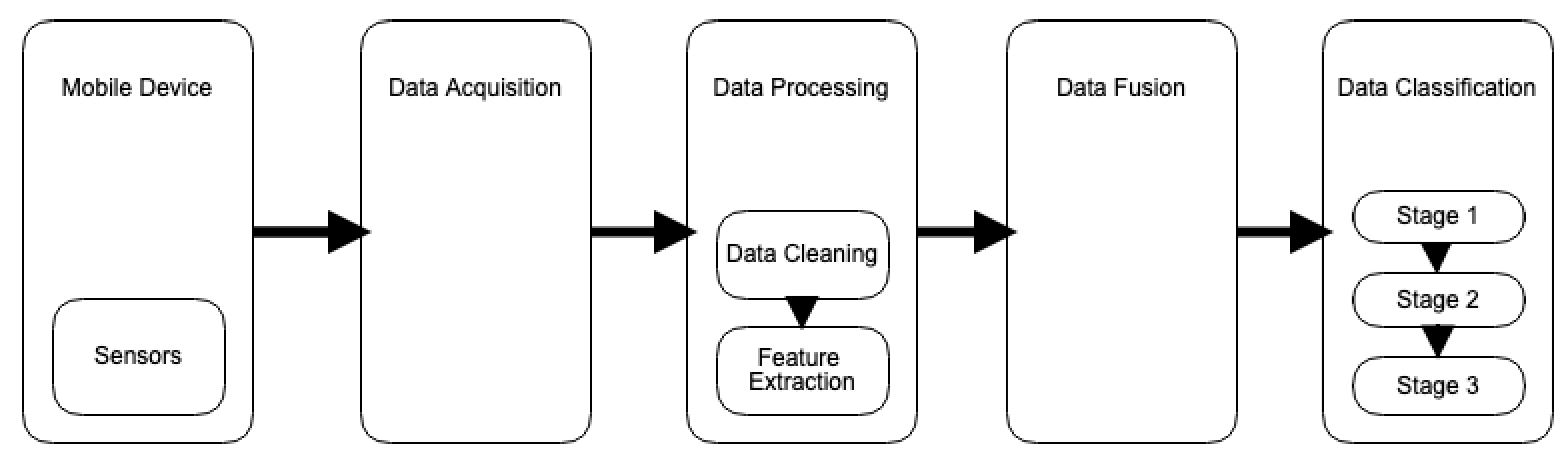
2.2. Overview of the Framework for the Recognition of the Activities of Daily Living and Environments
2.2.1. Data Acquisition
2.2.2. Data Cleaning
2.2.3. Feature Extraction
2.2.4. Data Fusion and Classification
3. Results
3.1. Recognition of Simple ADL
3.2. Recognition of Environments
3.3. Recognition of Activities without Motion
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mobile Marketing Statistics Compilation|Smart Insights. Smart Insights, 2019. Available online: https://www.smartinsights.com/mobile-marketing/mobile-marketing-analytics/mobile-marketing-statistics/ (accessed on 11 November 2019).
- Pires, I.; Garcia, N.; Pombo, N.; Flórez-Revuelta, F. From Data Acquisition to Data Fusion: A Comprehensive Review and a Roadmap for the Identification of Activities of Daily Living Using Mobile Devices. Sensors 2016, 16, 184. [Google Scholar] [CrossRef] [PubMed]
- Pires, I.M.; Garcia, N.M.; Pombo, N.; Flórez-Revuelta, F.; Rodríguez, N.D. Validation Techniques for Sensor Data in Mobile Health Applications. J. Sens. 2016, 2016, 1687–1725. [Google Scholar] [CrossRef]
- Shuib, L.; Shamshirb, S.; Ismail, M.H. A review of mobile pervasive learning: Applications and issues. Comput. Hum. Behav. 2015, 46, 239–244. [Google Scholar] [CrossRef]
- Garcia, N.M.; Rodrigues, J.J.P. (Eds.) Ambient Assisted Living; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Garcia, N.M. Roadmap to the Design of a Personal Digital Life Coach. In International Conference on ICT Innovations; Springer: Cham, Switzerland, 2015; pp. 21–27. [Google Scholar]
- Sousa, P.S.; Sabugueiro, D.; Felizardo, V.; Couto, R.; Pires, I.; Garcia, N.M. mHealth sensors and applications for personal aid. In Mobile Health; Springer: Cham, Switzerland, 2015; pp. 265–281. [Google Scholar]
- Dobre, C.; Mavromoustakis, C.X.; Garcia, N.M.; Mastorakis, G.; Goleva, R.I. Introduction to the AAL and ELE Systems. In Ambient Assisted Living and Enhanced Living Environments; Butterworth-Heinemann: Oxford, UK, 2017; pp. 1–16. [Google Scholar]
- Felizardo, V.; Sousa, P.; Sabugueiro, D.; Alexre, C.; Couto, R.; Garcia, N.; Pires, I. E-Health: Current status and future trends. In Handbook of Research on Democratic Strategies and Citizen-Centered E-Government Services; IGI Global: Hershey, PA, USA, 2015; pp. 302–326. [Google Scholar]
- Goleva, R.I.; Garcia, N.M.; Mavromoustakis, C.X.; Dobre, C.; Mastorakis, G.; Stainov, R.; Trajkovik, V. AAL and ELE Platform Architecture. In Ambient Assisted Living and Enhanced Living Environments; Butterworth-Heinemann: Oxford, UK, 2017; pp. 171–209. [Google Scholar]
- Banos, O.; Damas, M.; Pomares, H.; Rojas, I. On the use of sensor fusion to reduce the impact of rotational and additive noise in human activity recognition. Sensors 2012, 12, 8039–8054. [Google Scholar] [CrossRef]
- Akhoundi, M.A.A.; Valavi, E. Multi-Sensor Fuzzy Data Fusion Using Sensors with Different Characteristics. arXiv 2010, arXiv:1010.6096. [Google Scholar]
- Paul, P.; George, T. An Effective Approach for Human Activity Recognition on Smartphone. In Proceedings of the 2015 IEEE International Conference on Engineering and Technology (Icetech), Coimbatore, India, 25 January 2015; pp. 45–47. [Google Scholar] [CrossRef]
- Hsu, Y.-W.; Chen, K.-H.; Yang, J.-J.; Jaw, F.-S. Smartphone based fall detection algorithm using feature extraction. In Proceedings of the 2016 9th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Datong, China, 15 October 2016; pp. 1535–1540. [Google Scholar]
- Dernbach, S.; Das, B.; Krishnan, N.C.; Thomas, B.L.; Cook, D.J. Simple and Complex Activity Recognition through Smart Phones. In Proceedings of the 2012 8th International Conference on Intelligent Environments (IE), Guanajuato, Mexico, 14 January 2012; pp. 214–221. [Google Scholar]
- Shen, C.; Chen, Y.F.; Yang, G.S. On Motion-Sensor Behavior Analysis for Human-Activity Recognition via Smartphones. In Proceedings of the 2016 IEEE International Conference on Identity, Security and Behavior Analysis (Isba), Sendai, Japan, 22 January 2016; pp. 1–6. [Google Scholar]
- Pires, I.M.; Garcia, N.M.; Pombo, N.; Flórez-Revuelta, F. Identification of Activities of Daily Living Using Sensors Available in off-the-shelf Mobile Devices: Research and Hypothesis. In International Symposium on Ambient Intelligence; Springer: Cham, Switzerland, 2016; pp. 121–130. [Google Scholar]
- Pires, I.M.; Garcia, N.M.; Pombo, N.; Flórez-Revuelta, F.; Spinsante, S. Pattern recognition techniques for the identification of Activities of Daily Living using mobile device accelerometer. arXiv 2017, arXiv:1711.00096. [Google Scholar]
- Pires, I.M.; Garcia, N.M.; Pombo, N.; Flórez-Revuelta, F.; Spinsante, S.; Goleva, R.; Zdravevski, E. Recognition of activities of daily living based on environmental analyses using audio fingerprinting techniques: A systematic review. Sensors 2018, 18, 160. [Google Scholar] [CrossRef]
- Pires, I.M.; Garcia, N.M.; Pombo, N.; Flórez-Revuelta, F.; Spinsante, S. Approach for the development of a framework for the identification of activities of daily living using sensors in mobile devices. Sensors 2018, 18, 640. [Google Scholar] [CrossRef]
- Pires, I.M.; Garcia, N.M.; Pombo, N.; Flórez-Revuelta, F.; Spinsante, S.; Teixeira, M.C. Identification of activities of daily living through data fusion on motion and magnetic sensors embedded on mobile devices. In Pervasive and Mobile Computing; Elsevier: Amsterdam, The Netherlands, 2018; Volume 47, pp. 78–93. [Google Scholar]
- Pires, I.M.; Teixeira, M.C.; Pombo, N.; Garcia, N.M.; Flórez-Revuelta, F.; Spinsante, S.; Goleva, R.; Zdravevski, E. Android Library for Recognition of Activities of Daily Living: Implementation Considerations, Challenges, and Solutions. Open Bioinform. J. 2018. [Google Scholar] [CrossRef]
- Pires, I.M.; Garcia, N.M.; Pombo, N.; Flórez-Revuelta, F. Framework for the Recognition of Activities of Daily Living and their Environments in the Development of a Personal Digital Life Coach. DATA 2018. [Google Scholar] [CrossRef]
- Pires, I.M.S. Multi-Sensor Data Fusion in Mobile Devices for the Identification of Activities of Daily Living. Ph.D. Thesis, Universidade da Beira Interior, Covilhã, Portugal, November 2018. [Google Scholar]
- Pires, I.M.; Marques, G.; Garcia, N.M.; Pombo, N.; Flórez-Revuelta, F.; Spinsante, S.; Teixeira, M.C.; Zdravevski, E. Recognition of Activities of Daily Living and Environments Using Acoustic Sensors Embedded on Mobile Devices. Electronics 2019, 8, 1499. [Google Scholar] [CrossRef]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [PubMed]
- Costarelli, D.; Vinti, G. Pointwise and uniform approximation by multivariate neural network operators of the max-product type. Neural Netw. 2016, 81, 81–90. [Google Scholar] [CrossRef] [PubMed]
- Gripenberg, G. Approximation by neural networks with a bounded number of nodes at each level. J. Approx. Theory 2003, 122, 260–266. [Google Scholar] [CrossRef]
- Pires, I.M.; Garcia, N.M.; Pombo, N.; Flórez-Revuelta, F. Limitations of the Use of Mobile Devices and Smart Environments for the Monitoring of Ageing People. In Proceedings of the 4th International Conference on Information and Communication Technologies for Ageing Well and e-Health, Madeira, Portugal, 22–23 March 2018; pp. 269–275. [Google Scholar]
- Pires, I.; Felizardo, V.; Pombo, N.; Garcia, N.M. Limitations of energy expenditure calculation based on a mobile phone accelerometer. In Proceedings of the 2017 International Conference on High Performance Computing & Simulation (HPCS), Genoa, Italy, 17–21 July 2017. [Google Scholar]
- August 2017—Multi-Sensor Data Fusion in Mobile Devices for the Identification of Activities of Daily Living. Available online: https://github.com/impires/August_2017-_Multi-sensor_data_fusion_in_mobile_devices_for_the_identification_of_activities_of_dail (accessed on 20 February 2019).
- Yoav, F.; Schapire, R.E. A Decision-Theoretic Generalisation of on-Line Learning and an Application to Boosting. J. Comput. Syst. Sci. 1995, 55, 119. [Google Scholar]
- Hastie, T.; Rosset, S.; Zhu, J.; Zou, H. Multi-class AdaBoost, 2009. Stat. Interface 2008, 2, 349–360. [Google Scholar] [CrossRef]
- Pollettini, J.T.; Panico, S.R.; Daneluzzi, J.C.; Tinós, R.; Baranauskas, J.A.; Macedo, A.A. Using machine learning classifiers to assist healthcare-related decisions: Classification of electronic patient records. J. Med. Syst. 2012, 36, 3861–3874. [Google Scholar] [CrossRef]
- Frank, E.; Hall, M.; Reutemann, P.; Trigg, L. Weka 3—Data Mining with Open Source Machine Learning Software in Java, 2019. Available online: https://www.cs.waikato.ac.nz/ml/Weka/index.html (accessed on 10 November 2019).
- Github, Smile—Statistical Machine Intelligence and Learning Engine, 2019. Available online: http://haifengl.github.io/smile/ (accessed on 10 November 2019).
- Graizer, V. Effect of low-pass filtering and re-sampling on spectral and peak ground acceleration in strong-motion records. In Proceedings of the 15th World Conference of Earthquake Engineering, Lisbon, Portugal, 28 September 2012; pp. 24–28. [Google Scholar]
- Rader, C.; Brenner, N. A new principle for fast Fourier transformation. IEEE Trans. Acoust. Speech Signal Process. 1976, 24, 264–266. [Google Scholar] [CrossRef]
- Karlik, B.; Olgac, A.V. Performance analysis of various activation functions in generalized MLP architectures of neural networks. Int. J. Artif. Intell. Expert Syst. 2011, 1, 111–122. [Google Scholar]
- Kumar, S.K. On weight initialization in deep neural networks. arXiv 2017, arXiv:1704.08863. [Google Scholar]
- Van Laarhoven, T. L2 regularization versus batch and weight normalization. arXiv 2017, arXiv:1706.05350. [Google Scholar]
- Nene, S.A.; Nayar, S.K. A simple algorithm for nearest neighbor search in high dimensions. IEEE Trans. Pattern Anal. Mach. Intell. 1997, 19, 989–1003. [Google Scholar] [CrossRef]
- Kawaguchi, S.; Nishii, R. Hyperspectral image classification by bootstrap AdaBoost with random decision stumps. IEEE Trans. Geosci. Remote. Sens. 2007, 45, 3845–3851. [Google Scholar] [CrossRef]
- Safavian, S.R.; Lgrebe, D. A survey of decision tree classifier methodology. IEEE Trans. Syst. Man Cybern. 1991, 21, 660–674. [Google Scholar] [CrossRef]
- Nicholson, A.C. Deeplearning4j: Open-source, Distributed Deep Learning for the JVM, 2 Sepember 2017. Available online: https://deeplearning4j.org/ (accessed on 10 November 2019).


{kind=link}
| Sensor | Type of Data | Features |
|---|---|---|
| Accelerometer Magnetometer Gyroscope | Raw data | standard deviation, mean, maximum and minimum value, variance, and median |
| Peaks | five greatest distances between peaks, mean, standard deviation, variance, and median | |
| Microphone | Raw data | 26 MFCC, standard deviation, mean, maximum value, minimum value, variance, and median |
| GPS receiver | Raw data | distance travelled |
| Sensors | Correlation Coefficient | Mean Absolute Error | Root Mean Squared Error | Relative Absolute Error | Root Relative Squared Error | Accuracy |
|---|---|---|---|---|---|---|
| Accelerometer | 0.8335 | 0.261 | 0.817 | 21.8138% | 57.7675% | 73.9% |
| Accelerometer and Magnetometer | 0.8771 | 0.2076 | 0.7011 | 17.2911% | 49.5751% | 79.23% |
| Accelerometer, Magnetometer, and Gyroscope | 0.8781 | 0.2009 | 0.6991 | 16.733% | 49.4287% | 79.91% |
| ADL | Accelerometer | Accelerometer and Magnetometer | Accelerometer, Magnetometer, and Gyroscope |
|---|---|---|---|
| Going downstairs | 26.24% | 25.61% | 37.79% |
| Going upstairs | 31.73% | 32.64% | 32.91% |
| Running | 93.13% | 93.00% | 92.26% |
| Standing | 96.35% | 96.58% | 98.44% |
| Walking | 37.51% | 51.23% | 50.87% |
| ADL | Accelerometer | Accelerometer and Magnetometer | Accelerometer, Magnetometer and Gyroscope | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TN | FP | FN | TP | TN | FP | FN | TP | TN | FP | FN | TP | |
| Going downstairs | 7469 | 1061 | 531 | 939 | 7467 | 1073 | 533 | 927 | 7606 | 1017 | 394 | 983 |
| Going upstairs | 7075 | 630 | 925 | 1370 | 7379 | 967 | 621 | 1033 | 7627 | 1498 | 373 | 502 |
| Running | 7919 | 81 | 81 | 1919 | 7914 | 82 | 86 | 1918 | 7917 | 97 | 83 | 1903 |
| Standing | 7938 | 26 | 62 | 1974 | 7933 | 33 | 67 | 1967 | 7977 | 23 | 23 | 1977 |
| Walking | 7472 | 552 | 528 | 1448 | 7629 | 632 | 371 | 1368 | 7609 | 546 | 391 | 1454 |
| ADL | Accelerometer | Accelerometer and Magnetometer | Accelerometer, Magnetometer, and Gyroscope |
|---|---|---|---|
| Going downstairs | 83.79% | 84.21% | 86.07% |
| Going upstairs | 85.29% | 84.70% | 85.44% |
| Running | 98.49% | 98.47% | 98.43% |
| Standing | 99.04% | 99.01% | 99.55% |
| Walking | 86.90% | 89.53% | 91.13% |
| ADL | Accelerometer | Accelerometer and Magnetometer | Accelerometer, Magnetometer, and Gyroscope | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TP | TN | FP | FN | TP | TN | FP | FN | TP | TN | FP | FN | |
| Going downstairs | 1017 | 983 | 7362 | 638 | 972 | 1028 | 7449 | 551 | 974 | 1026 | 7633 | 367 |
| Going upstairs | 1086 | 914 | 7443 | 557 | 940 | 1060 | 7530 | 470 | 1083 | 917 | 7461 | 539 |
| Running | 1917 | 83 | 7932 | 68 | 1917 | 83 | 7930 | 70 | 1908 | 92 | 7935 | 65 |
| Standing | 1965 | 35 | 7939 | 61 | 1963 | 37 | 7938 | 62 | 1976 | 24 | 7979 | 21 |
| Walking | 1060 | 940 | 7620 | 380 | 1317 | 683 | 7636 | 364 | 1494 | 506 | 7619 | 381 |
| ADL | Accelerometer | Accelerometer and Magnetometer | Accelerometer, Magnetometer, and Gyroscope |
|---|---|---|---|
| Going downstairs | 66.70% | 67.95% | 77.25% |
| Going upstairs | 84.45% | 81.55% | 82.40% |
| Running | 95.45% | 95.70% | 95.85% |
| Standing | 99.25% | 99.20% | 99.35% |
| Walking | 86.10% | 88.05% | 90.09% |
| Sensors | Sound |
| Correlation coefficient | 0.8171 |
| Mean absolute error | 0.5857 |
| Root mean squared error | 1.5574 |
| Relative absolute error | 26.3488% |
| Root relative squared error | 60.3156% |
| Accuracy | 41.43% |
| Environments | AdaBoost with the Decision Stump | AdaBoost with the Decision Tree | DNN |
|---|---|---|---|
| Bar | 91.78% | 99.08% | 22.05% |
| Classroom | 20.67% | 88.74% | 37.95% |
| Gym | 10.36% | 88.87% | 87.85% |
| Hall | 40.36% | 92.38% | 34.80% |
| Kitchen | 16.11% | 88.89% | 51.35% |
| Library | 34.01% | 91.59% | 19.90% |
| Street | 38.38% | 90.92% | 25.35% |
| Bedroom | 17.88% | 88.88% | 98.60% |
| Living room | 18.82% | 89.20% | 33.50% |
| ADL | Sound | |||
|---|---|---|---|---|
| TN | FP | FN | TP | |
| Bar | 15,961 | 146 | 39 | 1854 |
| Library | 15,791 | 1183 | 209 | 817 |
| Hall | 15,119 | 645 | 881 | 1355 |
| Kitchen | 16,000 | 1999 | 0 | 1 |
| Bedroom | 16,000 | 1999 | 0 | 1 |
| Street | 15,517 | 1180 | 483 | 820 |
| Classroom | 16,000 | 1999 | 0 | 1 |
| Living room | 16,000 | 1999 | 0 | 1 |
| Gym | 16,000 | 1999 | 0 | 1 |
| ADL | Sound | |||
|---|---|---|---|---|
| TP | FP | TN | FN | |
| Bar | 1917 | 83 | 15,918 | 82 |
| Library | 720 | 1280 | 15,767 | 233 |
| Hall | 1419 | 581 | 15,210 | 790 |
| Kitchen | 1 | 1999 | 16,000 | 0 |
| Bedroom | 14 | 1986 | 15,984 | 16 |
| Street | 787 | 1213 | 15,579 | 421 |
| Classroom | 148 | 1852 | 15,825 | 175 |
| Living room | 168 | 1832 | 15,888 | 112 |
| Gym | 1 | 1999 | 15,995 | 5 |
| Sensors | Correlation Coefficient | Mean Absolute Error | Root Mean Squared Error | Relative Absolute Error | Root Relative Squared Error | Accuracy |
|---|---|---|---|---|---|---|
| Accelerometer and environment | 1 | 0 | 0 | 0 | 0 | 100% |
| Accelerometer, Magnetometer, and Environment | 1 | 0 | 0 | 0 | 0 | 100% |
| Accelerometer, Magnetometer, Gyroscope, and Environment | 1 | 0 | 0 | 0 | 0 | 100% |
| Accelerometer, Distance, and Environment | 0.9969 | 0.0042 | 0.0645 | 0.6235% | 7.903% | 99.58% |
| Accelerometer, Magnetometer, Distance, and Environment | 0.9964 | 0.0045 | 0.0695 | 0.6734% | 8.5118% | 99.55% |
| Accelerometer, Magnetometer, Gyroscope, Distance, and Environment | 0.9943 | 0.0073 | 0.0876 | 1.0974% | 10.7201% | 99.27% |
| Accelerometer and Environment | Accelerometer, Magnetometer, and Environment | Accelerometer, Magnetometer, Gyroscope, and Environment | |
|---|---|---|---|
| Watching television | 100% | 100% | 100% |
| Sleeping | 100% | 100% | 100% |
| Accelerometer, Distance, and Environment | Accelerometer, Magnetometer, Distance, and Environment | Accelerometer, Magnetometer, Gyroscope, Distance, and Environment | |
|---|---|---|---|
| Watching television | 98.58% | 98.98% | 98.98% |
| Driving | 100% | 100% | 100% |
| Sleeping | 98.32% | 98.32% | 98.32% |
| ADL | Accelerometer and Environment | Accelerometer, Magnetometer, and Environment | Accelerometer, Magnetometer, Gyroscope, and Environment | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TN | FP | FN | TP | TN | FP | FN | TP | TN | FP | FN | TP | |
| Watching television | 2000 | 0 | 0 | 2000 | 2000 | 0 | 0 | 2000 | 2000 | 0 | 0 | 2000 |
| Sleeping | 2000 | 0 | 0 | 2000 | 2000 | 0 | 0 | 2000 | 2000 | 0 | 0 | 2000 |
| ADL | Accelerometer, Distance, and Environment | Accelerometer, Magnetometer, Distance, and Environment | Accelerometer, Magnetometer, Gyroscope, Distance, and Environment | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TN | FP | FN | TP | TN | FP | FN | TP | TN | FP | FN | TP | |
| Watching television | 3979 | 0 | 21 | 2000 | 3998 | 13 | 2 | 1987 | 3998 | 13 | 2 | 1987 |
| Driving | 4000 | 1 | 0 | 1999 | 4000 | 1 | 0 | 1999 | 4000 | 1 | 0 | 1999 |
| Sleeping | 3974 | 0 | 26 | 2000 | 3974 | 0 | 26 | 2000 | 3974 | 0 | 26 | 2000 |
| Accelerometer and Environment | Accelerometer, Magnetometer, and Environment | Accelerometer, Magnetometer, Gyroscope, and Environment | |
|---|---|---|---|
| Watching television | 100% | 100% | 100% |
| Sleeping | 100% | 100% | 100% |
| Accelerometer, Distance, and Environment | Accelerometer, Magnetometer, Distance, and Environment | Accelerometer, Magnetometer, Gyroscope, Distance, and Environment | |
|---|---|---|---|
| Watching television | 99.67% | 99.97% | 99.97% |
| Driving | 99.98% | 99.98% | 99.98% |
| Sleeping | 99.52% | 99.52% | 99.50% |
| ADL | Accelerometer and Environment | Accelerometer, Magnetometer, and Environment | Accelerometer, Magnetometer, Gyroscope, and Environment | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TP | FP | TN | FN | TP | FP | TN | FN | TP | FP | TN | FN | |
| Watching television | 2000 | 0 | 2000 | 0 | 2000 | 0 | 2000 | 0 | 2000 | 0 | 2000 | 0 |
| Sleeping | 2000 | 0 | 2000 | 0 | 2000 | 0 | 2000 | 0 | 2000 | 0 | 2000 | 0 |
| ADL | Accelerometer, Distance, and Environment | Accelerometer, Magnetometer, Distance, and Environment | Accelerometer, Magnetometer, Gyroscope, Distance, and Environment | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TP | FP | TN | FN | TP | FP | TN | FN | TP | FP | TN | FN | |
| Watching television | 2000 | 0 | 3980 | 20 | 2000 | 0 | 3998 | 2 | 2000 | 0 | 3998 | 2 |
| Driving | 1999 | 1 | 4000 | 0 | 1999 | 1 | 4000 | 0 | 1999 | 1 | 4000 | 0 |
| Sleeping | 1998 | 2 | 3973 | 27 | 1998 | 2 | 3973 | 27 | 1998 | 2 | 3972 | 28 |
| Accelerometer and Environment | Accelerometer, Magnetometer, and Environment | Accelerometer, Magnetometer, Gyroscope, and Environment | |
|---|---|---|---|
| Watching television | 94.05% | 94.00% | 94.15% |
| Sleeping | 97.90% | 97.85% | 98.00% |
| Accelerometer, Distance, and Environment | Accelerometer, Magnetometer, Distance, and Environment | Accelerometer, Magnetometer, Gyroscope, Distance, and Environment | |
|---|---|---|---|
| Watching television | 94.15% | 94.25% | 94.35% |
| Driving | 80.65% | 79.55% | 84.15% |
| Sleeping | 98.50% | 98.30% | 98.15% |
| Stages | DNN | IBk | AdaBoost with the Decision Stump | AdaBoost with the Decision Tree |
|---|---|---|---|---|
| Stage 1 | 87.29% | 77.68% | 59.75% | 91.33% |
| Stage 2 | 45.71% | 41.43% | 32.04% | 90.95% |
| Stage 3 | 99.87% | 99.73% | 92.83% | 99.87% |
| Overall | 77.62% | 72.95% | 61.54% | 94.05% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ferreira, J.M.; Pires, I.M.; Marques, G.; García, N.M.; Zdravevski, E.; Lameski, P.; Flórez-Revuelta, F.; Spinsante, S.; Xu, L. Activities of Daily Living and Environment Recognition Using Mobile Devices: A Comparative Study. Electronics 2020, 9, 180. https://doi.org/10.3390/electronics9010180
Ferreira JM, Pires IM, Marques G, García NM, Zdravevski E, Lameski P, Flórez-Revuelta F, Spinsante S, Xu L. Activities of Daily Living and Environment Recognition Using Mobile Devices: A Comparative Study. Electronics. 2020; 9(1):180. https://doi.org/10.3390/electronics9010180
Chicago/Turabian StyleFerreira, José M., Ivan Miguel Pires, Gonçalo Marques, Nuno M. García, Eftim Zdravevski, Petre Lameski, Francisco Flórez-Revuelta, Susanna Spinsante, and Lina Xu. 2020. "Activities of Daily Living and Environment Recognition Using Mobile Devices: A Comparative Study" Electronics 9, no. 1: 180. https://doi.org/10.3390/electronics9010180
APA StyleFerreira, J. M., Pires, I. M., Marques, G., García, N. M., Zdravevski, E., Lameski, P., Flórez-Revuelta, F., Spinsante, S., & Xu, L. (2020). Activities of Daily Living and Environment Recognition Using Mobile Devices: A Comparative Study. Electronics, 9(1), 180. https://doi.org/10.3390/electronics9010180