SINDVis: User-Centered Dynamic Interactive Visualization System for Space Information Networks


Abstract
1. Introduction
2. Related Work
2.1. SIN Concept and Architecture
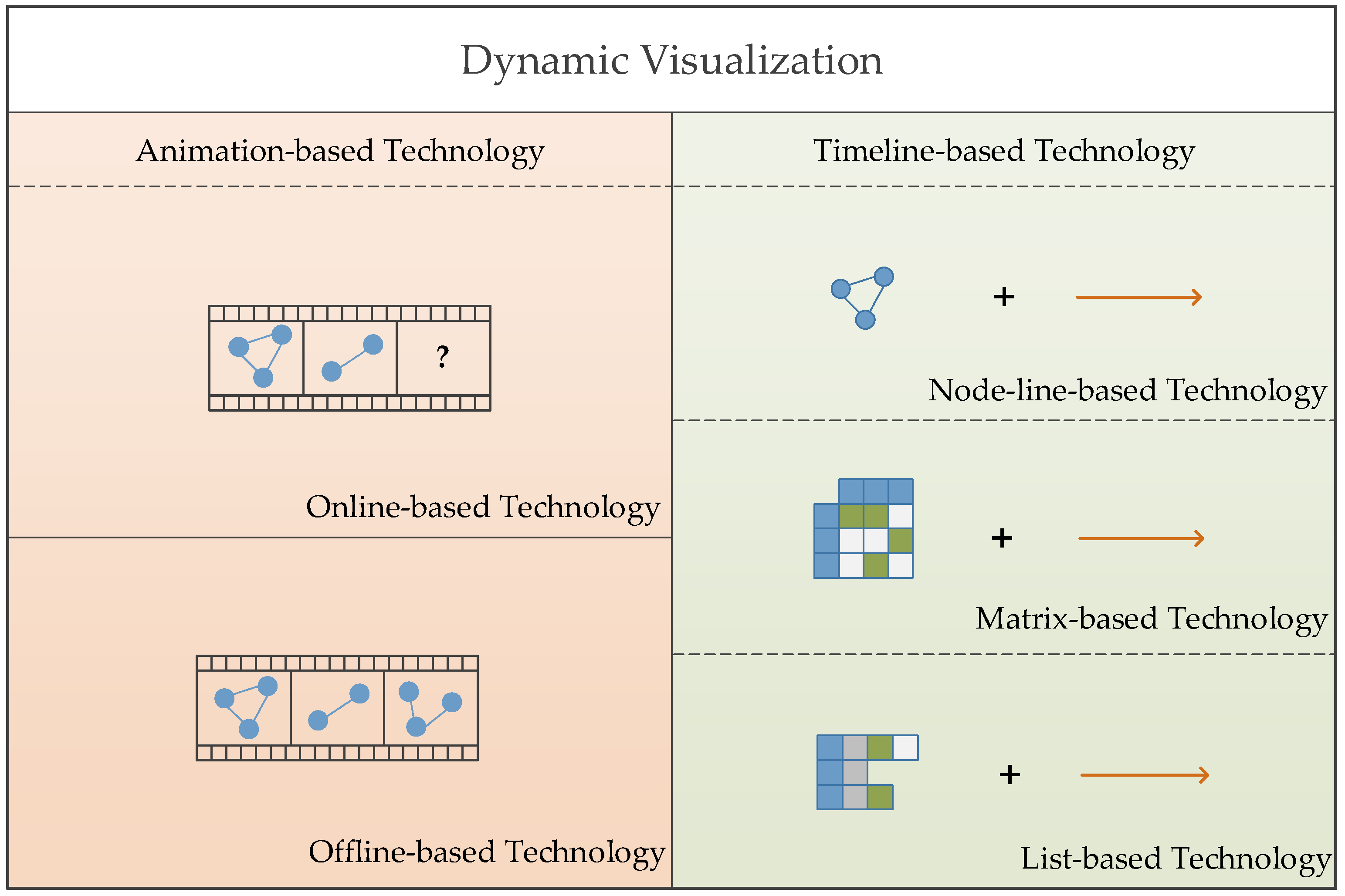
2.2. Dynamic Visualization and Visual Analysis
2.3. User Feature Analysis
- USE-1: (Understanding Class Users). The first-class users are new to SIN, and they do not have much relevant background knowledge of SIN. Meanwhile, they need to have preliminary understanding of the composition and structure of SIN with the SINDVis.
- USE-2: (Construction and Development Class Users). The second-class users come from the demonstration and construction departments of SIN, and they have a certain understanding of SIN. However, they need to optimize and improve SIN. Therefore, they not only need to grasp the architecture of SIN in real-time, but also need to understand the evolvement laws and development situation of SIN with the SINDVis.
- USE-3: (Maintenance and Management Class Users). The third class users come from the maintenance and management departments of SIN, and they need to grasp the structure and change laws of SIN in real time. Meanwhile, they should grasp the position and relationship of key nodes and core links of SIN in the topology domain and effectively avoid the damage and interference of SIN. In addition, they can effectively maintain the normal operation of the SIN with the SINDVis.
3. Theory and Methods
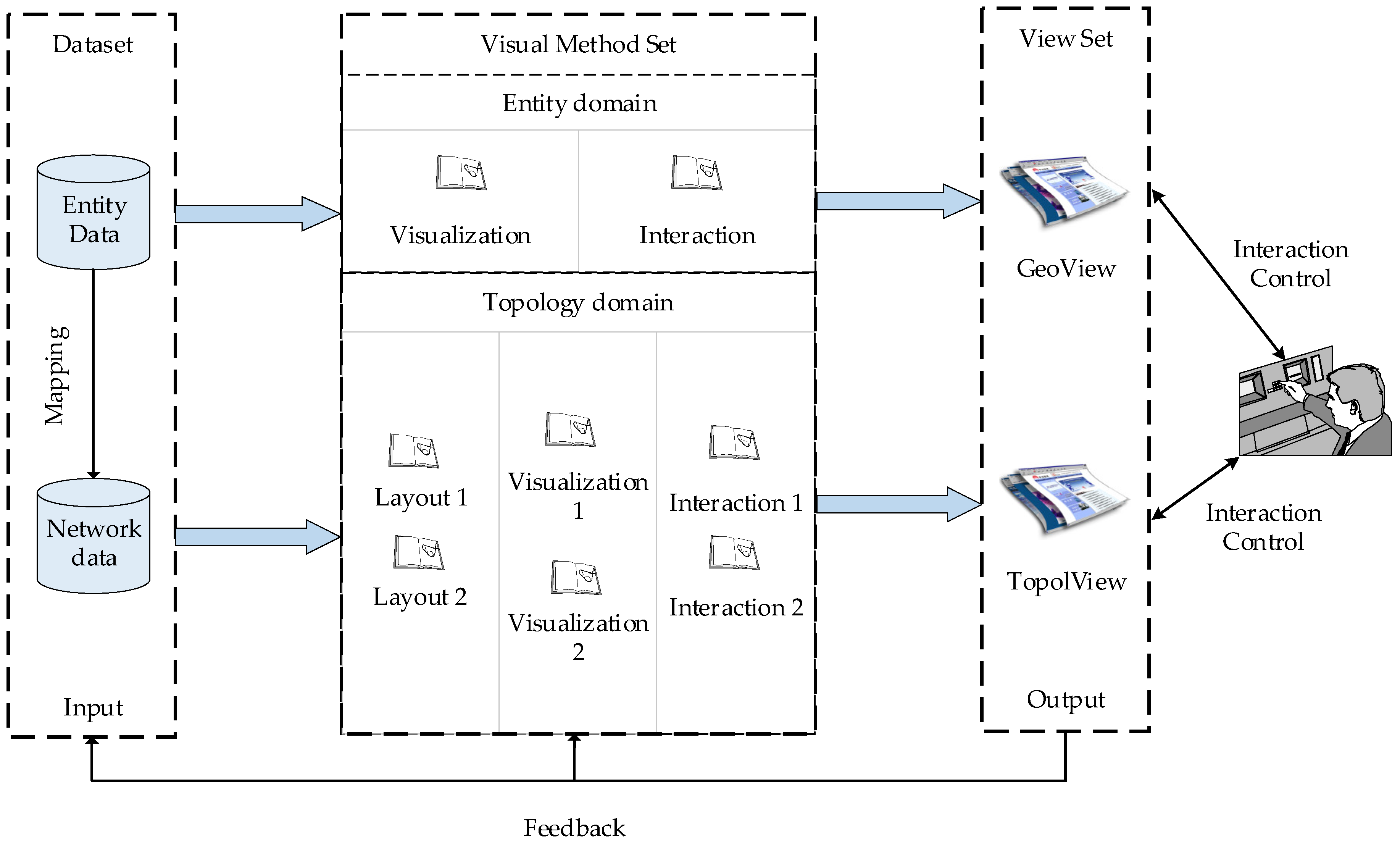
3.1. SINDVis Architecture
- Dataset: The dataset is an input module for SINDVis, consisting of an entity dataset and a network dataset, and the network data in topology domain is mapped from the entity data in the entity domain. The entity dataset consists of space data, such as satellite orbital parameters, satellite operating satellite cycles, satellite coverage, data transfer between satellites, etc. By mapping space entities to nodes and by mapping relationships between entities as edges, we formed the network dataset. Both of the above provide input to the SINDVis.
- Visual method set: The visual method set is a core-processing module of SINDVis and it includes the entity domain methods and topology domain methods. For the entity domain, we refer to the visual views of STK and SaVi and realize the dynamic display of the structure and running state of the SIN in the entity domain. For the topology domain, we realize the dynamic display of evolution laws of the SIN topology structure. The visual method set is a large collection of methods, and the essence of the visual method set is a black box. The implementation methods of the entity domain mainly include visualization and interaction methods. The implementation methods of the topology domain mainly include layout, visualization and interaction methods. Because of the different principles and different objects of the entity domain and topology domain, the implementation methods of each are also different.
- View set: The view set is the output module of the SINDVis, including the entity domain view, named GeoView, and the topology domain view, named TopolView. As we know, the visual view is a direct embodiment of the implementation of visualization technologies, and it is also a medium for showing information and implementing user interactions. Meanwhile, we think of the visual method set as processing, and the view set as results. Therefore, we constructed the visual method set and the view set separately. In SINDVis, the GeoView and TopolView appear on different pages at the same time. Of course, the specific display forms of the GeoView and TopolView depend on the specific visual methods selected. Meanwhile, the view set can feed the user’s new requirements into the input module and the core-processing module, thus generating output modules that meet users’ new requirements.
- Users: Users are the center of the SINDVis, and users’ requirements are the basis reference for SINDVis function settings. Visual interaction is built between the view set and users. Meanwhile, the users enable real-time interaction with the view, and the users can control the views in real-time. Because the SINDVis is a dynamic visualization system, the main interaction is the time control of users. In addition, due to the limitations of page size, users can zoom in, zoom out, or pan the views according to their own interests. It is also one of the main visual interactive functions of the SINDVis.
3.2. SINDVis Description of Functions
3.2.1. Descriptions of GeoView Functions
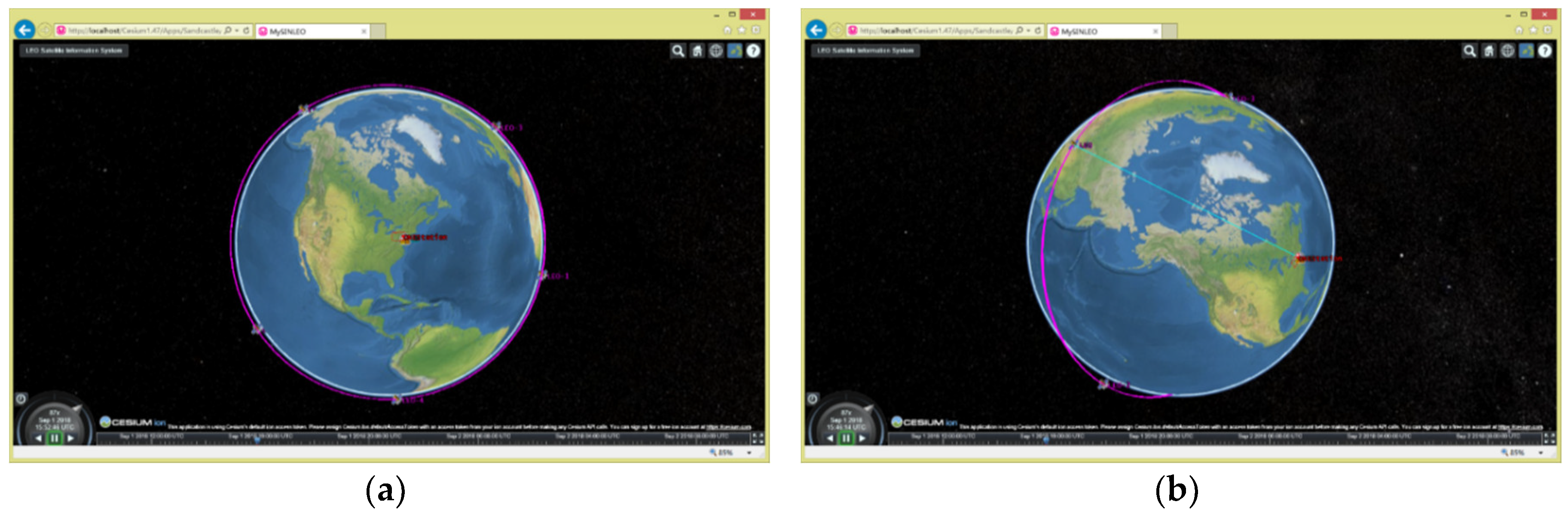
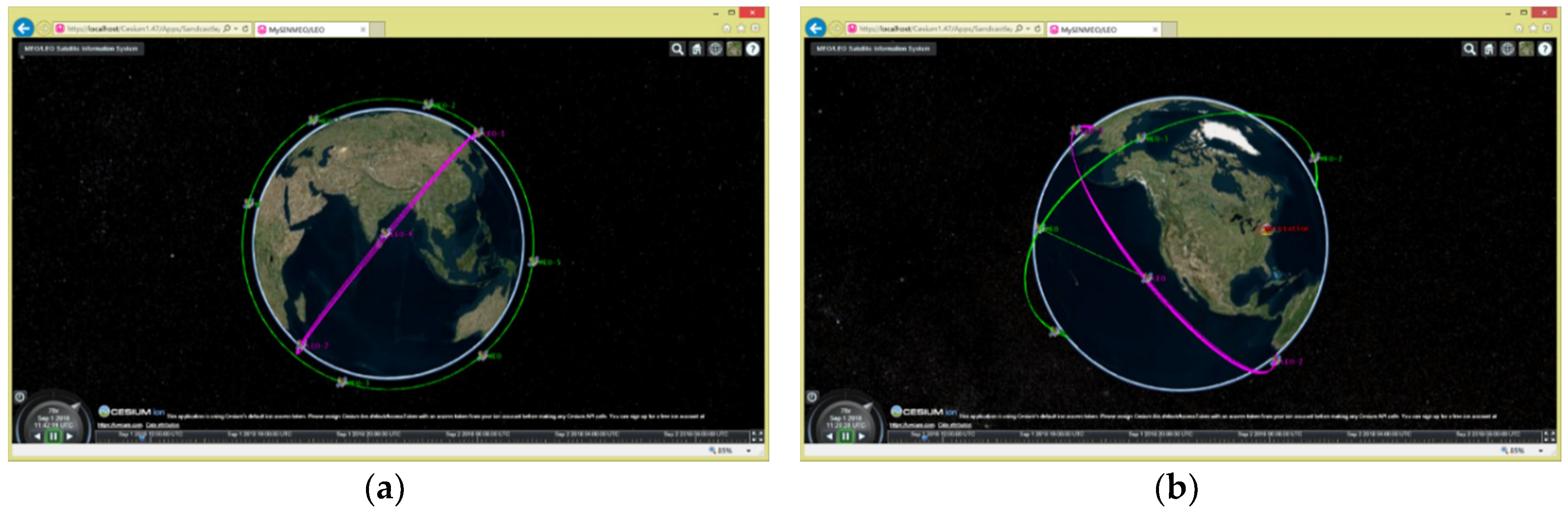
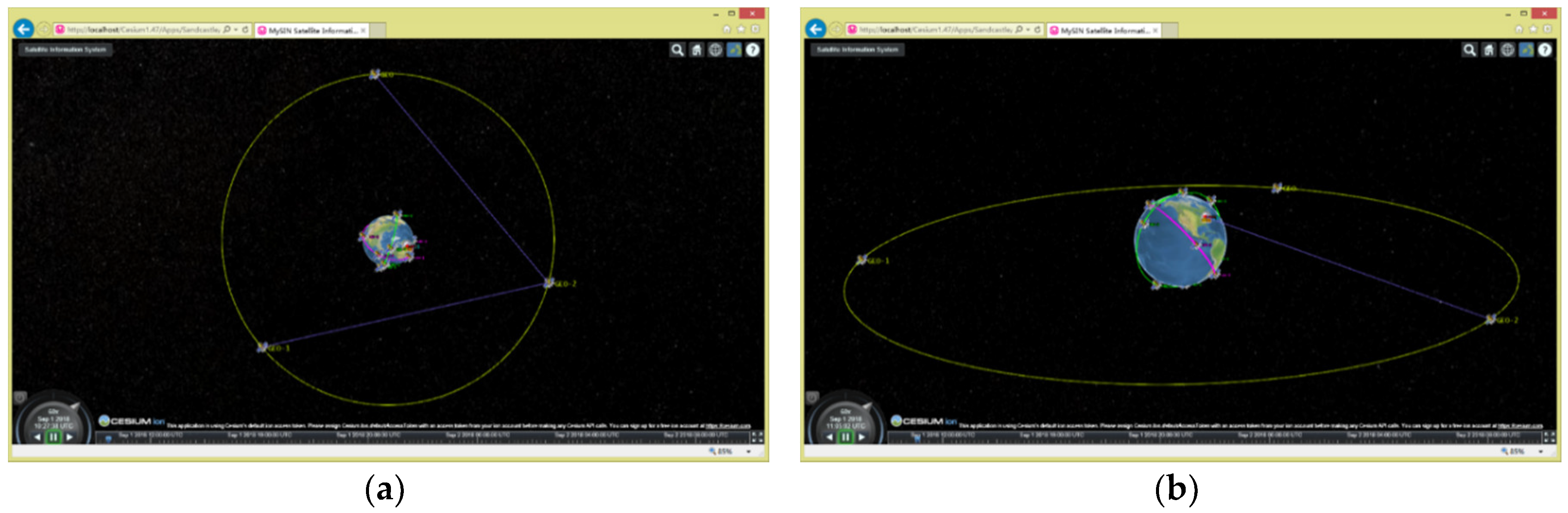
- Function 1: GeoView can realistically simulate and demonstrate the composition and operational status of SIN, and it can achieve a stereoscopic display (3D) and planar display (2D). Meanwhile, the view also can display the relevant geospatial environment.
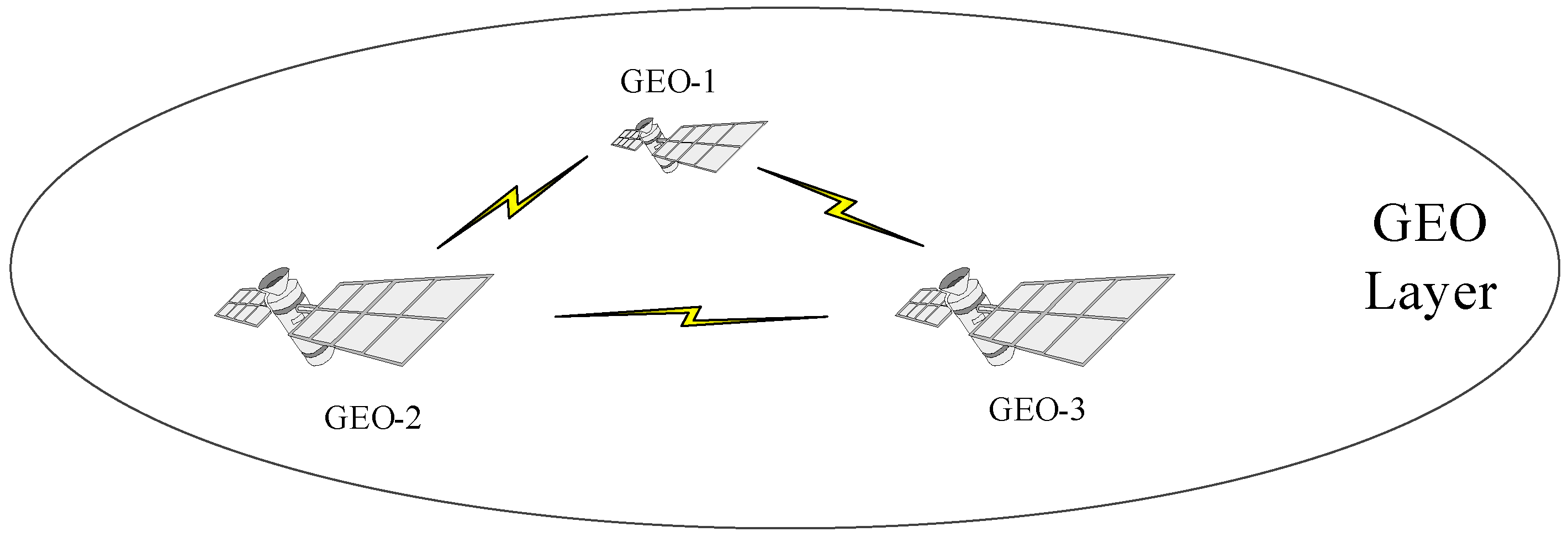
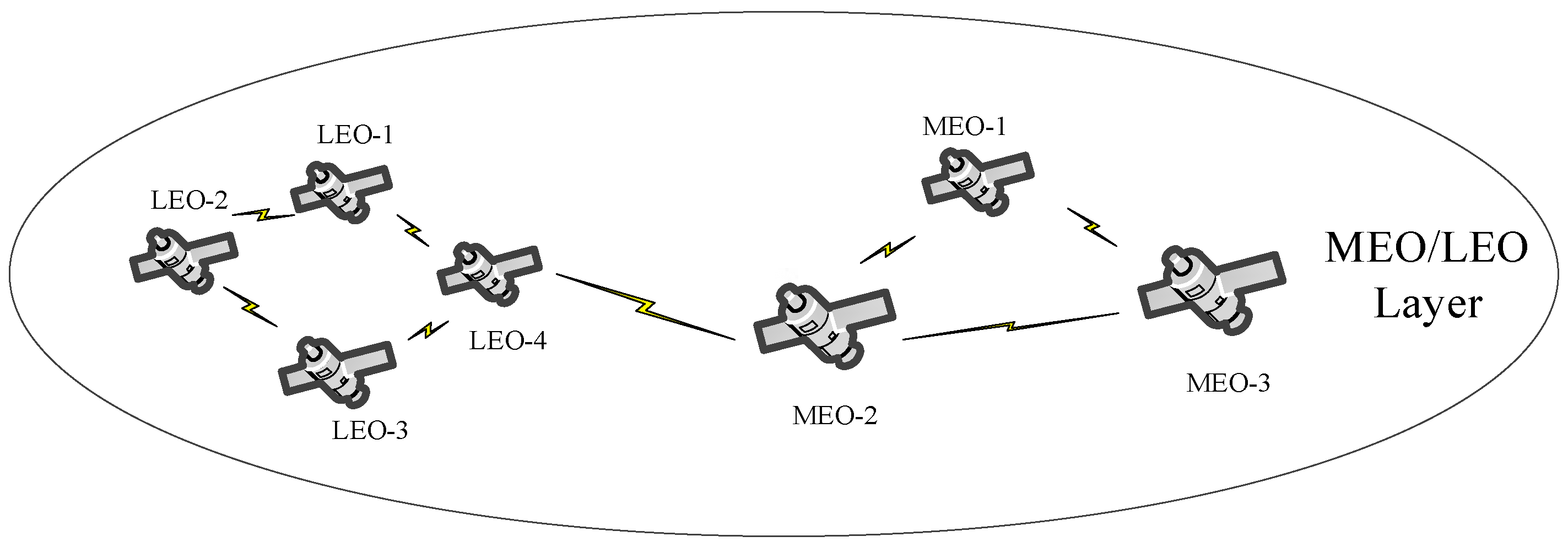
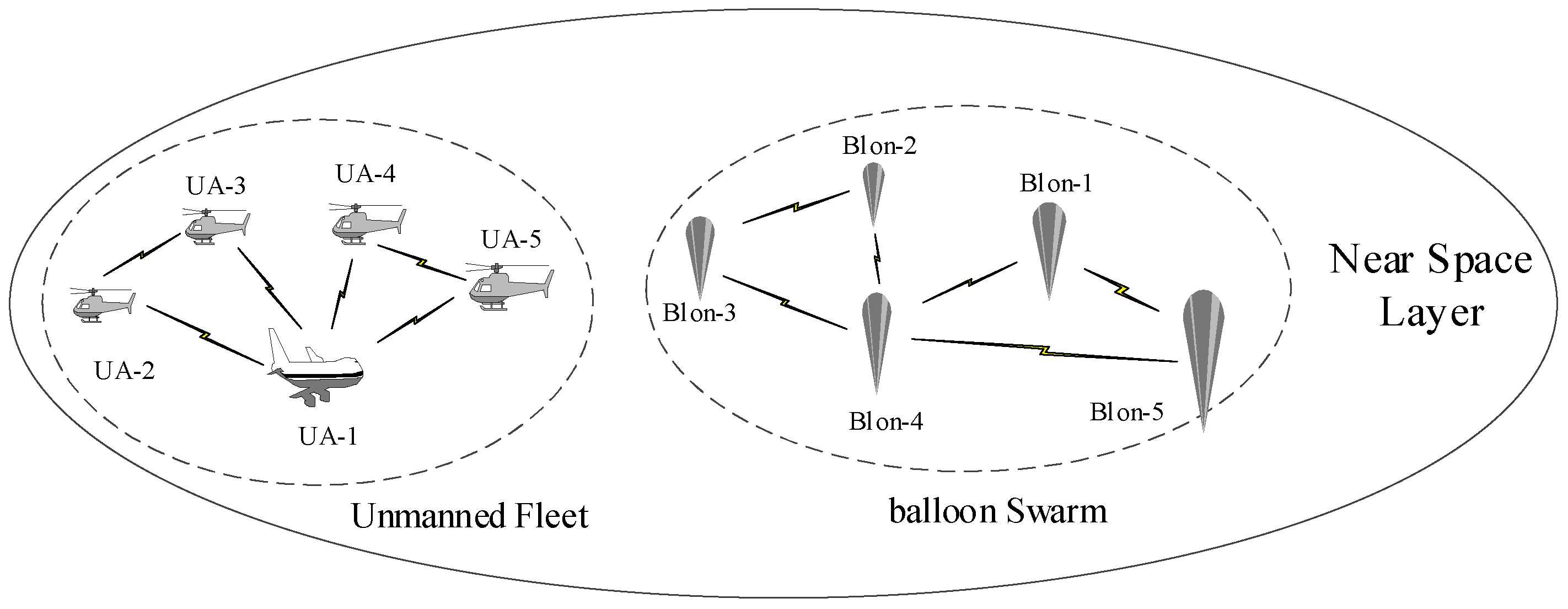
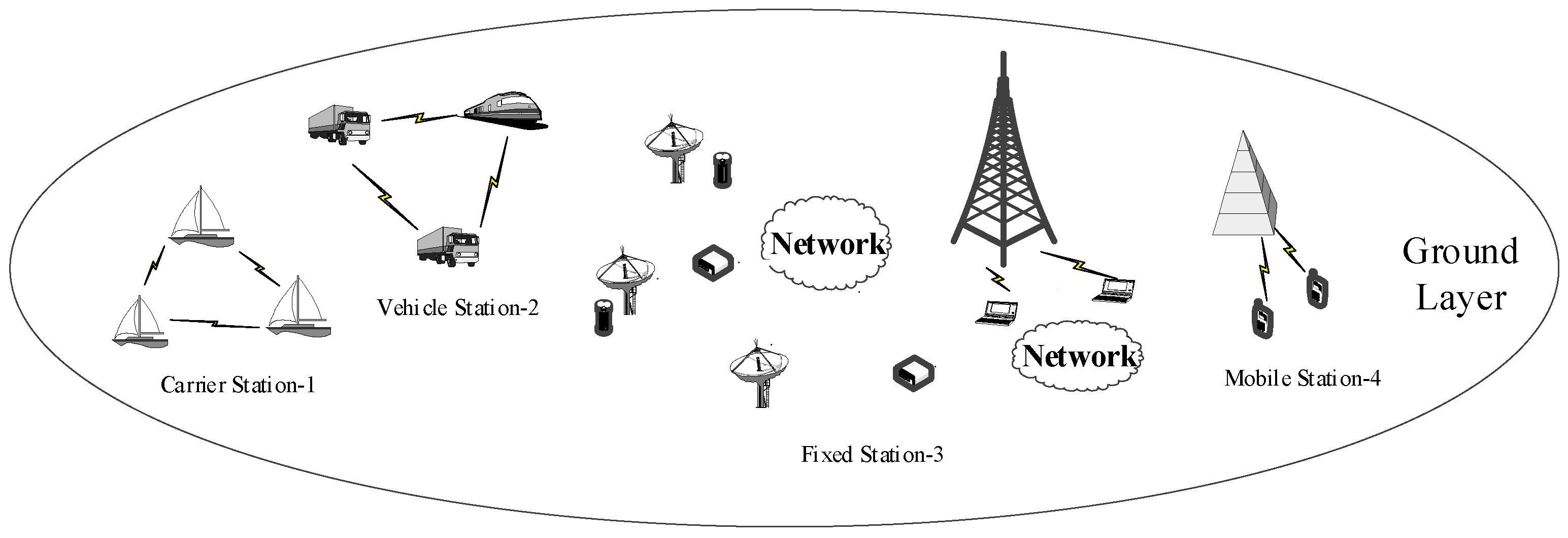
- Function 2: GeoView can show the specific network structure and connection relations of the GEO layer satellite system and the MEO/LEO layer satellite system. It can show the orbit and coverage of the satellite systems. In addition, GeoView can display the group style, running mode, and coverage range of unmanned aircrafts (UAs) and the hot air balloons (HABs) in the Near Space layer information system. Meanwhile, it can also show the specific locations of Ground layer terminals and their connections with other information systems.
- Function 3: GeoView can determine the parameters of visual elements by setting a hot zone, and demonstrating the dynamic transmission of data information among different links.
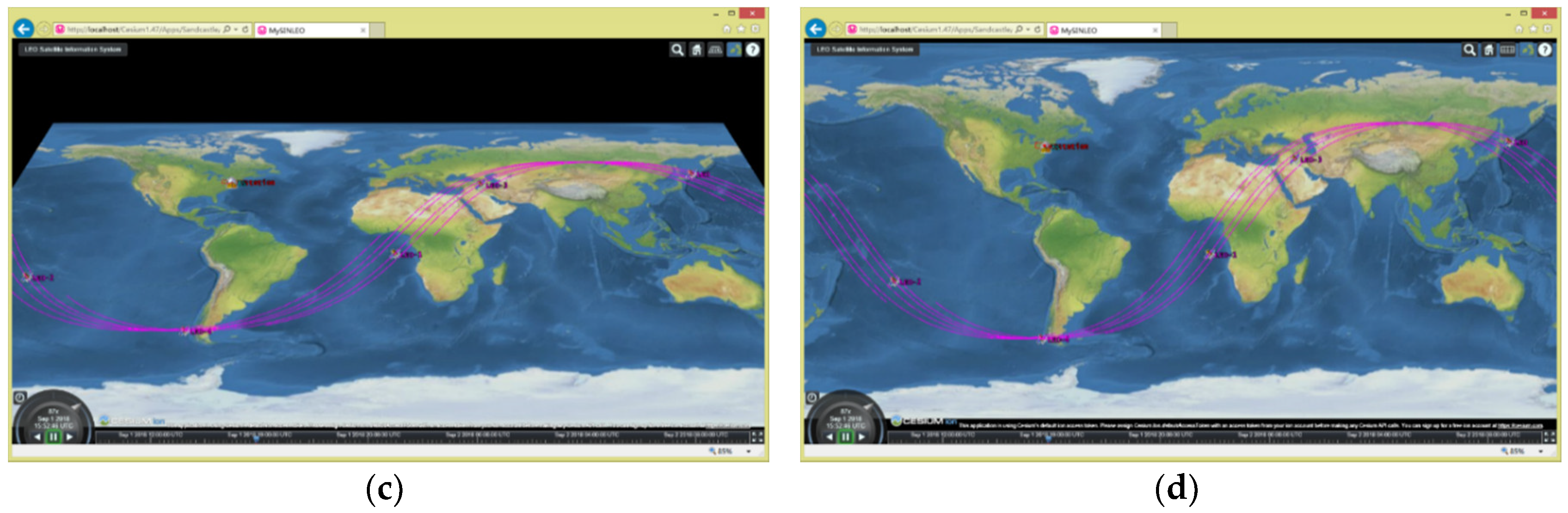
- Function 4: GeoView can enable freely switching of 3D, 2.5D, and 2D information, and it can also switch multiple map backgrounds and operating environments. Meanwhile, it can realize the real-time synchronization of data information. Users can zoom in and zoom out of the views freely based on individual needs. This means that the overall view information can be displayed as well as the detailed view information, and the whole process will not cause the distortion of the view.
3.2.2. Descriptions of TopolView Functions
- Function 1: TopolView should show the complete topology structure of the SIN and realize the network expansion display of the four-layer structure. It should show the tight coupling relationships within the layers and the loosely coupled connections between the layers.
- Function 2: TopolView should show the network features, such as the key nodes and important links of SIN, on the same page. The key nodes and important links are the core of the whole network, and they are the cornerstone of normal operation of SIN. Therefore, it is important for all people involved in the construction, development, maintenance, and management of SIN to master this information.
- Function 3: TopolView should show the dynamic evolution laws of SIN. Under the guidance of topology evolution rules, including node increment, node deletion, link increment, and link deletion, it is possible to display the vibrations and changes in the network topology. Which are caused by the changes in nodes and edges in SIN. Within a certain time by the sliding of the time slice, it will keep a new stable state.
- Function 4: TopolView should assist in the optimization of SIN through the cleanup of network topology-independent nodes and unrelated links, including the deletion of unimportant nodes and unrelated links. It should also optimize the SIN structure scale and reduce duplication in construction.
3.2.3. Description of the Fusion Usage of Views
3.3. GeoView Methods
3.4. TopolView Methods
3.4.1. FDA Layout
- Step 1: Calculation of the repulsion forces between vertices and determination of the displacement vector (disp1) according to the repulsion forces.
- Step 2: Calculation of the attraction and final displacement vector (disp2) according to the gravitational and displacement vector (disp1).
- Step 3: Use of the cooling function to limit the range of motion of the vertex.
3.4.2. FAT Visualization
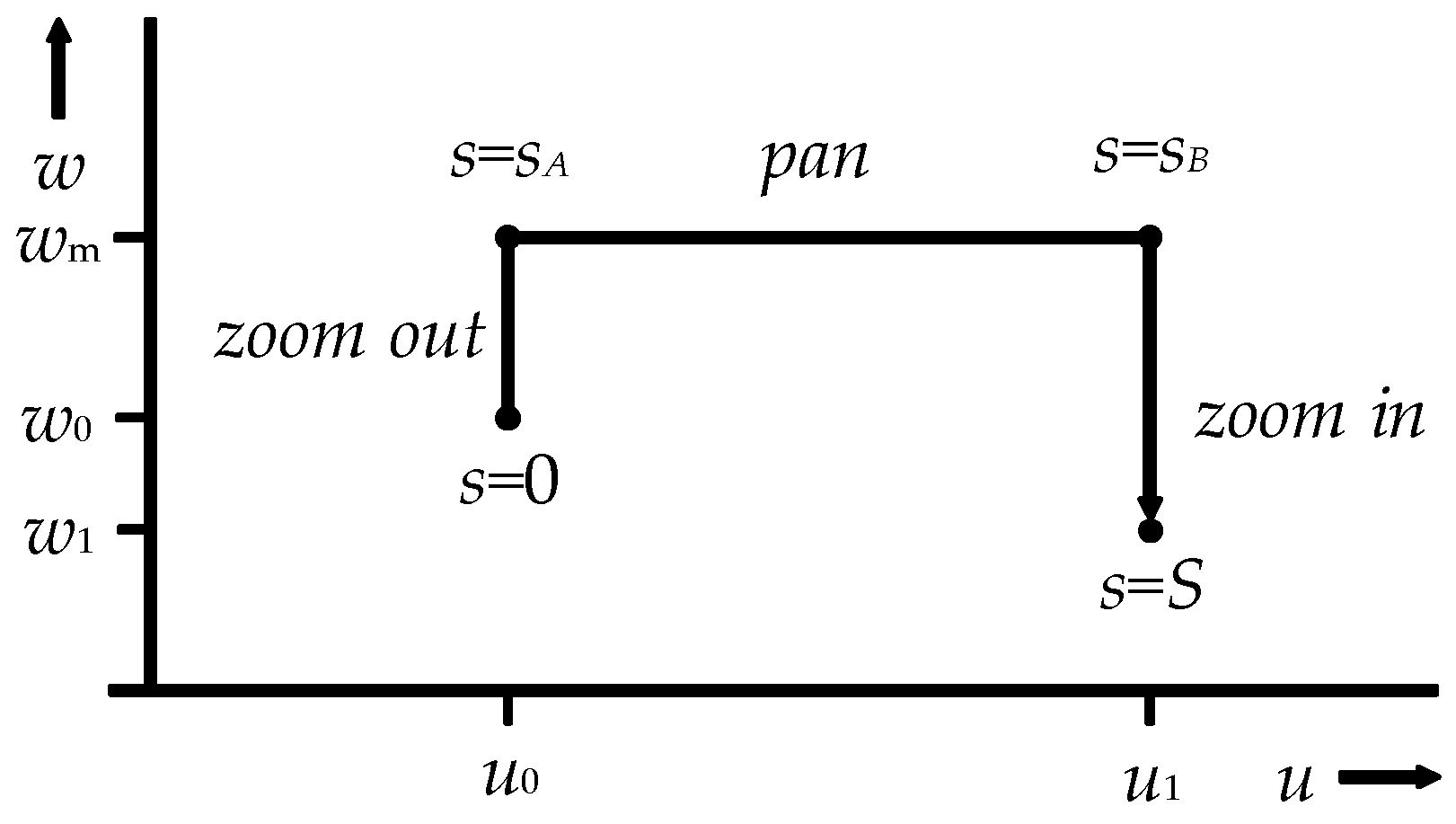
3.4.3. P&Z Interaction
4. Results
4.1. GeoView Implementation
4.1.1. Experimental Platform and Operating Environment
- Operating system: Windows 8.1 Professional edition_x64;
- Processor: Intel (R) Core (TM) i7-4790 CPU@3.60 GHz;
- Memory (RAM): 8 GB;
- Graphics: NVIDIA GeForce GTX 745;
- Local server: wampserver3.0.6_x64;
- Browser: Internet Explorer, Avast Secure Browser, Google Chrome;
- Development tools: Brackets, Atom, Adobe Dreamweaver CS6, Eclipse, Cesium.js.
4.1.2. GeoView Function Implementation
4.2. TopolView Implementation
4.2.1. Experimental Platform and Operating Environment
- Operating system: Windows 8.1 Professional edition_x64;
- Processor: Intel (R) Core (TM) i7-4790 CPU@3.60 GHz;
- Memory (RAM): 8 GB;
- Graphics: NVIDIA GeForce GTX 745;
- Local server: wampserver3.0.6_x64;
- Browser: Internet Explorer, Avast Secure Browser, Google Chrome;
- Development tools: Brackets, Atom, Adobe Dreamweaver CS6, Eclipse, D3.js, Vis.js, Echarts.js, Cytoscape.js.
4.2.2. TopolView Function Implementation
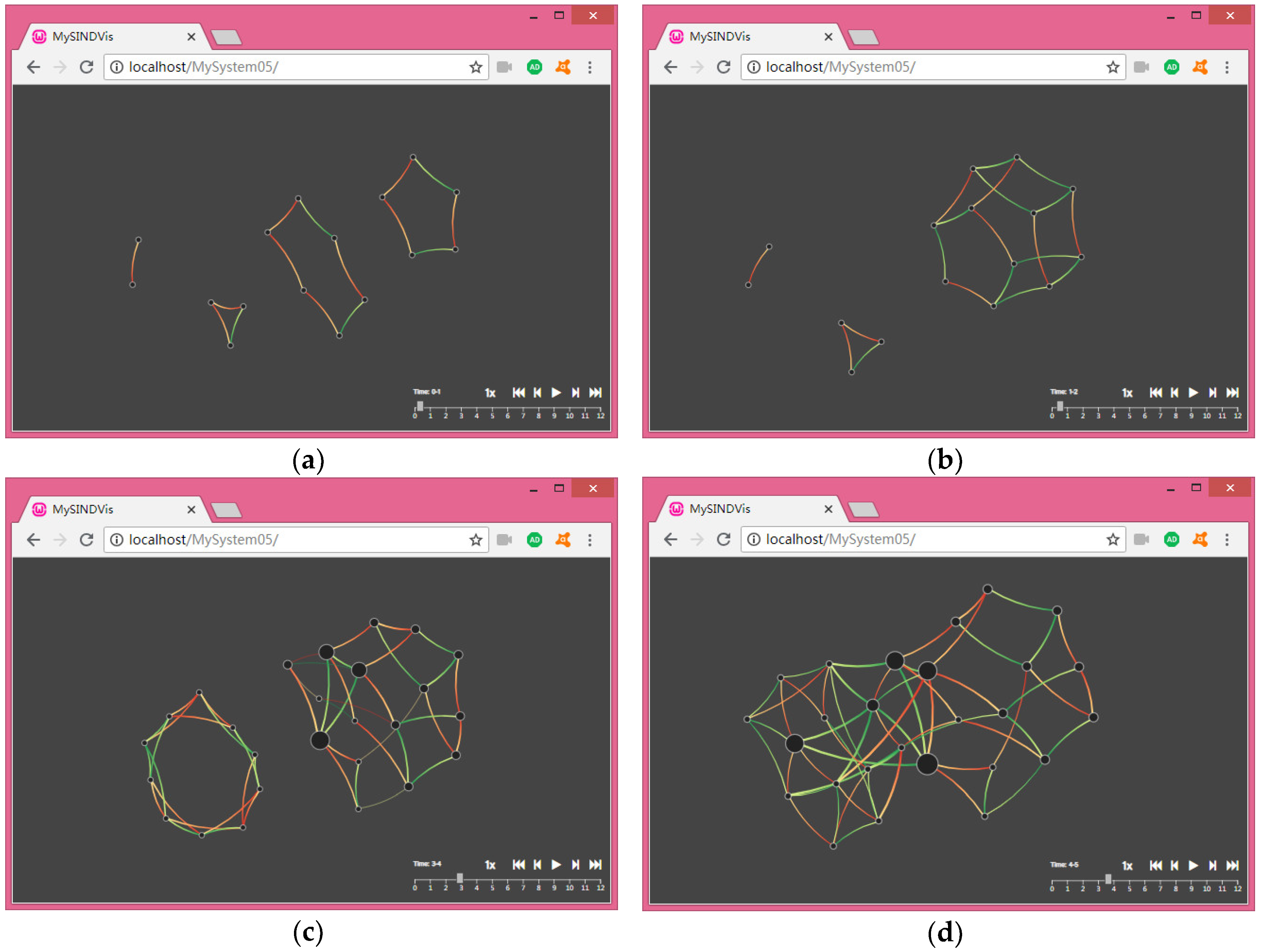
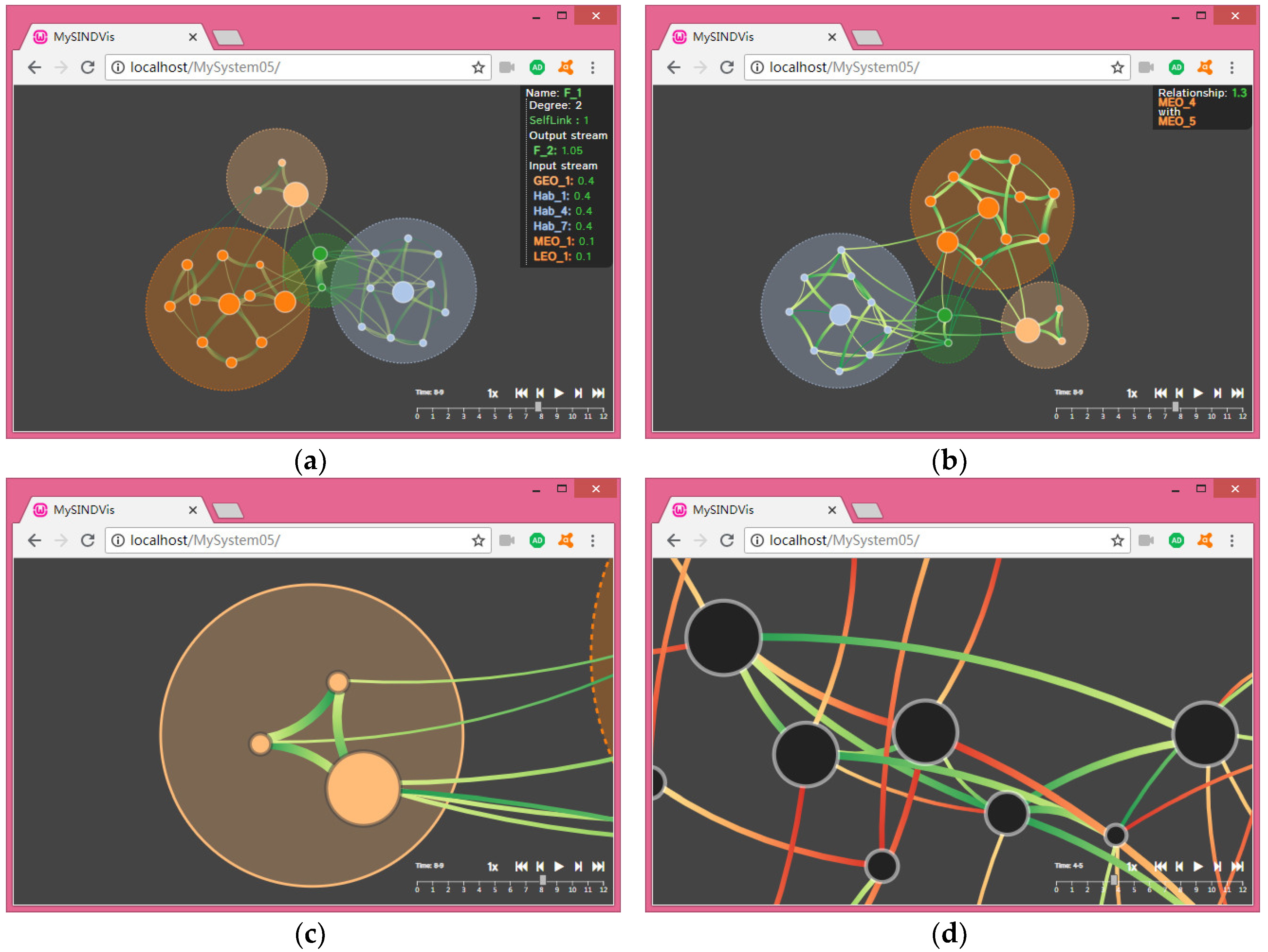
- Description 1: Both of Figure 16d and Figure 17a are views with the same network structure, and due to the limitations of the network structure itself, it is difficult for a user to understand the four-layer architecture of the SIN through Figure 16d. Therefore, we constrained the network nodes at different levels by introducing clustering coefficients. For the four-layer structure in SINDVis, the effect of Figure 17a is achieved by setting four different constraint values. After the constraint with the clustering coefficient, the network composed of four circular faces was included in the network nodes of the respective level, a clearer level display was realized without affecting the network’s overall topology structure.
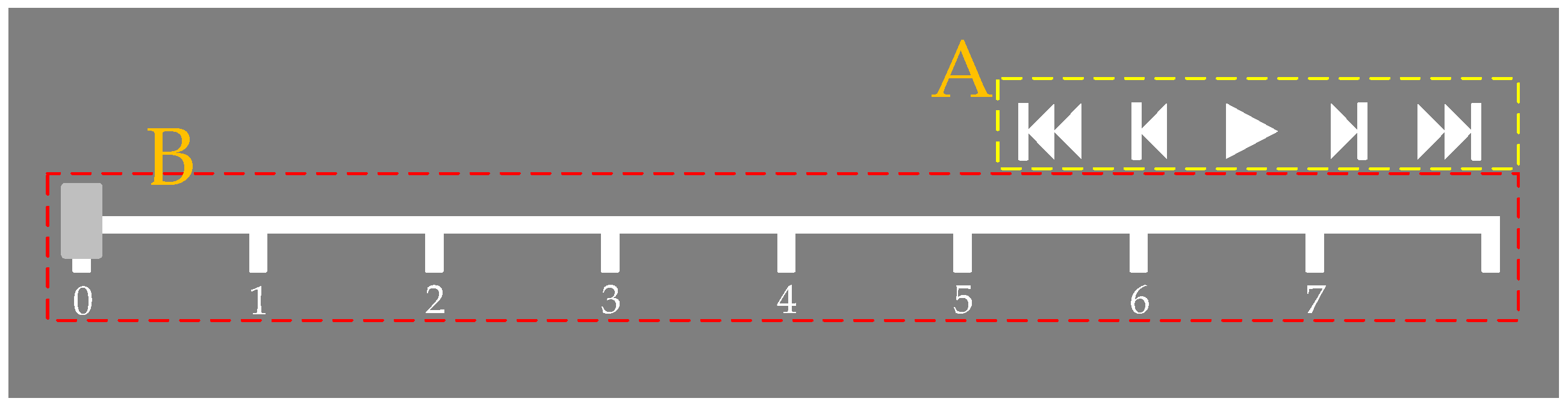
- Description 2: In combination with Figure 10 in Section 3.4.3 above, we used a timeline-based approach to accomplish animation control of the SINDVis system, as shown in Figure 16 and Figure 17 on the bottom, right corner of the page. We set the animation time zone to [0, 12], and carried out an animation demo in two ways. One way was through the mouse drag slider, according to the needs of users in real-time animation conversion. The other was by clicking the “Play/Pause” button to achieve an automatic display of animation. Meanwhile, in order to achieve a friendlier function design and meet the needs of more users, we added acceleration/deceleration control buttons to the timeline module.
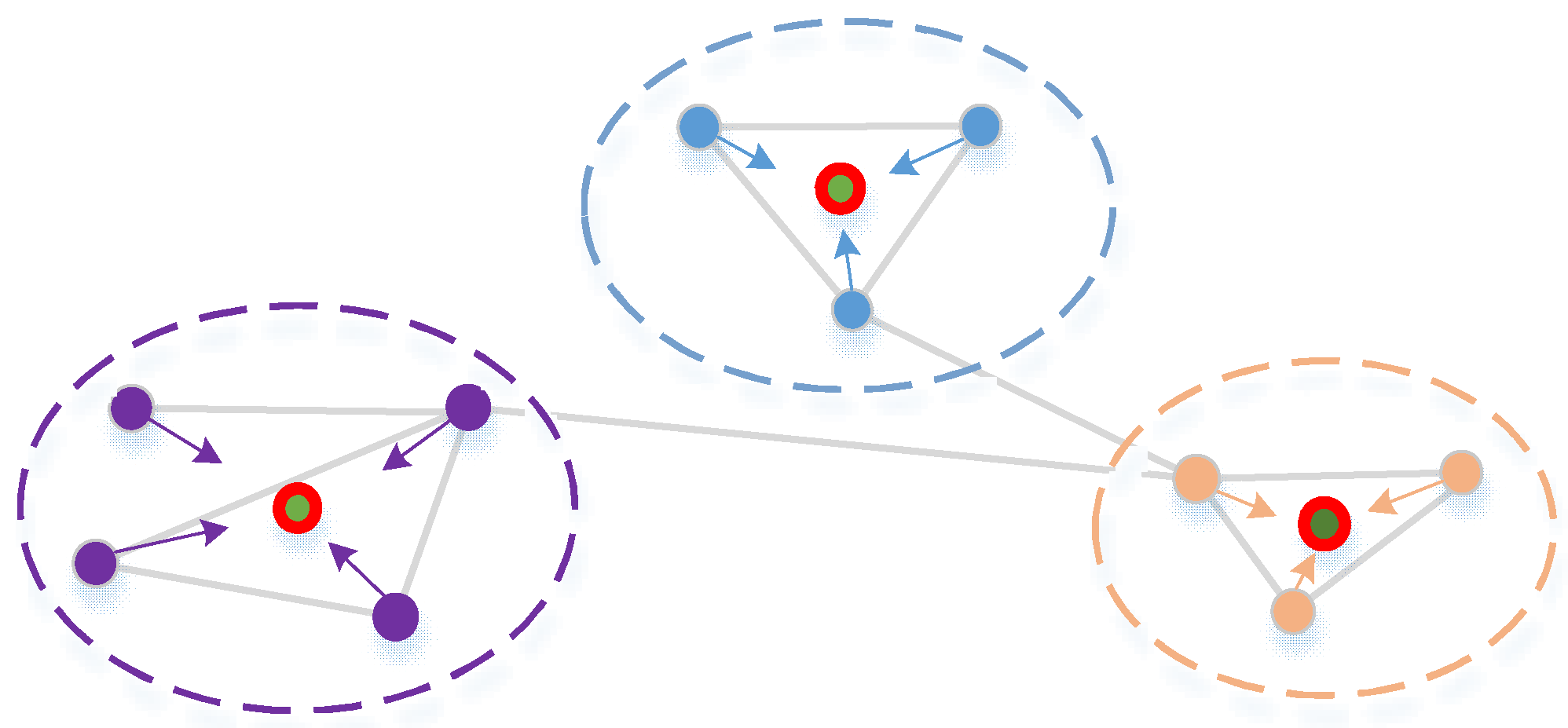
- Description 3: In order to highlight the differences in the importance levels of different nodes in the whole network, we used area coding to display the different degree values of the network nodes in TopolView. A big degree value corresponds a large area, or vice versa. Of course, given the limited scope of the view page, the node degree values mentioned above are relative values. Meanwhile, given the directionality of data transmission in the network, we used color-coding to show the differences between inputs and outputs, as shown in the gradient red and gradient green in the Figure.
5. Discussion
6. Conclusions
6.1. Summary
6.2. Limitations
- In order to illustrate the problem and simplify the operation, we controlled a certain small range of SIN (26 nodes, 58 edges) in the case description. However, the real network is much larger and more complex, and how to achieve a clearer display based on this system is not mentioned in this article.
- This study was implemented only to determine the underlying functionality and achieve a preliminary view display. Therefore, the integrity of the system was weakened during validation and the SINDVis system is not a complete system that can be used by users at its current stage.
- System development is a continuous iterative process, and we only constructed the SINDVis system based on the users’ initial requirements. At present, there is no mature product can consider the users’ real-time operation and use requirements. Whether the SINDVis can better achieve the different functions of users’ needs to be researched and demonstrated at a later stage. Meanwhile, we also improve and optimize the system in the future.
6.3. Prospect
- Reasonable layout and integration of GeoView and TopolView. That is, we aim to achieve a reasonable layout of the two views in one interface. One view is primary, the other is supplemented, and a smooth conversion between the main and secondary views is possible.
- Increasing the interactive operation modules of GeoView and TopolView. For example, the operation modules in the GeoView of the user should include the addition or deletion of entities according to a user’s own needs, changes in the entity running track, and so on. The operation modules in the TopolView of the user should include the addition or deletion of nodes and edges, changes in the scope of the local-world, and so on. This will allow users to achieve better understanding, control, and management of SIN.
- Constructing the primary version of the SINDVis system for users and collecting feedback and suggestions from different users to upgrade and optimize the system. Through a number of trials, feedback and optimization, the final version SINDVis system should be able to meet the needs of multi-class users.
Author Contributions
Funding
Conflicts of Interest
References
- Víctor, M.; Fernando, B.; Juan, C.C. A survey of link prediction in complex networks. ACM Comput. Surv. 2016, 49, 69. [Google Scholar]
- Zhou, J.G. Research on Key Technology of Spatial Information Network Based on DTN; Wuhan University: Wuhan, China, 2013; pp. 1–5. [Google Scholar]
- Li, D.R.; Shen, X.; Gong, J.Y.; Zhang, J.; Lu, J. On construction of China’s space information network. Geomat. Inf. Sci. Wuhan Univ. 2015, 40, 711–715. [Google Scholar]
- Yu, S.B.; Wu, L.D.; Zhang, X.T.; Li, C.; Ma, H.J. Survey of multi-feature visualization for space information network. J. China Acad. Electron. Inf. Technol. 2018, 13, 201–208. [Google Scholar]
- Zhang, W. Topological Control Theory and Method of Space Information Network; PLA University of Science and Technology: Nanjing, China, 2016; pp. 1–10. [Google Scholar]
- Yu, Q.Y.; Meng, W.X.; Yang, M.C.; Zheng, L.M.; Zhang, Z.Z. Virtual multi-beamforming for distributed satellite clusters in space information networks. IEEE Wirel. Commun. 2016, 23, 95–101. [Google Scholar] [CrossRef]
- Inícius, T.G.; Carla, M.D.; Sasso, F.; Ramin, S.; Liane, M.R.T.; Lisandro, Z.G. A survey on information visualization for network and service management. IEEE Commun. Surv. Tutor. 2016, 18, 285–323. [Google Scholar]
- Fabian, B.; Michael, B.; Stephan, D.; Daniel, W. A taxonomy and survey of dynamic graph visualization. Comput. Graph. Forum 2017, 36, 133–159. [Google Scholar]
- Burch, M. The dynamic graph wall: Visualizing evolving graphs with multiple visual metaphors. J. Vis. 2017, 20, 461–469. [Google Scholar] [CrossRef]
- Johannes, K.; Helwig, H. Visualization and visual analysis of multifaceted scientific data: A survey. IEEE Trans. Vis. Comput. Graph. 2013, 19, 495–513. [Google Scholar]
- Shneiderman, B.; Aris, A. Network visualization by semantic substrates. IEEE Trans. Vis. Comput. Graph. 2006, 12, 733–740. [Google Scholar] [CrossRef] [PubMed]
- Helen, C.P.; Eve, H.; Carsten, G. How important is the “mental map”?—An empirical investigation of a dynamic graph layout algorithm. In Proceedings of the 14th International Conference on Graph Drawing, Karlsruhe, Germany, 18–20 September 2006; Springer: Berlin/Heidelberg, 2007; pp. 184–195. [Google Scholar]
- Yu, S.B.; Wu, L.D. A key technology survey and summary of dynamic network visualization. In Proceedings of the 2017 IEEE 8th International Conference on Software Engineering and Service Science, Beijing, China, 24–27 November 2017; pp. 474–478. [Google Scholar]
- Yu, S.B.; Li, X.M.; Liu, D. Design of weapons and equipment system of systems evaluation based on B/S and MVC pattern. J. Terahertz Sci. Electron. Inf. Technol. 2015, 13, 635–640. [Google Scholar]
- Hu, H.Q.; Wu, L.D.; Yang, C. Multiple-view framework of visual analytics for time-varying satellite topology network. Syst. Eng. Electron. 2014, 36, 312–316. [Google Scholar]
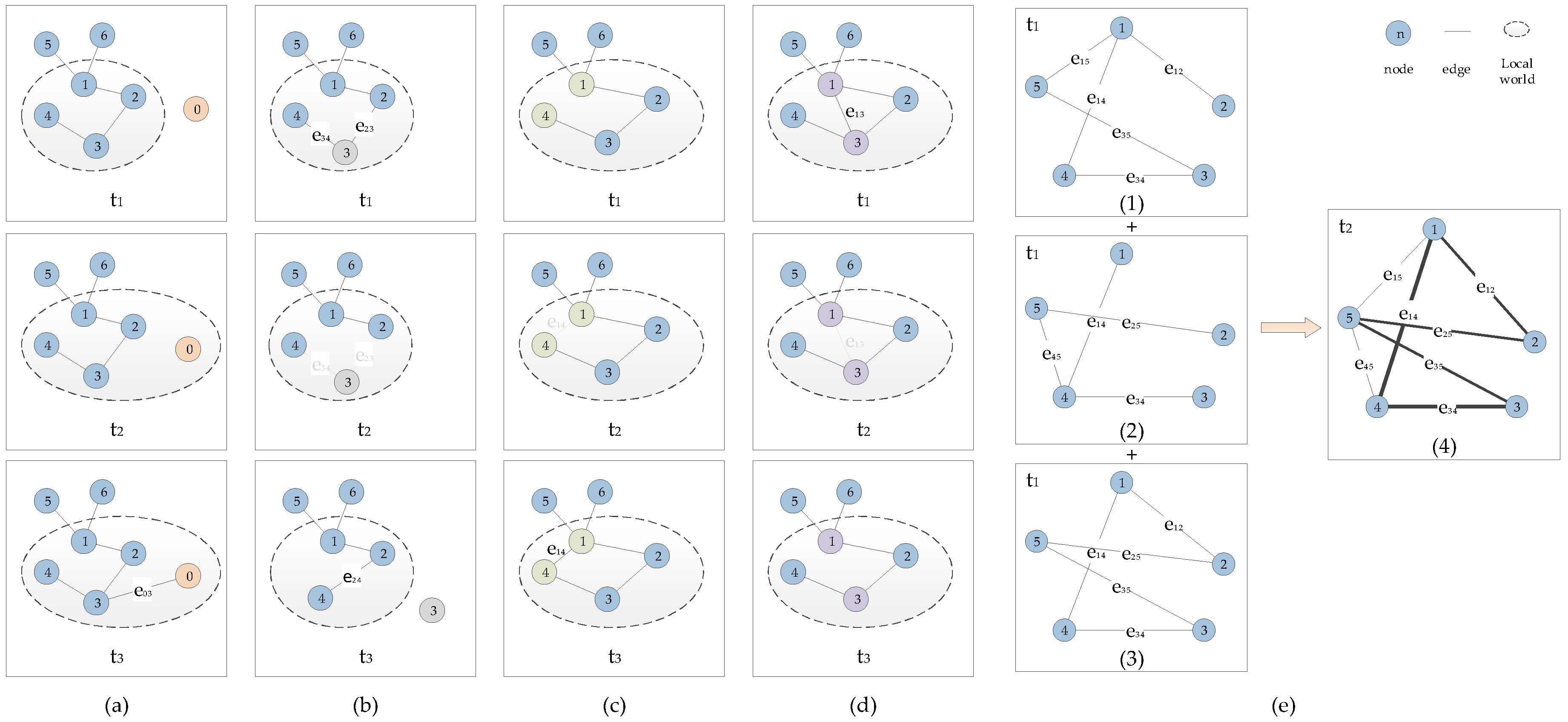
- Yu, S.; Wu, L.; Mu, X.; Xiong, W. Research on the weighted dynamic evolution model for space information networks based on local-world. Information 2018, 9, 158. [Google Scholar] [CrossRef]
- Pan, D.X.; Fu, Y.P.; Chen, J. Visualization and studies of ion-diffusion kinetics in cesium lead bromide perovskite nanowires. Nano Lett. 2018, 18, 1807–1813. [Google Scholar] [CrossRef] [PubMed]
- Yao, Z.H. Research on Key Technologies of Visual Analysis of Large Scale Network Topology Structure; Space Engineering University: Beijing, China, 2018; pp. 15–25. [Google Scholar]
- Dong, W.Q.; Fu, X.Y.; Xu, G.L.; Huang, Y. An improved force-directed graph layout algorithm based on aesthetic criteria. Comput. Vis. Sci. 2013, 16, 139–149. [Google Scholar] [CrossRef]
- Angus, G.; Andrew, B.; Kristine, L.; Xing, L.; Pierre, B.; Jean, K.; Walter, F. Dynamic influence networks for rule-based models. IEEE Trans. Vis. Comput. Graph. 2018, 24, 184–194. [Google Scholar]
- Sun, Z.; Deng, Z. An improved force-directed algorithm based on emergence for visualizing complex network. In Proceedings of the 2013 Chinese Intelligent Automation Conference, Yangzhou, China, 23–25 August 2013; Springer: Berlin/Heidelberg, 2013; pp. 305–315. [Google Scholar]
- Mustafa, H.; Wang, B.; Carlos, S.; Paul, R. Visual detection of structural changes in time-varying graphs using persistent homology. In Proceedings of the IEEE Pacific Visualization Symposium, Kobe, Japan, 10–13 April 2018; pp. 1–10. [Google Scholar]
- Tominski, C.; Gladisch, S.; Kister, U.; Dachselt, R.; Schumann, H. Interactive lenses for visualization: An extended survey. Comput. Graph. Forum. 2017, 36, 173–200. [Google Scholar] [CrossRef]
- Cockburn, A.; Karlson, A.; Bederson, B.B. A review of overview + detail, zooming, and focus + context interfaces. ACM Comput. Surv. 2009, 41, 1–31. [Google Scholar] [CrossRef]
- Wijk, J.J.; Nuij, W.A. Smooth and efficient zooming and panning. In Proceedings of the Ninth Annual IEEE Conference on Information Visualization, Seattle, WA, USA, 19–21 October 2003; pp. 15–23. [Google Scholar]
- Andrew, M.R.; Chris, N. Smooth, efficient, and interruptible zooming and panning. IEEE Trans. Vis. Comput. Graph. 2018. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network Layout | Network Visualization | Network Interaction |
|---|---|---|
| Force-Directed Algorithm | Animation | Fisheye view |
| Improvement 1 | Timeline | Focus and context |
| Improvement 2 | Fusion of above | Multi-view association |
| … | … | … |
| User Class | GeoView | TopolView |
|---|---|---|
| USE-1 | ★★★ | ★ |
| USE-2 | ★★ | ★★★ |
| USE-3 | ★★ | ★★★ |
| Name | Architecture | Service Type | Interactivity | Scope |
|---|---|---|---|---|
| STK | C/S | Heavy-weight | Weak | Commercial software |
| SaVi | C/S | Light-weight | Weak | Research software |
| SINDVis | B/S | Light-weight | Strong | Comprehensive software |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, S.; Wu, L.; Zhang, X.; Meng, X.; Cen, P. SINDVis: User-Centered Dynamic Interactive Visualization System for Space Information Networks. Electronics 2018, 7, 316. https://doi.org/10.3390/electronics7110316
Yu S, Wu L, Zhang X, Meng X, Cen P. SINDVis: User-Centered Dynamic Interactive Visualization System for Space Information Networks. Electronics. 2018; 7(11):316. https://doi.org/10.3390/electronics7110316
Chicago/Turabian StyleYu, Shaobo, Lingda Wu, Xitao Zhang, Xiangli Meng, and Pengrui Cen. 2018. "SINDVis: User-Centered Dynamic Interactive Visualization System for Space Information Networks" Electronics 7, no. 11: 316. https://doi.org/10.3390/electronics7110316
APA StyleYu, S., Wu, L., Zhang, X., Meng, X., & Cen, P. (2018). SINDVis: User-Centered Dynamic Interactive Visualization System for Space Information Networks. Electronics, 7(11), 316. https://doi.org/10.3390/electronics7110316