
Risk Analysis of the Future Implementation of a Safety Management System for Multiple RPAS Based on First Demonstration Flights

 ,
,  and
and
Abstract
:1. Introduction
- Surveillance over land and sea with extended endurance (fly time up to 24 h);
- Accurate reconnaissance on selected targets even if located deep in hostile areas;
- Real-time acquisition and transfer of images and videos to the ground station and/or to the analysis post (data exploitation);
- Employment even within crisis/conflict scenarios;
- Deployment for surveillance and recognition tasks during crisis events not requiring the same level of resources needed for deploying traditional manned aircraft;
- Because of aircrew absence, easier governmental authorization to perform risky operations preventing any crew from being captured in the operational theatre;
- Overall high flexibility due to the simple architecture of ground segment of the RPAS, including the modularity and scalability of mission sensors (payload);
- Low cost profile, given the absence of crew.
2. Air Traffic System Management: The New ICAO Concept of Operations and the Integration of RPAS into Non-Segregated Airspaces. The Safety Management System
2.1. ICAO New Concept of Airspaces and Traffic Management
2.2. Single European Sky Air Traffic Management Research Program (SESAR1/SESAR2020)
- A solid regulation and certification framework shall be implemented by European and national aviation authorities;
- New appropriate policies and procedures shall be defined to create an RPAS systems interface with ATC, maintaining/enhancing the current level of safety in daily flight operations;
- Reliable and safe Detect and Avoid capabilities shall be embedded on RPAS systems (on board the air segment or inside the ground station);
- A reliable and safe C2 (Command and Control) datalink shall be implemented together with spectrum protection techniques/devices;
- Specific training plans and certification procedures shall be defined for accrediting remote pilots.
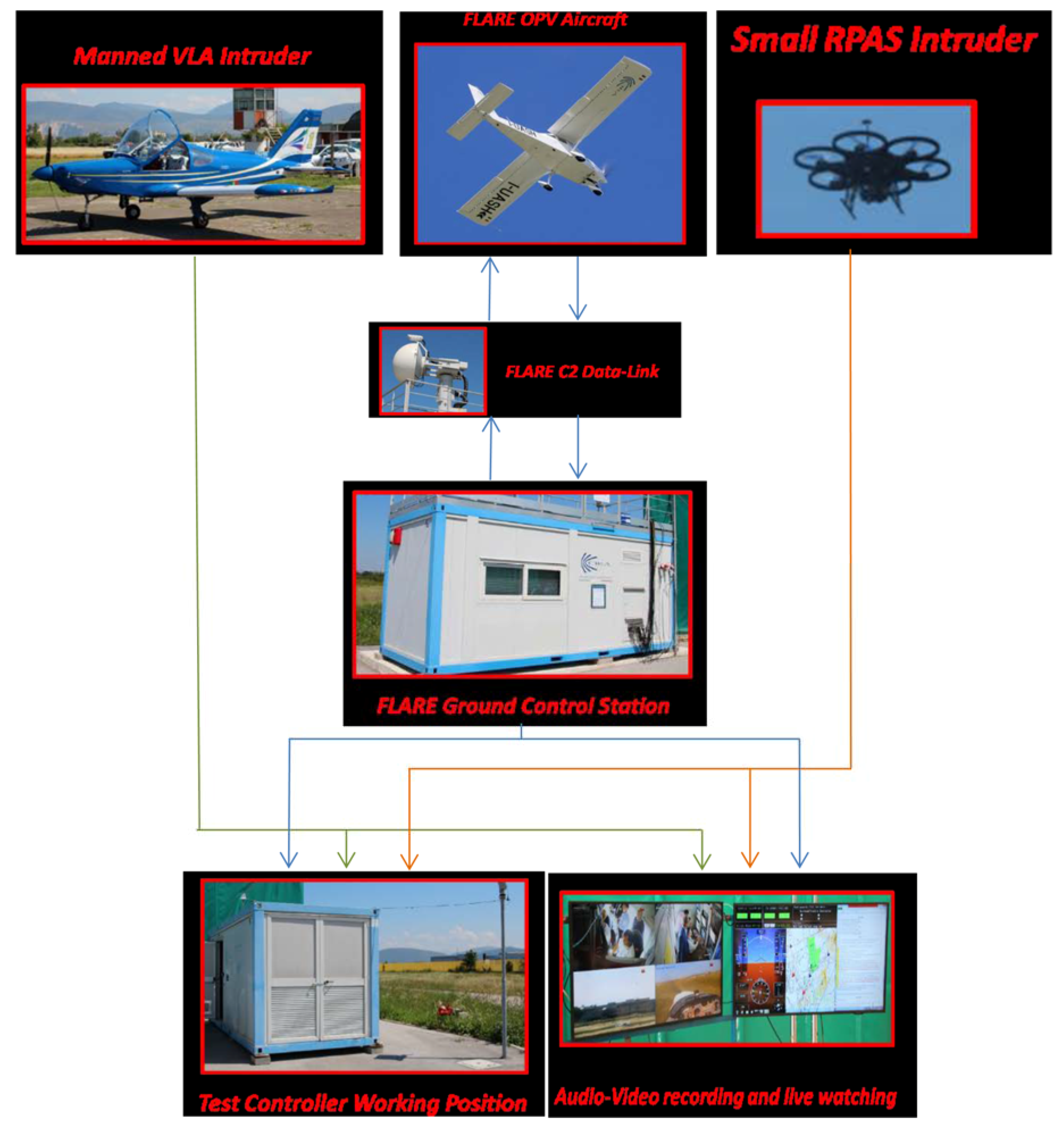
2.3. The RAID Demonstration Project: Test Design, Experimental Results, and Recommendations
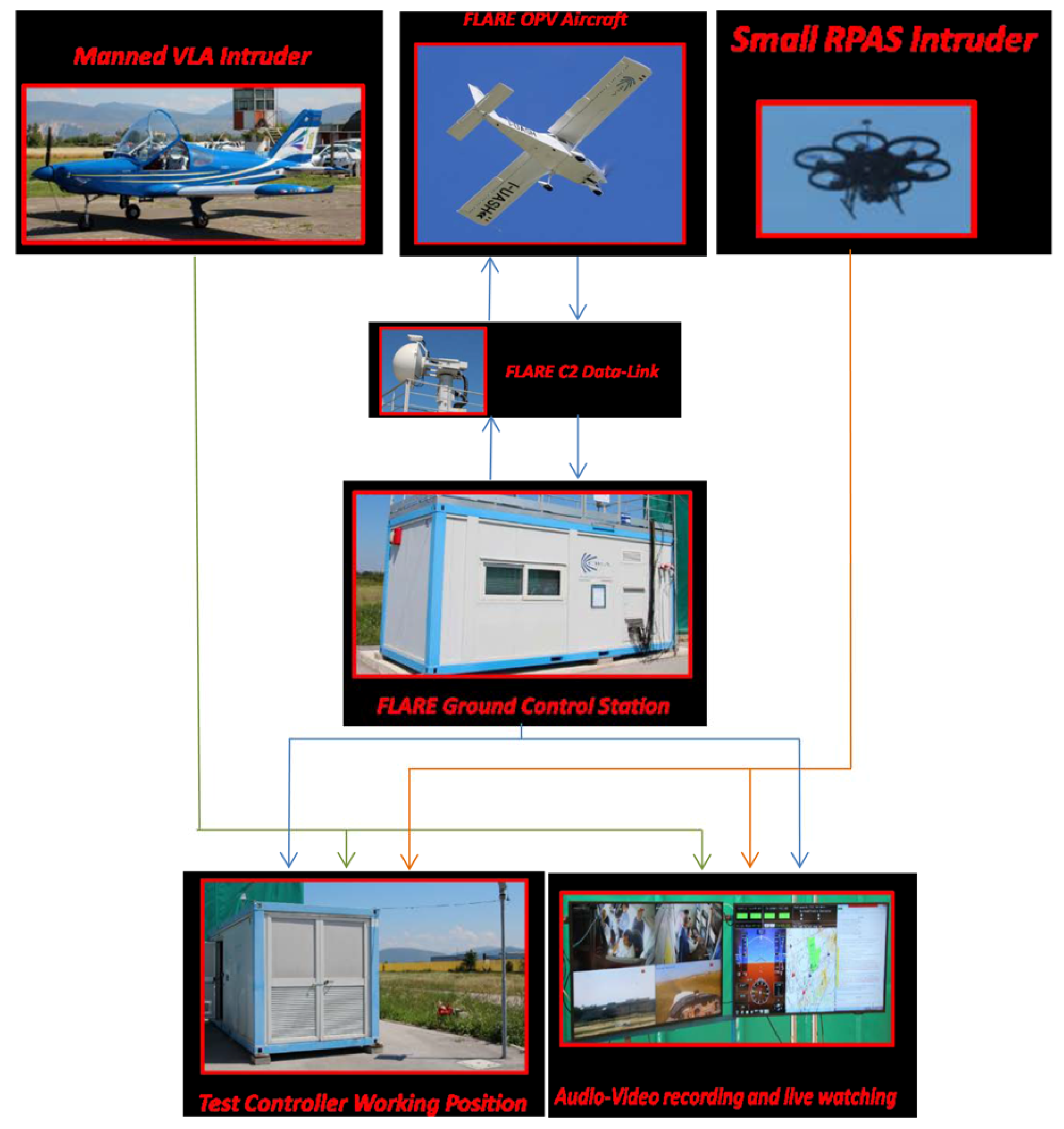
- A FLARE C2 Datalink (a full duplex communication link in S-band piloted by a directive antenna ranging up to 20 km);
- A FLARE Ground Control Station, able to replay the datalink and the ground segment subsystems architectures of an RPAS when the OPV was used as Remotely Piloted Aircraft System;
- An audio/video recording and live watching facility;
- A test controller working position.
- The impact of new concept of operations on the existing framework and feasibility about consequent changes; this aspect was assessed considering remote pilots’ and air traffic controllers’ (ATC) acceptability on this item;
- The impact of a new concept of operations and consequent changes on remote pilots, ATCOs, and their level of acceptability; this aspect was assessed evaluating situational awareness, error propensity, workload, and timeliness of undertaken actions;
- The impact of the usage of automated systems on existing context: this aspect was assessed by evaluating the consistency of automation, the human workload, the situational awareness, the trustiness of the automated system, and the timeliness of actions;
- Performance of Detect and Avoid (DAA) system: this aspect was assessed evaluating its accuracy, effectiveness, and timeliness based on the data/information provided;
- Performance of ATC Controllers operating with unmanned intruders: This aspect was assessed taking into account the communication load, effectiveness, timeliness, general situational awareness, and general framework acceptability.
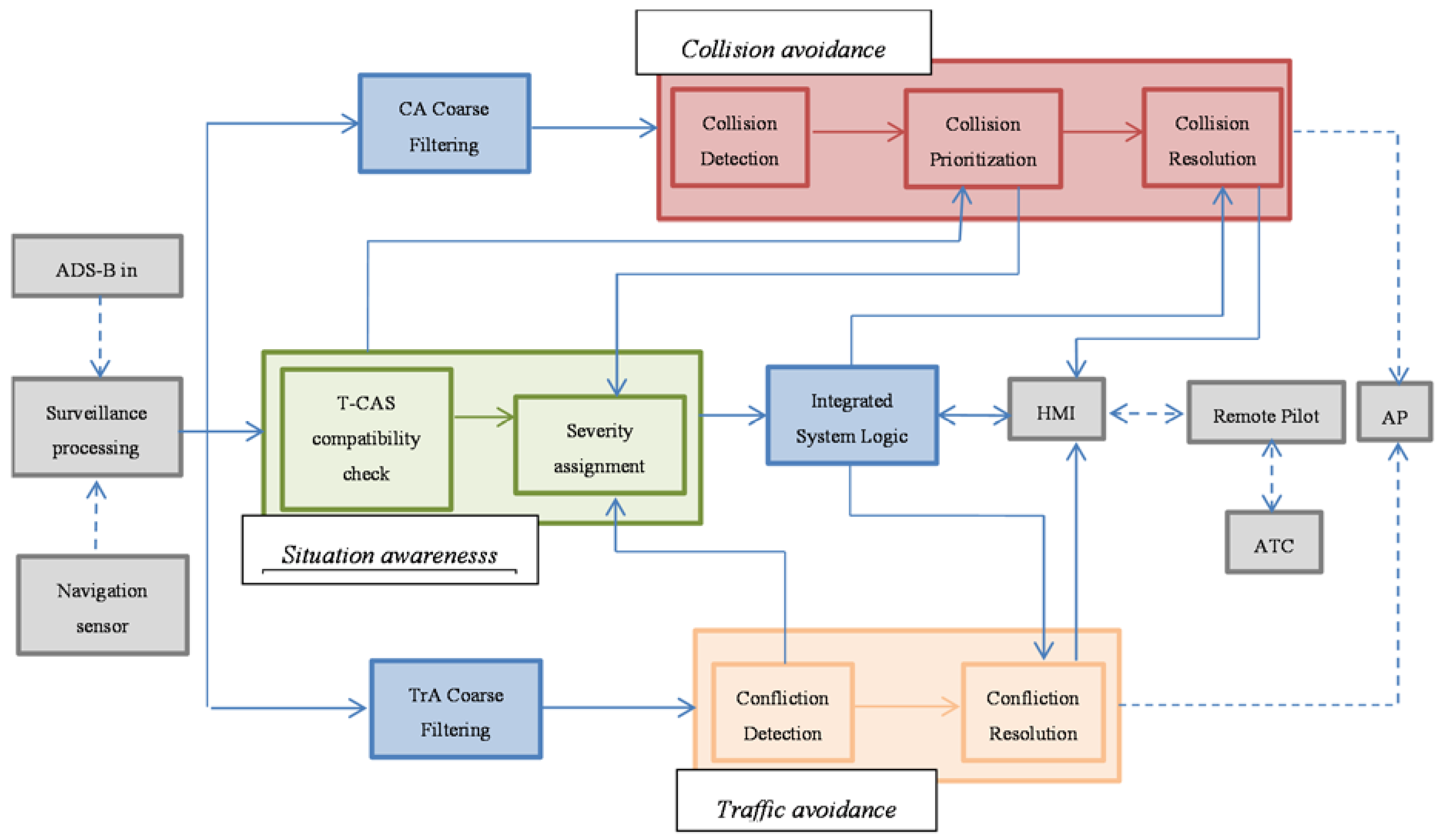
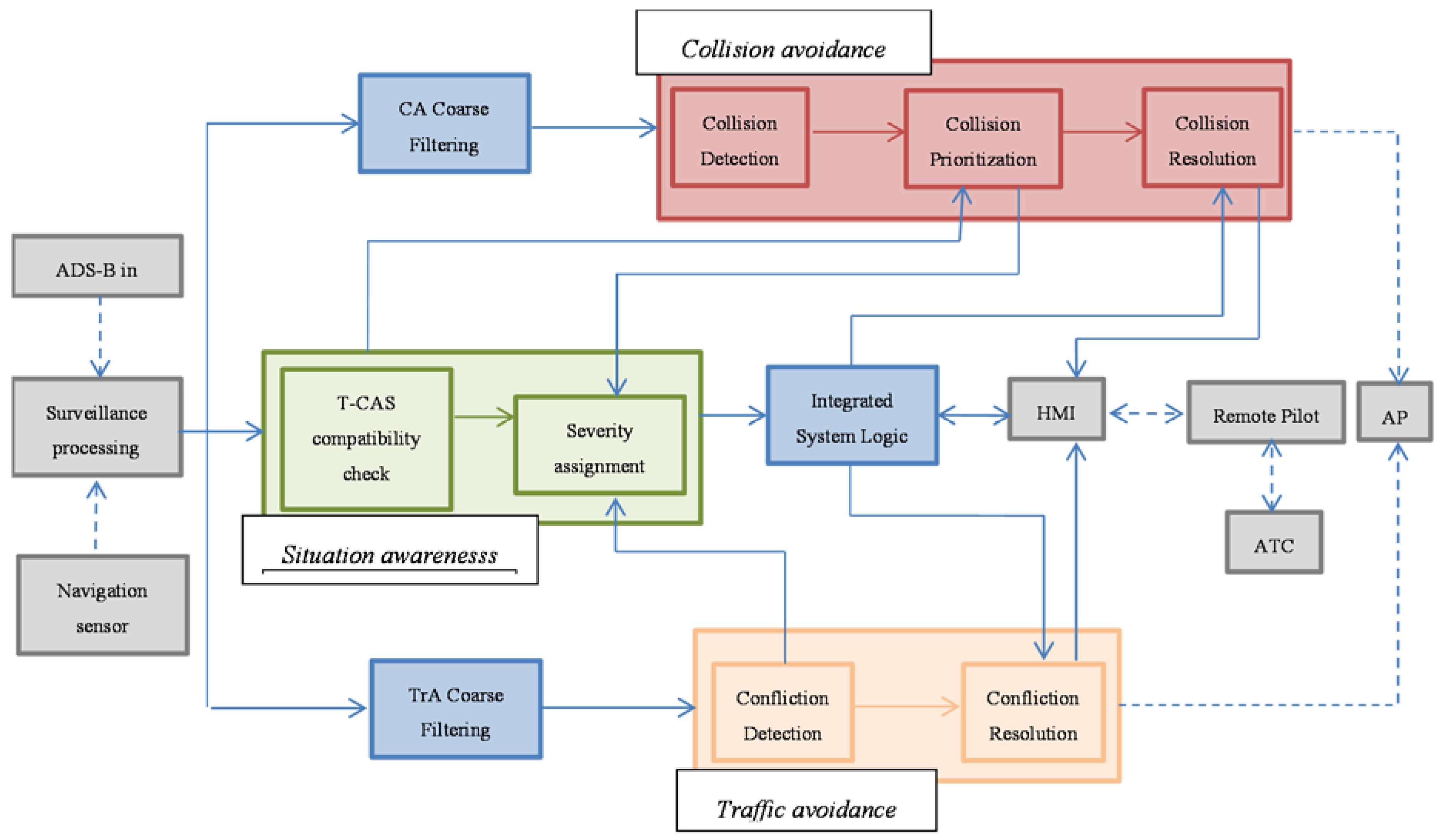
- Provide situational awareness to the remote pilot by showing an integrated overall traffic picture based on the elaboration of signals received from ADS-B equipment that is installed on the other aircraft;
- Provide self-separation to the RPAS in case of a missed separation related to a specified horizon; it indicates the suggested maneuver to restore the separation minima among the involved assets. A remote pilot can either accept the proposed maneuver by implementing it in manual mode or by letting the autopilot to automatically implement it;
- Provide collision avoidance functionalities in order to identify the preliminary conditions triggering a collision over a given time horizon, then provide the proper maneuver to avoid it.
- RPAS DAA/ADS-B system failure: Risk of collision (such as mid-air collisions with other aircraft or site crashing);
- C2 Link system failure: Likely loss of control of RPAS units; risk of collision (such as mid-air collisions with other aircraft or site crashing);
- Human performance referred to ATC controller with high workload situations: Risk of error, risk of collisions;
- Human performance referred to remote pilots with high workload case: Risk of error, risk of collisions;
- External factors: Emergency/contingency procedures; effects of DAA recovery maneuvers;
- Jamming and spoofing (not simultaneously performed): Effects on safety, especially in the case of DAA equipment failure.
- Human machine performance was evaluated according to Eurocontrol Human Factor Case Guidance specifications;
- Pilots, remote pilots, and ATC controllers were professional and highly skilled/trained;
- The remote pilot, flight director, safety pilot, and most of the relevant stakeholders participated in the post-flight debriefings in order to capture/consider all of the data/results from each point of view (lessons learned);
- The Controller Working Position (CWP), used during the experimental activity, was implemented according to the inputs received from the ATC controllers, being compliant with the design requirements and adherent to real ATC controllers’ working positions;
- ATC controllers were in direct communication with the FLARE remote pilot and the other flying platforms via VHF radio; however, the CWP could also supervise the air traffic equipped with ADS-B equipment, flying near the flight test area;
- New technologies such as ADS-B devices were tested within a step approach to achieve realistic scenarios.
2.4. The Concept of Safety Management System in Aviation and the New ICAO Prescriptions for All Worldwide Aeronautical Operators
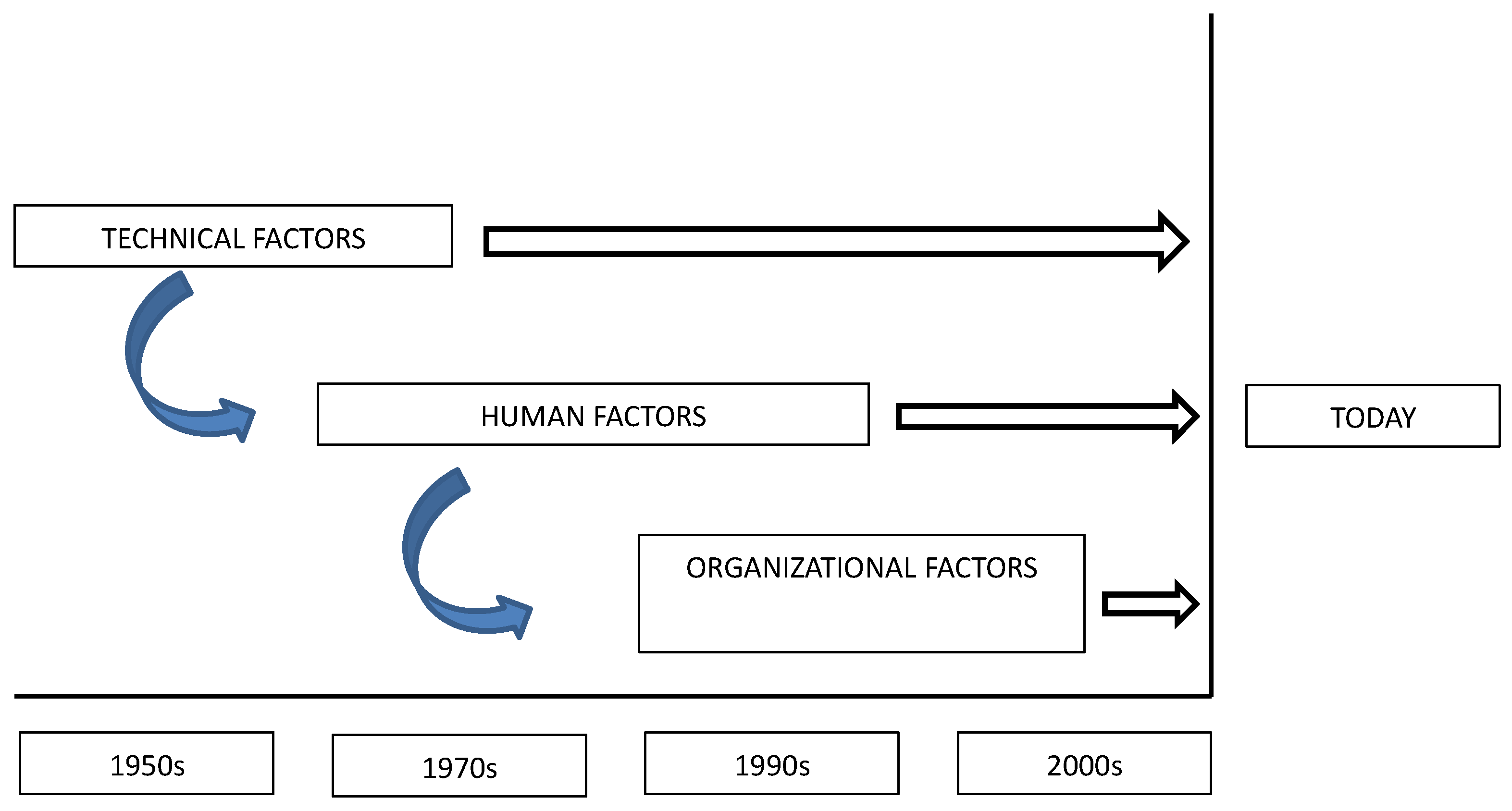
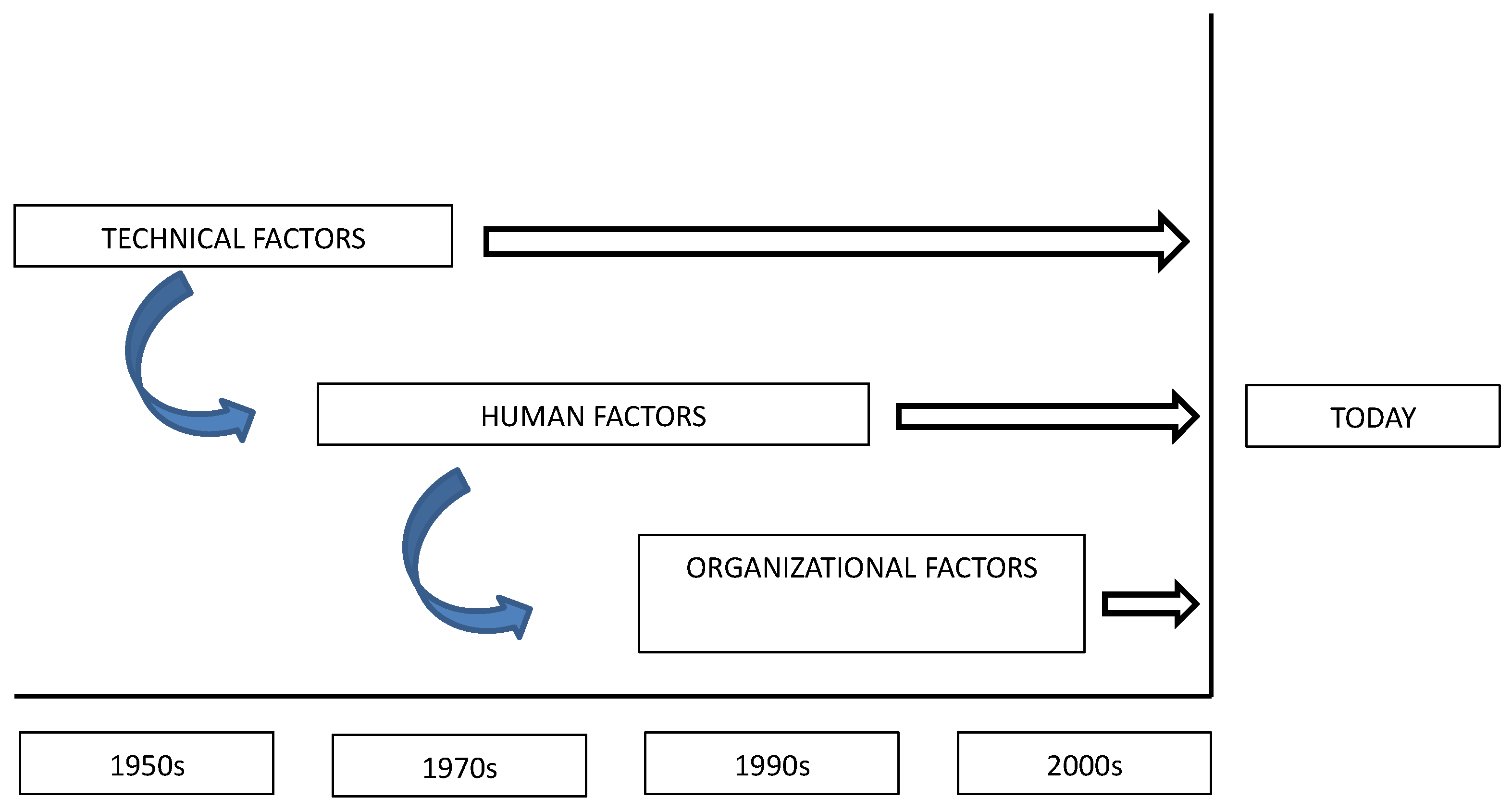
- A technical era, from the early 1900s to the late 1960s, when aviation developed as a form of mass transportation. In this period, deficiencies in safety were related to technical factors and a lack of technical knowledge;
- A human factor era, from the late 1960s to the mid-1990s: Improved technology and a wider technical knowledge allowed people to focus on safety issues related to human performance, which still remains a recurrent root cause of incidents: Human–machine interfaces were optimized; electronic systems and onboard computer systems changed the aircraft into a “system of subsystems” and helped the human operator to better perform his tasks. The aforementioned enhancements allowed for a decrease in the crew workload and the associated occurrence of human mistakes;
- An organizational era, from the mid-1990s to today, when safety is seen from a systematic perspective. Organizational factors are encompassed in the system together with technological and human factors; it is recognized that an organization’s culture and policies can have a great impact on safety and risk mitigation. Usually, a safety analysis resulting from data collected about occurred incidents is augmented by a new proactive approach to safety. Proactive and reactive methodologies have been developed to identify precursors of incidents before the incidents have the chance to occur. This new approach has led to the concept of a Safety Management System.
3. Elements of Risk Analysis to Implement a Novel Safety Management System for RPAS
- “Open” category: Safety will be assured by compliance with operational limitations, and the associated level of risk will be classified as low;
- “Specific category”: The operator is asked to provide a risk assessment together with a list of mitigation initiatives. Flight authorization is released by the proper National Aviation Authority, which can be supported by a qualified entity. The associated level of risk will be classified as medium;
- “Certified category”: Requirements become comparable to those related to manned aviation, overseen by the National Aviation Authorities (NAA) and EASA regulating areas such as licenses, airworthiness, maintenance programs, etc. The associated level of risk will be classified as high.
- Hazard analysis: A hazard is a condition or an object potentially able to cause injury/death or damage/failure to equipment and systems with consequent partial or total loss of their functionality; the resulting hazard analysis leads us to identify and prioritize the hazards;
- Safety risk identification and prioritization: This phase foresees (from [30]):
- Different RPAS propulsion systems:
- Rotor RPAS;
- Fixed wing RPAS;
- Hybrid propulsion RPAS.
- Different RPAS functional system architectures:
- Autopilots type, configuration and redundancy;
- Number of motors and related electronic management system;
- Types of Flight Termination Systems (FTSs) and functional link to the autopilot.
- In-flight hazards:
- Risk of mid-air collision with conflicting traffic or risk of terrain impact [32];
- Influence of meteorological conditions;
- Thunderstorms;
- Turbulence;
- Temperatures;
- Wind gusting.
- Other airborne hazards:
- Wake Turbulence;
- Wind shear;
- Potential impact with birds;
- Volcanic ash.
- On-ground hazards:
- Other surrounding aircraft on ground in the aerodrome area of operations;
- Other vehicles on ground in the aerodrome area of operations;
- Typical aerodrome infrastructures;
- People in the aerodrome operational areas.
- Hazards related to human factors:
- The absence of the pilot on board;
- The performance of the remote pilot;
- The performance of ATC personnel.
- Hazards related to the Ground Control Station (GCS)
- Hazards related to the Command and Control (C2) datalink:
- Functional aspects;
- The case of a loss of the datalink;
- The case of malicious jamming;
- The case of malicious spoofing.
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| 3D Missions | Dull, Dirty and Dangerous Missions |
| ADS-B | Automatic Dependent Surveillance Broadcast |
| AIRICA | ATM Innovative RPAS Integration for Coastguard Applications |
| AP | Autopilot |
| AMSL | Above Medium Sea Level |
| ARIADNA | Activities on RPAS Integration Assistance and Demonstration for operations in Non-Segregated Airspace |
| ATC | Air Traffic Control |
| ATCO | Air Traffic Controller |
| ATM | Air Traffic Management |
| C2 | Command and Control |
| CIRA | Centro Italiano Ricerche Aerospaziali |
| CLAIRE | CiviL Airspace Integration of RPAS in Europe |
| CTR | Control Zone |
| C WP | Controller Working Position |
| DAA | Detect and Avoid |
| DEMORPAS | Demonstration Activities for Integration of RPAS in SESAR |
| EASA | European Aviation Safety Agency |
| ENAC | Ente Nazionale Aviazione Civile |
| EU | European Union |
| FAA | Federal Aviation Administration |
| FLARE | Flying Laboratory for Aeronautical Research |
| FMEA | Failure Modes and Effects Analysis |
| FMECA | Failure Modes, Effects ad Criticality Analysis |
| GATM | Global Air Traffic Management |
| GCS | Ground Control Station |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| ICAO | International Civil Aviation Organization |
| IFF | Identification Friend or Foe |
| INSuRE | Integration into non-segregated ATM |
| ISR | Intelligence Surveillance Reconnaissance |
| MedALE | Mediterranean ATM Live Exercise |
| MoD | Minister of Defense |
| NOTAM | Notice to Airmen |
| ODREA | Operational Demonstration of RPAS in European Airspace |
| OPV | Optionally Piloted Vehicle |
| PtF | Permit to Fly |
| RADAR | Radio Detection and Ranging |
| RAF | Royal Air Force |
| RAID | RPAS-ATM Integration Demonstration |
| R&D | Research and Development |
| RPAS | Remotely Piloted Aircraft System |
| SCP | Supplementary Cooling Pack |
| SDPD | Surveillance Data Processing and Distribution |
| SESAR-JU | Single European Sky ATM Research – Joint Undertaking |
| SMS | Safety Management System |
| SSP | State Safety Program |
| STAMP | System-Theoretic Accident Model and Processes |
| TCAS | Traffic Alert and Collision Avoidance System |
| TEMPAREIS | Testing Emergency Procedures in Approach and En Route Integration Simulation |
| UAS | Unmanned Aerial System |
| UAV | Unmanned Aerial Vehicle |
| VLA | Very Light Aircraft |
References
- International Civil Aviation Organization. Circular 328 AN/190 Unmanned Aircraft Systems, 1st ed.; ICAO: Montréal, QC, Canada, 2011; pp. 1–54. [Google Scholar]
- De Rosa, A. Gli Aeromobili Militari a Pilotaggio Remoto: Evoluzione Normativa e Prospettive. Intervento Svolto nel corso del Seminario di Studi: Cyber Warfare ed Operazioni con Aeromobili a Pilotaggio Remoto: Problematiche Giuridiche; Centro Alti Studi per la Difesa Gruppo Italiano dell’International Society for Military Law and the Law of War: Roma, Italy, 2013; pp. 1–14. [Google Scholar]
- European Aviation Safety Agency. Technical Opinion Introduction of a Regulatory Framework for the Operation of Unmanned Aircraft Related A-NPA: 2015-10-RMT.0230; EASA: Köln, Germany, 2015; pp. 1–44. [Google Scholar]
- Ente Nazionale Aviazione Civile. Remotely Piloted Aerial Vehicles (RPAS), Courtesy English Translation, 2nd ed.; ENAC: Rome, Italy, 2016; pp. 1–38.
- International Civil Aviation Organization. Document: 10019 AN/507: Manual on Remotely Piloted Aircraft Systems (RPAS), 1st ed.; ICAO: Montréal, QC, Canada, 2015; pp. 1–54. [Google Scholar]
- Martin, T.L.; Campbell, D.A. RPAS Integration within an Australian ATM System: What equipment and which airspace. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 656–668. [Google Scholar]
- Cappello, F.; Ramasamy, S.; Sabatini, R. A low-cost and high-performance navigation system for small RPAS applications. Aerosp. Sci. Technol. 2016, 58, 529–545. [Google Scholar] [CrossRef]
- Ramasamy, S.; Sabatini, R.; Gardi, A. Novel flight management system for improved safety and sustainability in the CNS+A context. In Proceedings of the Integrated Communication, Navigation and Surveillance Conference (ICNS), Herdon, VA, USA, 21–23 April 2015; pp. G3-1–G3-11. [Google Scholar]
- Barrado, C.; Pérez-Batlle, M.; Lopez, M.; Pastor, E. Paired T-test analysis to measure the efficiency impact of a flying RPAS in the non-segregated airspace. In Proceedings of the 35th IEEE/AIAA Digital Avionics Systems Conference (DASC), Sacramento, CA, USA, 25–29 September 2016; pp. 1–7. [Google Scholar]
- Thomas, E.; Bleeker, O. Options for insertion of RPAS into the air traffic system. In Proceedings of the 34th IEEE/AIAA Digital Avionics Systems Conference (DASC), Prague, Czech Republic, 13–18 September 2015. [Google Scholar] [CrossRef]
- Cunliffe, A.M.; Anderson, K.; DeBell, L.; Duffy, J.P. A UK Civil Aviation Authority (CAA)-approved operations manual for safe deployment of lightweight drones in research. IJRS 2017. [Google Scholar] [CrossRef]
- Filippone, E.; Grimaccia, F.; Monteleone, A. Real-Time Simulations Results: Test scenarios DAA system. In Proceedings of the Workshop of RAID Project, Rome, Italy, 10 December 2015. [Google Scholar]
- International Civil Aviation Organization. Annex 2 to the Convention on International Civil Aviation, 10th ed.; ICAO: Montréal, QC, Canada, 2005; pp. 1–74. [Google Scholar]
- International Civil Aviation Organization. Amendment 43 to the International Standards Rules of the Air (Annex 2); ICAO: Montréal, QC, Canada, 2012; pp. 1–24. [Google Scholar]
- International Civil Aviation Organization. Document 9854 AN/458 Global Air Traffic Management Operational Concept, 1st ed.; ICAO: Montréal, QC, Canada, 2005; pp. 1–82. [Google Scholar]
- Cordón, R.R.; Sáez Nieto, F.J.; Cuerno Rejado, C. RPAS integration in non-segregated airspace: The SESAR approach System interfaces needed for integration SESAR WPE. In Proceedings of the Fourth SESAR Innovation Days, Madrid, Spain, 25–27 November 2014; pp. 1–8. [Google Scholar]
- Single European Sky ATM Research Joint Undertaking (SESAR JU). Demonstrating RPAS Integration in the European Aviation System A Summary of SESAR Drone Demonstration Projects Results; SESAR Joint Undertaking: Bruxelles, Belgium, 2016; pp. 1–28. [Google Scholar]
- Centro Italiano Ricerche Aerospaziali. SESAR Joint Undertaking RPAS 0.3 RAID Demonstration Report, 1st ed.; SESAR Joint Undertaking: Bruxelles, Belgium, 2016; pp. 1–156. [Google Scholar]
- International Civil Aviation Organization. Eleventh ICAO Air Navigation Conference CARE/ASAS Action Information from ANC/11 Related to ADS-B, ASAS and ACAS, 1st ed.; ICAO: Montréal, QC, Canada, 2004; pp. 1–54. [Google Scholar]
- International Civil Aviation Organization. ADS-B Implementation and Operations Guidance Document, 7th ed.; ICAO: Montréal, QC, Canada, 2014; pp. 1–85. [Google Scholar]
- Single European Sky ATM Joint Undertaking. Available online: http://www.sesarju.eu/sesar-solutions/enabling-aviation-infrastructure/ads-b-ground-surveillance-system (accessed on 27 February 2017).
- Available online: https://www.nationalarchives.gov.uk/doc/open-government-licence/version/3/ (accessed on 28 June 2017).
- Available online: http://www.airforcesmonthly.com/2009/10/28/nimrod-report-blasts-mod/ (accessed on 28 June 2017).
- Haddon-Cave, C. THE NIMROD REVIEW: An independent review into the broader issues surrounding the loss of the RAF Nimrod MR2 Aircraft XV230 in Afghanistan in 2006; The Stationery Office Limited: London, UK, 2009. [Google Scholar]
- Comitato 8 Ottobre 2001. Available online: http://www.comitato8ottobre.com/ (accessed on 27 February 2017).
- Vicinanza, E. Anatomia di un incidente Predator RQ-1C. Sicurezza Aeronautica Militare 2014, 305, 10–17. [Google Scholar]
- Generali, L. Anatomia di un incidente C130J. Sicurezza Aeronautica Militare 2014, 306, 14–19. [Google Scholar]
- Dekker, S.; Cilliers, P.; Hofmeyr, J.H. The complexity of failure: Implications of complexity theory for safety investigations. Saf. Sci. 2011, 49, 939–945. [Google Scholar] [CrossRef]
- Leveson, N.G. Applying system thinking to analyze and learn from events. Saf. Sci. 2011, 49, 55–64. [Google Scholar] [CrossRef]
- International Civil Aviation Organization. Document 9859 AN/474 Safety Management Manual (SMM), 3rd ed.; ICAO: Montréal, QC, Canada, 2013; pp. 1–54. [Google Scholar]
- U.S. Department of Energy. Human Performance Improvement Handbook, vol. 1; DOE Standard: Washington, DC, USA, 2009. Available online: http://energy.gov/sites/prod/files/2013/06/f1/doe-hdbk-1028-2009_volume1.pdf (accessed on 1 June 2017).
- Federal Aviation Administration. Safety Management System Manual: Air Traffic Organization, 4th ed.; Federal Aviation Administration: Washington, DC, USA, 2014; pp. 1–128.
- International Civil Aviation Organization. Annex 19 to the Convention on International Civil Aviation Safety Management, 1st ed.; ICAO: Montréal, QC, Canada, 2013; pp. 1–44. [Google Scholar]
- European Aviation Safety Agency. Explanatory note “Prototype” Commission Regulation on Unmanned Aircraft Operations; EASA: Köln, Germany, 2016. [Google Scholar]
- Gageik, N.; Benz, P.; Montenegro, S. Obstacle detection and collision avoidance for a UAV with complementary low-cost sensors. IEEE Access 2015, 3, 599–609. [Google Scholar] [CrossRef]
- EUROCONTROL: Bird’s Eye View of Present Drone Integration below 500ft. Available online: http://www.eurocontrol.int/events/rpas-atm-integration-workshop (accessed on 11 April 2017).
- Banghart, M.; Fuller, K. Utilizing confidence bounds in Failure Modes Effects Analysis (FMEA) Hazard Risk Assessment. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2014. [Google Scholar]
- Zio, E. Challenges in the vulnerability and risk analysis of critical infrastructures. Rel. Eng. Syst. Saf. 2016, 152, 137–150. [Google Scholar] [CrossRef]
- Aven, T. Risk assessment and risk management: Review of recent advances on their foundation. Eur. J. Oper. Res. 2016, 253, 1–13. [Google Scholar] [CrossRef]
- Leveson, N.G. Engineering a Safer World: Systems Thinking Applied to Safety; The MIT Press: Cambridge MA, USA, 2011; Available online: http://mitpress.mit.edu/books/engineering-safer-world (accessed on 24 June 2017).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Light | Traffic | FLARE in RPAS Mode (Ime Window) | Hazards | ||||
|---|---|---|---|---|---|---|---|
| DAA/ADS-B System Failure | 2 Link System Failure | Limitation in Human Performances | Weather and Terrain on DAA and C2 Link Systems | Loss of GNSS, DAA and C2 Link Systems | |||
| 1 | FLARE A/C only | 41‘ | - | - | x | - | - |
| 2 | FLARE A/C only | 22‘ | - | - | x | - | - |
| 3 | FLARE A/C only | 33‘ | - | - | x | x | x |
| 4 | FLARE A/C & Mini RPAS | 24‘ | - | - | x | - | - |
| 5 | FLARE A/C & manned VLA | 7‘ | - | - | x | - | - |
| 6 | FLARE A/C & manned VLA | 20‘ | - | - | x | - | - |
| 7 | FLARE A/C only | 27‘ | - | - | x | x | x |
| 8 | FLARE A/C & manned VLA | 25‘ | - | - | x | x | x |
| 9 | FLARE A/C & manned VLA | 29‘ | x | x | x | x | x |
| 10 | FLARE A/C & manned VLA | 31‘ | x | x | x | x | x |
| 11 | FLARE A/C & manned VLA | 6‘ | x | x | x | x | x |
| 12 | FLARE A/C only | 20‘ | x | x | x | x | x |
| Likelihood | Meaning | Value |
|---|---|---|
| Frequent | Likely to occur many times (has occurred frequently) | 5 |
| Occasional | Likely to occur sometimes (has occurred infrequently) | 4 |
| Remote | Unlikely to occur, but possible (has occurred rarely) | 3 |
| Improbable | Very unlikely to occur (not known to have occurred) | 2 |
| Extremely improbable | Almost inconceivable that the event will occur | 1 |
| Severity | Meaning | Value |
|---|---|---|
| Catastrophic | Equipment destroyed Multiple deaths | 5 |
| Hazardous | A large reduction in safety margins, physical distress or a workload such that the operators cannot be relied upon to perform their tasks accurately or completely Serious injury Major equipment damage | 4 |
| Major | A significant reduction in safety margins, a reduction in the ability of the operators to cope with adverse operating conditions as a result of an increase in workload or as a result of conditions impairing their efficiency Serious incident Injury to persons | 3 |
| Minor | Nuisance Operating limitations Use of emergency procedures Minor incident | 2 |
| Negligible | Few consequences | 1 |
| Risk Probability | Risk Severity | ||||
|---|---|---|---|---|---|
| Catastrophic A | Hazardous B | Major C | Minor D | Negligible E | |
| Frequent 5 | 5A | 5B | 5C | 5D | 5E |
| Occasional 4 | 4A | 4B | 4C | 4D | 4E |
| Remote 3 | 3A | 3B | 3C | 3D | 3E |
| Improbable 2 | 2A | 2B | 2C | 2D | 2E |
| Extremely improbable 1 | 1A | 1B | 1C | 1D | 1E |
| Tolerability Description | Assessed Risk Index | Suggested Criteria |
|---|---|---|
 | 5A, 5B, 5C, 4A, 4B, 3A | Unacceptable under the existing circumstances |
| 5D, 5E, 4C, 4D, 4E, 3B, 3C, 3D, 2A, 2B, 2C, 1A | Acceptable based on risk mitigation. It may require management decision | |
| 3E, 2E, 1E, 2D, 1D, 1B, 1C, | Acceptable |
| Risk Index Range | Description | Recommended Action |
|---|---|---|
| 5A, 5B, 5C, 4A, 4B, 3A | High risk | Cease or cut back operation promptly if necessary. Perform priority risk mitigation to ensure that additional or enhanced preventive controls are put in place to bring down the risk index to the moderate or low range. |
| 5D, 5E, 4C, 4D, 4E, 3B, 3C, 3D, 2A, 2B, 2C, 1A | Moderate risk | Schedule performance of a safety assessment to bring down the risk index to the low range if viable. |
| 3E, 2E, 1E, 2D, 1D, 1B, 1C, | Low risk | Acceptable as is. No further risk mitigation required. |
| Hazard | Risk Assessment | |||||
|---|---|---|---|---|---|---|
| Safety Risk Probability | Safety Risk Severity | Safety Risk Assessment | Tolerability | Risk Range Description | Recommended Action | |
| DAA/ADS-B failure | Occasional (4) | Catastrophic (5 or A) | 4A | Unacceptable | High risk | Cease or cut back operation promptly |
| C2 link failure | Occasional (4) | Catastrophic (5 or A) | 4A | Unacceptable | High risk | Cease or cut back operation promptly |
| Human factor: ATC high workload | Occasional (4) | Hazardous (4 or B) | 4B | Unacceptable | High risk | Cease or cut back operation promptly |
| Human factor: Remote pilot high workload | Occasional (4) | Hazardous (4 or B) | 4B | Unacceptable | High risk | Cease or cut back operation promptly |
| Meteorological conditions | N/A7 | - | - | - | - | |
| Impact against terrain | Occasional (4) | Catastrophic (5 or A) | 4A | Unacceptable | High risk | Cease or cut back operation promptly |
| Jamming/spoofing with DAA/ADS-B in failure | Improbable (2) | Hazardous (4 or B) | 2B | Acceptable based on risk mitigation | Moderate risk | Schedule performance of a safety assessment to bring down the risk index to the low range if viable |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grimaccia, F.; Bonfante, F.; Battipede, M.; Maggiore, P.; Filippone, E. Risk Analysis of the Future Implementation of a Safety Management System for Multiple RPAS Based on First Demonstration Flights. Electronics 2017, 6, 50. https://doi.org/10.3390/electronics6030050
Grimaccia F, Bonfante F, Battipede M, Maggiore P, Filippone E. Risk Analysis of the Future Implementation of a Safety Management System for Multiple RPAS Based on First Demonstration Flights. Electronics. 2017; 6(3):50. https://doi.org/10.3390/electronics6030050
Chicago/Turabian StyleGrimaccia, Francesco, Federica Bonfante, Manuela Battipede, Paolo Maggiore, and Edoardo Filippone. 2017. "Risk Analysis of the Future Implementation of a Safety Management System for Multiple RPAS Based on First Demonstration Flights" Electronics 6, no. 3: 50. https://doi.org/10.3390/electronics6030050
APA StyleGrimaccia, F., Bonfante, F., Battipede, M., Maggiore, P., & Filippone, E. (2017). Risk Analysis of the Future Implementation of a Safety Management System for Multiple RPAS Based on First Demonstration Flights. Electronics, 6(3), 50. https://doi.org/10.3390/electronics6030050