
Fully-Integrated Converter for Low-Cost and Low-Size Power Supply in Internet-of-Things Applications


Abstract
:1. Introduction
- (i)
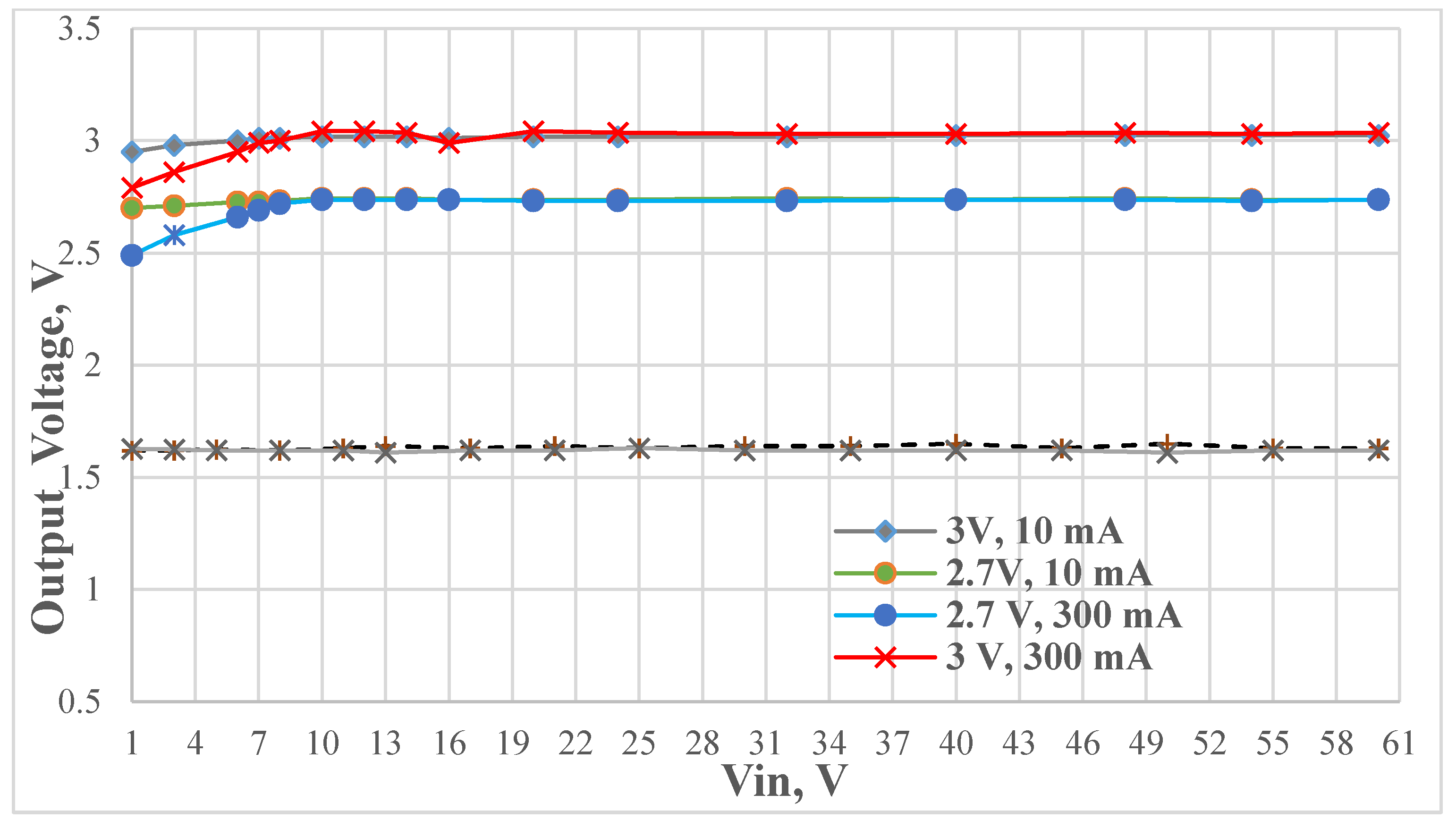
- It can sustain a wide input voltage range from 1 V to 60 V;
- (ii)
- It can work both in step-up or step-down modes as an inductor-based switching converters, but it is inductorless, and has low-ripple performance as linear regulators;
- (iii)
- It keeps power-efficiency levels much higher than linear regulators and comparable with inductor-based regulators;
- (iv)
- It uses only switches and capacitors, and hence can be easily integrated in a single chip reducing area and assembly effort/cost vs. inductor-based DC/DC converters.
2. Models and Architecture of the Multi-Output Switched Capacitor Converter
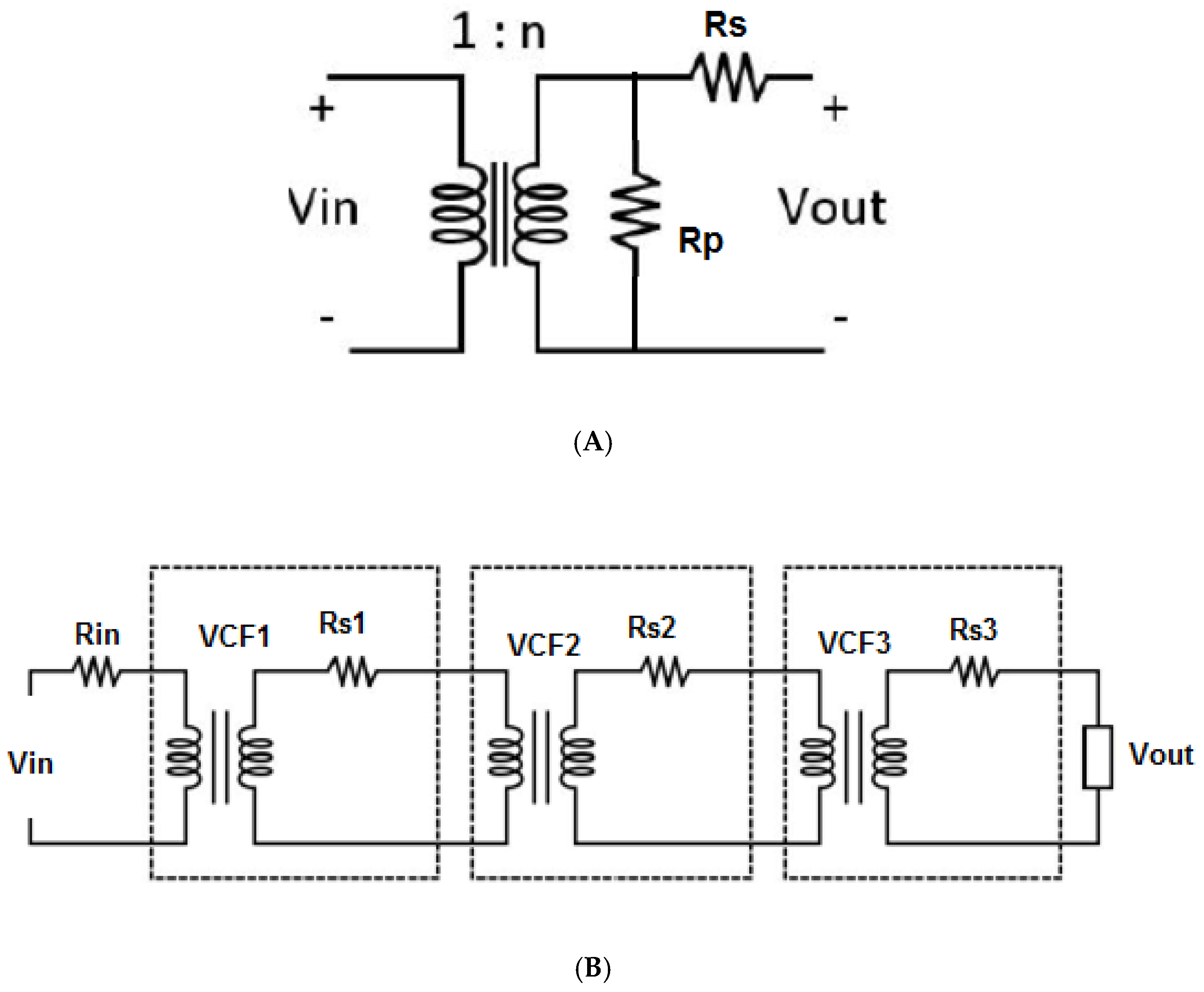
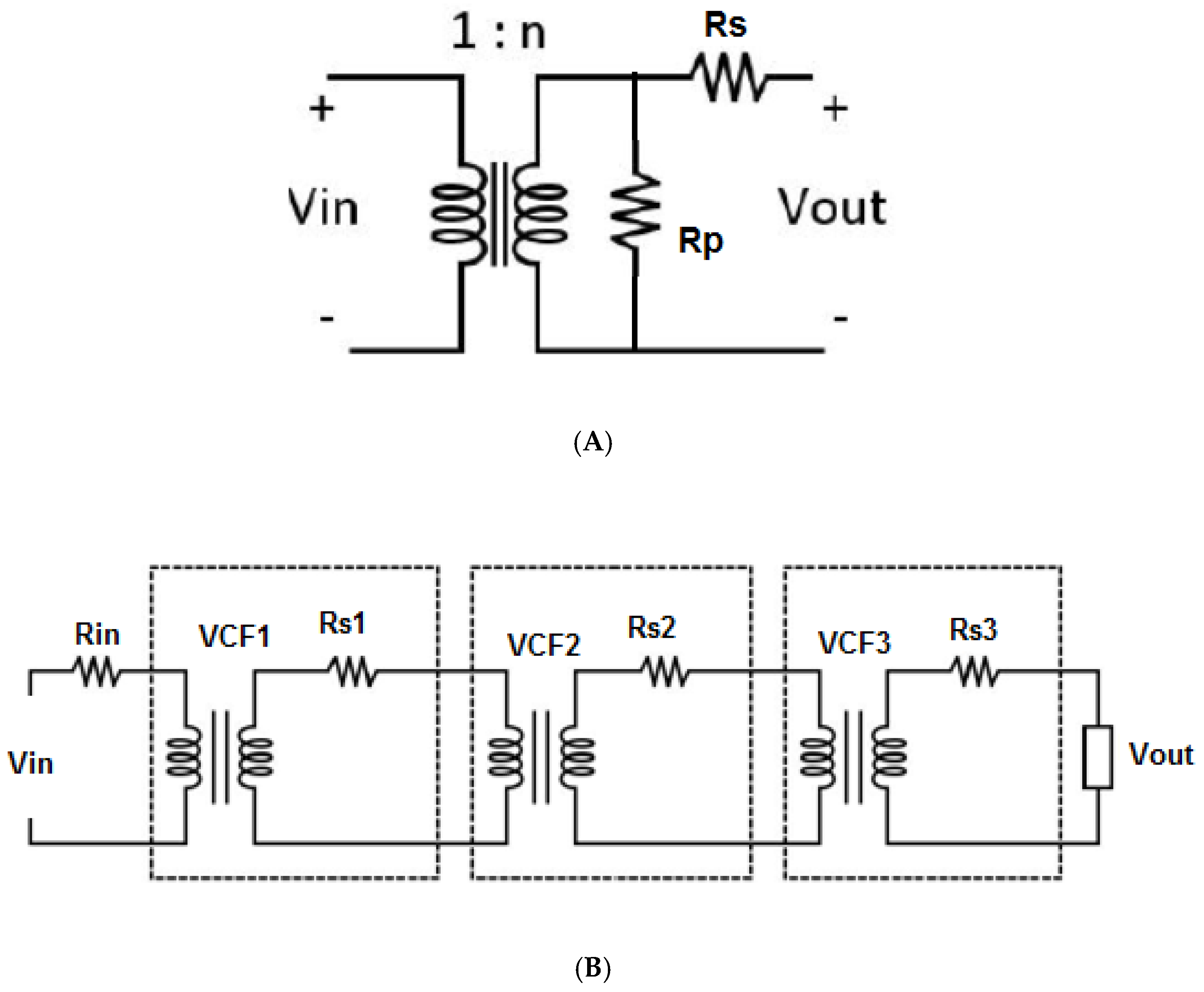
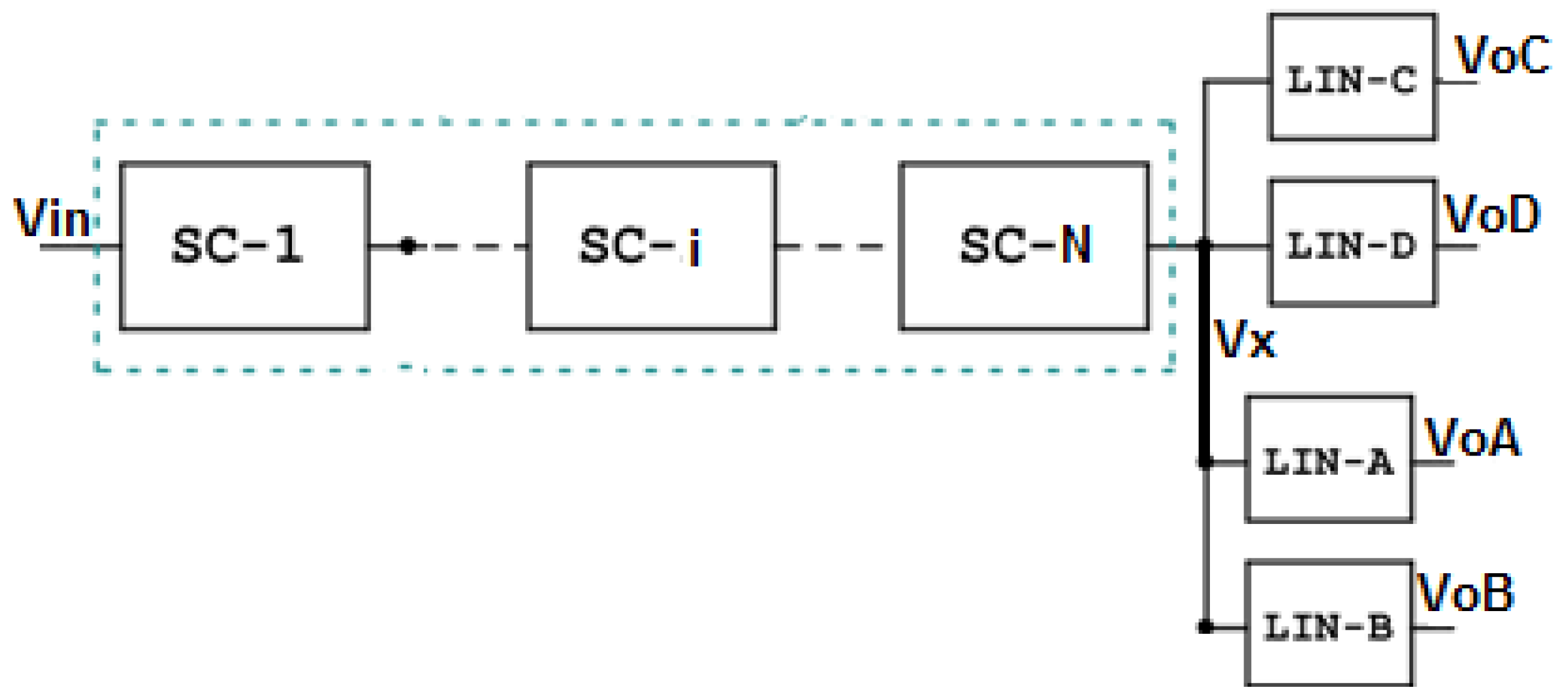
2.1. Models of the Multi-Output Switched Capacitor Converter
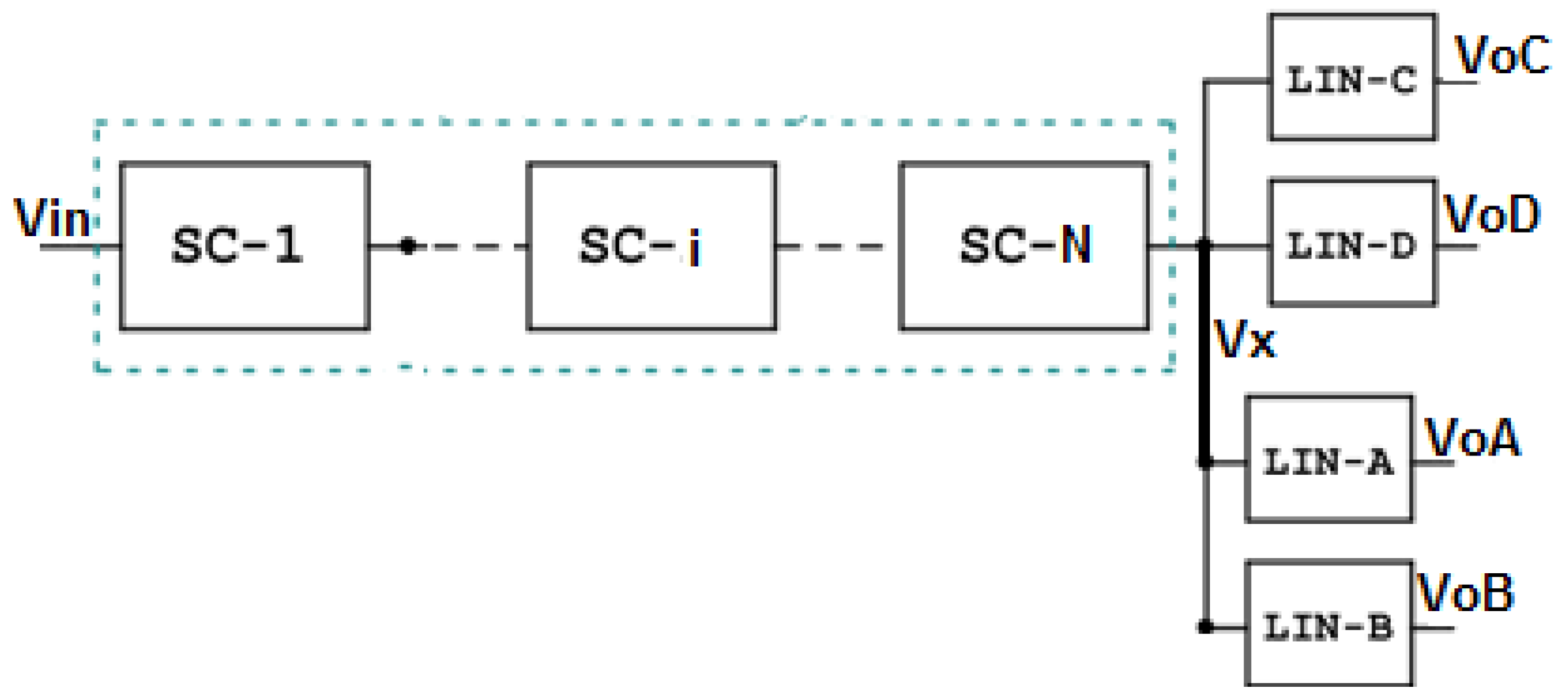
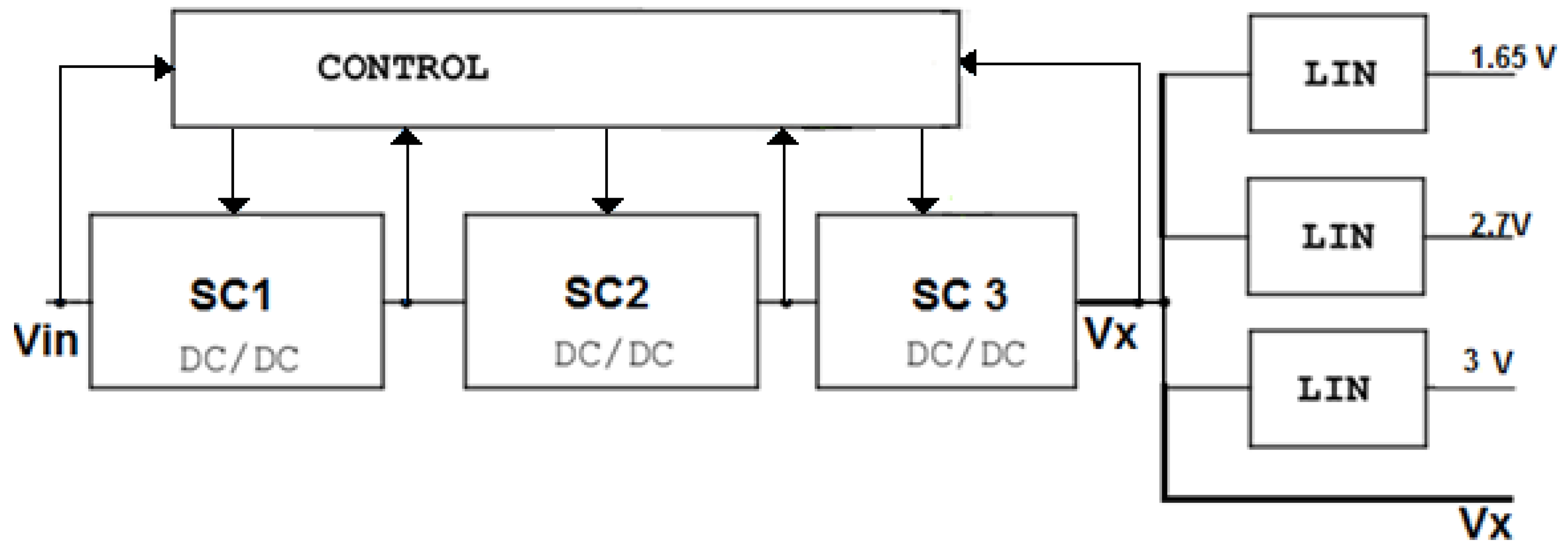
2.2. Architecture of the Multi-Output Switched Capacitor Converter
- (i)
- change the VCF by reconfiguring the circuit, thus modifying the term in Equation (6);
- (ii)
- change the output resistor equivalent value in Equation (5), thus modifying the term in Equation (6).
3. Designed DC/DC Converter
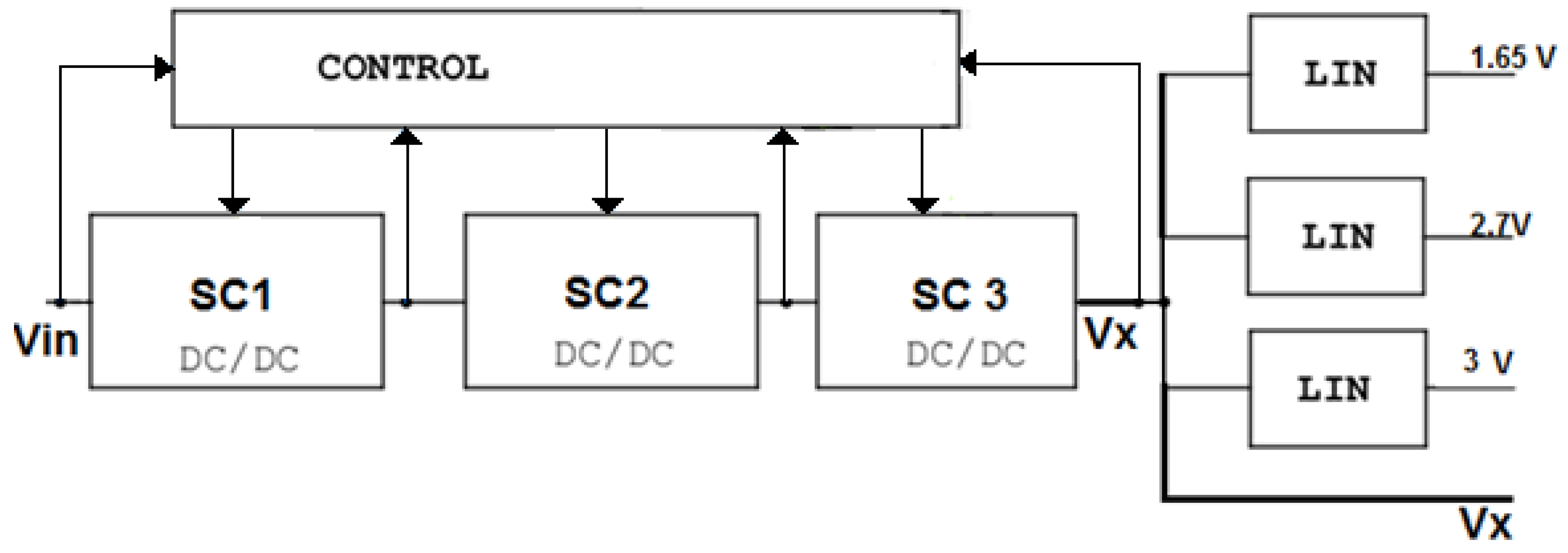
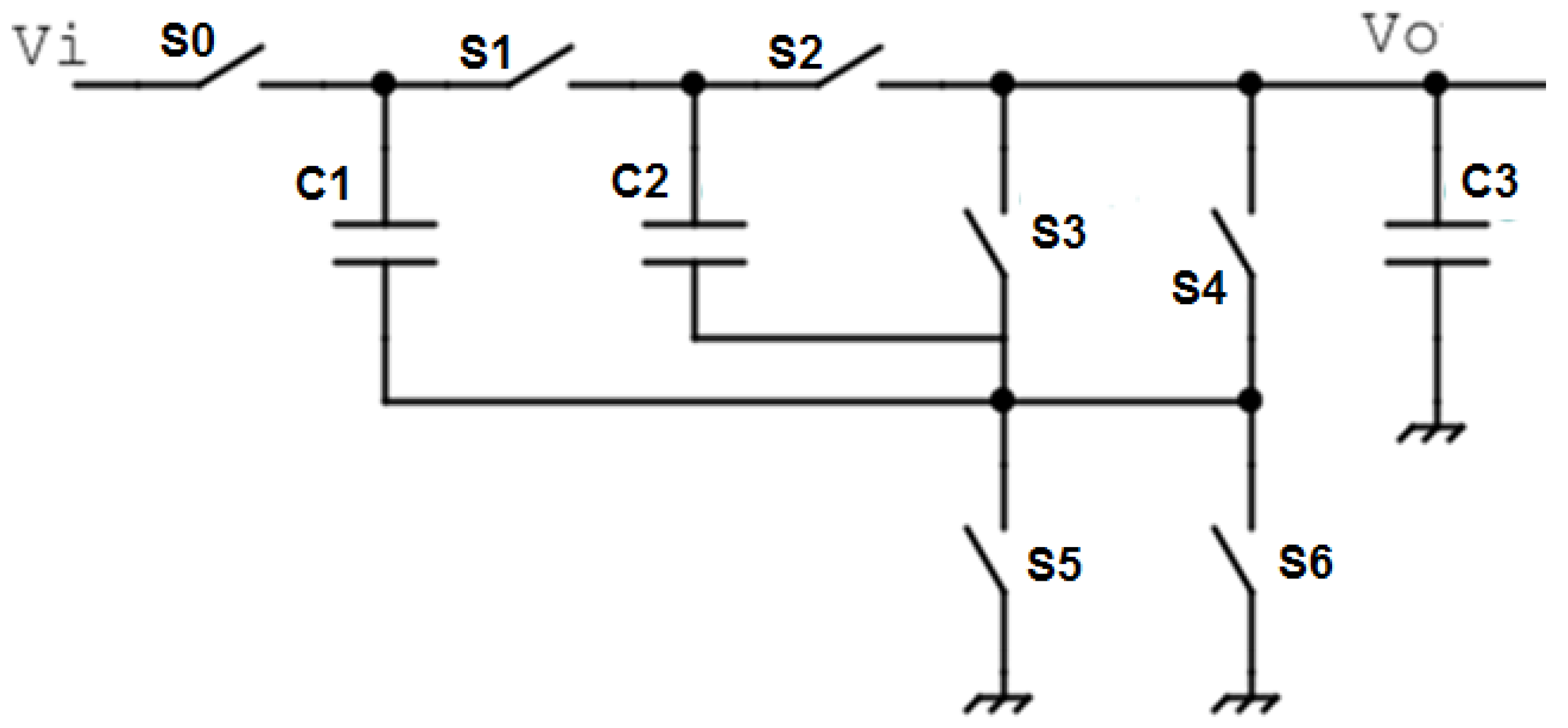
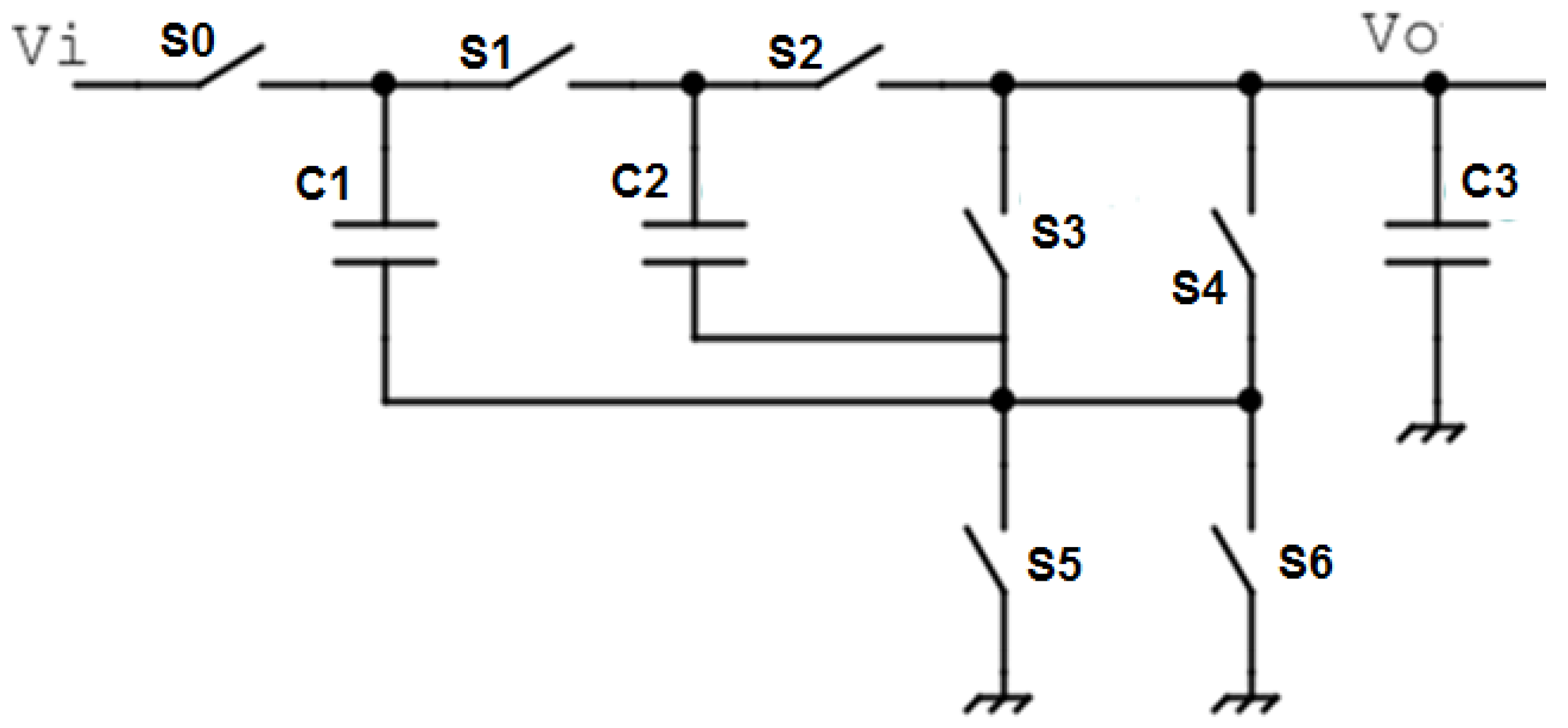
3.1. DC/DC Architecture and Circuit-Level Design
- (1)
- When facing low voltages the switch may be realized with a simple MOS transistor.
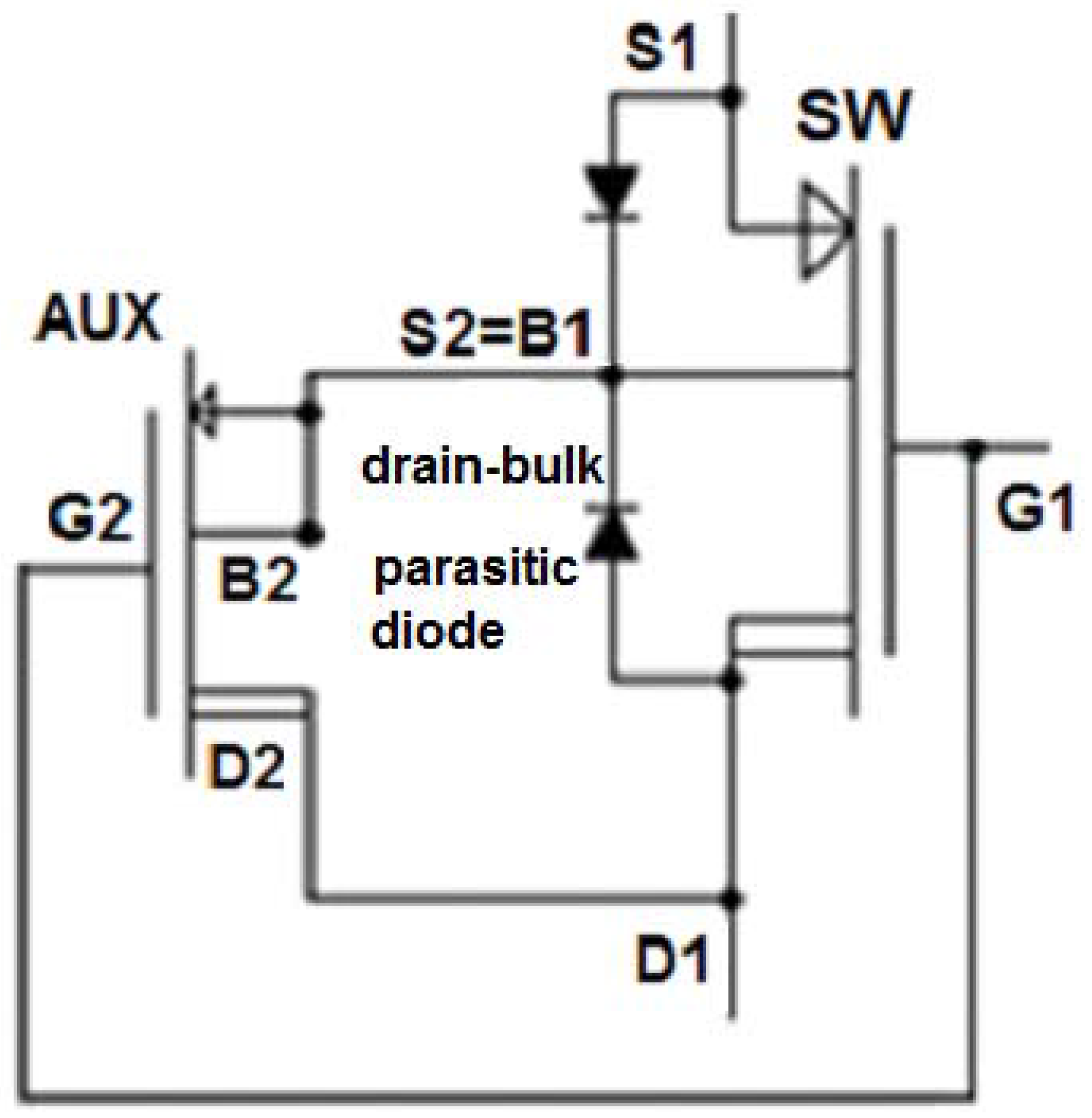
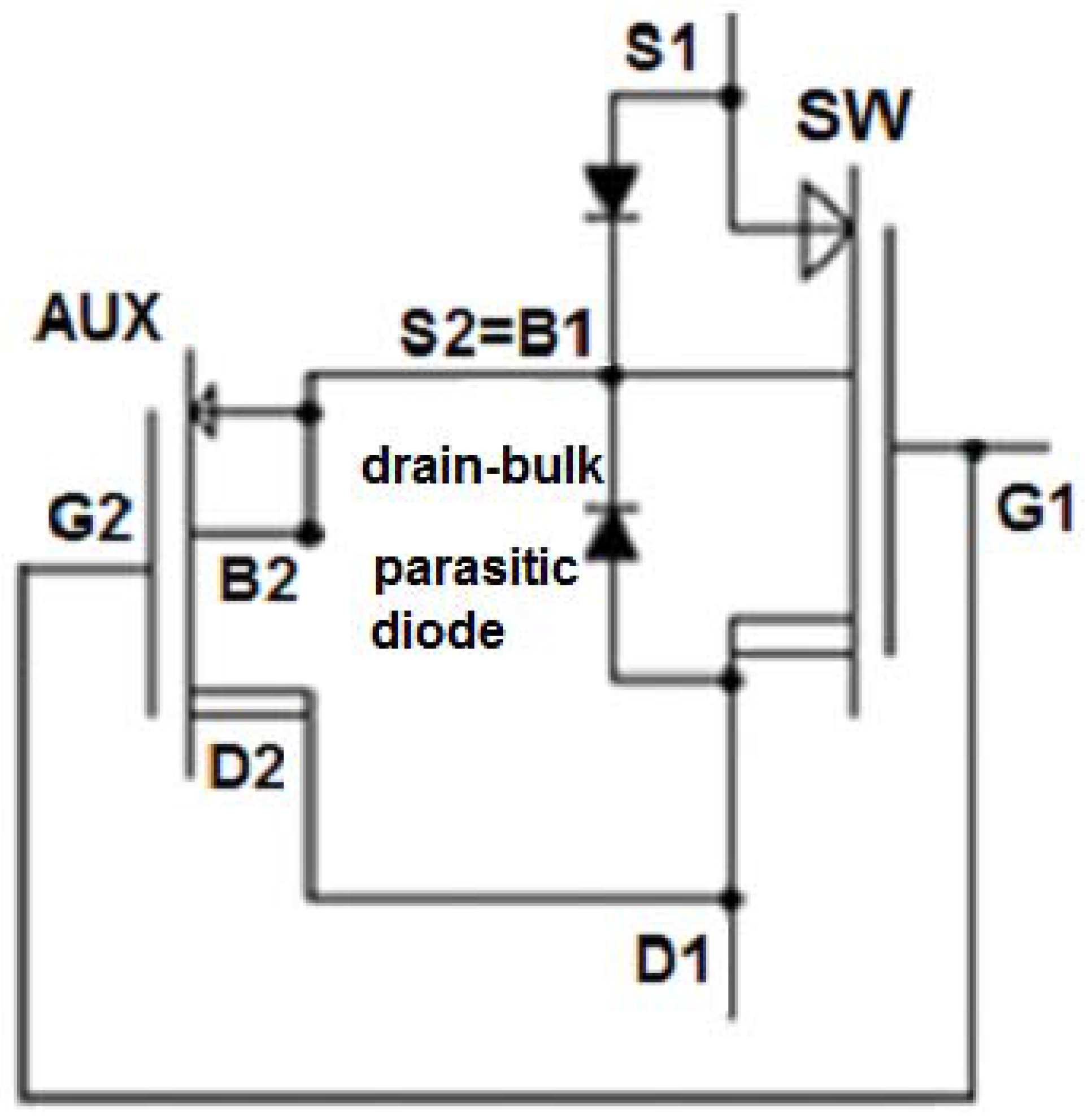
- (2)
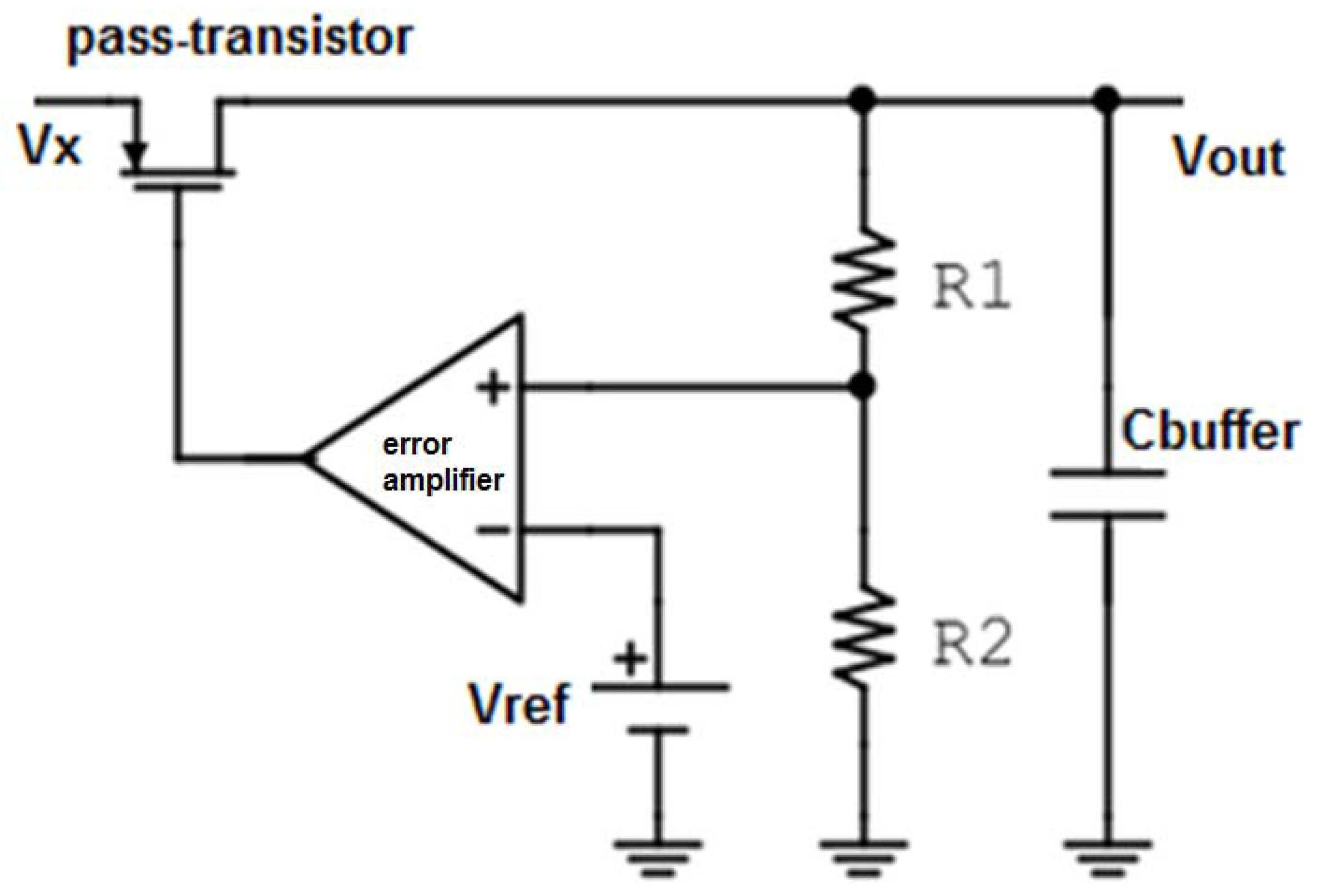
- When facing higher voltages, an LDMOS (Laterally Diffused Metal Oxide Semiconductor), available in the BCD technology, is used as switch. In the selected configuration (see in Figure 5 the case of a P-MOS switch) two MOS devices are used: one is the switching element (device SW in Figure 5), and the other is another device (AUX in Figure 5) that connects the bulk of the pass transistor SW to his drain to bypass the drain-bulk parasitic diode. Indeed, in Figure 5 if the bulk is connected at the source of the device SW, then during some transients the bulk can have a lower potential than the drain. In this case, the current can flow inside the drain-bulk parasitic diode and is not possible to turn OFF the MOS just driving the gate voltage. Furthermore, the parasitic BJT in each LDMOS may inject current in the substrate. This current injection, if not avoided, could have destructive effects. To avoid these issues the circuit with two MOS in Figure 5 may be used. In this circuit the gate driver is connected between the gate and the source of the SW pass transistor to handle its VGS. This way, when the gate driving signal is 0 V the gate is connected at the source of the SW device and the whole circuit acts as a diode configuration where VDG = VDS. The proposed solution differs from other approaches in literature where the diode configuration is made connecting the gate with the drain of a MOS device (VGS = VDS). In the considered application the used transistor should sustain VDS values of several tens of Volts but the gate-source junction of the LDMOS in the considered technology can sustain only few Volts. Instead, the diode configuration in Figure 5 is obtained connecting in the pass element SW the gate with the source. Being VDG = VDS the gate-source junction is protected from high voltages.
- (3)
- The voltage drop on some switches in the circuit, when the converter performs both step-down and step-up conversions, changes from positive to negative and vice versa. In this case a back-to-back circuit switch is needed, which is obtained putting in cascade two structures as in Figure 5, so four transistors are needed. The first stage is in the direction Drain to Source and the following stage is in the opposite direction Source to Drain.
3.2. Frequency Control
4. Implementation Results and Comparison to the State-of-the-Art
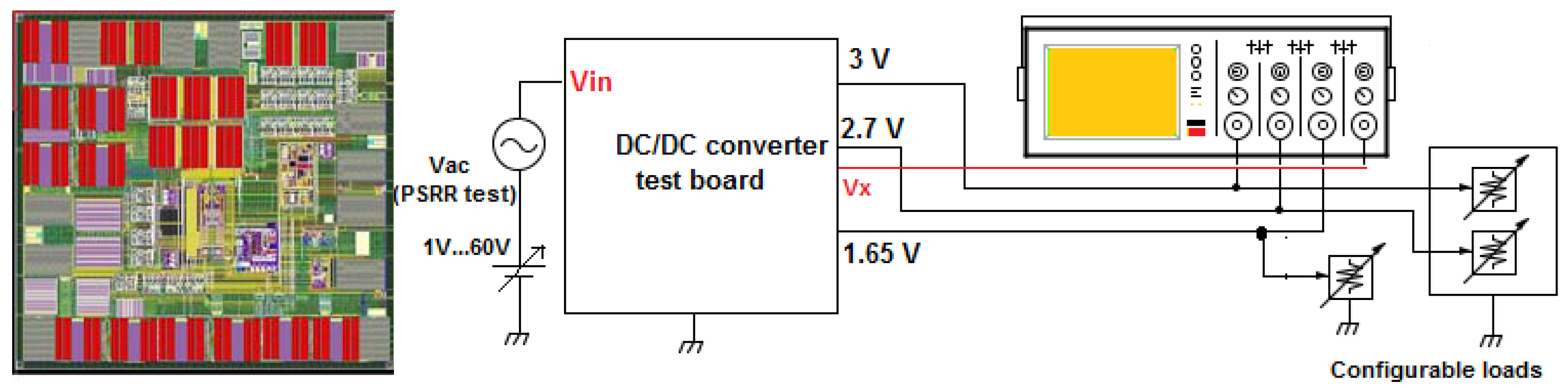
4.1. Implementation in BCD Technology
4.2. State-of-Art Comparison
- (1)
- The converter in this work is one of the few that avoid the use of cumbersome inductors, but at the same time is facing voltages up to 60 V. Instead, inductors are up tens of µH in state-of-the-art converters with the same input voltage range [94].
- (2)
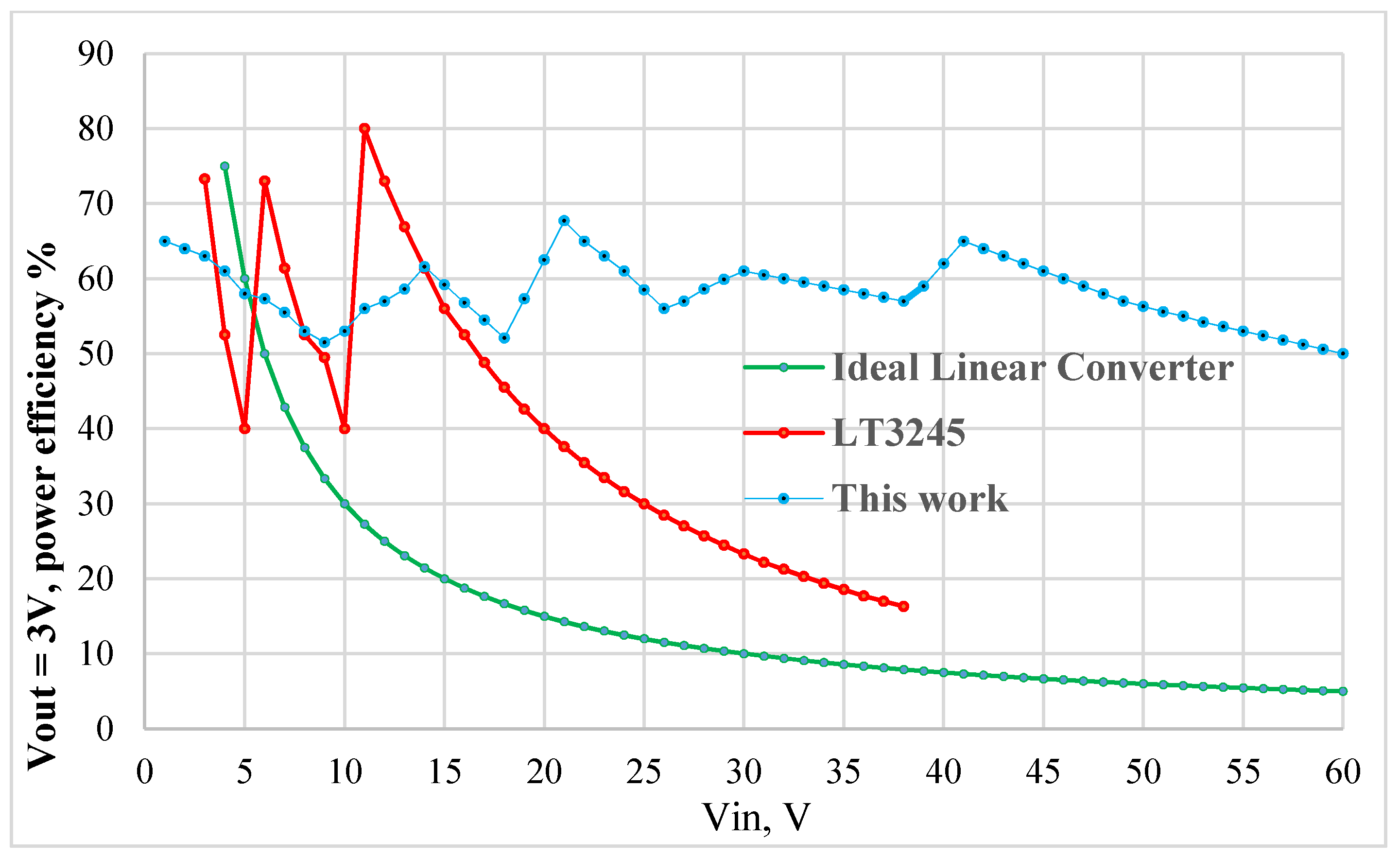
- With respect to other SC converters, the proposed design sustains a wider input range, from 1 V to 60 V. Instead, the LTC3245 DC/DC [96] converter addresses similar voltage and current levels of the load but is limited to min 2.7 V and to max 38 V. Other works are limited at a maximum input voltage of 42 V. Instead, the inductor-based PT4667 [94] switching converter needs at minimum a 36 V input. An inductorless regulator has been recently proposed in [88,90] but in this case the input voltage is at minimum 6 V and hence this converter is not suited for energy harvesting applications where the harvested power is available at very low voltages, ie. 1 V.
- (3)
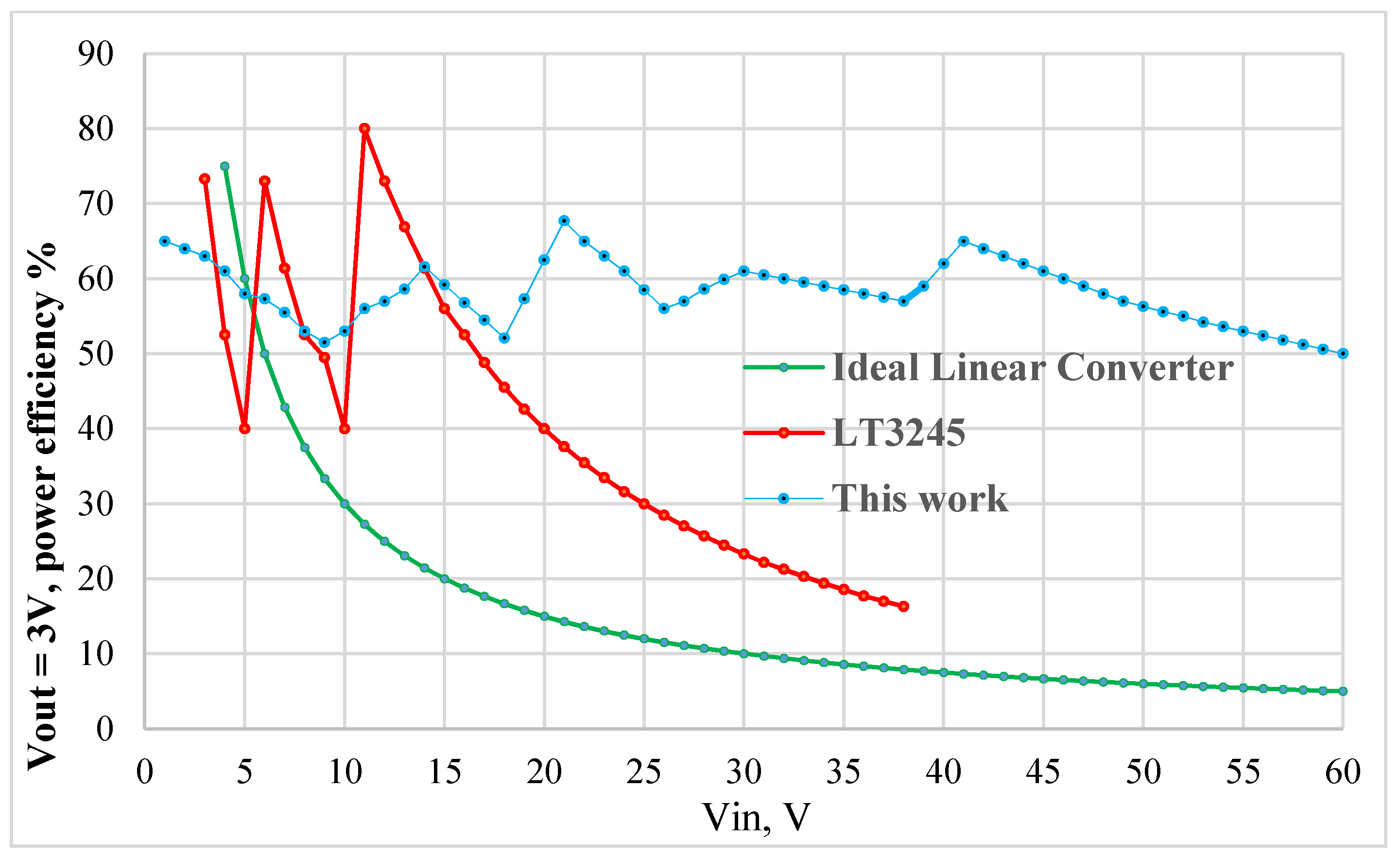
- With respect to the SC converter LTC3245 in [96], the proposed design achieves better efficiency for inputs above 15 V. Moreover, the LTC3245 SC converter can provide only outputs equal or above 2.5 V.
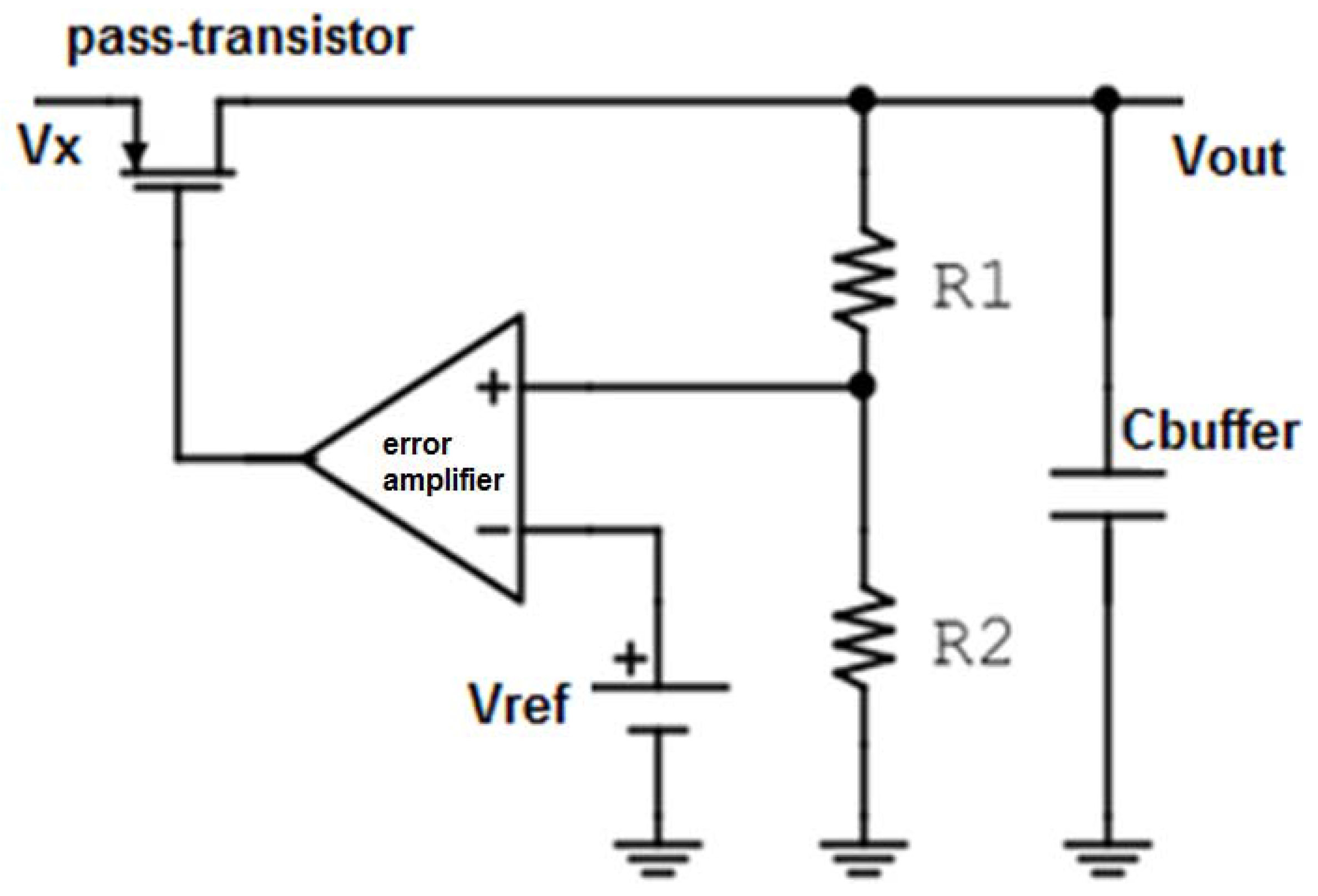
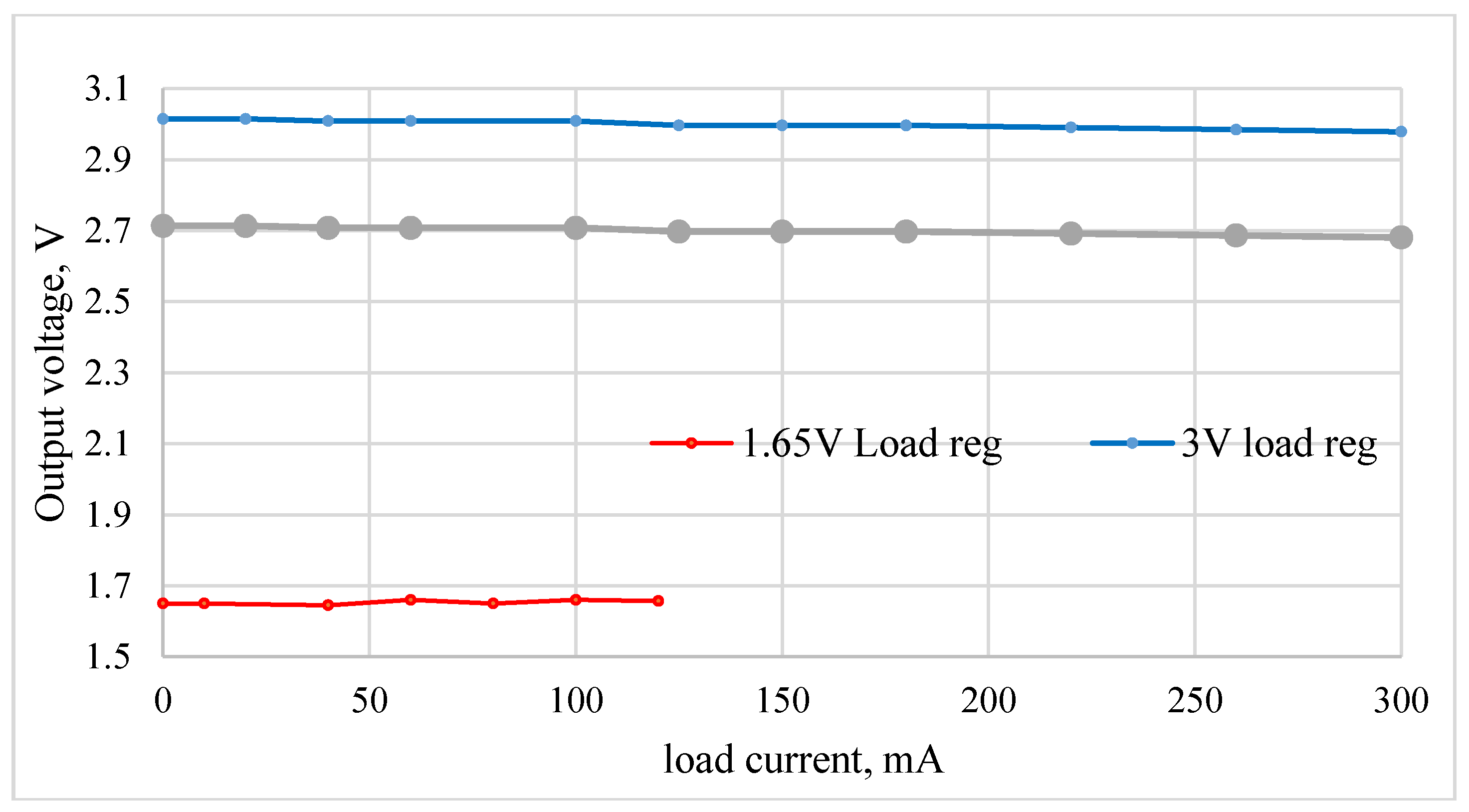
- (4)
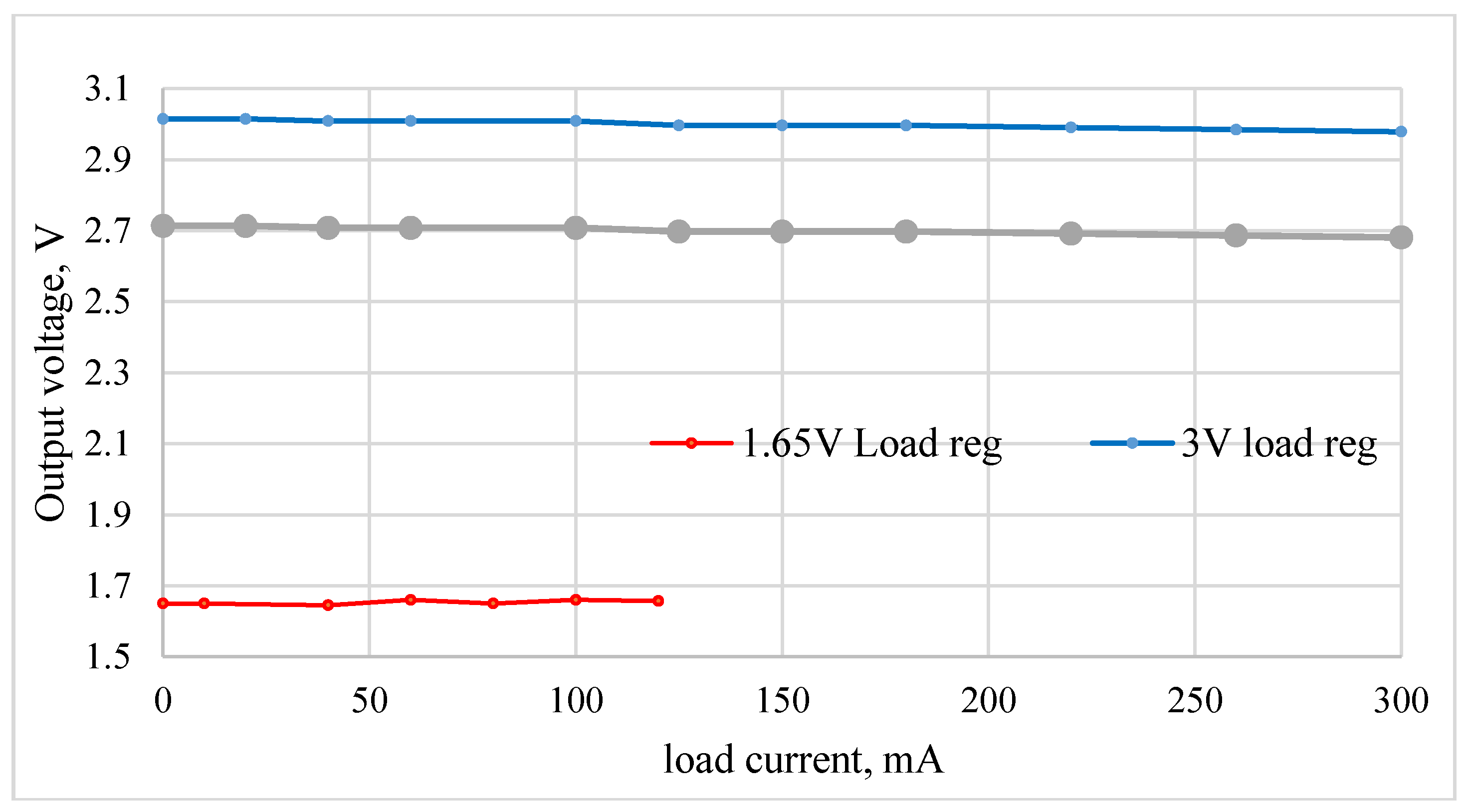
- The voltage change of this work, around the regulated output is ± 30 mV, while for the SC converter LTC3245 converter is ± 60 mV. The proposed design achieves a PSRR of −60 dB, thanks to on-chip linear converters at the last stage of the cascade. Other state-of-the-art switching converters such as [94,96] do not declare their PSRR and need an off-chip LDO regulator to reach values comparable to our design.
- (5)
- With respect to state-of-the-art inductor-based converters, regulating up to 60 V, e.g., PT4467 in [94], with an efficiency of 70% for load currents below 1 A, our design allows for a PCB saving of a factor ×5. Indeed the PCB of our converter can be realized with about 2 cm2 while the PT4467 requires at least 13 cm2.
- (6)
- Our design has been characterized to sustain a thermal range up to 150 °C, while the PT4467 is limited at 100 °C. Hence, the proposed converter is suited for both consumer or telecom applications and industrial and vehicles applications.
- (7)
- Beside inductors, the PT4667 converter in [94] requires also an off-chip 5 mF capacitor, while this work requires less than 1 μF capacitors. By avoiding the use of inductors/transformers, the proposed design also enables system-on-package implementations with an area occupation below 1 cm2, one order of magnitude lower than [94]. Indeed, in the proposed design trench capacitors are integrated in passive interposers, assembled in 3D fashion with the DC/DC converter chip.
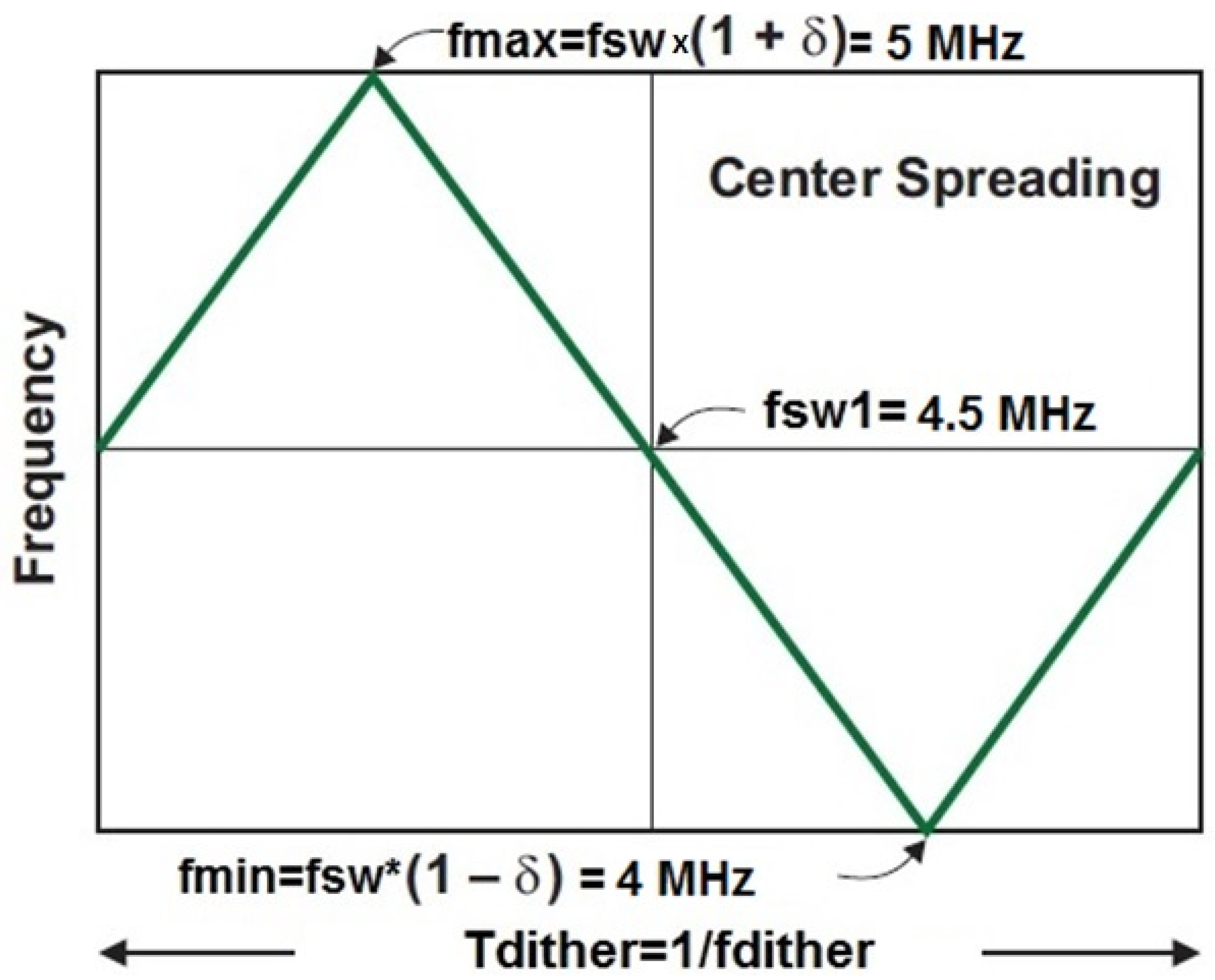
- (8)
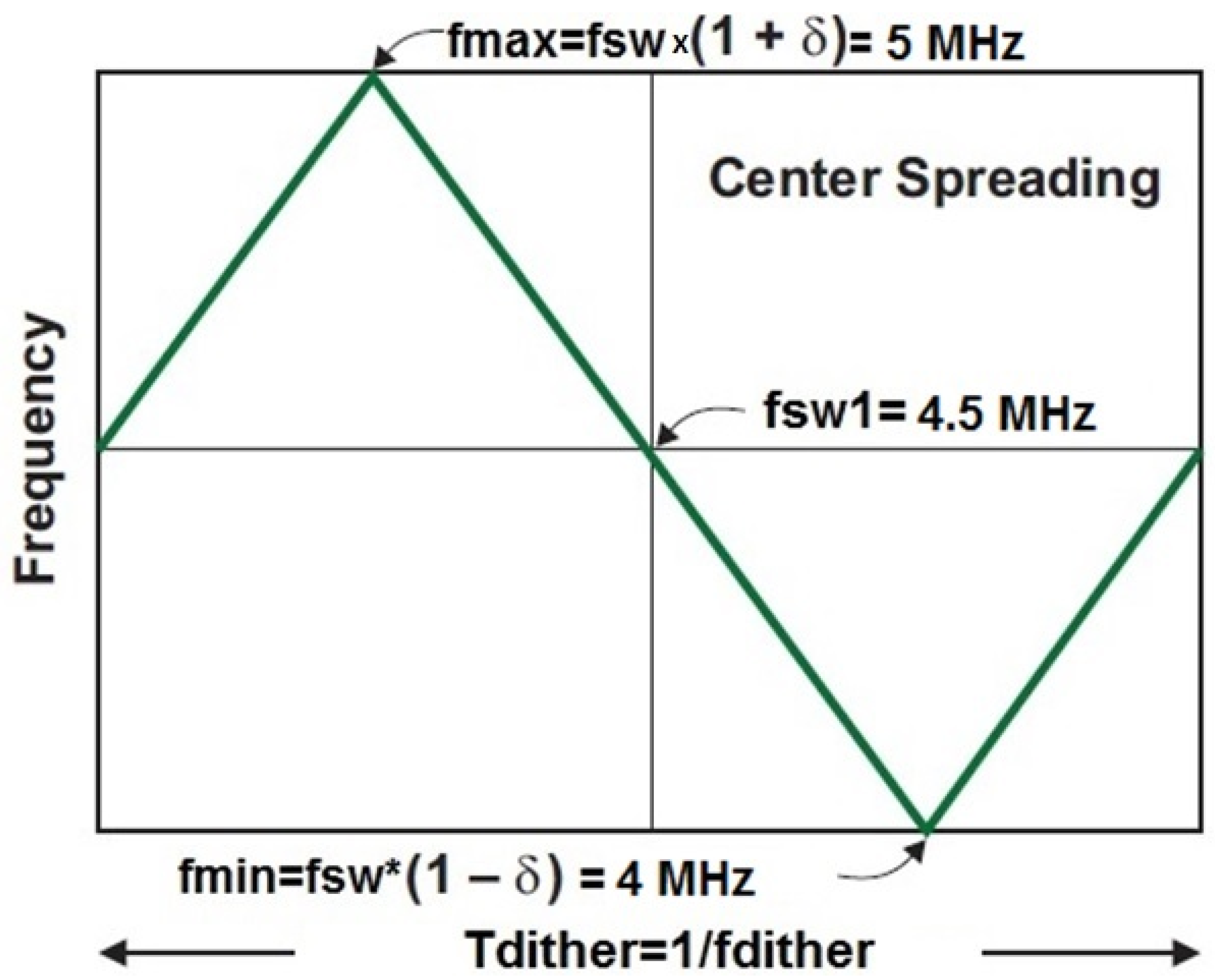
- The increase of the switching frequency, between 4 MHz and 5 MHz, see Figure 7, vs. the 90 kHz adopted in [88] reduces the ripple values on the signals inside the system and reduces also the conductive EMI due to request of input charge. An increase of the switching frequency leads to an increasing of the power to switch the MOS devices. However, the used devices have a low gate capacitance and so the efficiency losses due to this effect are negligible (about 50 µW vs. output power of about 1.8 W, of which 0.9 W for 300 mA at the 3 V output, 0.8 W for 300 mA at the 2.7 V output, 0.2 W for 120 mA at the 1.65 V output).
5. Conclusions
- (i)
- It can sustain a wide input voltage range from 1 V to 60 V. This way it is not optimized for a particular input voltage, but it can be used with changing input power sources, like power harvesting systems and/or very disturbed power supplies;
- (ii)
- It keeps power-efficiency levels up to 70% in the whole input range from 1 V to 60 V being more efficient than linear regulators and with comparable efficiency to inductor-based regulators;
- (iii)
- The converter avoids the use of inductors and, thanks to the adoption of a high switching frequency up to 5 MHz (much higher than the 100 kHz adopted by other works in state-of-art converters [88]), the only needed passive components are flying capacitors (whose size is below 10 nF) and buffer capacitors (whose size is below 100 nF). The total amount of passive devices to be integrated is less than 1 µF while in other works [88], switching around 100 kHz: this value is 50 times higher. Hence, the proposed converter can be integrated in a single chip (of 18 mm2 for the case study of three output voltages and 2 Watts of total load power), reducing area and assembly effort/cost vs. inductor-based DC/DC converters;
- (iv)
- It implements control techniques such as soft-start and dithering of the switching frequency to minimize the emission of electromagnetic interference and hence to ensure electromagnetic compatibility in IoT and CPS applications.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lee, E.A. CPS Foundations. In Proceedings of the 47th Design Automation Conference, Anaheim, CA, USA, 13–18 June 2010; pp. 737–742. [Google Scholar]
- Saponara, S.; Neri, B. Mm-wave integrated wireless transceiver: Enabling technology for high bandwidth short-range networking in cyber physical systems. Microsyst. Technol. 2016, 22, 1893–1903. [Google Scholar] [CrossRef]
- Sheng, Z.; Yang, S.; Yu, Y.; Vasilakos, A.V.; McCann, J.A.; Leung, K.K. A survey on the IETF protocol suite for the internet of things: standards, challenges, and opportunities. IEEE Wirel. Commun. 2013, 20, 91–98. [Google Scholar] [CrossRef]
- Saponara, S.; Giannetti, F.; Neri, B. Design exploration of mm-wave integrated transceivers for short-range mobile communications towards 5G. J. Circuits Syst. Comput. 2017, 26. [Google Scholar] [CrossRef]
- Wu, F.-J.; Kao, Y.-F.; Tseng, Y.-C. From wireless sensor networks towards cyber physical systems. Pervasive Mob. Comput. 2011, 7, 397–413. [Google Scholar] [CrossRef]
- Saponara, S.; Fanucci, L. VLSI design investigation for low-cost, low-power FFT/IFFT processing in advanced VDSL transceivers. Microelectron. J. 2003, 34, 133–148. [Google Scholar] [CrossRef]
- Lu, C.Y.; Saifullah, A.; Li, B.; Sha, M.; Gonzalez, H.; Gunatilaka, D.; Wu, C.; Nie, L.; Chen, Y. Real-time wireless control networks for Cyber-Physical Systems. Proc. IEEE 2016, 104, 1013–1024. [Google Scholar] [CrossRef]
- Lumpkins, W. The Internet of Things meets cloud computing. IEEE Consum. Electron. Mag. 2014, 2, 47–51. [Google Scholar] [CrossRef]
- Saponara, S.; Mattii, L.; Baronti, F.; Neri, B.; Fanucci, L. Design of a 2 Gb/s transceiver at 60 GHz with integrated antenna in bulk CMOS technology. In Proceedings of the 2014 9th European Microwave Integrated Circuit Conference, Rome, Italy, 6–7 October 2014; pp. 33–36. [Google Scholar]
- Andrews, J.; Buzzi, S.; Choi, W.; Hanly, S.V.; Lozano, A.; Soong, A.C.K.; Zhang, J.C. What will 5G be? IEEE J. Sel. Areas Commun. 2014, 32, 1065–1082. [Google Scholar] [CrossRef]
- Fonte, A.; Saponara, S.; Pinto, G.; Fanucci, L.; Neri, B. Design of a Low Noise Amplifier with integrated antenna for 60 GHz wireless communications. In Proceedings of the 2011 IEEE MTT-S International Microwave Workshop Series on Millimeter Wave Integration Technologies, Sitges, Spain, 15–16 September 2011; pp. 160–163. [Google Scholar]
- Fonte, A.; Saponara, S.; Pinto, G.; Neri, B. Feasibility study and on-chip antenna for fully integrated µRFID tag at 60 GHz in 65 nm CMOS SOI. In Proceedings of the 2011 IEEE International Conference on RFID-Technologies and Applications, Sitges, Spain, 15–16 September 2011; pp. 457–462. [Google Scholar]
- Fonte, A.; Saponara, S.; Pinto, G.; Fanucci, L.; Neri, B. 60-GHz single-chip integrated antenna and low noise amplifier in 65-nm CMOS SOI technology for short-range wireless Gbits/s applications. In Proceedings of the 2011 International Conference on Applied Electronics, Pilsen, Czech Republic, 7–8 September 2011; pp. 127–132, ISBN 978-1-4577-0315-7. [Google Scholar]
- Tsukizawa, T.; Shirakata, N.; Morita, T.; Tanaka, K.; Sato, J.; Morishita, Y.; Kanemaru, M.; Kitamura, R.; Shima, T.; Nakatani, T.; Miyanaga, K.; et al. A fully integrated 60 GHz CMOS transceiver chipset based on WiGig/IEEE802.11ad with built-in self-calibration for mobile applications. In Proceedings of the 2013 IEEE International Solid-State Circuits Conference Digest of Technical Papers, San Francisco, CA, USA, 17–21 February 2013; pp. 230–231. [Google Scholar] [CrossRef]
- Saponara, S.; Neri, B. Integrated 60 GHz Antenna, LNA and Fast ADC Architecture for Embedded Systems with Wireless Gbit Connectivity. J. Circuits Syst. Comput. 2012, 21. [Google Scholar] [CrossRef]
- Vaughan, J.S.N. Gigabit Wi-Fi is on its way. IEEE Comput. 2010, 43, 11–14. [Google Scholar] [CrossRef]
- Saponara, S.; Neri, B. Fully integrated 60 GHz transceiver for wireless HD/Wigig short-range multi-Gbit connections. Lect. Notes Electr. Eng. 2015, 351, 131–137. [Google Scholar] [CrossRef]
- Wean, J.; Zou, C.; Ullah, S.; Lai, C.-F.; Zhou, M.; Wang, X. Cloud-enabled wireless body area networks for pervasive healthcare. IEEE Network 2013, 27, 56–61. [Google Scholar] [CrossRef]
- Saponara, S.; Donati, M.; Fanucci, L.; Celli, A. An embedded sensing and communication platform, and a healthcare model for remote monitoring of chronic diseases. Electronics 2016, 5. [Google Scholar] [CrossRef]
- Riazul Islam, S.; Kwak, D.; Humaun Kabir, M.; Hossain, M.; Kwak, K.-S. The Internet of Things for health care: a comprehensive survey. IEEE Access 2015, 3. [Google Scholar] [CrossRef]
- Fanucci, L.; Saponara, S.; Bacchillone, T.; Donati, M.; Barba, P.; Sánchez-Tato, I.; Carmona, C. Sensing devices and sensor signal processing for remote monitoring of vital signs in CHF patients. IEEE Trans. Instrum. Meas. 2013, 62, 553–569. [Google Scholar] [CrossRef]
- Sun, J.; Konishi, H.; Ogino, Y.; Nakaoka, M. Series resonant high-voltage ZCS-PFM DC-DC converter for medical power electronics. In Proceedings of the 2000 IEEE 31st Annual Power Electronics Specialists Conference, Galway, Ireland, 23–23 June 2000. [Google Scholar] [CrossRef]
- Saponara, S.; Donati, M.; Bacchillone, T.; Sánchez-Tato, I.; Carmona, C.; Fanucci, L.; Barba, P. Remote monitoring of vital signs in patients with chronic heart failure: Sensor devices and data analysis perspective. In Proceedings of the 2012 IEEE Sensors Applications Symposium, Brescia, Italy, 7–9 February 2012; pp. 155–160. [Google Scholar] [CrossRef]
- Libin, G.; Gargiulo, G.D.; Lehmann, T.; Hamilton, T.J. A 0.04 mm2 Buck-Boost DC-DC Converter for Biomedical Implants Using Adaptive Gain and Discrete Frequency Scaling Control. IEEE Trans. Biomed. Circ. Syst. 2016, 10, 668–678. [Google Scholar] [CrossRef]
- Donati, M.; Celli, A.; Benini, A.; Fanucci, L.; Saponara, S. Enabling technologies for the In-house monitoring of vital signs in chronic patients. Lect. Notes Electr. Eng. 2017, 409, 93–99. [Google Scholar] [CrossRef]
- Volker, D.; Huebner, M.; Selbeck, J. Precise Navigation of Small Agricultural Robots in Sensitive Areas with a Smart Plant Camera. J. Imaging 2015, 1, 115–133. [Google Scholar] [CrossRef]
- Costantino, N.; Borgese, G.; Saponara, S.; Fanucci, L.; Incandela, J.; Magazzù, G. Development, design and characterization of a novel protocol and interfaces for the control and readout of front-end electronics in high energy physics experiments. IEEE Trans. Nucl. Sci. 2013, 60, 352–364. [Google Scholar] [CrossRef]
- Gerla, M.; Lee, E.; Pau, G.; Lee, U. Internet of vehicles: From intelligent grid to autonomous cars and vehicular clouds. In Proceedings of the 2014 IEEE World Forum on Internet of Things (WF-IoT), Seoul, Korea, 6–8 March 2014. [Google Scholar] [CrossRef]
- Marsi, S.; Saponara, S. Integrated video motion estimator with Retinex-like pre-processing for robust motion analysis in automotive scenarios: algorithmic and real-time architecture design. J. Real-Time Image Process. 2010, 5, 275–289. [Google Scholar] [CrossRef]
- Dimitrakopoulos, G. Intelligent transportation systems based on internet-connected vehicles: Fundamental research areas and challenges. In Proceedings of the 2011 11th International Conference on ITS Telecommunications, St. Petersburg, Russia, 23–25 August 2011; ISBN 978-1-61284-671-2. [Google Scholar]
- Saponara, S.; Petri, E.; Fanucci, L.; Terreni, P. Sensor modeling, low-complexity fusion algorithms, and mixed-signal IC prototyping for gas measures in low-emission vehicles. IEEE Trans. Instrum. Meas. 2011, 60, 372–384. [Google Scholar] [CrossRef]
- Bilgin, B.; Magne, P.; Malysz, P.; Yang, Y.; Pantelic, V.; Preindl, M.; Korobkine, A.; Jiang, W.; Lawford, M.; Emadi, A. Making the case for electrified transportation. IEEE Trans. Transp. Electrification 2015, 1, 4–17. [Google Scholar] [CrossRef]
- Saponara, S.; Tonarelli, L.F.M.; Petri, E. Radiation tolerant Space Wire router for satellite on-board networking. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 3–12. [Google Scholar] [CrossRef]
- de Sanctis, M.; Cianca, E.; Araniti, G.; Bisio, I.; Prasad, R. Satellite communications supporting internet of remote things. IEEE Internet Things J. 2016, 3, 113–123. [Google Scholar] [CrossRef]
- Saponara, S.; Casarosa, G.; Hambloch, P.; Ciuchi, F.; Fanucci, L.; Sarti, B. Modeling, sensitivity analysis, and prototyping of low-g acceleration acquisition systems for spacecraft testing and environmental-noise measurements. IEEE Trans. Instrum. Meas. 2011, 60, 385–397. [Google Scholar] [CrossRef]
- Dey, S.; Roy, A.; Das, S. Home automation using Internet of Thing. In Proceedings of the 2016 IEEE 7th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 20–22 October 2016. [Google Scholar] [CrossRef]
- Saponara, S.; Bacchillone, T. Network architecture, security issues, and hardware implementation of a home area network for smart grid. J. Comput. Networks Commun. 2012, 2012, 1–19. [Google Scholar] [CrossRef]
- Keramidas, G.; Antonopoulos, C.; Voros, N.S.; Schwiegelshohn, F.; Wehner, P.; Rettkowski, J.; Göhringer, D.; Hübner, M.; Konstantopoulos, S.; Giannakopoulos, T.; et al. Computation and communication challenges to deploy robots in assisted living environments. In Proceedings of the 2016 Design, Automation & Test in Europe Conference & Exhibition (DATE), Dresden, Germany, 14–18 March 2016; ISBN 978-3-9815-3707-9. [Google Scholar]
- Baronti, F.; Lazzeri, A.; Roncella, R.; Saletti, R.; Saponara, S. Design and characterization of a Robotized gearbox system based on voice coil actuators for a formula SAE race Car. IEEE/ASME Trans. Mechatron. 2013, 18, 53–61. [Google Scholar] [CrossRef]
- Marzabad, M.; Moghaddam, M.M.; Akorede, M.F.; Khomeyrani, G. Adaptive load shedding scheme for frequency stability enhancement in microgrids. Electr. Power Syst. Res. 2016, 140. [Google Scholar] [CrossRef]
- Chimienti, A.; Fanucci, L.; Locatelli, R.; Saponara, S. VLSI architecture for a low-power video codec system. Microelectron. J. 2002, 33, 417–427. [Google Scholar] [CrossRef]
- Schulz, W. ETSI standards and guides for efficient powering of telecommunication and datacom. In Proceedings of the INTELEC 07—29th International Telecommunications Energy Conference, Rome, Italy, 30 September–4 October 2007. [Google Scholar] [CrossRef]
- Saponara, S.; Neri, B. Radar sensor signal acquisition and multidimensional FFT processing for surveillance applications in transport systems. IEEE Trans. Instrum. Meas. 2017, 66, 604–615. [Google Scholar] [CrossRef]
- Ray, P.P. Internet of Things for Sports (IoTSport): An architectural framework for sports and recreational activity. In Proceedings of the 2015 International Conference on Electrical, Electronics, Signals, Communication and Optimization (EESCO), Visakhapatnam, India, 24–25 January 2015. [Google Scholar] [CrossRef]
- Saponara, S. Wearable biometric performance measurement system for combat sports. IEEE Trans. Instrum. Meas. 2017, 1–11. [Google Scholar] [CrossRef]
- Marzabad, M.; Ardeshiri, R.R.; Moafi, M.; Uppal, H. Distributed generation for economic benefit maximization through coalition formation based on game theory concept. Int. Trans. Electr. Energy Syst. 2017, 1–16. [Google Scholar] [CrossRef]
- Marzabad, M.; Ghazimirsaeid, S.S.; Uppal, H.; Terrence, F. A real-time evaluation of energy management systems for smart hybrid home Microgrids. Electr. Power Syst. Res. 2017, 143, 624–633. [Google Scholar] [CrossRef]
- Saponara, S.; Fanucci, L.; Bernardo, F.; Falciani, A. Predictive diagnosis of high-power transformer faults by networking vibration measuring nodes with integrated signal processing. IEEE Trans. Instrum. Meas. 2016, 65, 1749–1760. [Google Scholar] [CrossRef]
- Marzabad, M.; Yousefnejad, E.; Sumper, A.; Domínguez-García, J.L. Real Time Experimental Implementation of Optimum Energy Management System in Standalone Microgrid by Using Multi-layer Ant Colony Optimization. Int. J. Electr. Power Energy Syst. 2016, 75, 265–274. [Google Scholar] [CrossRef]
- Marzabad, M.; Parhizi, N.; Savaghebi, M.; Guerrero, J.M. Distributed Smart Decision-Making for a Multi-microgrid System Based on a Hierarchical Interactive Architecture. IEEE Trans. Energy Convers. 2016, 31, 637–648. [Google Scholar] [CrossRef]
- Saponara, S.; Martina, M.; Casula, M.; Fanucci, L.; Masera, G. Motion estimation and CABAC VLSI co-processors for real-time high-quality H.264/AVC video coding. Microprocess. Microsyst. 2010, 34, 316–328. [Google Scholar] [CrossRef]
- Saponara, S.; Denolf, K.; Lafruit, G.; Blanch, C.; Bormans, J. Performance and Complexity Co-evaluation of the Advanced Video Coding Standard for Cost-Effective Multimedia Communications. EURASIP J. Appl. Signal Process. 2004, 2004, 220–235. [Google Scholar] [CrossRef]
- Shifa, A.; Asghar, M.N.; Fleury, M. Multimedia security perspectives in IoT. In Proceedings of the 2016 Sixth International Conference on Innovative Computing Technology (INTECH), Dublin, Ireland, 24–26 August 2016. [Google Scholar] [CrossRef]
- Saponara, S.; Casula, M.; Rovati, F.; Alfonso, D.; Fanucci, L. Dynamic control of motion estimation search parameters for low complex H.264 video coding. IEEE Trans. Consum. Electron. 2006, 52, 232–239. [Google Scholar] [CrossRef]
- Alvi, S.A.; Afzal, B.; Shah, G.A.; Atzori, L.; Mahmood, W. Internet of Multimedia Things: Vision and Challenges. Ad Hoc Networks 2015, 33, 87–111. [Google Scholar] [CrossRef]
- Saponara, S.; Fanucci, L.; Marsi, S.; Ramponi, G. Algorithmic and architectural design for real-time and power-efficient Retinex image/video processing. J. Real-Time Image Process. 2007, 1, 267–283. [Google Scholar] [CrossRef]
- Zhou, L.; Chen, M.; Zheng, B.; Cui, J. Green multimedia communications over Internet of Things. In Proceedings of the 2012 IEEE International Conference on Communications (ICC), Ottawa, ON, Canada, 10–15 June 2012. [Google Scholar] [CrossRef]
- Genovesi, S.; Saponara, S.; Monorchio, A. Parametric Design of Compact Dual-Frequency Antennas for Wireless Sensor Networks. IEEE Trans. Antennas Propag. 2011, 59, 2619–2627. [Google Scholar] [CrossRef]
- Gambini, S.; Crossley, J.; Alon, E.; Rabaey, J.M. A Fully integrated 290 pJ/bit UWB dual-mode transceiver for cm-range wireless interconnects. IEEE J. Solid-Sate Circuits 2012, 47, 586–598. [Google Scholar] [CrossRef]
- Genovesi, S.; Monorchio, A.; Saponara, S. Compact Triple-Frequency Antenna for Sub-GHz Wireless Communications. IEEE Antennas Wirel. Propag. Lett. 2012, 11, 14–17. [Google Scholar] [CrossRef]
- Genovesi, S.; Monorchio, A.; Saponara, S. Double-loop antenna for wireless tyre pressure monitoring. Electron. Lett. 2008, 44, 1385–1387. [Google Scholar] [CrossRef]
- Yilmaz, T.; Gokkoca, G.; Akan, O.B. Millimetre Wave Communication for 5G IoT Applications. In Internet of Things (IoT) in 5G Mobile Technologies; Springer: Cham, Switzerland, 2016; pp. 37–53. [Google Scholar] [CrossRef]
- Saponara, S.; Giannetti, F.; Neri, B. Design exploration for millimeter-wave short-range industrial wireless communications. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 6038–6043. [Google Scholar] [CrossRef]
- Saponara, S.; Giannetti, F.; Neri, B.; Anastasi, G. Exploiting mm-wave communications to boost the performance of industrial wireless networks. IEEE Trans. Ind. Inf. 2017, 1–11. [Google Scholar] [CrossRef]
- Salato, M. Re-architecting 48 V power system with a novel non-isolated bus converter. In Proceedings of the 2015 IEEE International Telecommunications Energy Conference (INTELEC), Osaka, Japan, 18–22 October 2015. [Google Scholar] [CrossRef]
- Saponara, S.; Pasetti, G.; Costantino, N.; Tinfena, F.; D’Abramo, P.; Fanucci, L. A Flexible LED Driver for Automotive Lighting Applications: IC Design and Experimental Characterization. IEEE Trans. Power Electron. 2012, 27, 1071–1075. [Google Scholar] [CrossRef]
- Costantino, N.; Serventi, R.; Tinfena, F.; D’abramo, P.; Chassard, P.; Tisserand, P.; Saponara, S.; Fanucci, L. Design and test of an HV-CMOS intelligent power switch with integrated protections and self-diagnostic for harsh automotive applications. IEEE Trans. Ind. Electron. 2011, 58, 2715–2727. [Google Scholar] [CrossRef]
- Wirasingha, S.G.; Khan, M.; Gross, O. 48 V electrification belt driven starter generator systems. In Advanced Electric Drive Vehicles; Emadi, A., Ed.; Chapter 10; CRC Press: Boca Raton, FL, USA, 2015; ISBN 978-1-4665-9770-9. [Google Scholar] [CrossRef]
- Saponara, S.; Fanucci, L.; Marsi, S.; Ramponi, G.; Kammler, D.; Witte, E.M. Application-specific instruction-set processor for retinex-like image and video processing. IEEE Trans. Circuits Syst. II 2007, 54, 596–600. [Google Scholar] [CrossRef]
- Saponara, S.; Nuzzo, P.; Nani, C.; van der Plas, G.; Fanucci, L. Architectural exploration and design of time-interleaved SAR arrays for low-power and high speed A/D converters. IEICE Trans. Electron. 2009, 92, 843–851. [Google Scholar] [CrossRef]
- Turturici, M.; Saponara, S.; Fanucci, L.; Franchi, E. Low-power DSP system for real-time correction of fish-eye cameras in automotive driver assistance applications. J. Real-Time Image Process. 2014, 9, 463–478. [Google Scholar] [CrossRef]
- Nan, C.; Ayyanar, R. A 1 MHz bi-directional soft-switching DC-DC converter with planar coupled inductor for dual voltage automotive systems. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 20–24 March 2016. [Google Scholar] [CrossRef]
- Chen, M.; Li, K.; Hu, J.; Ioinovici, A. Generation of a family of very high DC gain power electronics circuits based on switched-capacitor-inductor cells starting from a simple graph. IEEE Trans. Circuits Syst. I 2016, 63. [Google Scholar] [CrossRef]
- Saponara, S.; Li, K.; Hu, J.; Ioinovici, A. Hard macrocells for DC/DC converter in automotive embedded mechatronic systems. EURASIP J. Embedded Syst. 2017, 2017, 1–13. [Google Scholar] [CrossRef]
- Burghartz, J.N.; Rejaei, B. On the Design of RF Spiral Inductors on Silicon. IEEE Trans. Electron. Devices 2003, 50, 718–729. [Google Scholar] [CrossRef]
- Ragonese, E.; Scuderi, A.; Biondi, T.; Palmisano, G. Integrated Inductors and Transformers: Characterization, Design and Modeling for RF and MM-Wave Applications; CRC Press: Boca Raton, FL, USA, 2010; 169 p, ISBN 978-1-4200-8844-1. [Google Scholar]
- Cheah, M.; Mandal, D.; Bakkaloglu, B.; Kiaei, S. A 100-mA, 99.11% current efficiency, 2-mVpp ripple digitally controlled LDO with active ripple suppression. IEEE Trans. VLSI Syst. 2017, 25, 696–704. [Google Scholar] [CrossRef]
- Saponara, S. Integrated Bandgap Voltage Reference for High Voltage Vehicle Applications. J. Circuits Syst. Comput. 2015, 24. [Google Scholar] [CrossRef]
- Shirmohammadil, V.; Saberkari, A.; Martínez-García, H.; Alarcón-Cot, E. LDO-assisted vs. Linear-assisted DC/DC converters: A comprehensive study and comparison. In Proceedings of the 2016 IEEE International Conference on Electronics, Circuits and Systems (ICECS), Monte Carlo, Monaco, 11–14 December 2016. [Google Scholar] [CrossRef]
- Saponara, S.; Fanucci, L.; Baldetti, T.; Pardi, E. Bandgap Voltage Reference IC for HV Automotive Applications with Pseudo-regulated Bias and Service Regulator. J. Circuits Syst. Comput. 2013, 22, 1–16. [Google Scholar] [CrossRef]
- Jafari, M.; Hunter, G.; Zhu, J.G. A new topology of multi-input multi-output buck-boost DC-DC converter for microgrid applications. In Proceedings of the 2012 IEEE International Conference on Power and Energy (PECon), Kota Kinabalu, Malaysia, 2–5 December 2012. [Google Scholar] [CrossRef]
- Seeman, M.D.; Sanders, S.R. Analysis and Optimization of Switched-Capacitor DC-DC Converters. IEEE Trans. Power Electron. 2008, 23. [Google Scholar] [CrossRef]
- Hwang, Y.-S.; Chou, H.-H.; Chang, Y.-B.; Chen, J.-J. A high-efficiency DC-DC converter with wide output range using switched-capacitor front-end techniques. IEEE Trans. Ind. Electron. 2014, 61, 2244–2250. [Google Scholar] [CrossRef]
- Maity, B.; Mandal, P. A High performance switched capacitor-based DC-DC buck converter suitable for embedded power management applications. IEEE Trans. VLSI Syst. 2012, 20, 1880–1885. [Google Scholar] [CrossRef]
- Zhou, P.; Ayan, P.; Kim, C.H.; Sapatnekar, S.S. Distributed on-chip switched-capacitor DC–DC converters supporting DVFS in multicore systems. IEEE Trans. VLSI Syst. 2014, 22, 1954–1967. [Google Scholar] [CrossRef]
- de Vos, J.; Flandre, D.; Bol, D. A sizing methodology for on-chip switched-capacitor DC/DC converters. IEEE Trans. Circuits Syst. I 2014, 61, 1597–1606. [Google Scholar] [CrossRef]
- Jiang, J.; Lu, Y.; Ki, W.-H. A digitally-controlled 2-/3-phase 6-ratio switched capacitor DC-DC converter with adaptive ripple reduction and efficiency improvements. In Proceedings of the ESSCIRC Conference 2016: 42nd European Solid-State Circuits Conference, Lausanne, Switzerland, 12–15 September 2016. [Google Scholar] [CrossRef]
- Saponara, S.; Ciarpi, G.; Mattaliano, C.; Fanucci, L.; Groza, V. Improving electromagnetic compatibility of integrated switching converters for hybrid/electric vehicles. In Proceedings of the 2016 IEEE Electrical Power and Energy Conference (EPEC), Ottawa, ON, Canada, 12–14 October 2016. [Google Scholar] [CrossRef]
- Hwang, Y.-S.; Liu, A.; Ku, Y.-T.; Chang, Y.-B.; Chen, J.-J. A fast transient response flying-capacitor buck–boost converter utilizing pseudocurrent dynamic acceleration techniques. IEEE Trans. VLSI Syst. 2015, 23, 1155–1159. [Google Scholar] [CrossRef]
- Zanwar, M.; Sen, S. CMOS multi-phase switched capacitor step-up DC-DC converter. In Proceedings of the 2016 IEEE International Conference on the Science of Electrical Engineering (ICSEE), Eilat, Israel, 16–18 November 2016. [Google Scholar] [CrossRef]
- Saponara, S.; Tisserand, P.; Chassard, P.; My-Ton, D. DC/DC converter integrated architecture for 48 V supplies in micro/mild hybrid vehicle electrical engine control module. In Proceedings of the 2016 IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Makowski, M.S.; Maksimovic, D. Performance limits of Switched Capacitors DC-DC Converters. IEEE Power Electronics Specialist Conference. In Proceedings of the PESC '95 Record: 26th Annual IEEE Power Electronics Specialists Conference, Atlanta, GA, USA, 18–22 June 1995. [Google Scholar] [CrossRef]
- Zhang, F.; Du, L.; Peng, F.Z.; Qian, Z. A new design method for high-power high-efficiency switched-capacitor DC–DC converters. IEEE Trans. Power Electron. 2008, 23, 832–840. [Google Scholar] [CrossRef]
- Texas Instruments. PT4660 Series, 30-A Dual Output Isolated DC/DC Converter, SLTS140C; Texas Instruments: Dallas, TX, USA, October 2003.
- Ferro, E.; Brea, V.M.; López, P.; Cabello, D. Dynamic model of switched-capacitor DC-DC converters in the slow-switching limit including charge reusing. IEEE Trans. Power Electron. 2017. [Google Scholar] [CrossRef]
- Barbehennm, G.H. 2.7 V to 38 V VIN Range, Low noise, 250 mA Buck-Boost Charge Pump Converter. LT J. Analog Inn. 2014, pp. 9–14. Available online: http://cds.linear.com/docs/en/lt-journal/LTJournal-V23N4-2014-01.pdf (accessed on 9 April 2017).
- Martin, A. AN-2162 Simple Success with Conducted EMI from DC-DC Converters; Application Report SNVA489C; Texas Instruments: Dallas, TX, USA, April 2013. [Google Scholar]
- Wachmann, E.; Saponara, S.; Zambelli, C.; Tisserand, P.; Charbonnier, J.; Erlbacher, T.; Gruenler, S.; Hartler, C.; Siegert, J.; Chassard, P.; et al. ATHENIS 3D: Automotive Tested High-voltage and Embedded Non-volatile Integrated SoC platform with 3D technology. In Proceedings of the 2016 Design, Automation Test in Europe Conference Exhibition (DATE), Dresden, Germany, 14–18 March 2016; pp. 894–899, ISBN 978-398153706-2. [Google Scholar]
- Banzhaf, S.; Schwaiger, S.; Erlbacher, T.; Bauer, A.J.; Frey, L. Post-trench processing of silicon deep trench capacitors for power electronic applications. In Proceedings of the 2016 28th International Symposium on Power Semiconductor Devices and ICs (ISPSD), Prague, Czech Republic, 12–16 June 2016. [Google Scholar] [CrossRef]
- Brunel, C.; Lengignon, L. Silicon capacitors with extremely high stability and reliability ideal for high temperature applications. In Proceedings of the HiTEC 2012, Baltimore, MD, USA, 25–28 June 2012. [Google Scholar] [CrossRef]
- Bacciarelli, L.; Lucia, G.; Saponara, S.; Fanucci, L.; Forliti, M. Design, testing and prototyping of a software programmable I2C/SPI IP on AMBA bus. In Proceedings of the 2006 Ph.D. Research in Microelectronics and Electronics, Otranto, Italy, 12–15 June 2006; pp. 373–376. [Google Scholar] [CrossRef]
- Ho, R.; Mai, K.; Horowitz, M. The future of wires. Proc. IEEE 2001, 89, 490–504. [Google Scholar] [CrossRef]
- Vitullo, F.; L’Insalata, N.E.; Petri, E.; Saponara, S.; Fanucci, L.; Casula, M.; Locatelli, R.; Coppola, M. Low-complexity link microarchitecture for mesochronous communication in Networks-on-Chip. IEEE Trans. Comput. 2008, 57, 1196–1201. [Google Scholar] [CrossRef]
- Jiang, G.; Li, Z.; Wang, F.; Wei, S. A low-latency and low-power hybrid scheme for on-chip networks. IEEE Trans. VLSI Syst. 2015, 23, 664–677. [Google Scholar] [CrossRef]
- Saponara, S.; Bacchillone, T.; Petri, E.; Fanucci, L.; Locatelli, R.; Coppola, M. Design of an NoC interface macrocell with hardware support of advanced networking functionalities. IEEE Trans. Comput. 2014, 63, 609–621. [Google Scholar] [CrossRef]
- Janßen, B.; Schwiegelshohn, F.; Hübner, M. Designing Applications for Heterogeneous Many-Core Architectu-res with the FlexTiles Platform. In Proceedings of the 2015 International Conference on Embedded Computer Systems: Architectures, Modeling, and Simulation (SAMOS), Samos, Greece, 19–23 July 2015. [Google Scholar] [CrossRef]
- Sisto, A.; Pilato, L.; Serventi, R.; Saponara, S.; Fanucci, L. Application specific instruction set processor for sensor conditioning in automotive applications. Microprocess. Microsyst. 2016, 47, 375–384. [Google Scholar] [CrossRef]
- Kumaran, S.K.; Santha, K.R. DSP control of DC/DC boost converter for fuel cell based hybrid electric vehicle. In Proceedings of the International Conference on Advances in Engineering, Science and Management (ICAESM), Nagapattinam, Tamil Nadu, India, 30–31 March 2012; pp. 409–414, ISBN 978-1-4673-0213-5. [Google Scholar]
- Saponara, S.; Fanuci, L.; Terreni, P. Architectural-level Power Optimization of Microcontroller Cores in Embedded Systems. IEEE Trans. Ind. Electron. 2007, 54, 680–683. [Google Scholar] [CrossRef]
- Goossens, G.; Lanneer, D.; Geurts, W.; van Praet, J. Design of asips in multi-processor socs using the chess/checkers retargetable tool suite. In Proceedings of the 2006 International Symposium on System-on-Chip, Tampere, Finland, 13–16 November 2006. [Google Scholar] [CrossRef]
- Saponara, S.; Pasetti, G.; Tinfena, F.; Fanucci, L.; D’Abramo, P. HV-CMOS design and characterization of a smart rotor coil driver for automotive alternators. IEEE Trans. Ind. Electron. 2013, 60, 2309–2317. [Google Scholar] [CrossRef]
- Braden, J. Measure spread-spectrum clock’s effects on switching supply EMI, Electronic Design. February 2012. Available online: http://www.electronicdesign.com/energy/measure-spread-spectrum-clock-s-effects-switching-supply-emi (accessed on 11 May 2017).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Input Range | PSRR, [dB] | Passive Devices | Temp., [°C] | |
|---|---|---|---|---|---|
| OUR | Mixed SC+linear | 1 V to 60 V | −60 | On-chip capacitors Total 0.66 µF (fSW 4 to 5 MHz) | −40, 150 |
| [88] | Mixed SC+linear | 6 V to 60 V | −60 | Off-chip capacitors Total 52 µF (fSW 100 kHz) | −40, 150 |
| [94] | Inductive | 36 V to 60 V | Off-chip LDO needed | Off-chip passives, >12 µH inductors and >5 mF capacitors | −40, 100 |
| [96] | SC | 2.7 V to 38 V | Off-chip capacitors, total size 12 µF | −40, 150 |
© 2017 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gutierrez, F. Fully-Integrated Converter for Low-Cost and Low-Size Power Supply in Internet-of-Things Applications. Electronics 2017, 6, 38. https://doi.org/10.3390/electronics6020038
Gutierrez F. Fully-Integrated Converter for Low-Cost and Low-Size Power Supply in Internet-of-Things Applications. Electronics. 2017; 6(2):38. https://doi.org/10.3390/electronics6020038
Chicago/Turabian StyleGutierrez, Fernando. 2017. "Fully-Integrated Converter for Low-Cost and Low-Size Power Supply in Internet-of-Things Applications" Electronics 6, no. 2: 38. https://doi.org/10.3390/electronics6020038
APA StyleGutierrez, F. (2017). Fully-Integrated Converter for Low-Cost and Low-Size Power Supply in Internet-of-Things Applications. Electronics, 6(2), 38. https://doi.org/10.3390/electronics6020038