1. Introduction
The traditional PID controller remains the most widely employed control structure in industrial processes, largely due to its simplicity, cost-effectiveness, and efficacy in linear systems [
1,
2,
3,
4]. In recent years, intelligent algorithms, such as neural networks (NNs) [
5], genetic algorithms (GAs) [
6], and reinforcement learning (RL) [
7], have been widely explored for PID parameter tuning to enhance adaptability in complex systems. These methods leverage data-driven optimization to dynamically adjust PID gains (
) under nonlinear, time-varying, or uncertain conditions. For instance, neural network-based PID controllers utilize online learning to approximate system dynamics [
8], while GA-optimized PID controllers iteratively evolve parameters to minimize error metrics [
9]. Despite their theoretical advantages, these approaches face critical limitations in practical applications [
10]: 1. Computational Complexity: Intelligent algorithms often require extensive computational resources and training data, hindering real-time performance in embedded systems or fast-response applications [
11]. 2. Convergence Issues: NNs and GAs may suffer from slow convergence or local optima, particularly in high-dimensional parameter spaces, leading to suboptimal tuning outcomes [
12]. 3. Model Dependency: Many AI-based methods rely on accurate system identification or predefined performance indices, which are challenging to obtain for highly nonlinear or poorly modeled systems [
13]. 4. Implementation Costs: Hybrid approaches, such as neuro-fuzzy PID, integrate multiple algorithms but introduce increased hardware complexity and deployment costs [
14].
In contrast, fuzzy PID controllers offer a pragmatic alternative by combining the simplicity of PID structures with the heuristic adaptability of fuzzy logic [
15]. Fuzzy rules, derived from expert knowledge or empirical observations, enable real-time parameter adjustments based on error (
e) and error rate (
), eliminating the need for precise mathematical models. This method excels in handling nonlinearities, time delays, and disturbances while maintaining computational efficiency. For example, in automotive motion control [
16], fuzzy PID dynamically tunes
and
using linguistic rules, achieving robust performance across varying operating conditions [
17]. Compared to AI-driven methods, fuzzy PID strikes a balance between adaptability, ease of implementation, and real-time responsiveness, making it particularly suitable for industrial systems where reliability and simplicity are prioritized [
18].
While fuzzy PID controllers have significantly improved performance, their effectiveness diminishes when dealing with higher-order uncertainties, primarily because Type-1 fuzzy logic controllers have limited capacity to directly handle uncertainty [
19]. To address these limitations, various advancements have been proposed. For example, Han et al. developed a fuzzy gain scheduling PID controller based on the dynamic characteristics of hybrid robots [
20], and Zhang designed an optimized fuzzy PID controller using an improved beetle antennae search algorithm [
21]. Acharya introduced a novel PID controller using an optimal rule-based fuzzy inference system (FIS) and an enhanced class topology optimization (RCTO) algorithm [
22]. However, these approaches are all based on Type-1 fuzzy logic and thus retain inherent limitations in managing uncertainty [
23,
24]. To overcome these limitations, Zamani combined an interval Type-2 fuzzy logic controller (IT2FLC) with a PID controller, proposing an optimal interval Type-2 fractional-order PID controller (OIT2FOFIDC) [
25]. Saraswat utilized a fuzzy control strategy with particle swarm optimization (PSO) to design a particle swarm-optimized Type-2 fuzzy controller [
26]. Xian introduced an optimized nonlinear fractional-order Type-2 fuzzy system, employing nonlinear gain scaling to enhance control performance [
27]. Despite these innovations, the flexibility of interval Type-2 fuzzy control is still insufficient to fully address the variability of real-world environments. The generalized Type-2 fuzzy logic system, an extension of interval Type-2 fuzzy logic, has shown potential in handling high degrees of uncertainty. Therefore, this paper proposes the use of a generalized Type-2 fuzzy controller to enhance control performance under such conditions [
28]. Additionally, to address the challenge of online parameter adjustment in electronic circuits, this study introduces memristor circuits. Originally proposed by Leon Chua, memristors have gained considerable attention over the years [
29]. For instance, Sun explored one-dimensional and two-dimensional emotional models implemented with memristor hardware circuits [
30], and Lin developed a multi-stable mathematical model of memristors [
31]. Lin also proposed an eight-layer single-chip integrated memristor model consisting of three-dimensional circuits [
29]. However, these studies primarily focused on theoretical models of memristors and lacked empirical validation [
32].
In this paper, we integrate memristor devices to enable online adaptive tuning of controller parameters. By combining the generalized Type-2 fuzzy logic algorithm with memristor-based PID control, we design a memristor-based analog controller that allows for the real-time adaptive adjustment of control parameters. Theoretical derivations are supported by simulations and experimental validations. Results demonstrate that the proposed memristor-based controller, utilizing generalized Type-2 fuzzy logic, exhibits exceptional robustness. Specifically, it improves the ITAE performance index by 65.9% and 40.2% compared to traditional PID and Type-1 fuzzy PID controllers, respectively, confirming the controller’s superior tracking performance. The remainder of this paper is organized as follows:
Section 2 covers the relevant theories,
Section 3 presents the model development,
Section 4 provides simulation validation,
Section 5 details experimental validation,
Section 6 discusses the findings, and
Section 7 concludes the paper.
4. Simulation Validation
First, we present the transfer function of the simulation platform object as
Commonly used performance evaluation criteria for control systems include the Integral of Squared Error (ISE), Integral of Absolute Error (IAE), and Integral of Time-weighted Absolute Error (ITAE). Each of these metrics has its own strengths and weaknesses, making them suitable for different aspects of system evaluation. Therefore, to provide a comprehensive assessment of the controller’s performance, all three criteria are employed in this study. The mathematical formulations for these evaluation metrics are given in Equations (
20)–(
22) as follows:
where
represents the system error over time, and each criterion evaluates the error’s impact on system performance differently. The ISE criterion heavily penalizes large errors, making it more sensitive to significant deviations, while IAE focuses on the total accumulated error, providing a measure of overall system accuracy. ITAE, on the other hand, emphasizes the timing of the error, prioritizing faster responses and reducing long-term error accumulation. By using all three metrics, we can obtain a balanced evaluation of the controller’s precision, robustness, and speed in response to various disturbances and uncertainties in the system.
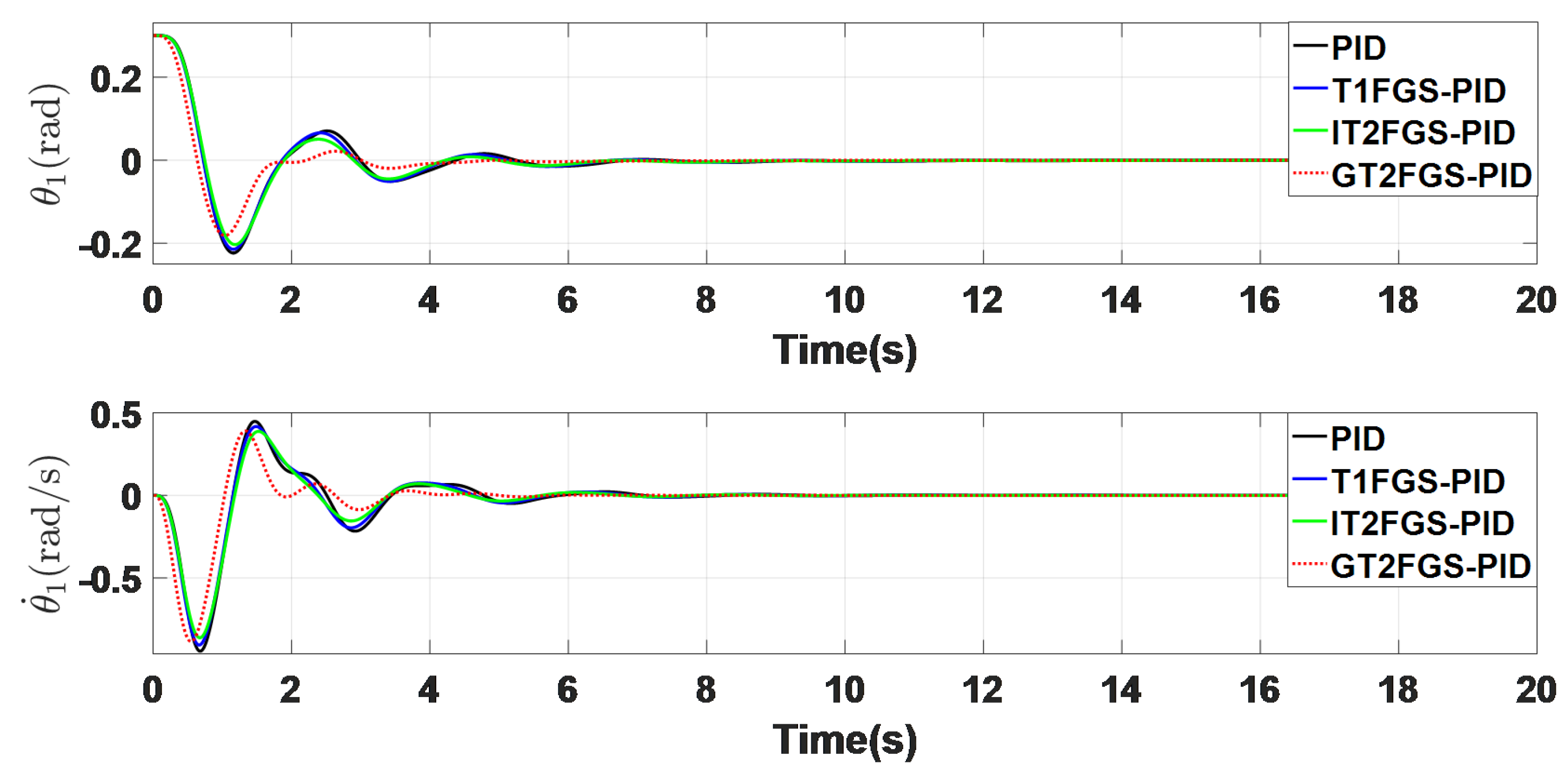
4.1. No Disturbance Scenario
Figure 12 depicts the system response of the photoelectric tracking system under no external disturbance. The initial position is set to
, with the desired steady-state position being
. In this scenario, the external disturbance is assumed to be 0.
By analyzing the system response curves and the data in
Table 2, it is evident that while the performance of the T1FGS-PID and IT2FGS-PID controllers is comparable to the standard PID controller in some metrics, certain performance indicators are inferior. However, the GT2FGS-PID controller consistently outperforms all the others across all key metrics. Notably, the GT2FGS-PID controller exhibits superior speed, returning the system to its steady-state position more rapidly than its counterparts. This controller also demonstrates enhanced stability and responsiveness, ensuring a quicker and more precise convergence to the desired target without sacrificing system stability. The results suggest that the GT2FGS-PID controller is particularly well-suited for applications requiring fast and stable control in the absence of external disturbances.
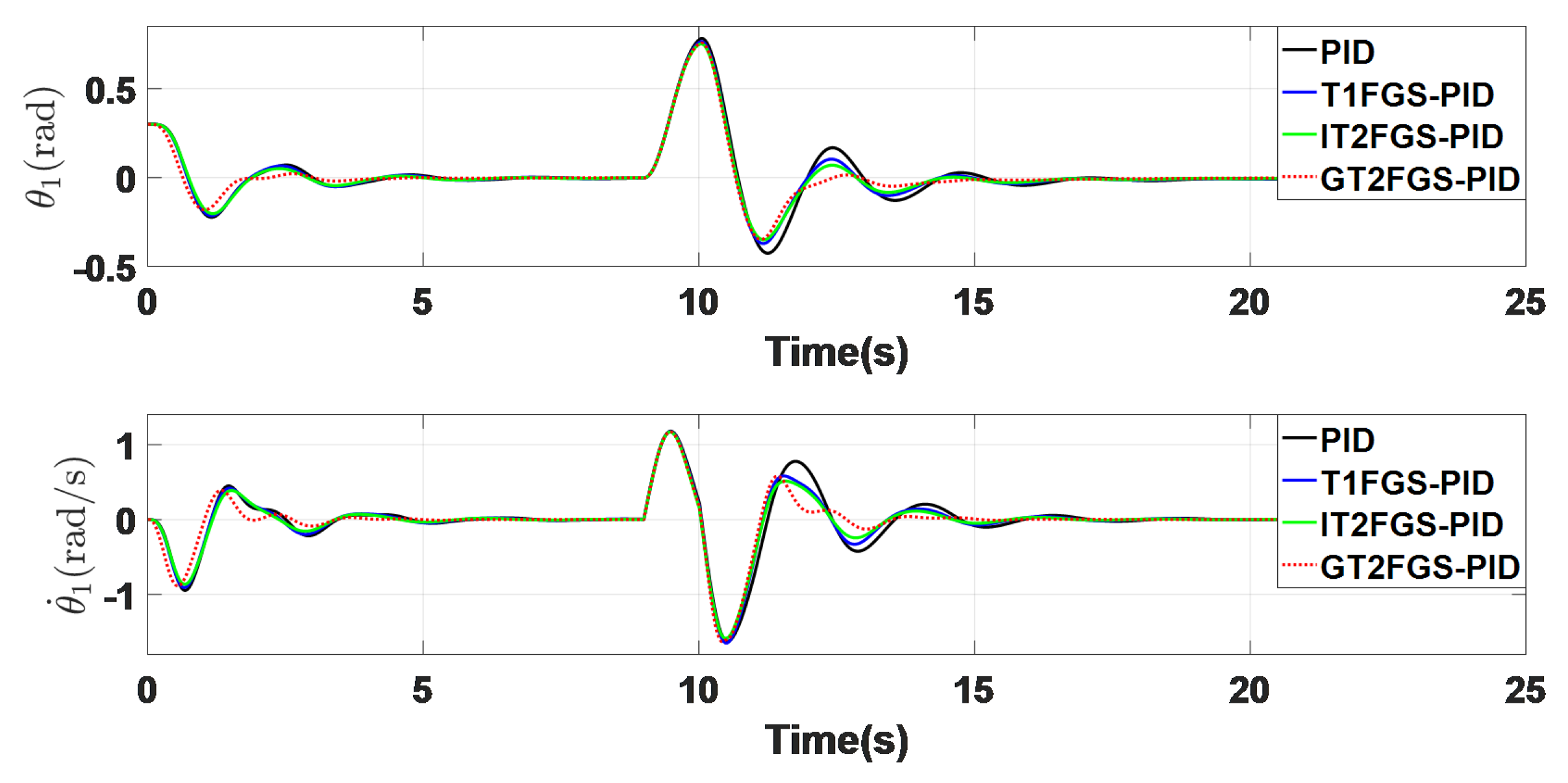
4.2. Response to External Disturbance
In this scenario, a square wave disturbance of
V is introduced during the simulation period from 9 to 10 s.
Figure 13 shows the system response of the photoelectric tracking system under the influence of this external disturbance. From the figures, it is clear that, although all controllers eventually achieve stability, the GT2FGS-PID controller demonstrates the best disturbance rejection capability.
Figure 14 illustrates the system’s response when the external disturbance is increased to
. As observed from
Figure 13 and
Figure 14 and the data presented in
Table 3 and
Table 4, the proposed GT2FGS-PID controller maintains its superior performance even as the external disturbance increases from
to
.
The results indicate that the GT2FGS-PID controller exhibits robust adaptability to external disturbances, outperforming the other controllers in terms of stability, speed, and precision, making it particularly suitable for environments where systems are exposed to varying and significant disturbances.
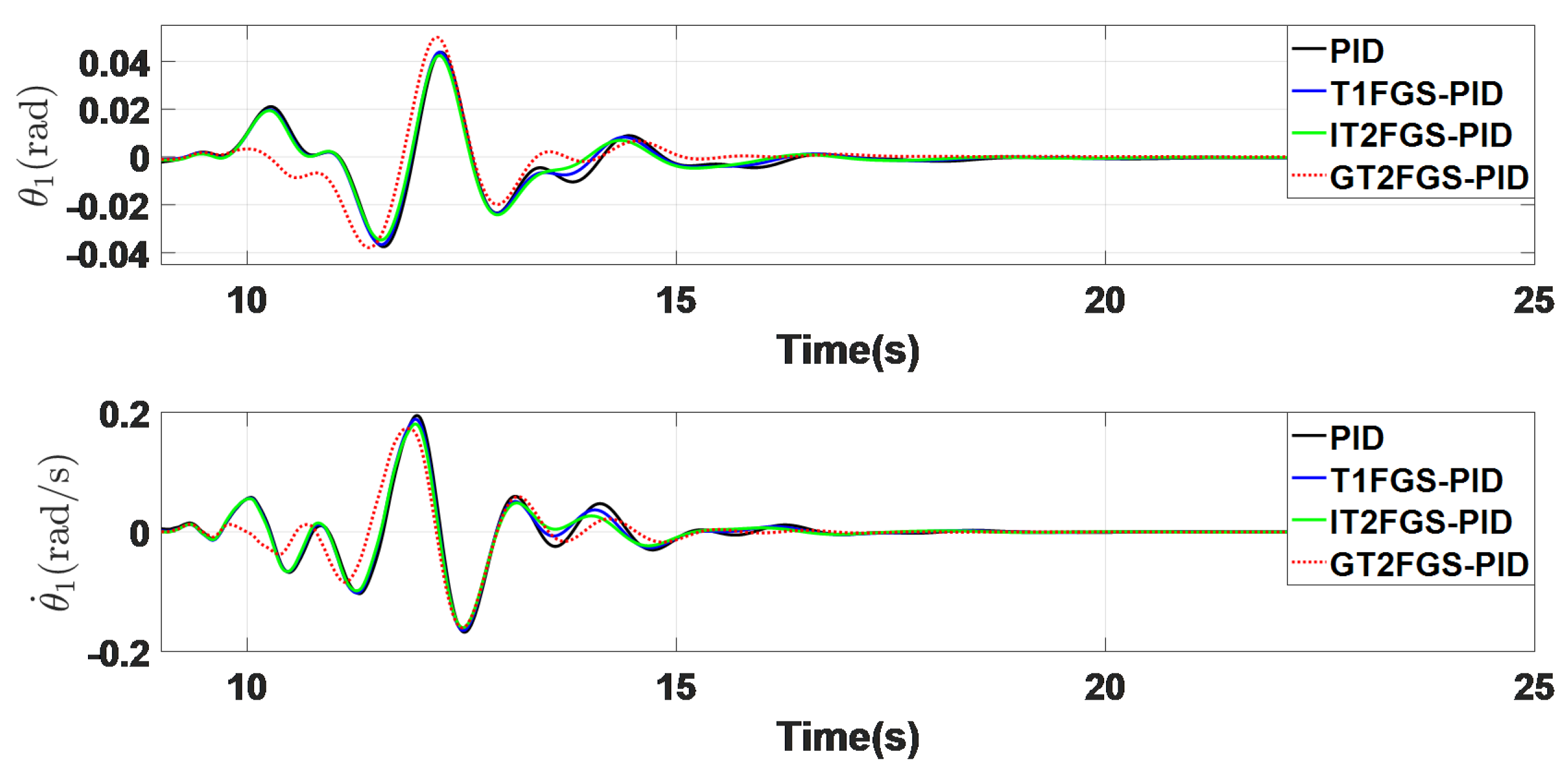
4.3. Response to Random Disturbance
Figure 15 illustrates the system response under random disturbance, while
Figure 16 shows the disturbance profile. After the system stabilizes, at the simulation time of 9 s, random disturbance is applied for a duration of 3 s. To provide a clearer comparison of the four controllers, the response curves are shown starting from 10 s. Based on the response graphs and the data in
Table 5, the advantages of the GT2FGS-PID controller are evident, particularly in terms of smaller vibration amplitude and shorter settling time.
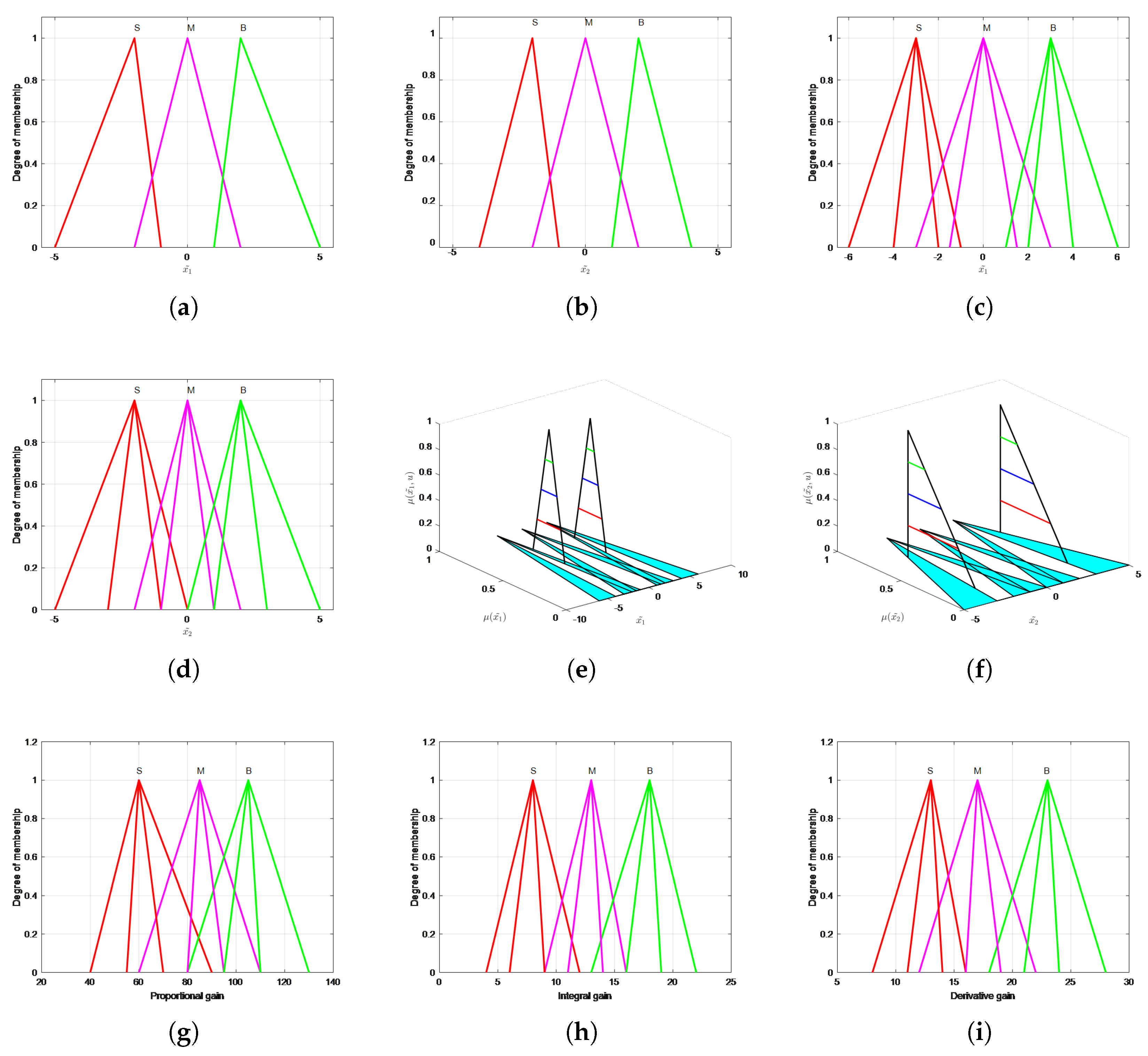
In each simulation graph, the control trends of all four controllers are consistent. This is due to the role of the fuzzy controller, which adjusts the three PID parameters (, , ) in real time, while the PID controller makes the control decisions and generates the output. The primary function of the fuzzy logic controller is twofold: First, it leverages expert knowledge to adjust PID parameters dynamically in response to external changes, even in the presence of uncertain or imprecise nonlinear models. Second, in environments with high uncertainty, the fuzzy controller mitigates the effects of external disturbances more effectively.
The simulation results demonstrate a progressive improvement in control performance from PID to T1FGS-PID, then to IT2FGS-PID, and finally to GT2FGS-PID. Additionally, their disturbance rejection capabilities also increase accordingly. This not only highlights the superior ability of the General Type-2 Fuzzy Logic Controller (GT2FLC) in handling uncertainty but also confirms the effectiveness of combining fuzzy logic with PID control strategies.
5. Experimental Validation
Figure 17 presents a high-precision Pointing and Tracking System (PTS) with a dual-axis, dual-tip tilt mirror tracking mechanism. The system is composed of three main components: a target simulation unit, which includes a signal-emitting device (laser) and a target mirror movement adjustment mechanism, a monitoring unit, comprising a position-sensitive detector and an image charge-coupled device (CCD), and a control unit, which operates the tracking mirror. In operation, the laser functions as the signal emitter to simulate the target’s motion, while the target mirror within the simulation unit adjusts the target’s movement. The tracking mirror, driven by a motor, reflects the signal onto the position-sensitive detector. The CCD detects the steady-state error after receiving the target signal and subsequently sends this error information to the position controller.
The transfer function of the control system is given by
To enhance the practical application of memristor circuits, this section presents the implementation of a printed circuit board (PCB) for the flux-controlled memristor circuit, as illustrated in
Figure 18a. To incorporate a differentiation module and improve the circuit’s noise immunity, a filtering circuit was added. The overall circuit consists of two main parts. The first part is the memristor, with the fabricated PCB measuring 3 × 3.2 cm. It features two sets of pin headers: the upper header has three pins corresponding to the memristor’s input, output terminals, and an external control signal terminal, while the lower header serves as the power supply connection. The physical implementation of the memristor circuit is depicted in
Figure 18b.
Figure 18c illustrates the experimental setup, where the FSM serves as the control object. The memristor circuit board is integrated into the MPID module, with the signal generator providing excitation signals. A DSP module is programmed with a fuzzy control algorithm, and the oscilloscope is used to analyze and compare the system’s response. This setup facilitates the real-time testing of the memristor-based control system, allowing for the assessment of its dynamic performance in practical applications.
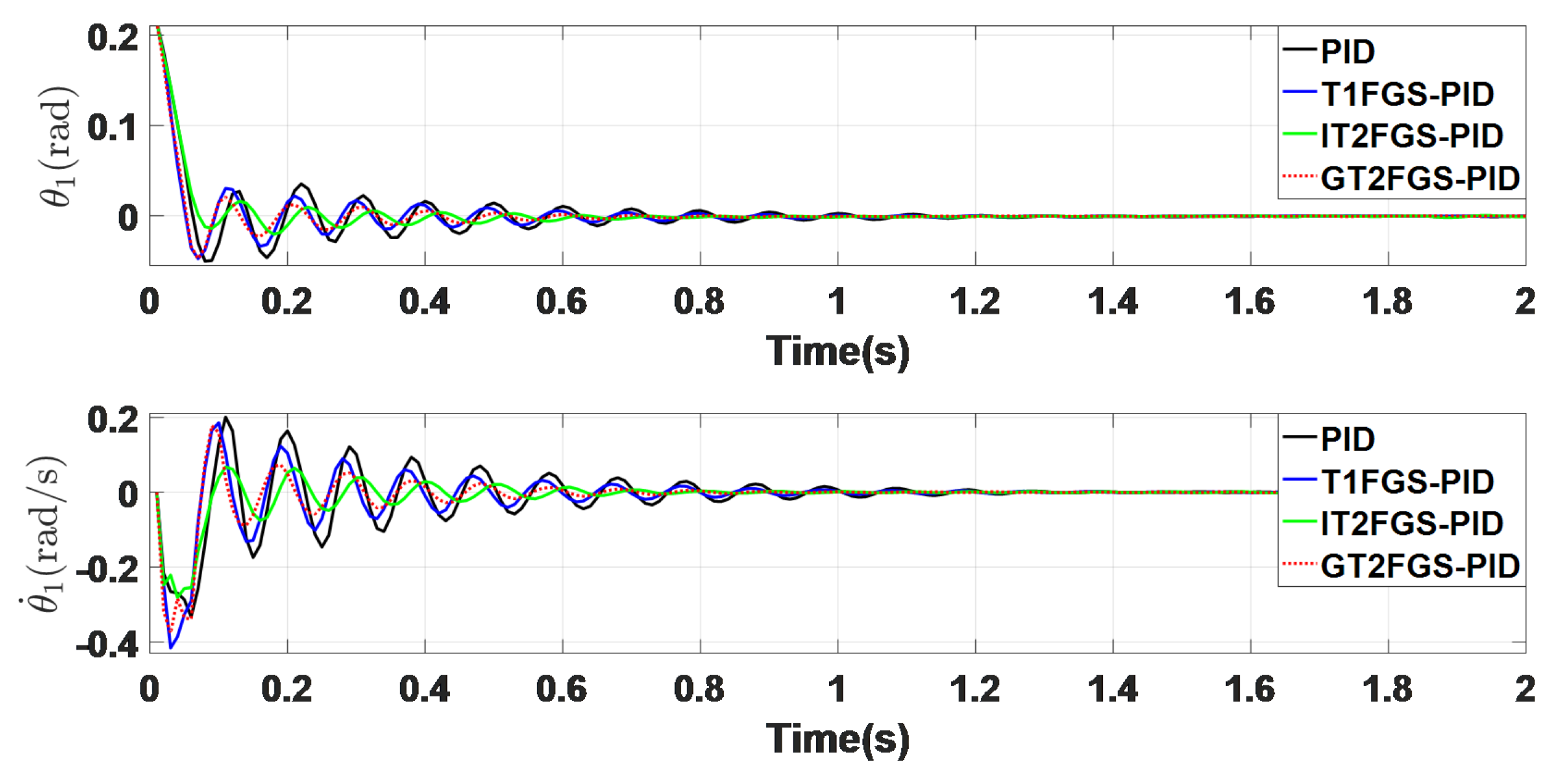
5.1. No Disturbance Scenario
In this scenario, external disturbance is set to zero. As shown in
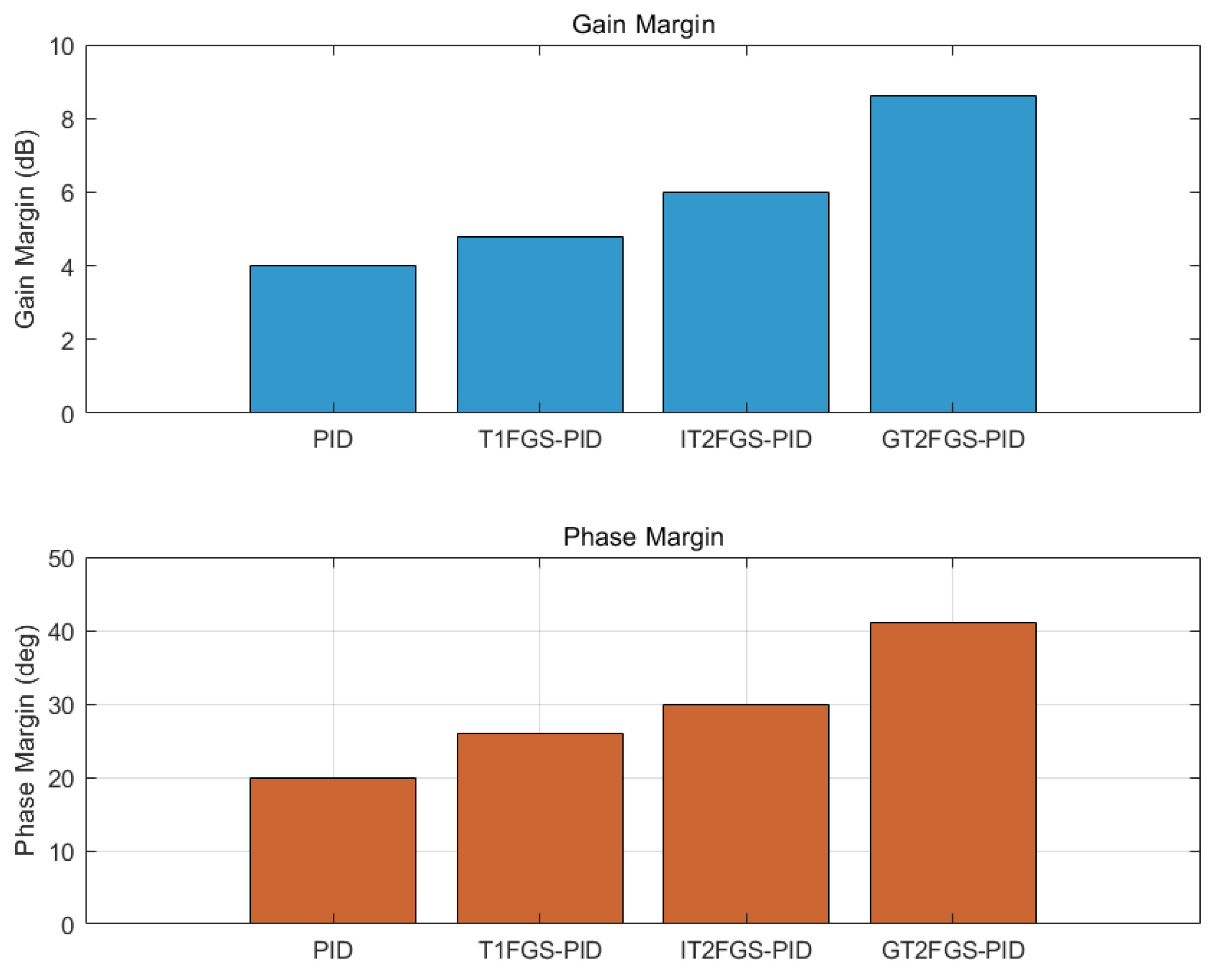
Figure 19, the system responses of the four controllers align with the results from previous numerical simulations. The GT2FGS-PID and IT2FGS-PID controllers exhibit superior dynamic performance compared to the PID and T1FGS-PID controllers, with both reaching the equilibrium position more rapidly. While the GT2FGS-PID controller shows slightly larger oscillations compared to IT2FGS-PID, it demonstrates faster response times. To further validate the superiority of the proposed method, this chapter incorporates stability margin analysis as shown in
Figure 20 and steady-state error evaluation as additional performance metrics. A comparison of the data in
Table 6 further confirms that, overall, the GT2FGS-PID controller offers better control performance.
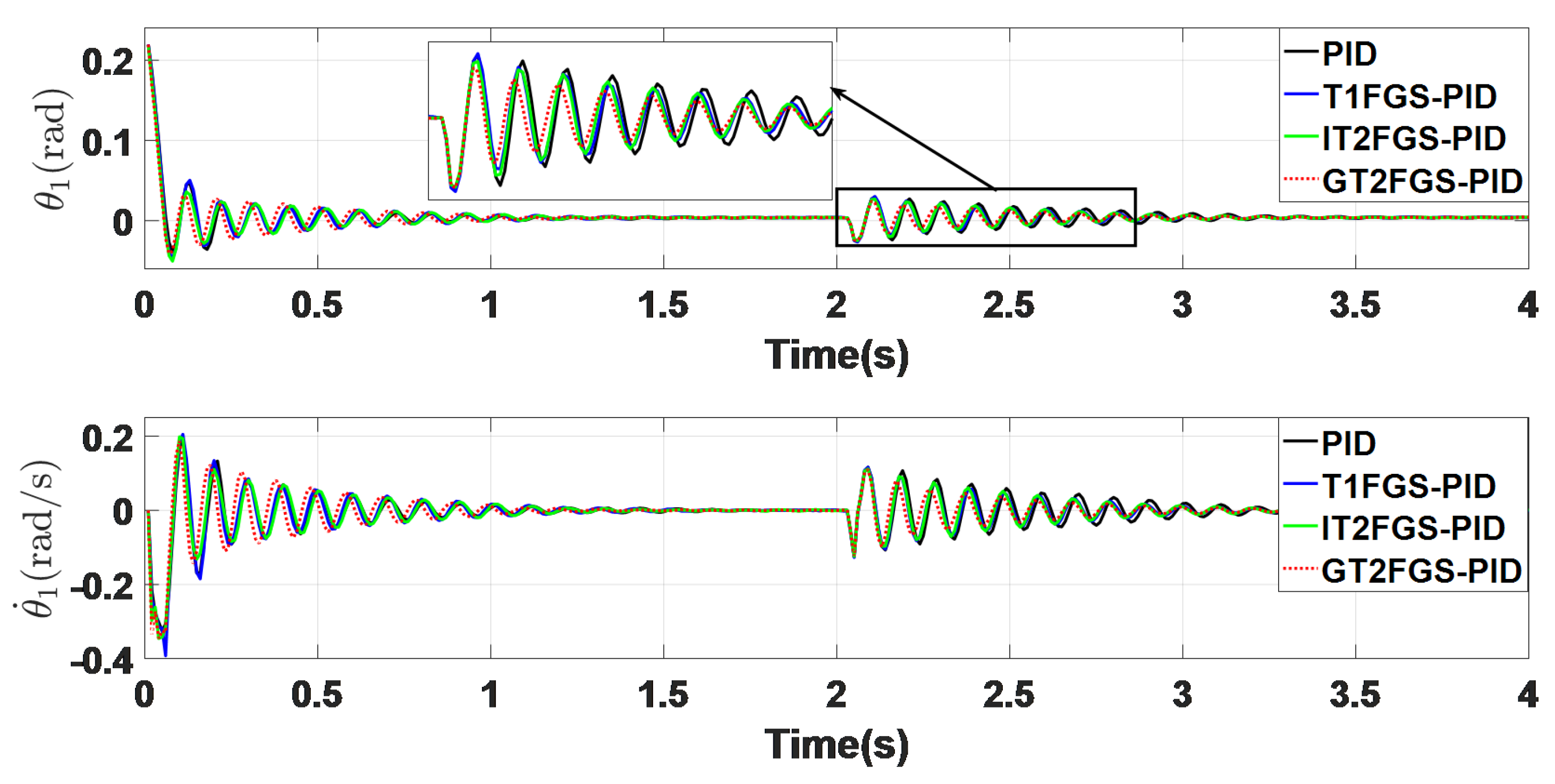
5.2. Under External Disturbance
In this scenario, the robustness of the controllers in the presence of external disturbances was evaluated. As shown in
Figure 21 and
Figure 22 and summarized in
Table 7, an external disturbance was introduced at the simulation time of 2 s. The GT2FGS-PID controller exhibited smaller fluctuations in response to the disturbance and reached the equilibrium position faster than the other controllers, demonstrating superior disturbance rejection capabilities.
6. Discussion
The experimental validation of the GT2FGS-PID controller yielded more realistic system responses for the photonic tracking system. The simulation results consistently demonstrated that the GT2FGS-PID controller offers superior control performance and enhanced handling of external uncertainties. This section focused on two experimental scenarios: one without disturbances and another with external disturbances. In the disturbance-free scenario, comparing the numerical simulations and experimental results for the GT2FGS-PID controller reveals a significant increase in the time required to reach system stability. In the numerical simulation, all four controllers achieved stability at 0.08 s (with a sampling interval of 0.01 s and eight sampling points). However, in the experimental setting, stability was only reached at 0.21 s (with a sampling interval of 0.15 s and 1.4 sampling points). This discrepancy is primarily due to differences in the experimental environment, where the system response was less ideal compared to the simulation. In the real system, factors such as inertia and unforeseen disturbances affected the response. Additionally, the increased sampling interval and communication delays between platforms led to signal latency, further diminishing controller performance. In the presence of external disturbances, comparing the numerical simulations and experimental results for the GT2FGS-PID controller reveals a noticeable increase in the number of oscillations near the equilibrium position in the experimental setting. This is partly due to the system’s inherent inertia and dynamic properties. Additionally, the photonic tracking system typically requires multiple adjustments to reach the equilibrium position, which explains the increased oscillation observed in the experimental results. Overall, the experiments conducted in a real-world environment validated the effectiveness and robustness of the GT2FGS-PID controller for equilibrium control of the photonic tracking system. The results confirm its superior performance in achieving stable control, even in the presence of uncertainties and disturbances. Further research and improvement are still needed. First, the generalized type-2 fuzzy control method used in this study relies on multiple -level sets to represent the three-dimensional membership functions. While this approach reduces computational complexity, it also compromises the precision of the controller. Future work should focus on optimizing the balance between computational efficiency and precision by simplifying the generalized type-2 fuzzy membership functions without sacrificing accuracy. Additionally, due to the high computational complexity involved in calculating controller parameters, this study employed offline optimization of the adjustable parameters. To improve practical applicability, future work should aim to implement real-time online optimization, allowing the controller to flexibly handle various external disturbances in real-world applications.


 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}