
Simulation of Human Behavior Recognition Based on WiFi Signal

Abstract

1. Introduction
2. Materials and Methods
2.1. Wi-Fi Signal Characteristics
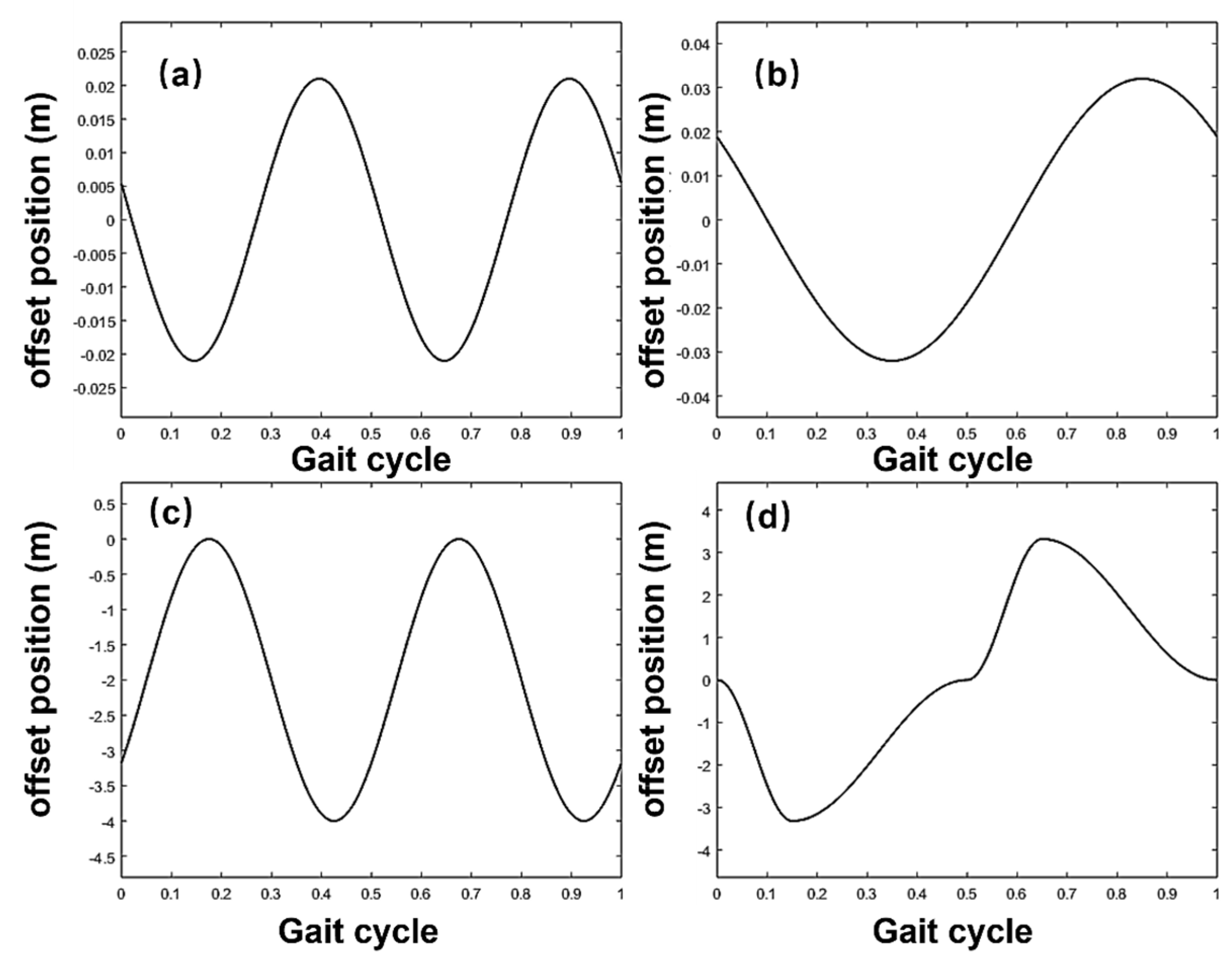
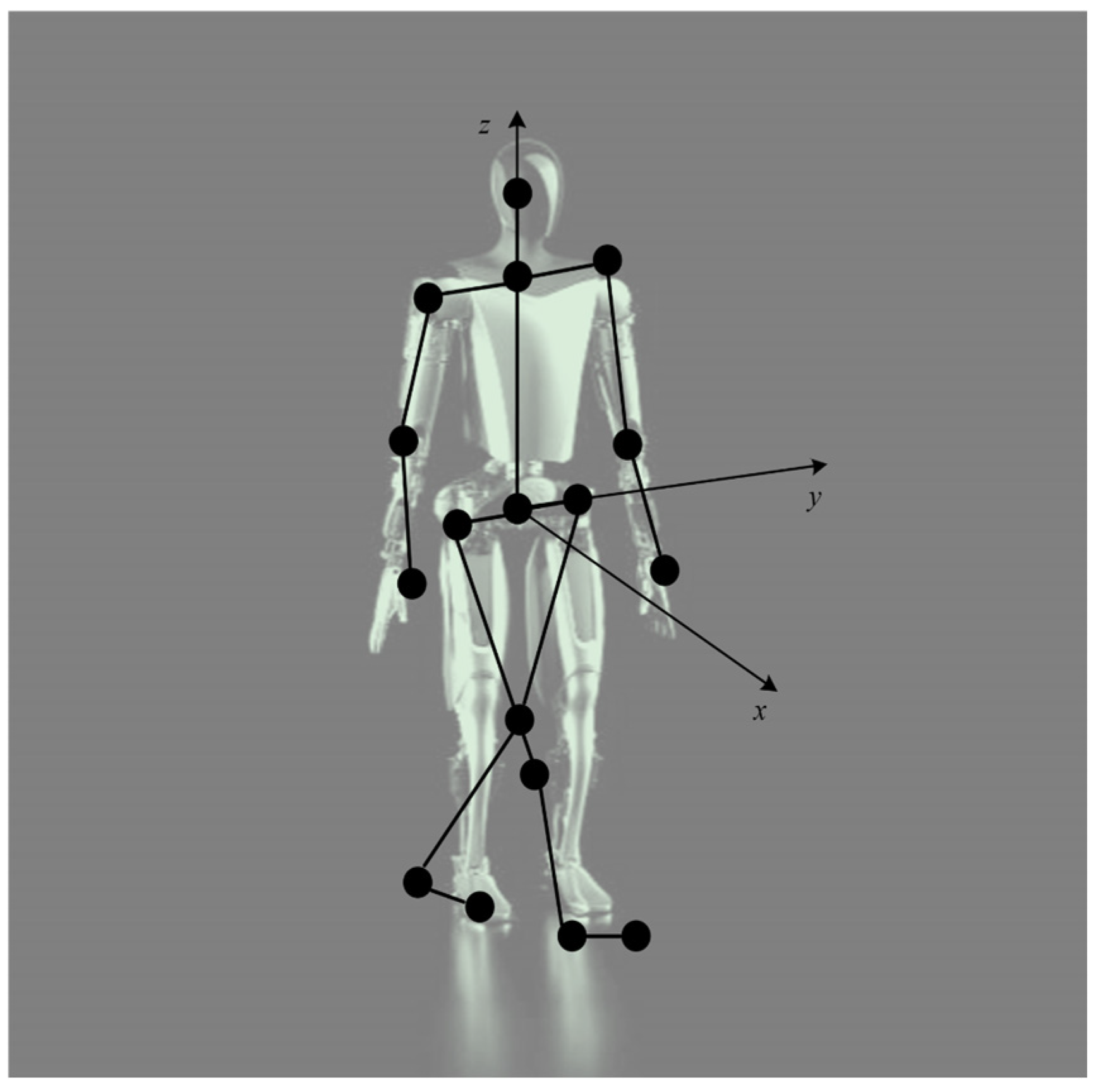
2.2. Parametric Mathematical Modeling of Human Walking
- (1)
- Forward/Backward Panning
- (2)
- Lateral Translation
- (3)
- Forward/Backward Rotation
- (4)
- Left/Right Rotation
- (5)
- Human Walking Models
3. Results
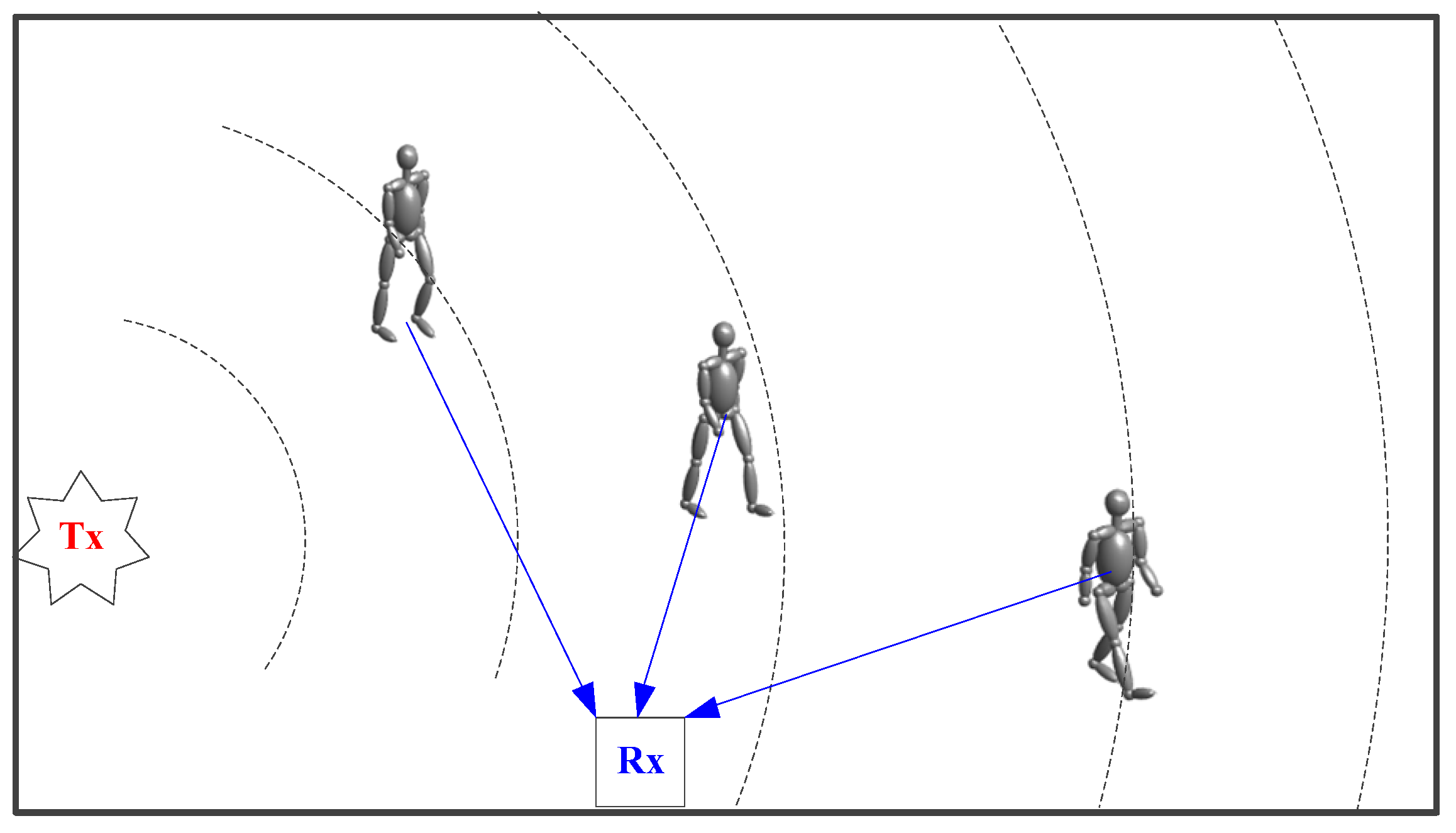
3.1. Simulation Experiment Scenario Description
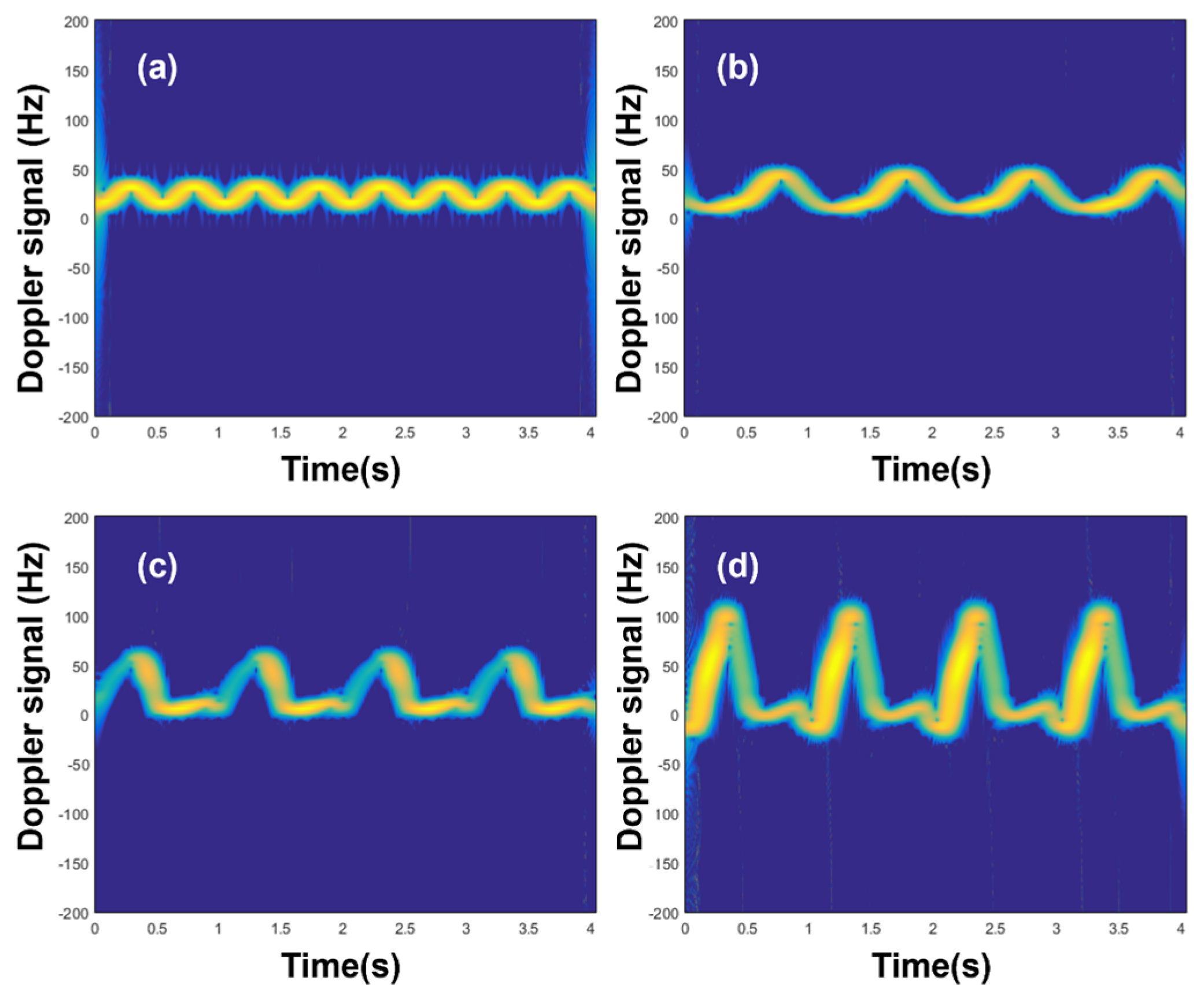
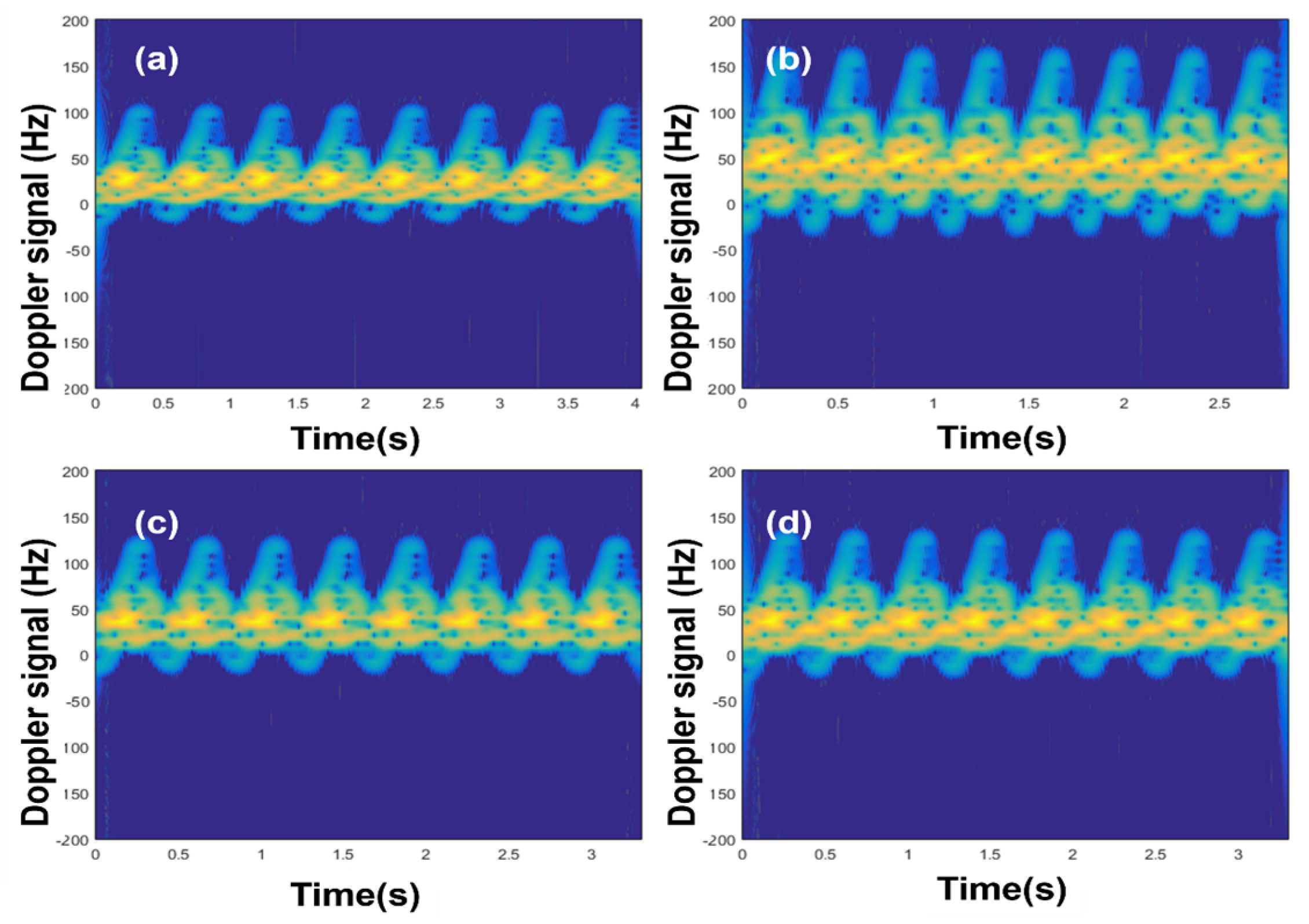
3.2. Signal Analysis of Human Micromotor Characteristics
3.3. Comparison with Existing Human Behavior Recognition Techniques
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chetty, K.; Smith, G.E.; Woodbridge, K. Through-the-wall sensing of personnel using passive bistatic WiFi radar at standoff distance. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1218–1226. [Google Scholar] [CrossRef]
- Rao, Y.; Pan, D.; Zhu, H.; Wang, X.; Yi, J.; Gong, Z.; Ke, H. Single station localization of indoor WiFi emitter with multipath exploitation. J. Terahertz Sci. Electron. Inf. Technol. 2021, 19, 672–677. [Google Scholar]
- Wu, X. Research on WiFi-Based Passive Radar Waveform and Key Technologies of Signal Processing; University of Electronic Science and Technology of China: Cheng Du, China, 2019. [Google Scholar]
- Rao, Y.; Ming, Y.; Lin, J.; Zhu, F.; Wan, X.; Gong, Z. Reference Signal Reconstruction and Its Impact on Detection Performance of WiFi-based Passive Radar. J. Radars 2016, 5, 284–292. [Google Scholar]
- Kumawat, S.; Verma, M.; Nakashima, Y.; Raman, S. Depthwise spatio-temporal STFT convolutional neural networks for human action recognition. IEEE Trans Pattern Anal. Mach. Intell. 2021, 44, 4839–4851. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Xie, C.; Zhang, B.; Han, J.; Zhen, X.; Chen, J. Memory attention networks for skeleton-based action recognition. IEEE Trans Neural Netw. Learn. Syst. 2021, 33, 4800–4814. [Google Scholar] [CrossRef] [PubMed]
- Hao, X.; Li, J.; Guo, Y.; Jiang, T.; Yu, M. Hypergraph neural network for skeleton-based action recognition. IEEE Trans Image Process. 2021, 30, 2263–2275. [Google Scholar] [CrossRef] [PubMed]
- Yang, W. IEEE 802.11 WLAN Standard Developing Process and Developing Direction. Telecom Eng. Tech. Stand. 2002, 54, 59. [Google Scholar]
- Boulic, R.N. Magnenat-Thalmann, and D. Thalmann. A Global Human Walking Model with Real-Time Kinematic Personifi cation. Vis. Comput. 1990, 6, 344–358. [Google Scholar] [CrossRef]
- Chen, V.C. The Micro-Doppler Effect in Radar; Wu, S.; Du, L.; Liu, H., Translators; Publishing House of Electronics Industry: Beijing, China, 2013; pp. 149–159. [Google Scholar]
- Chen, V.C. Analysis of radar micro-Doppler with time-frequency transform. In Proceedings of the Tenth IEEE Workshop on Statistical Signal and Array Processing (Cat. No.00TH8496), Pocono Manor, PA, USA, 16 August 2000; pp. 463–466. [Google Scholar]
- Guo, J.; Wang, L.; Zhu, D.; Zhang, G. SAR target recognition with limited samples based on meta knowledge transferring using relation network. In Proceedings of the 2020 International Symposium on Antennas and Propagation (ISAP), Singapore, 4–10 December 2021; pp. 377–378. [Google Scholar]
- Niu, W.; Zhai, R. A video human behavior recognitionmethod based on improved 3D ResNet. J. Comput. Eng. Sci. 2023, 45, 1814–1821. [Google Scholar]
- Wang, C.; Tang, C.; Wang, W.; Zhang, J. Infrared Human Action Recognition Method Based on Multimodal Attention Network. J. Comput. Sci. 2024, 51, 232–241. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Small-Sample Recognition Task Settings | Recognition Accuracy |
|---|---|
| Three-way-one-shot | 88.2% |
| Three-way-five-shot | 94% |
| Technology | Accuracy |
|---|---|
| WiFi Signal Detection | 94.0% |
| Video-Based Detection (improved 3D ResNet) | 75.22% |
| Infrared-Based Detection | 93.11% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Chen, P.; Wu, Y. Simulation of Human Behavior Recognition Based on WiFi Signal. Electronics 2025, 14, 882. https://doi.org/10.3390/electronics14050882
Li L, Chen P, Wu Y. Simulation of Human Behavior Recognition Based on WiFi Signal. Electronics. 2025; 14(5):882. https://doi.org/10.3390/electronics14050882
Chicago/Turabian StyleLi, Lanxin, Ping Chen, and Yangxu Wu. 2025. "Simulation of Human Behavior Recognition Based on WiFi Signal" Electronics 14, no. 5: 882. https://doi.org/10.3390/electronics14050882
APA StyleLi, L., Chen, P., & Wu, Y. (2025). Simulation of Human Behavior Recognition Based on WiFi Signal. Electronics, 14(5), 882. https://doi.org/10.3390/electronics14050882