


A Comparative Analysis of Fuzzy Logic Control and Model Predictive Control in Photovoltaic Maximum Power Point Tracking



Abstract
1. Introduction
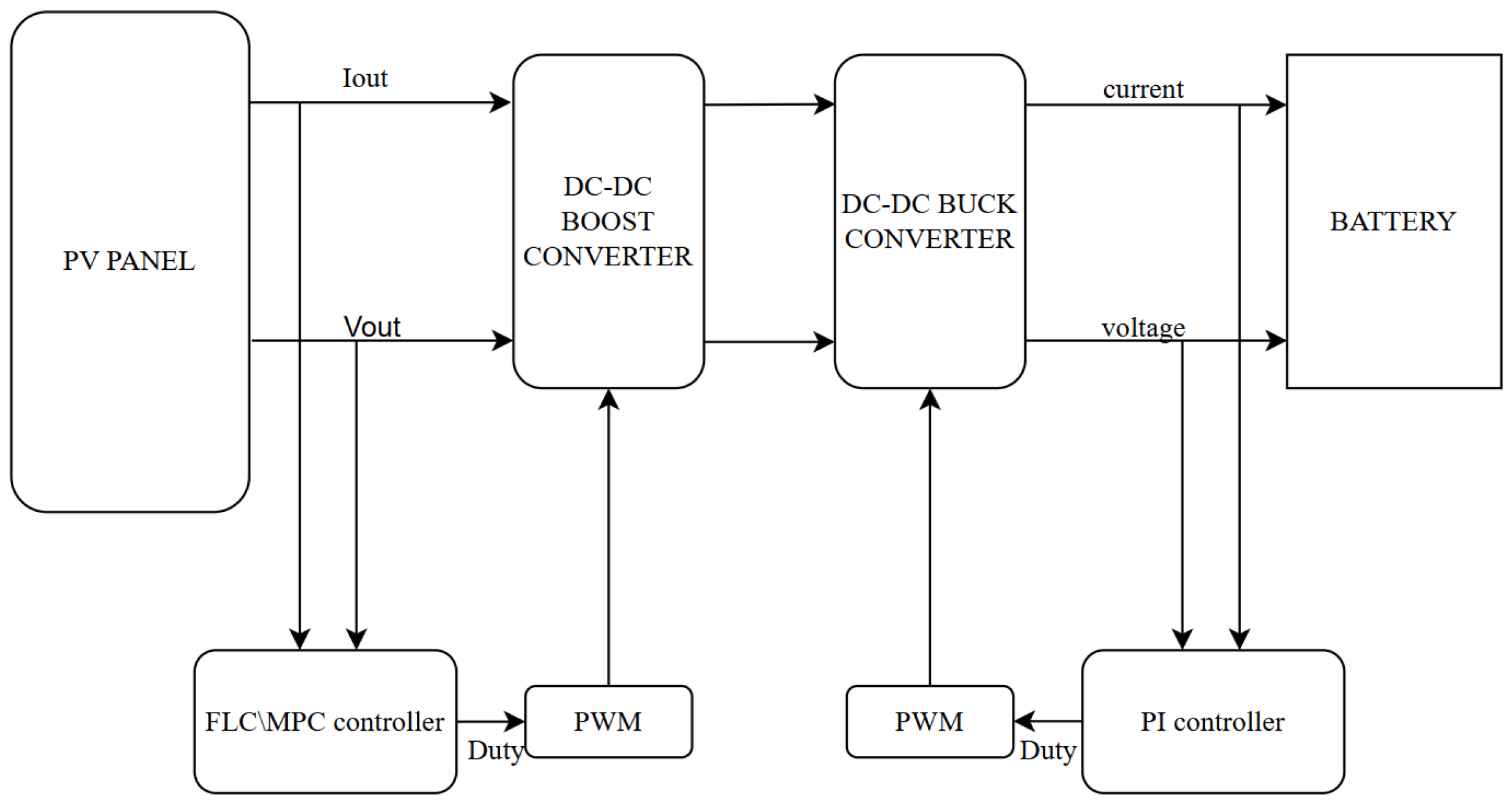
2. Problem Formulation
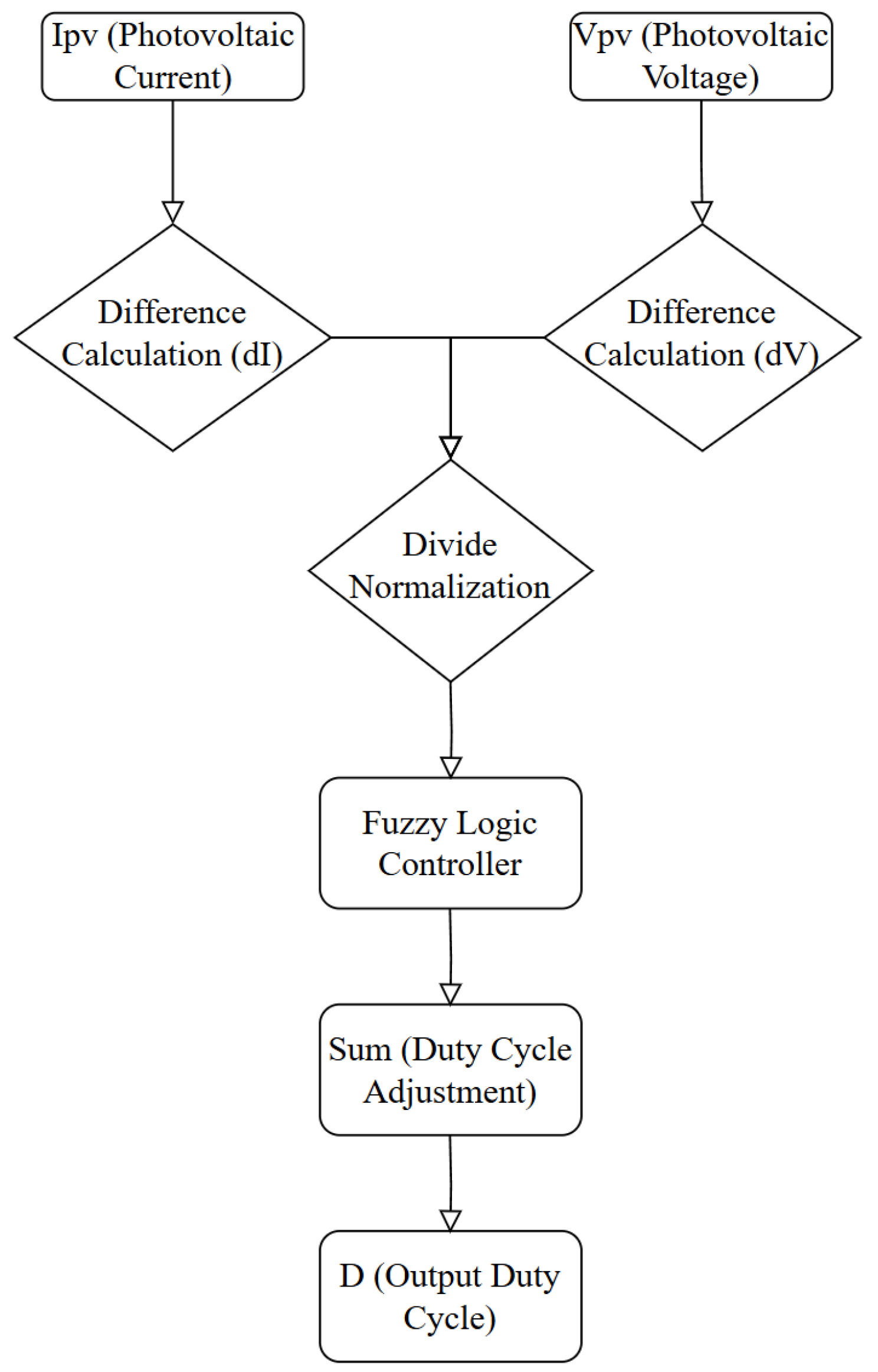
3. Design of FLC
3.1. Define Inputs and Outputs
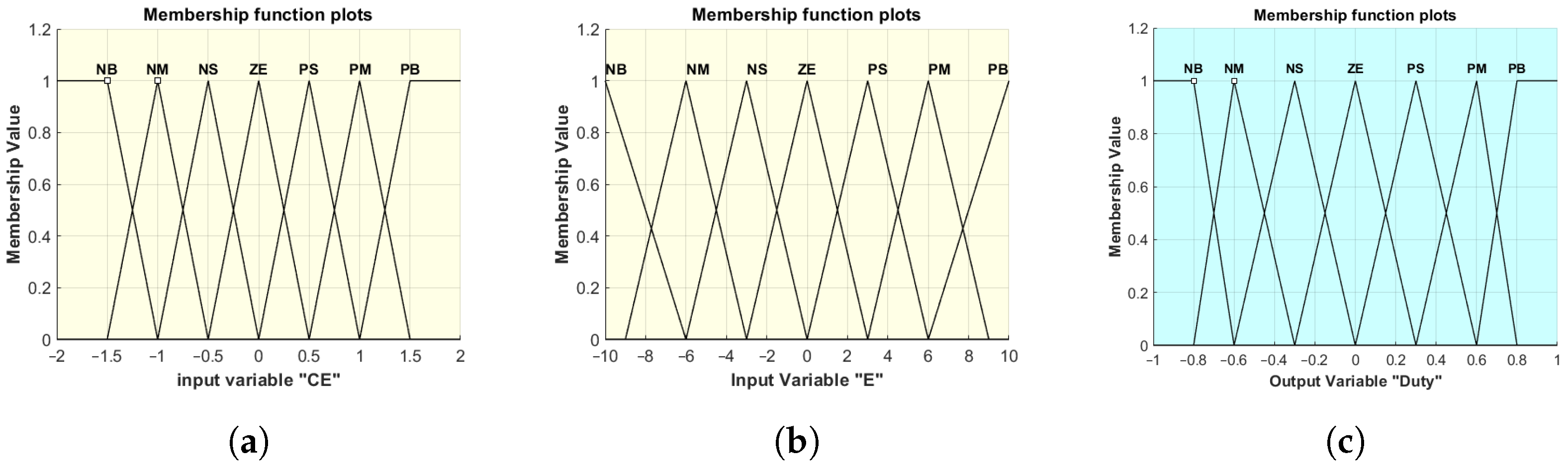
3.2. Fuzzification
3.3. Fuzzy Rule Base
3.4. Integration
3.5. Tuning
- Membership Functions: Adjust the range and overlap of the membership functions to handle system dynamics better.
- Rule Adjustment: Modify or add new rules based on how the system responds to different conditions.
4. Design of MPC
4.1. Handling Constraints
- Input constraints (i.e., voltage):
- State constraints (i.e., temperature):
- Output constraints (i.e., power):
4.2. Efficient Code and Solver Optimization
- Use efficient numerical solvers (e.g., active-set or interior-point methods) that can solve the optimization problem within the control cycle time.
- Reduce prediction horizons if computational time becomes a limiting factor.
- Optimize the code by minimizing unnecessary calculations and using parallel computing if necessary to improve the processing speed.
5. Results and Analysis
5.1. Performance Comparison
5.1.1. Dynamic Response Characteristics
5.1.2. Performance Under Different Disturbances
5.2. Computational Complexity
5.3. Robustness and Disturbance Handling
6. Discussion
6.1. Comparative Analysis
- Dynamic Response: MPC showcases superior dynamic responsiveness due to its predictive nature, in contrast to FLC’s reliance on static fuzzy rules, which leads to slower response times during rapid changes.
- Steady-State Accuracy: MPC consistently surpasses FLC in steady-state scenarios, particularly within high-performance systems, due to its optimization strategies that effectively minimize steady-state errors. Conversely, while FLC’s heuristic nature affords computational efficiency, it tends to yield increased oscillations and errors, rendering it more suitable for less precision-critical applications with limited resources.
- Handling System Constraints: MPC exhibits superior capability in managing intricate system constraints by incorporating them into its optimization framework, unlike FLC, which lacks predictive capabilities and thus is less effective in complex situations.
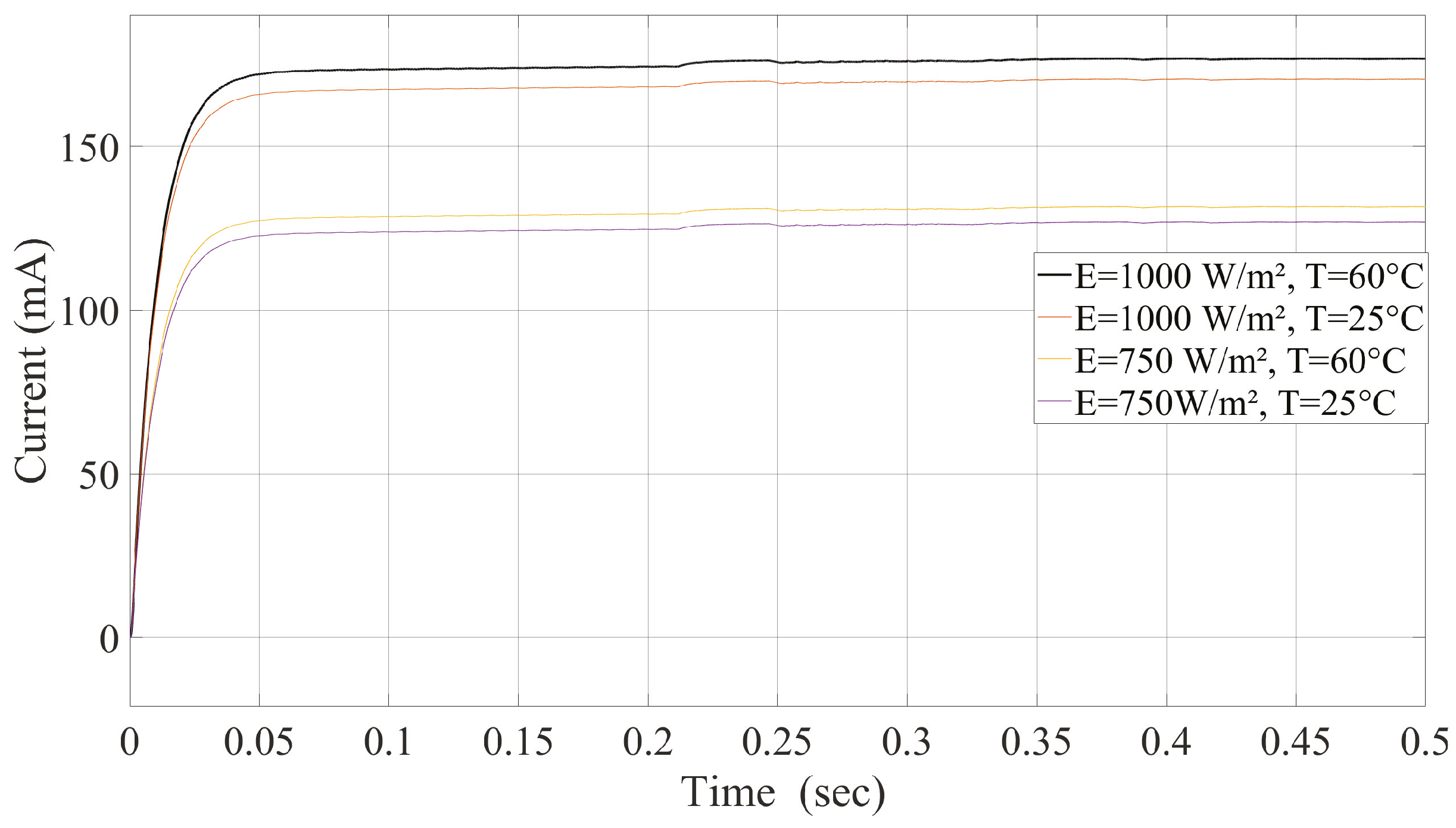
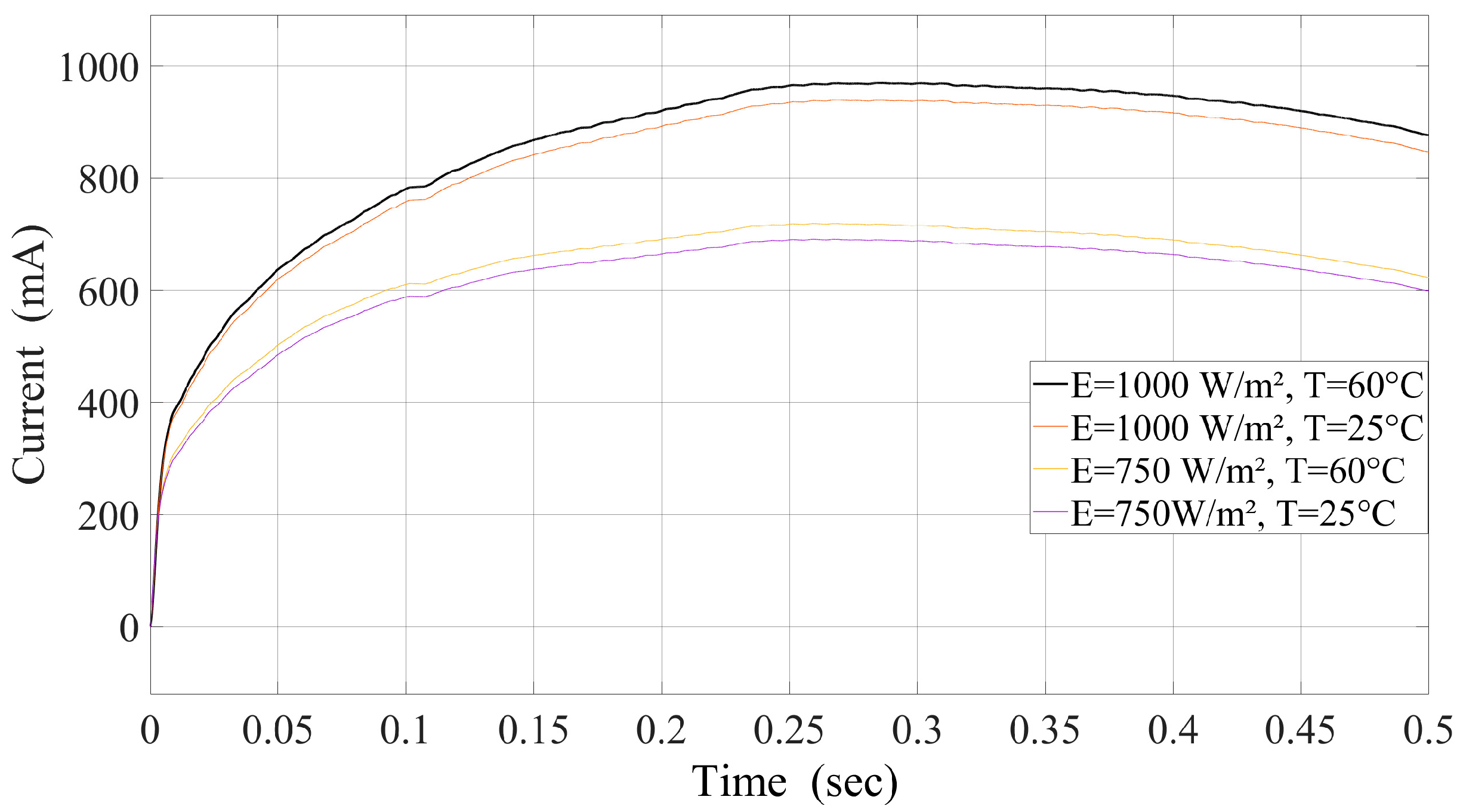
- Performance Under Varying Irradiance and Temperature: The fluctuating conditions of irradiance and temperature significantly influence the operational efficiency of PV systems, necessitating a comparison of the ability of FLC and MPC to sustain MPPT efficiency amidst these variances.
6.2. Implications and Practical Limitations
- Predictive control optimization: The MPC algorithm anticipates future changes, enabling smooth and fast adjustments to maintain optimal power tracking.
- Nonlinear system handling: The FLC approach effectively manages system uncertainties, ensuring stable performance even in resource-constrained environments.
- Hybrid control integration: The combination of MPPT strategies with a PI-controlled buck converter enhances system stability and mitigates the risks of overcurrent and voltage fluctuations.
6.3. Future Direction
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hassan, M.A.; Adel, M.M.; Saleh, A.A.; Eteiba, M.B.; Farhan, A. Maximum Power Point Tracking based on finite voltage-set MPC for grid-connected photovoltaic systems under environmental variations. Sustainability 2024, 16, 10317. [Google Scholar] [CrossRef]
- Xie, J.; Xu, L.; Zhang, H.; He, Y.; Ghandour, R.M.R.; Zhou, J.; Ge, Y.; Li, Q. Characteristic harmonic spectrum relocating for controlling specific inter-harmonics of inverters with new phase-shifted rotating PWM. IEEE Access 2020, 8, 191005–191027. [Google Scholar] [CrossRef]
- Solanics, P.; Kozminski, K.; Bajpai, M.; Esztergalyos, J.; Fennell, E.; Gardell, J.; Mozina, C.; Patel, S.; Pierce, A.; Skendzic, V.; et al. The impact of large steel mill loads on power generating units. IEEE Trans. Power Deliv. 2000, 15, 24–30. [Google Scholar] [CrossRef]
- Nadeem, A.; Hussain, A. A comprehensive review of global maximum power point tracking algorithms for photovoltaic systems. Energy Syst. 2021, 14, 293–334. Available online: https://link.springer.com/article/10.1007/s12667-021-00476-2 (accessed on 6 January 2025). [CrossRef]
- Wang, F.; Bollen, M. Measurement of 182 Hz Interharmonics and Their Impact on Relay Operation. In Proceedings of the International Conference on Harmonics and Quality of Power, Orlando, FL, USA, 1–4 October 2000; pp. 55–60. [Google Scholar]
- Koponen, P.; Hansen, H.; Bollen, M. Interharmonics and Light Flicker. In Proceedings of the 23rd International Conference on Electricity Distribution (CIRED 2015), Lyon, France, 15–18 June 2015; p. 1100. [Google Scholar]
- Langella, R.; Testa, A.; Djokic, S.Z.; Meyer, J.; Klatt, M. On the Interharmonic Emission of PV Inverters under Different Operating Conditions. In Proceedings of the International Conference on Harmonics and Quality of Power (ICHQP), Belo Horizonte, Brazil, 16–19 October 2016; pp. 1–6. [Google Scholar]
- Zhang, T.; Stackhouse, P.W.; Macpherson, B.; Mikovitz, J.C. Short-term photovoltaic power prediction strategies based on meteorological reconstruction. Sol. Energy 2024, 238, 1–12. [Google Scholar]
- Liao, Y.; Chen, W. Design and implementation of an MPPT-based energy management system for microgrids. IEEE Trans. Smart Grid 2019, 10, 4914–4923. [Google Scholar]
- Singh, J.; Verma, A.K.; Sharma, S.K. Advanced Control Strategies for Optimal Power Transfer in Grid-Connected PV Systems: A Review. Energy Rep. 2021, 7, 429–450. [Google Scholar]
- Zhang, T.; Stackhouse, P.W.; Macpherson, B.; Mikovitz, J.C. A novel multiple-medium-AC-port power electronic transformer. IEEE Trans. Power Deliv. 2024, 39, 100–115. [Google Scholar] [CrossRef]
- Wang, P.; Li, Z.; Xu, D. An asymmetric hybrid phase-leg modular multilevel converter with small volume, low cost, and DC fault-blocking capability. IEEE Trans. Power Electron. 2024, 39, 1000–1012. [Google Scholar]
- Langella, R.; Testa, A.; Meyer, J.; Möller, F.; Stiegler, R.; Djokic, S.Z. Experimental-based evaluation of PV inverter harmonic and interharmonic distortion due to different operating conditions. IEEE Trans. Instrum. Meas. 2016, 65, 2221–2233. [Google Scholar] [CrossRef]
- Sangwongwanich, A.; Yang, Y.; Sera, D.; Soltani, H.; Blaabjerg, F. Analysis and modeling of interharmonics from grid-connected photovoltaic systems. IEEE Trans. Power Electron. 2018, 33, 8353–8364. [Google Scholar] [CrossRef]
- Sangwongwanich, A.; Blaabjerg, F. Interharmonics Reduction in Photovoltaic Systems with Random Sampling MPPT Technique. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 4760–4765. [Google Scholar]
- Luo, Q.; Zhong, Q.; Wang, G. An order-reduction method of interharmonic analysis model based on the principle of interharmonic interaction. CPSS Trans. Power Electron. Appl. 2021, 6, 209–217. [Google Scholar] [CrossRef]
- Alfaris, F.E.; Al-Ammar, E.A.; Ghazi, G.A.; Al-Katheri, A.A. Design enhancement of grid-connected residential PV systems to meet the Saudi electricity regulations. Sustainability 2024, 16, 5235. [Google Scholar] [CrossRef]
- Zhang, X.; Li, Y.; Zhou, W.; Zhou, Q. Enhanced Maximum Power Point Tracking for PV systems using a predictive control approach. IEEE Access 2020, 8, 50315–50324. [Google Scholar]
- Ali, M.; Ahmad, A.; Khan, R.; Iqbal, M. A comprehensive review of MPPT techniques for standalone and grid-connected PV systems. Renew. Energy 2023, 205, 175–188. [Google Scholar]
- Yılmaz, U.; Kircay, A.; Börekci, S. PV System Fuzzy Logic MPPT Method and PI Control as a Charge Controller. Renew. Sustain. Energy Rev. 2018, 81, 994–1001. [Google Scholar] [CrossRef]
- Tofigh Rihani, A.; Ghandchi, M. Increasing the Efficiency of Photovoltaic Systems by Using Maximum Power Point Tracking (MPPT). arXiv 2021, arXiv:2201.00403. [Google Scholar]
- Paduani, V.; Yu, H.; Xu, B.; Lu, N. A Unified Power-Setpoint Tracking Algorithm for Utility-Scale PV Systems with Power Reserves and Fast Frequency Response Capabilities. arXiv 2021, arXiv:2105.05324. [Google Scholar] [CrossRef]
- Kim, E.; Warner, M.; Bhattacharya, I. Adaptive Step Size Incremental Conductance Based Maximum Power Point Tracking (MPPT). arXiv 2020, arXiv:2011.07649. [Google Scholar]
- Za’ter, M.E.; Miguel, S.Y.; Batarseh, M.G. Online Gradient Descent for Flexible Power Point Tracking Under a Highly Fluctuating Weather and Load. arXiv 2022, arXiv:2203.00197. [Google Scholar]
- Lin, C.-H.; Farooqui, S.A.; Liu, H.-D.; Huang, J.-J.; Fahad, M. Finite Control Set Model Predictive Control (FCS-MPC) for enhancing the performance of a single-phase inverter in a Renewable Energy System (RES). Mathematics 2023, 11, 4553. [Google Scholar] [CrossRef]
- Preeti, G.A.; Karthikeyan, A. Finite control set Model Predictive Control of three-port converter for interfacing a PV–battery energy storage system to a three-phase stand-alone AC system. Clean Energy 2024, 8, 73–84. [Google Scholar] [CrossRef]
- Le, V.-T.; Lee, H.-H. Robust finite-control-set Model Predictive Control for voltage source inverters against LC-filter parameter mismatch and variation. J. Power Electron. 2022, 22, 406–419. [Google Scholar] [CrossRef]
- Rao, R.; Kumar, A.; Bansal, R.C. Dynamic Analysis of PV Systems Using Adaptive MPPT for Maximum Power Transfer. IEEE Trans. Energy Convers. 2022, 37, 350–359. [Google Scholar]
- Baumgartner, F.; Janßen, C.; Bonhage, A.; Hillebrecht, G. Effect of Temperature and Irradiance on the Performance of PV Modules. In Proceedings of the IEEE Photovoltaic Specialists Conference (PVSC 2020), Calgary, AB, Canada, 15–19 June 2020; pp. 2450–2454. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| The open circuit voltage () | 24 V |
| The short circuit current () | 5.1 A |
| The voltage at MPP () | 17.5 V |
| The current at MPP () | 4.8 A |
| The power at MPP () | 84 W |
| Temperature coefficient of open circuit voltage (%/°C) | −0.36099 |
| Temperature coefficient of (%/°C) | 0.102 |
| Number of cells () | 20 |
| Parameter | Value/Range |
|---|---|
| Inductor (L) | 100 μH |
| Capacitor (C) | 470 μF |
| MOSFET Voltage Rating | 50 V |
| Diode Voltage Rating | 50 V |
| E/CE | PB | PM | PS | ZE | NS | NM | NB |
|---|---|---|---|---|---|---|---|
| PB | ZE | ZE | ZE | NB | NB | NB | NB |
| PM | ZE | ZE | ZE | NM | NM | NM | NM |
| PS | ZE | ZE | ZE | NS | NS | NM | NM |
| ZE | NS | NS | ZE | ZE | PS | PS | PS |
| NS | PM | PM | PS | NS | ZE | PS | ZE |
| NM | PM | PM | PM | PB | ZE | ZE | ZE |
| NB | PB | PM | PM | PB | ZE | ZE | ZE |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Dewantoro, G.; Xiao, T.; Swain, A. A Comparative Analysis of Fuzzy Logic Control and Model Predictive Control in Photovoltaic Maximum Power Point Tracking. Electronics 2025, 14, 1009. https://doi.org/10.3390/electronics14051009
Li Z, Dewantoro G, Xiao T, Swain A. A Comparative Analysis of Fuzzy Logic Control and Model Predictive Control in Photovoltaic Maximum Power Point Tracking. Electronics. 2025; 14(5):1009. https://doi.org/10.3390/electronics14051009
Chicago/Turabian StyleLi, Zehan, Gunawan Dewantoro, Tuohan Xiao, and Akshya Swain. 2025. "A Comparative Analysis of Fuzzy Logic Control and Model Predictive Control in Photovoltaic Maximum Power Point Tracking" Electronics 14, no. 5: 1009. https://doi.org/10.3390/electronics14051009
APA StyleLi, Z., Dewantoro, G., Xiao, T., & Swain, A. (2025). A Comparative Analysis of Fuzzy Logic Control and Model Predictive Control in Photovoltaic Maximum Power Point Tracking. Electronics, 14(5), 1009. https://doi.org/10.3390/electronics14051009