
SNR-Based Receiver-Type Decision Using Deep Learning for Multiple-Input Multiple-Output Detection


Abstract
1. Introduction
- We analyze the average SNR of the linear receiver to predict poor conditioned MIMO channels and present the criterion and threshold of the function for the receiver-type decision.
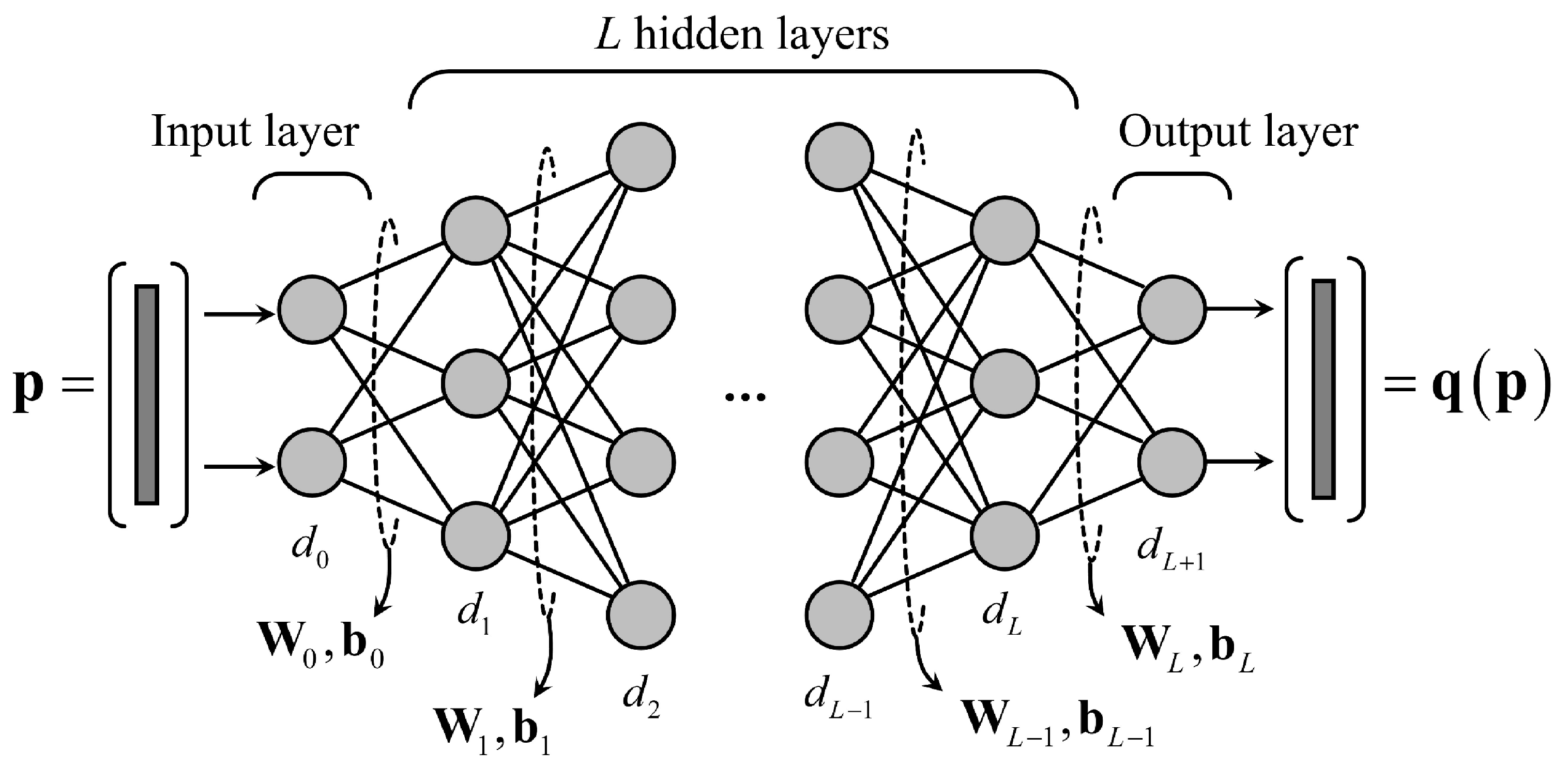
- We introduce the input features of the DNN and propose the DNN structure to model the complex relationship of the presented function.
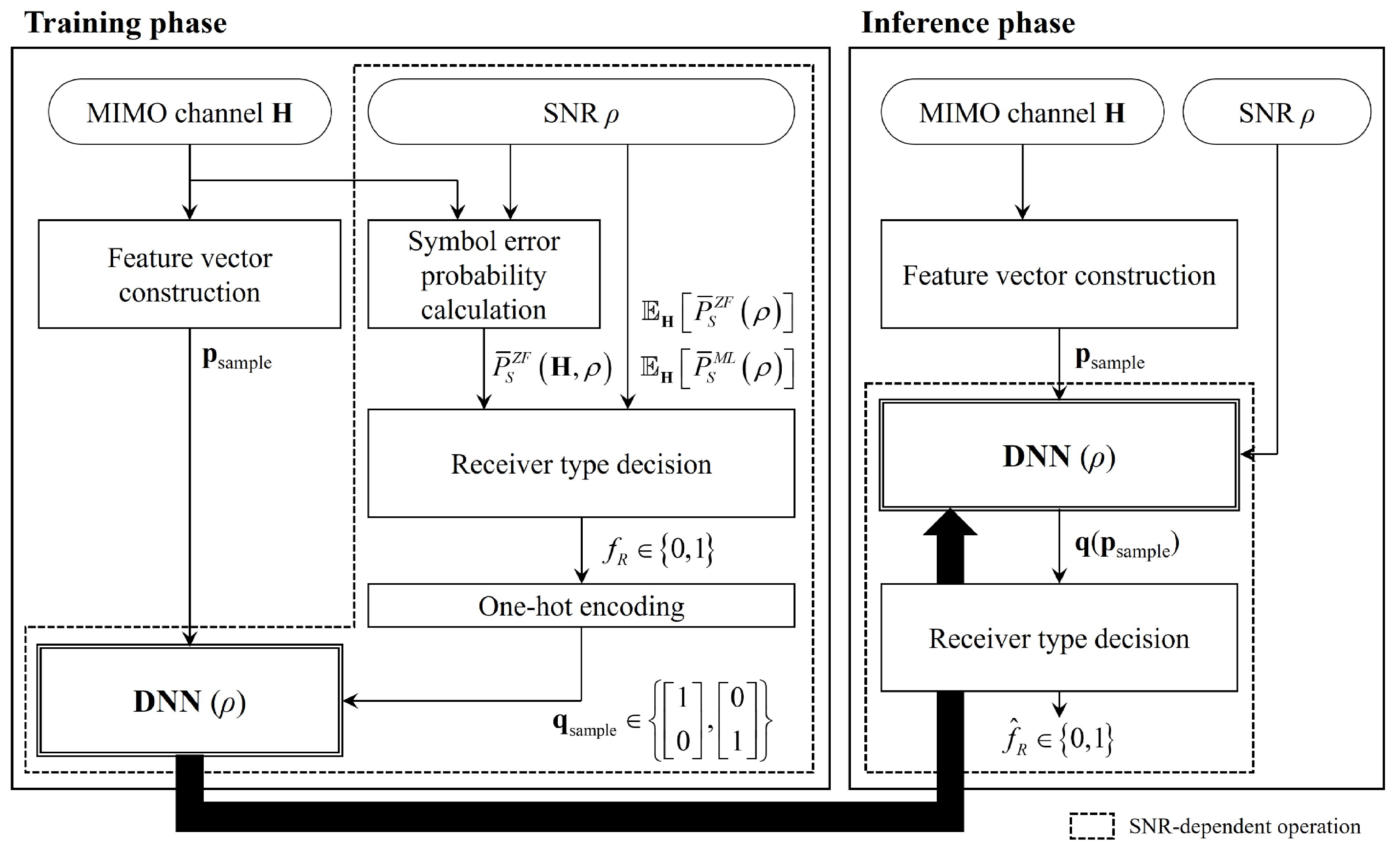
- We present the operation of the deep learning-based proposed receiver in two phases for practical implementation and analyze the computational complexity of the proposed receiver.
2. System Model
3. Proposed Deep Learning-Based MIMO Receiver
3.1. Threshold for Receiver-Type Decision
3.2. Deep Learning-Based Operation
3.3. Complexity Analysis
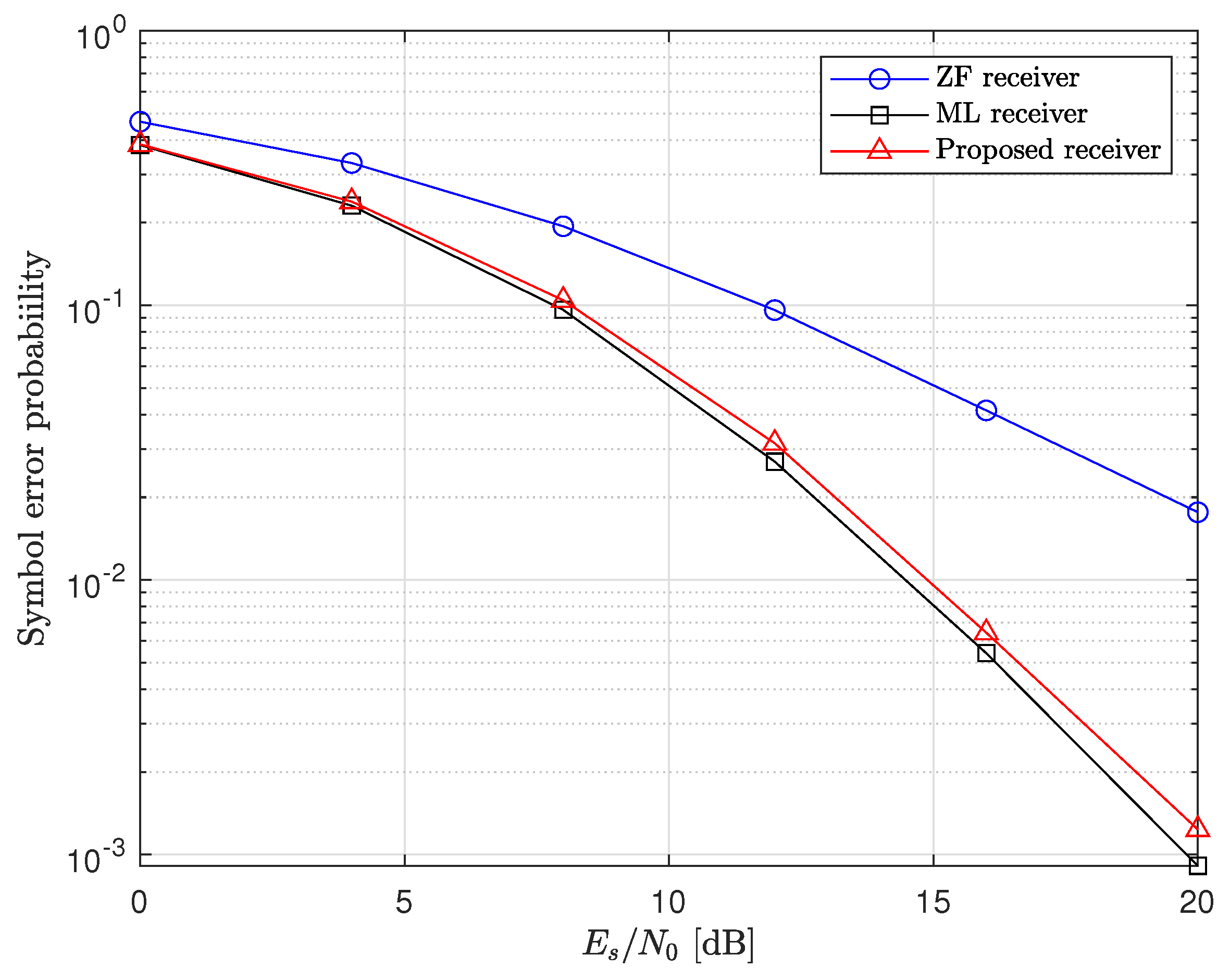
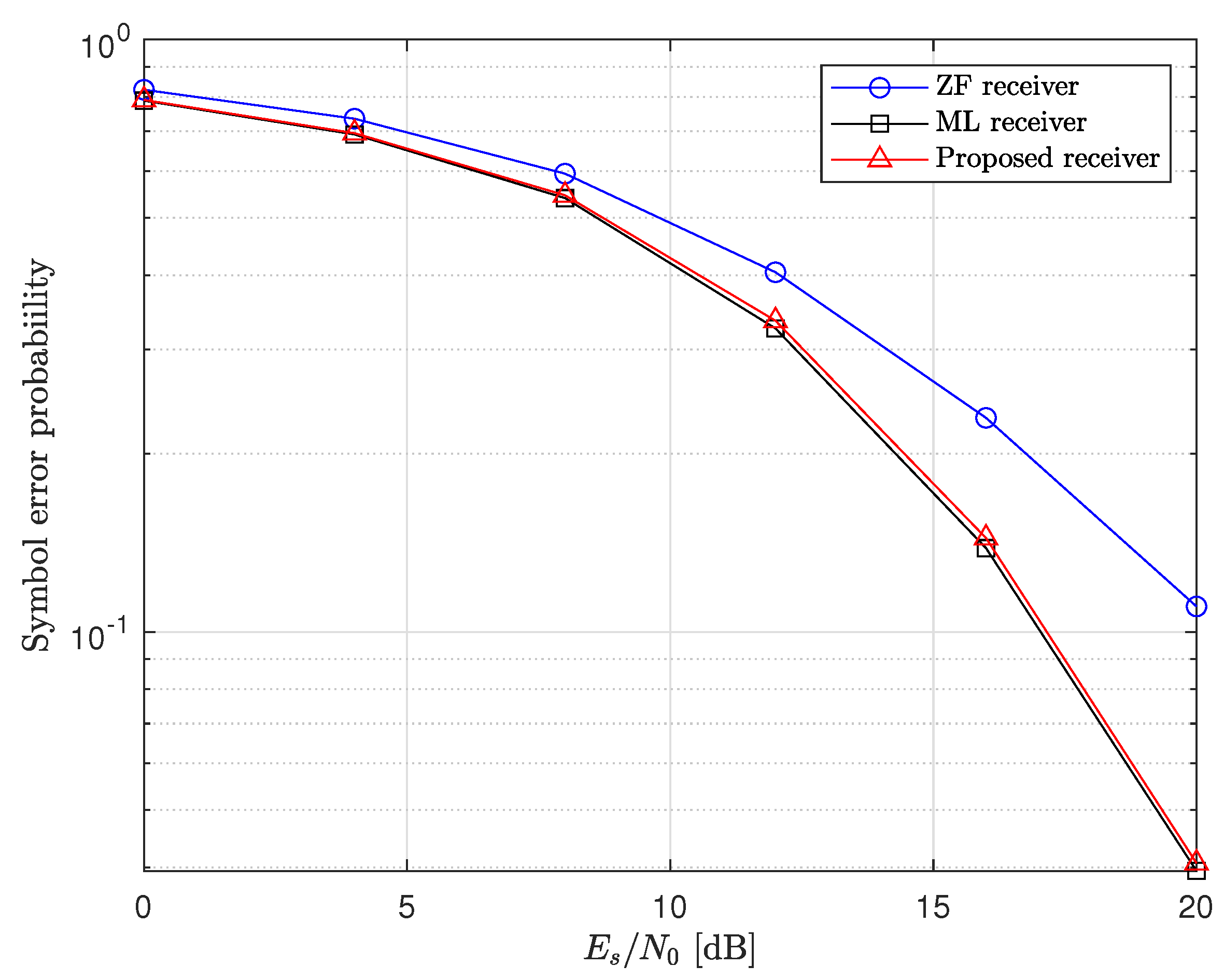
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| MIMO | Multiple-input multiple-output |
| ZF | Zero-forcing |
| MMSE | Minimum mean squared error |
| ML | Maximum likelihood |
| DetNet | Detection network |
| CSI | Channel state information |
| OAMP | Orthogonal approximate message passing |
| DNN | Deep neural network |
| SNR | Signal-to-noise ratio |
| SVD | Singular value decomposition |
| SER | Symbol error rate |
| ReLU | Rectified linear unit |
| QAM | Quadrature amplitude modulation |
References
- Paulraj, A.; Nabar, R.; Gore, D. Introduction to Space-Time Wireless Communications; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Albreem, M.A.; Juntti, M.; Shahabuddin, S. Massive MIMO detection techniquies: A survey. IEEE Commun. Surv. Tutorials 2019, 21, 3109–3132. [Google Scholar] [CrossRef]
- Fincke, U.; Pohst, M. Improved methods for calculating vectors of short length in a lattice, including a complexity analysis. Math. Comput. 1985, 44, 463–471. [Google Scholar] [CrossRef]
- Agrell, E.; Eriksson, T.; Vardy, A.; Zeger, K. Closest point search in lattices. IEEE Trans. Inf. Theory 2002, 48, 2201–2214. [Google Scholar] [CrossRef]
- Kang, J. Deep learning enabled multicast beamforming with movable antenna array. IEEE Wireless Commun. Lett. 2024, 24, 1848–1852. [Google Scholar] [CrossRef]
- Huang, H.; Peng, Y.; Yang, J.; Xia, W.; Gui, G. Fast beamforming design via deep learning. IEEE Trans. Veh. Technol. 2020, 69, 1065–1069. [Google Scholar] [CrossRef]
- Hu, Q.; Zhang, H.; Jin, S.; Li, G. Deep learning for channel estimation: Interpretation, performance, and comparison. IEEE Trans. Wireless Commun. 2021, 20, 2398–2412. [Google Scholar] [CrossRef]
- Kang, J.; Chun, C.; Kim, I. Deep learning based channel estimation for MIMO systems with received SNR feedback. IEEE Access 2020, 8, 121162–121181. [Google Scholar] [CrossRef]
- Afifi, G.; Gadallah, Y. Autonomous 3-D UAV localization using cellular networks: Deep supervised learning versus reinforcement learning approaches. IEEE Access 2021, 9, 155234–155248. [Google Scholar] [CrossRef]
- Hsieh, C.; Chen, J.; Nien, B. Deep learning-based indoor localization using received signal strength and channel state information. IEEE Access 2019, 7, 33256–33267. [Google Scholar] [CrossRef]
- Jang, S.; Lee, C. DNN-driven single-snapshot near-field localization for hybrid beamforming system. IEEE Trans. Veh. Technol. 2024, 7, 10799–10804. [Google Scholar] [CrossRef]
- Liao, J.; Zhao, J.; Gao, F.; Li, G.Y. Deep learning aided low complex sphere decoding for MIMO detection. IEEE Trans. Commun. 2022, 70, 8046–8059. [Google Scholar] [CrossRef]
- Samuel, N.; Diskin, T.; Wiesel, A. Learning to detect. IEEE Trans. Signal Process. 2019, 67, 2554–2564. [Google Scholar] [CrossRef]
- He, H.; Wen, C.-K.; Li, G.Y. Model-driven deep learning for MIMO detection. IEEE Trans. Signal Process. 2020, 68, 1702–1715. [Google Scholar] [CrossRef]
- Liao, J.; Zhao, J.; Gao, F.; Li, G.Y. A model-driven deep learning method for massive MIMO detection. IEEE Commun. Lett. 2020, 24, 1724–1728. [Google Scholar] [CrossRef]
- Yilmaz, F. On the relationships between average channel capacity, average bit error rate, outage probability, and outage capacity over additive white Gaussian noise channels. IEEE Trans. Commun. 2020, 68, 2763–2776. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Moore, E.H. On the reciprocal of the general algebraic matrix. Bull. Am. Math. Soc. 1920, 26, 294–295. [Google Scholar]
- McKay, M.R.; Collings, I.B. Capacity and performance of MIMO-BICM with zero-forcing receivers. IEEE Trans. Commun. 2005, 53, 74–83. [Google Scholar] [CrossRef]
- Proakis, J.G.; Salehi, M. Digital Communications; McGraw-Hill: New York, NY, USA, 2007. [Google Scholar]
- Zhan, J.; Nazer, B.; Erez, U.; Gastpar, M. Integer-forcing linear receiver. IEEE Trans. Inf. Theory 2014, 60, 7661–7685. [Google Scholar] [CrossRef]
- Eghbali, H.; Muhaidat, S.; Al-Dhahir, N. A low complexity two stage MMSE-based receiver for single-carrier frequency-domain equalization transmission over frequency-selective channels. In Proceedings of the GLOBECOM 2009—2009 IEEE Global Telecommunications Conference, Honolulu, HI, USA, 30 November–4 December 2009; pp. 1–6. [Google Scholar]
- Ketonen, J.; Juntti, M.; Cavallaro, J.R. Performance–complexity comparison of receivers for a LTE MIMO-OFDM system. IEEE Trans. Signal Process. 2010, 58, 3360–3372. [Google Scholar] [CrossRef]
- Siriteanu, C.; Miyanaga, Y.; Blostein, S.D.; Kuriki, S.; Shi, X. MIMO zero-forcing detection analysis for correlated and estimated Rician fading. IEEE Trans. Veh. Technol. 2012, 61, 3087–3099. [Google Scholar] [CrossRef]
- Yoo, T.; Goldsmith, A. On the optimality of multiantenna broadcast scheduling using zero-forcing beamforming. IEEE J. Sel. Areas Commun. 2006, 24, 528–541. [Google Scholar]
- Zhu, B.; Wang, J.; He, L.; Song, J. Joint transceiver optimization for wireless communication PHY using Neural network. IEEE J. Sel. Areas Commun. 2019, 37, 1364–1373. [Google Scholar] [CrossRef]
- Dai, X.; Zou, R.; An, J.; Li, X.; Sun, S.; Wang, Y. Reducing the complexity of quasi-maximum-likelihood detectors through companding for coded MIMO systems. IEEE Veh. Technol. 2012, 61, 1109–1123. [Google Scholar] [CrossRef]
- Sim, D.; Kim, K.; Kim, C.; Lee, C. A signal-level maximum likelihood detection based on partial candidates for MIMO FBMC-QAM system with two prototype filters. IEEE Veh. Technol. 2019, 68, 2598–2608. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Number of transmit antennas, | 2, 4 |
| Number of receiver antennas, | 2, 4 |
| Modulation scheme | QAM |
| Modulation order, M | 4, 16 |
| Energy per symbol to noise spectral density ratio, | 0, 4, 8, 12, 16, 20 dB |
| Threshold for receiver-type decision, | 0.8146, 0.6893, 0.4802, 0.2622, 0.1231, 0.0538 for , 4−QAM |
| 0.9600, 0.9444, 0.9133, 0.8243, 0.6249, 0.3883 for , 16−QAM | |
| 0.9339, 0.9209, 0.8864, 0.8196, 0.7324, 0.6424 for , 4−QAM | |
| 0.9370, 0.9573, 0.9914, 1.0970, 1.6050, 3.4955 for , 16−QAM |
| Parameters | Values |
|---|---|
| Number of nodes of input, output layers, | 10, 2 for |
| 36, 4 for | |
| Number of nodes of hidden layers, | |
| Learning rate | |
| Number of epochs | 200 |
| Batch size | 16 |
| Optimizer | Adam |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.; Sim, D. SNR-Based Receiver-Type Decision Using Deep Learning for Multiple-Input Multiple-Output Detection. Electronics 2025, 14, 335. https://doi.org/10.3390/electronics14020335
Lee S, Sim D. SNR-Based Receiver-Type Decision Using Deep Learning for Multiple-Input Multiple-Output Detection. Electronics. 2025; 14(2):335. https://doi.org/10.3390/electronics14020335
Chicago/Turabian StyleLee, Sanggeun, and Dongkyu Sim. 2025. "SNR-Based Receiver-Type Decision Using Deep Learning for Multiple-Input Multiple-Output Detection" Electronics 14, no. 2: 335. https://doi.org/10.3390/electronics14020335
APA StyleLee, S., & Sim, D. (2025). SNR-Based Receiver-Type Decision Using Deep Learning for Multiple-Input Multiple-Output Detection. Electronics, 14(2), 335. https://doi.org/10.3390/electronics14020335