Permanent magnet synchronous motors (PMSMs) are widely used in high-end equipment, such as rail transportation, CNC machine tools, aircraft, robots, and agricultural machinery automation [
1,
2,
3], due to their high efficiency, high power density, and high reliability [
4,
5,
6,
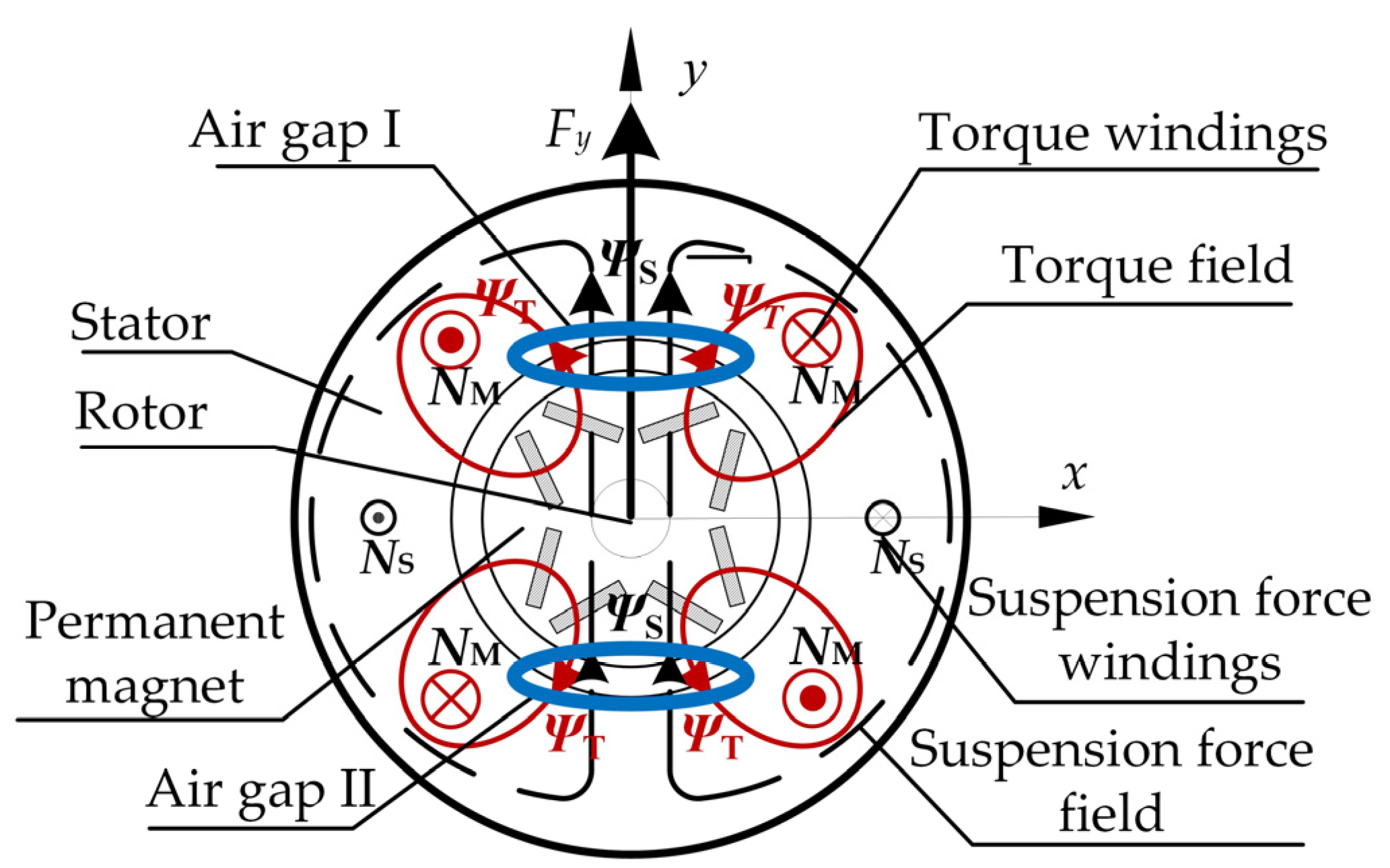
7]. Compared with the PMSM, the interior permanent magnet synchronous motor (IPMSM) has the advantages of better demagnetization resistance, high power density, and a wide speed regulation range. The bearingless interior permanent magnet synchronous motor (BIPMSM) combines the IPMSM and magnetic suspension technology, which is a breakthrough and innovation in electromechanical drive systems. The torque windings and suspension force windings are embedded in the stator of the BIPMSM. By designing these windings with the pole pair numbers differing by 1, the suspension force control can be realized by changing the suspension force windings current. By incorporating magnetic suspension technology, the BIPMSM not only retains the advantages of the IPMSM but also achieves the advantages of no friction, no mechanical wear, low noise, and long service life, which meets the requirements of clean, corrosion-resistant, and high-speed operating environments, leading to widespread applications in aerospace, biomedicine, chemical processing, and other high-tech sectors [
8,
9].
Especially in the context of flywheel battery system research, the BIPMSM meets the characteristics of high speed, high efficiency, and a wide range of adjustable speeds required by flywheel battery systems. These applications place high demands on the torque performance and suspension force performance of BPMSMs. Therefore, it is crucial to study the relationship between the target performance and motor parameters in the BIPMSM design, such as the distribution and size of the permanent magnets built into the permanent magnet synchronous motor and the design of the motor stator slots. At the same time, these motor parameters are complex and numerous, so they need to be optimized through multi-objective optimization. To identify an optimal solution ensuring stabilization of motor torque and suspension force, parameter design optimization for the BIPMSM increasingly employs intelligent algorithms such as differential evolution, multi-objective particle swarm optimization, and genetic algorithms [
10,
11,
12,
13,
14,
15]. In [
16], a pole optimization design method based on unequal amplitude modulation is proposed, with optimization objectives of torque enhancement and suspension performance improvement. According to this method, the optimized unequal amplitude modulation pole structure effectively mitigates the motor’s cogging effect while simultaneously enhancing both torque and suspension performance. In [
17], a design method of BPMSM based on electromagnetic computation is proposed. According to this method, the short pitch winding structure and the cosine shape of permanent magnets are used, which can effectively suppress the high harmonics and improve the magnetic field distribution in the BPMSM. In [
18], a new permanent magnet rotor structure is proposed. By finite element analysis (FEA), the proposed permanent magnet rotor configuration is demonstrated to significantly improve motor suspension performance. In [
19], an innovative single-winding topology for six-phase BPMSM is proposed. FEA was conducted to simulate the proposed motor model, which verified that this method can improve the torque performance and suspension performance of the motor. All the optimization methods in the above literature improve the motor performance to some extent, but they only focus on a single or a small number of optimization variables during the optimization and tend to rely on the finite element analysis results, which leads to an overly cumbersome optimization process. The BIPMSM, on the other hand, has high requirements for both torque and suspension performance, so multi-objective optimization design is introduced into bearingless motors. In [
20], an outer rotor coreless BPMSM was designed, with its torque and suspension performance co-optimized through an integrated Taguchi–response surface methodology (T-RSM). In [
21], a five-phase BPMSM with 10 slots and 8 poles was proposed, employing an integrated approach of response surface methodology (RSM) and multi-objective optimization to optimize torque and suspension performance. The optimization results demonstrated that this approach could effectively improve both torque output and suspension performance. In [
22], a 10 kW, 100k rpm ultra-high-speed BPMSM incorporating auxiliary slots was designed, where multi-objective optimization methods were employed to simultaneously reduce eddy current losses and improve electromagnetic performance of the motor. The above-mentioned multi-objective optimization algorithms in the literature have positive results for the optimization of the target motor. However, most optimization algorithms primarily focus on surface-mounted BPMSMs, with limited research on BIPMSMs. Compared to surface-mounted designs, BIPMSMs offer superior demagnetization resistance and a wider speed regulation range, making them more suitable for high-speed applications. Therefore, this paper employs the multi-objective whale optimization algorithm (MOWOA) to optimize the design of the BIPMSM. MOWOA has better diversity and intergenerational distance characteristics; it has advantages in balancing global search and local optimization, thereby reducing the risk of getting stuck in a local optimum [
23].
This paper takes performance indicators such as torque and suspension force of the BIPMSM as optimization targets and the motor stator slot and permanent magnet structure as optimization variables. Sensitivity analysis sifts dominant design parameters, while response surface methodology (RSM) derives relationship equations between optimization objectives and optimization variables. R2, RMSE, and cross-validation methods were used to verify the fit of the regression fitting equation. Finite element simulation of the optimized BIPMSM parameters and pre-/post-optimization performance comparison verified NSWOA’s effectiveness.
The main objective of this paper is to design a multi-objective optimization design scheme for the BIPMSM based on MOWOA. Firstly, the BIPMSM suspension force generation mechanism and motor structure are introduced in
Section 2; the FEA verifies the suspension force generation mechanism. The detailed process of optimization is described in
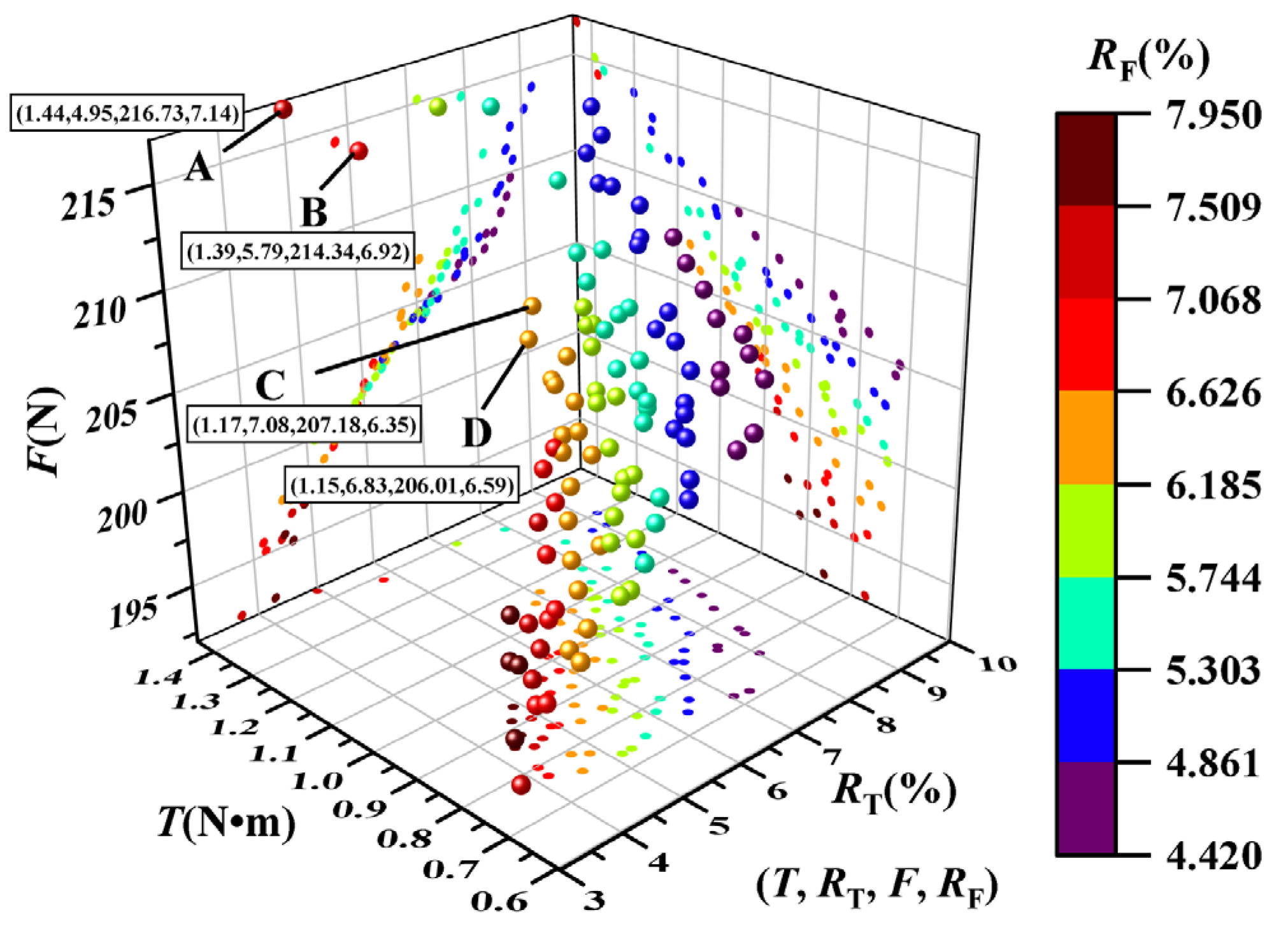
Section 3, including the optimization objectives, determination of optimization variables, sensitivity analysis, response surface method modeling, and generation of Pareto front using MOWOA. Through comparative validation, it can be seen that MOWOA-optimized BIPMSM structural parameters can lead to a combined optimal performance of each objective. Finally,
Section 4 summarizes the paper.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}