
Research on the Vibration Sensor Based on Microfiber Loop Resonator



Abstract
1. Introduction
2. Materials and Methods
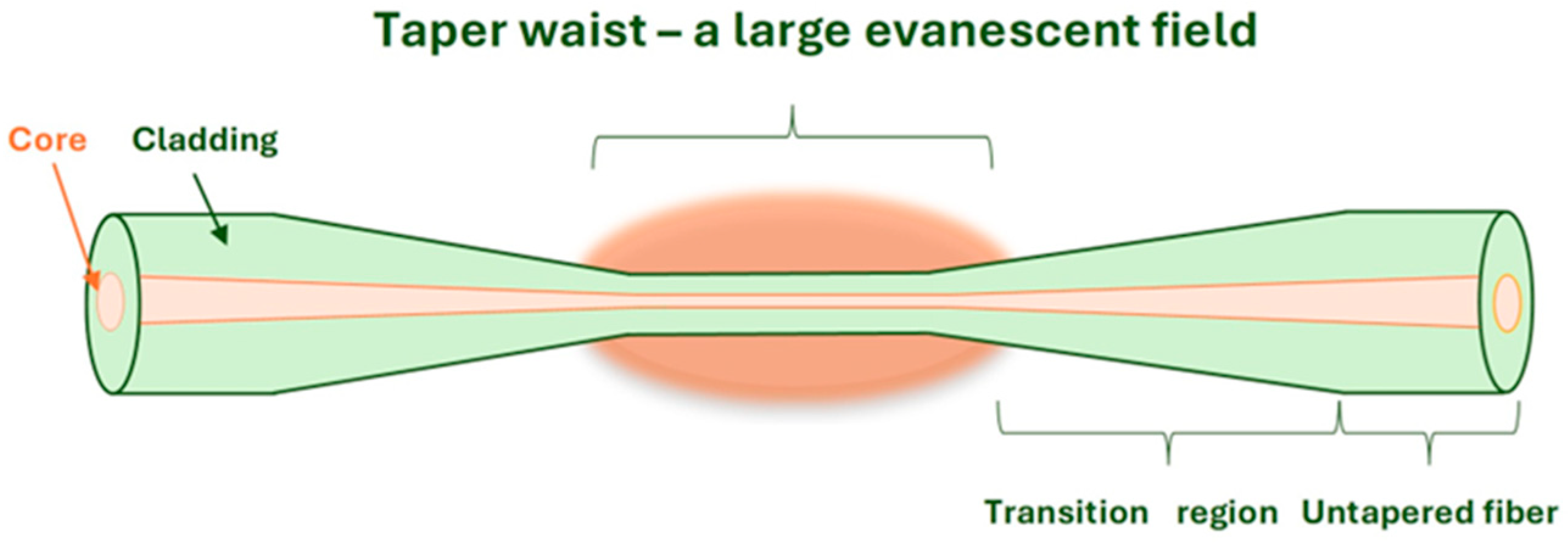
- The production of various types of TOFs with micrometer-scale precision, characterized by different waist regions (long, short, or point-shaped), depending on the duration of the flame–fiber interaction.
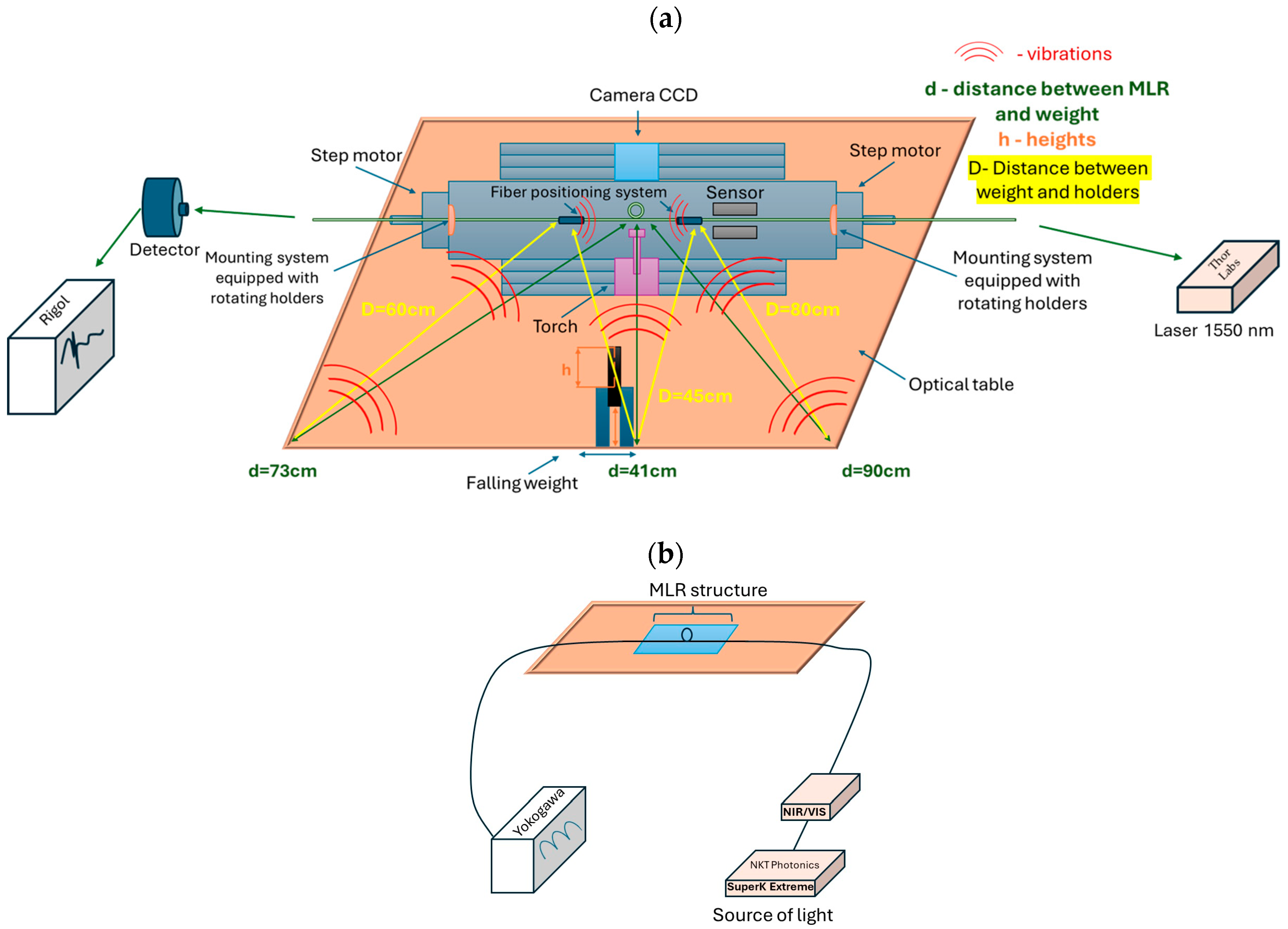
- The fabrication of low-loss structures, with continuous loss monitoring during the elongation process made possible by additional equipment (from Thorlabs, Newton, MA, USA), including the S3FC1550 laser light source and the S144A detector operating in the 800–1700 nm wavelength range, connected to the PM300E power meter and display.
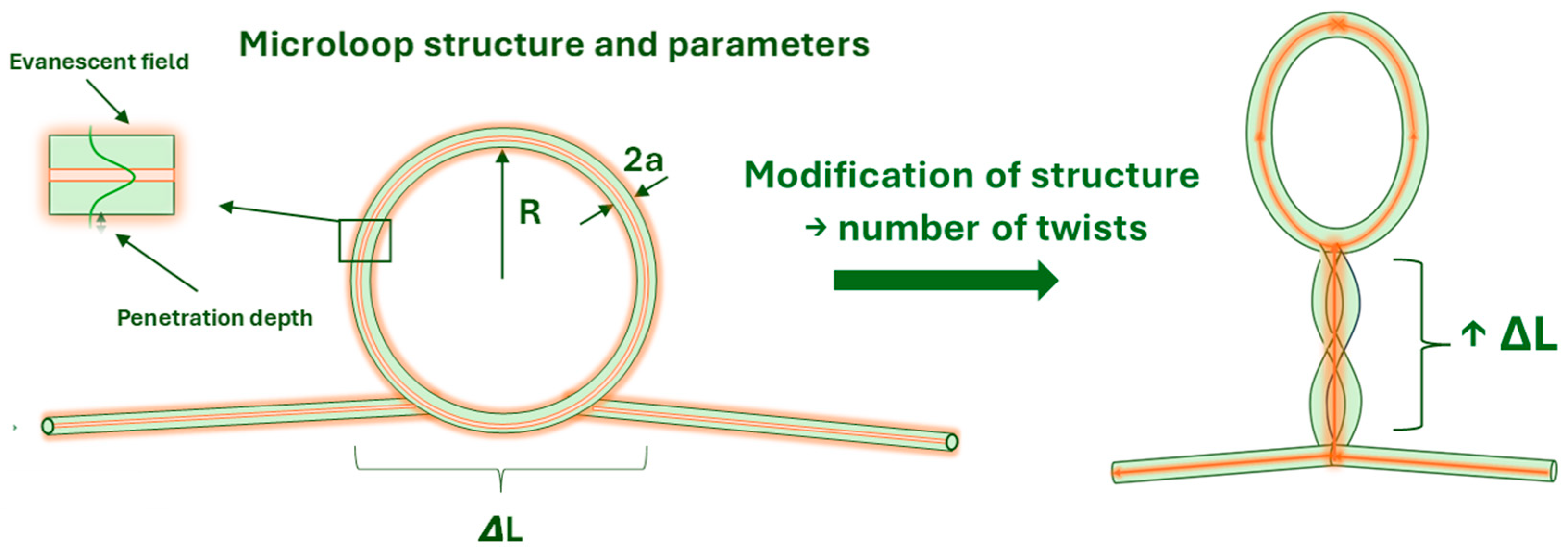
- The rotation of the TOF and its direct integration into the MLR system with varying numbers of twists, thanks to movable motors (forward and backwards) and a fiber mounting system equipped with rotating holders.
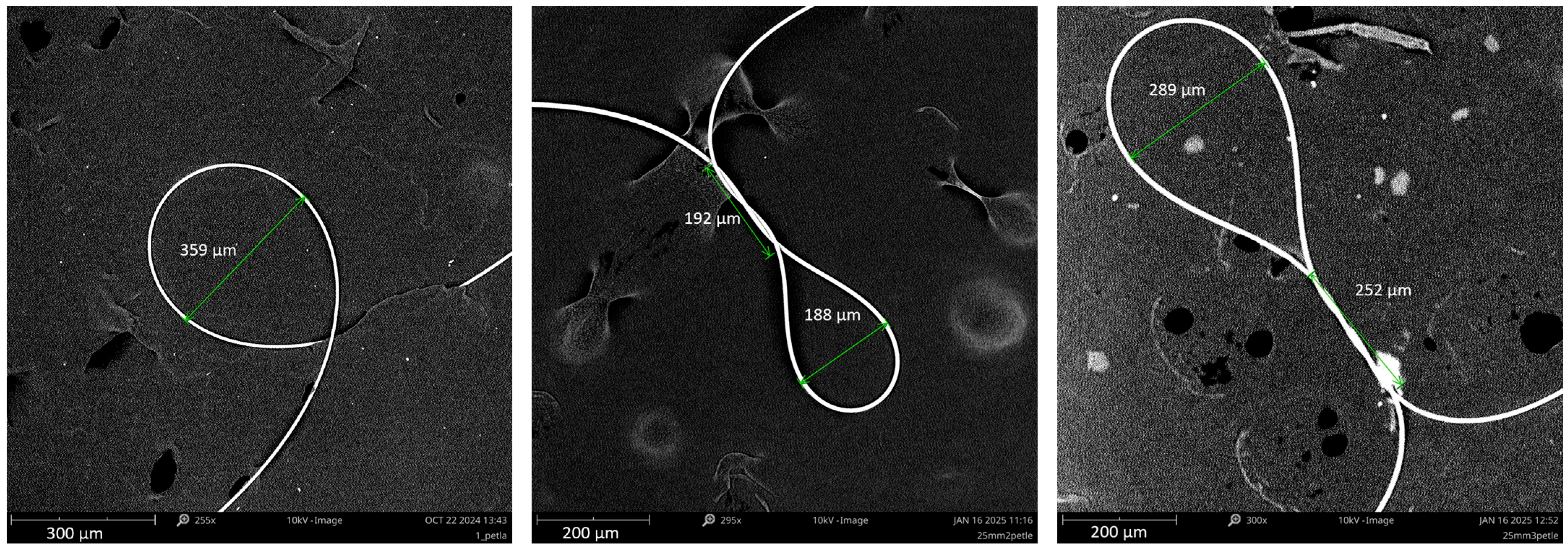
- Step 1: The prefabricated TOF, mounted on the FOTET setup, was initially under tension. To release this tension, the stepper motors must be manually moved toward each other using micrometric screws that allow precise positioning.
- Step 2: Once the optical fiber is no longer under tension, a loop can be formed using the rotatable fiber holders. These holders were gently rotated until the desired number of twists was achieved, and the loop was fully formed.
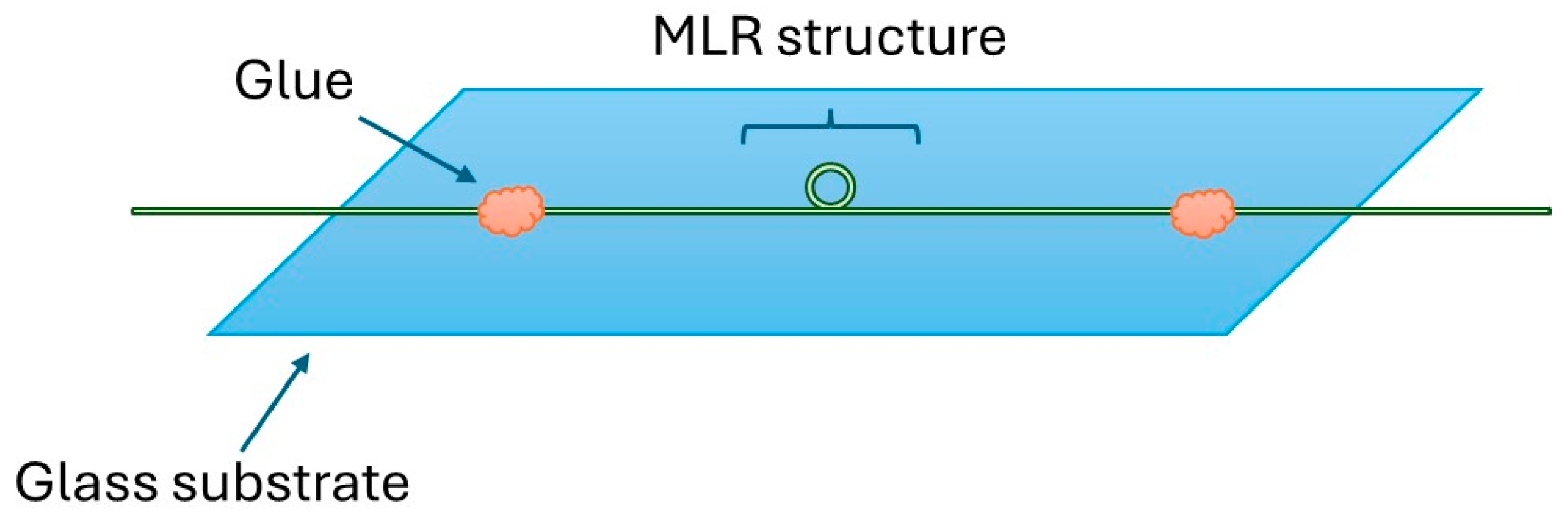
- Step 3: Finally, the stepper motors were moved away from each other, again using micrometric screws, to minimize the loop size and achieve the optimal structure for sensing.
3. Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pura, P.; Szymański, M.; Dudek, M.; Jaroszewicz, L.R.; Marć, P.; Kujawińska, M. Polymer microtips at different types of optical fibers as functional elements for sensing applications. J. Light. Technol. 2015, 33, 2398–2404. [Google Scholar] [CrossRef]
- Dudek, M.; Kujawińska, M. Optonumerical method for improving functional parameters of polymer microtips. Opt. Eng. 2018, 57, 014101. [Google Scholar] [CrossRef]
- Kurzych, A.; Jaroszewicz, L. A Review of Rotational Seismology Area of Interest from a Recording and Rotational Sensors. Sensors 2024, 24, 7003. [Google Scholar] [CrossRef] [PubMed]
- Brambilla, G.; Xu, F.F.; Horak, P.; Jung, Y.; Koizumi, F.; Sessions, N.P.; Koukharenko, E.; Feng, X.; Murugan, G.S.; Wilkinson, J.S.; et al. Optical fiber nanowires and microwires: Fabrication and applications. Adv. Opt. Photonics 2009, 1, 107–161. [Google Scholar] [CrossRef]
- Sumetsky, M.; Dulashko, Y.; Fini, J.M.; Hale, A.; DiGiovanni, D.J. The microfiber loop resonator: Theory, experiment, and application. J. Light. Technol. 2006, 24, 242–250. [Google Scholar] [CrossRef]
- Zheng, Y.; Dong, X.; Zhao, C.; Li, Y.; Shao, L.; Jin, S. Relative Humidity Sensor Based on Microfiber Loop Resonator. Adv. Mater. Sci. Eng. 2013, 2013, 815930. [Google Scholar] [CrossRef]
- Chen, H.; Shao, Z.; Hao, Y.; Rong, Q. A high-frequency hydrophone using an optical fiber microknot resonator. Opt. Commun. 2019, 446, 77–83. [Google Scholar] [CrossRef]
- Yang, H.; Kong, L.; Li, L.; Wang, Y.; Li, X.; Wang, X.; Bo, Y.; Wang, Y.; Wei, Q.; Lu, X. Enhanced-sensitive dual microfiber knot resonators based sensor with vernier effect for simultaneous measurement of refractive index and temperature. Optik 2022, 250, 168350. [Google Scholar] [CrossRef]
- Zhang, Y.N.; Gao, J.; Xia, F.H.B.; Zhao, Y. Microfiber Knot Resonators: Structure, Spectral Properties, and Sensing Applications. Laser Photonics Rev. 2024, 18, 2300765. [Google Scholar] [CrossRef]
- Shen, T.H.; Wang, L.A. A Two-Layer Microcoil Resonator With Very High Quality Factor. IEEE Photonics Technol. Lett. 2014, 26, 535–537. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, T.; Rao, Y.J.; Gong, Y. Miniature interferometric humidity sensors based on silica/polymer microfiber knot resonators. Sens. Actuators B Chem. 2011, 155, 258–263. [Google Scholar] [CrossRef]
- Lee, Y.; Xu, Z.; Tan, S.; Fang, F. Recent advances in microfiber sensors for highly sensitive biochemical detection. J. Phys. D Appl. Phys. 2019, 52, 493002. [Google Scholar]
- Ismaeel, R.; Lee, T.; Ding, M.; Broderick, N.G.R. Nonlinear microfiber loop resonators for resonantly enhanced third harmonic generation. Opt. Lett. 2012, 37, 5121–5123. [Google Scholar] [CrossRef]
- Ismaeel, R.; Gouveia, M.A.L.T.; Codemard, C.A.; Brambilla, G. Enhanced Second Harmonic Generation in Microfiber Loop Resonators. In Proceedings of the 2013 Conference on Lasers and Electro-Optics—International Quantum Electronics Conference, Munich, Germany, 12–16 May 2013. [Google Scholar]
- Zhai, X.; Zhang, W.; Cui, J.; Huang, H.; Wang, Y.; Zhang, G.; Wang, R.; Yang, Y.; Wang, Y. Underwater acoustic sensor based on microfiber knot resonator. Opt. Fiber Technol. 2024, 84, 103711. [Google Scholar] [CrossRef]
- Huang, H.; Cui, J.; Zhang, W.; Zhang, G.; Wang, R.; Yang, Y.Y.; Wang, Y. A microfiber knot resonator for ultrasonic underwater detection. Opt. Fiber Technol. 2025, 91, 104152. [Google Scholar] [CrossRef]
- Liu, C.; Zhang, J.; Li, Q.; Su, L.; Fu, X.; Jin, W.; Bi, W.; Fu, G. Ultrasound detection based on optical tapered-knot resonator sensor. Sens. Actuators A. Phys. 2024, 396, 115214. [Google Scholar] [CrossRef]
- Sun, L.; Li, J.; Tan, Y.; Shen, X.; Xie, X.; Gao, S.; Guan, B.O. Miniature highly-birefringent microfiber loop with extremely-high refractive index sensitivity. Opt. Express 2012, 20, 10180–10185. [Google Scholar] [CrossRef]
- Xu, F.; Horak, P.; Brambilla, G. Optical microfiber coil resonator refractometric sensor. Opt. Express 2007, 15, 7888–7893. [Google Scholar] [CrossRef]
- Irawati, N.; Rahman, H.; Ahmad, H.; Harun, S. A PMMA microfiber loop resonator based humidity sensor with ZnO nanorods coating. Measurement 2017, 99, 128–133. [Google Scholar] [CrossRef]
- Yi, Y.; Jiang, Y.; Zhao, H.; Brambilla, G.; Fan, Y. High-Sensitivity Humidity Sensor Based on Microknot Resonator Assisted Agarose-Coated Mach-Zehnder Interferometer. J. Light. Technol. 2022, 40, 2191–2196. [Google Scholar] [CrossRef]
- Talataisong, W.; Ismaeel, R.; Masoudi, A.; Beresna, M.; Brambilla, G. Magnetic field sensor based on multi-port microcoil resonator. In Proceedings of the 25th International Conference on Optical Fiber Sensors, Jeju, Republic of Korea, 24–28 April 2017; Volume 1032309. [Google Scholar]
- Lakomski, M.; Guzowski, B.; Wozniak, A. Fabrication of ultra-long tapered optical fibers. Microelectron. Eng. 2020, 221, 111193. [Google Scholar] [CrossRef]
- Wang, Q.; Jing, J.-Y.; Wang, B.-T.; Li, S. Recent progress and applications of optical microfiber and nanofiber devices. Instrum. Sci. Technol. 2019, 47, 117–139. [Google Scholar] [CrossRef]
- Korec-Kosturek, J.; Moś, J.E. Advances in Optical Microfibers: From Fabrication to Functionalization and Sensing Applications. Materials 2025, 18, 2418. [Google Scholar] [CrossRef] [PubMed]
- Memon, S.F.; Ali, M.M.; Pembroke, J.T.; Chowdhry, B.S. Measurement of Ultralow Level Bioethanol Concentration for Production Using Evanescent Wave Based Optical Fiber Sensor. IEEE Trans. Instrum. Meas. 2018, 67, 780–788. [Google Scholar] [CrossRef]
- Stasiewicz, K.A.; Jakubowska, I.; Moś, J.E.; Kosturek, R.; Kowiorski, K. In-Line Gas Sensor Based on the Optical Fiber Taper Technology with a Graphene Oxide Layer. Electronics 2023, 12, 830. [Google Scholar] [CrossRef]
- Tian, Y.; Wang, W.; Wu, N.; Zou, X.; Wang, X. Tapered Optical Fiber Sensor for Label-Free Detection of Biomolecules. Sensors 2011, 11, 3780–3790. [Google Scholar] [CrossRef]
- Chen, G.Y. A Review of Microfiber and Nanofiber Based Optical Sensors. Open Opt. J. 2014, 7, 32. [Google Scholar] [CrossRef]
- Lee, T.; Broderick, N.G.R.; Brambilla, G. Resonantly enhanced third harmonic generation in microfiber loop resonators. J. Opt. Soc. Am. B 2013, 30, 505–511. [Google Scholar] [CrossRef]
- Luo, W.; Chen, Y.; Xu, F. Recent Progress in Microfiber-Optic Sensors. Photonic Sens. 2021, 11, 45–68. [Google Scholar] [CrossRef]
- Shi, L.; Xu, Y.; Tan, W.; Chen, X. Simulation of Optical Microfiber Loop Resonators for Ambient Refractive Index Sensing. Sensors 2007, 7, 689–696. [Google Scholar] [CrossRef]
- Sumesky, M. Optical fiber microcoil resonator. Opt. Express 2004, 12, 2303–2316. [Google Scholar] [CrossRef] [PubMed]
- Lou, N.; Jha, R.; Domínguez-Juárez, J.L.; Finazzi, V.; Villatoro, J.; Badenes, G.; Pruneri, V. Embedded optical micro/nano-fibers for stable devices. Opt. Lett. 2010, 35, 571–573. [Google Scholar] [CrossRef] [PubMed]
- Jali, M.H.; Rafis, R.H.R.A.; Johari, M.A.M.; Baharom, M.F.; Ahmad, A.; Yusof, H.H.M.; Harun, S.W. Optical Microfiber Sensor: A Review. J. Phys. Conf. Ser. 2021, 2075, 012021. [Google Scholar] [CrossRef]
- Chunyang, H.; Hui, D.; Xianli, L.; Shaofei, D. Temperature insensitive refractive index sensor based on single-mode micro-fiber Sagnac loop interferometer. Appl. Phys. Lett. 2014, 104, 181906. [Google Scholar] [CrossRef]
- Kurzych, A.; Jaroszewicz, L.; Kowalski, J. Development of Three-Axis Fibre-Optic Seismograph for Direct and Autonomous Monitoring of Rotational Events with Perspective of Historical Review. Sensors 2022, 22, 8902. [Google Scholar] [CrossRef]
- Shahal, S.; Duadi, H.L.Y.; Fridman, M. Complex Fiber Micro-Knots. Sensors 2018, 18, 1273. [Google Scholar] [CrossRef]
- Korec-Kosturek, J.; Stasiewicz, K.A.; Strzezysz, O.; Kula, P.; Jaroszewicz, L.R. Electro-Steering Tapered Fiber-Optic Device with Liquid Crystal Cladding. J. Sens. 2019, 2019, 1617685. [Google Scholar] [CrossRef]
- Mos, J.E.; Stasiewicz, K.A.; Matras-Postołek, K.; Jaroszewicz, L.R. Thermo-Optical Switching Effect Based on a Tapered Optical Fiber and Higher Alkanes Doped with ZnS:Mn. Materials 2020, 13, 5044. [Google Scholar] [CrossRef]
- Corning. Available online: https://www.corning.com/media/worldwide/coc/documents/Fiber/product-information-sheets/PI-1424-AEN.pdf (accessed on 6 February 2025).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| A Straight TOF | l1 = 20 mm | l2 = 25 mm | |||||
|---|---|---|---|---|---|---|---|
| d (cm) | 41 | 73 | 90 | 41 | 73 | 90 | |
| h (cm) | |||||||
| 1 | 35.9 | 31.9 | 39.9 | 67.9 | 51.9 | 95.8 | |
| 7 | 35.9 | 35.9 | 35.9 | 83.8 | 79.8 | 103.8 | |
| 14 | 39.9 | 31.3 | 35.9 | 87.8 | 87.8 | 103.8 | |
| 1 Twist | l1 = 20 mm | l2 = 25 mm | |||||
|---|---|---|---|---|---|---|---|
| d (cm) | 41 | 73 | 90 | 41 | 73 | 90 | |
| h (cm) | |||||||
| 1 | 51.9 | 35.9 | 55.9 | 51.9 | 43.9 | 71.8 | |
| 7 | 67.9 | 47.9 | 75.9 | 71.9 | 63.9 | 91.8 | |
| 14 | 75.9 | 63.9 | 71.9 | 95.8 | 79.8 | 103.8 | |
| 2 Twists | l1 = 20 mm | l2 = 25 mm | |||||
|---|---|---|---|---|---|---|---|
| d (cm) | 41 | 73 | 90 | 41 | 73 | 90 | |
| h (cm) | |||||||
| 1 | 39.9 | 39.9 | 39.9 | 75.8 | 43.9 | 83.8 | |
| 7 | 43.9 | 47.9 | 47.9 | 115.8 | 71.9 | 123.8 | |
| 14 | 51.9 | 59.9 | 51.9 | 127.7 | 67.9 | 123.8 | |
| 3 Twists | l1 = 20 mm | l2 = 25 mm | |||||
|---|---|---|---|---|---|---|---|
| d (cm) | 41 | 73 | 90 | 41 | 73 | 90 | |
| h (cm) | |||||||
| 1 | 57.1 | 38.6 | 38.1 | 63.6 | 89.1 | 68.2 | |
| 7 | 124.6 | 113.4 | 106.1 | 93.6 | 220.1 | 130.3 | |
| 14 | 127.8 | 133.6 | 106.1 | 111.4 | 231.5 | 96.3 | |
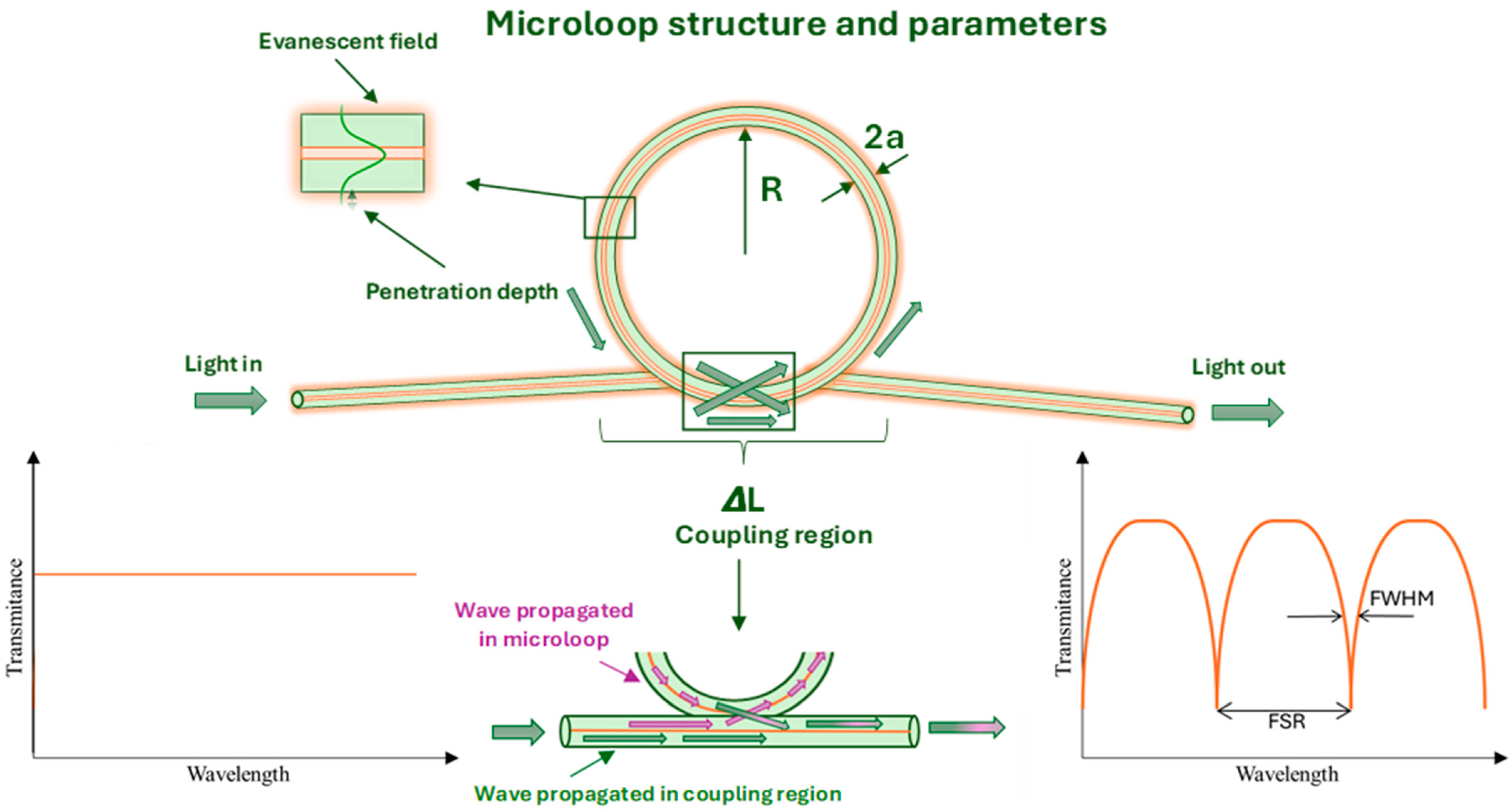
| Number of Twists | |||
|---|---|---|---|
| 1 | 2 | 3 | |
| FSR (nm) | 0.9 | 0.87 | 0.8 |
| FWHM (nm) | 0.5 | 0.32 | 0.3 |
| λres (nm) | 1229.2 | 1228.3 | 1252 |
| Q-factor | 2.4 × 103 | 3.8 × 103 | 4.1 × 103 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mojkowski, M.; Moś, J.E.; Korec-Kosturek, J.; Stasiewicz, K.A. Research on the Vibration Sensor Based on Microfiber Loop Resonator. Electronics 2025, 14, 2619. https://doi.org/10.3390/electronics14132619
Mojkowski M, Moś JE, Korec-Kosturek J, Stasiewicz KA. Research on the Vibration Sensor Based on Microfiber Loop Resonator. Electronics. 2025; 14(13):2619. https://doi.org/10.3390/electronics14132619
Chicago/Turabian StyleMojkowski, Maciej, Joanna E. Moś, Joanna Korec-Kosturek, and Karol A. Stasiewicz. 2025. "Research on the Vibration Sensor Based on Microfiber Loop Resonator" Electronics 14, no. 13: 2619. https://doi.org/10.3390/electronics14132619
APA StyleMojkowski, M., Moś, J. E., Korec-Kosturek, J., & Stasiewicz, K. A. (2025). Research on the Vibration Sensor Based on Microfiber Loop Resonator. Electronics, 14(13), 2619. https://doi.org/10.3390/electronics14132619