
Machine Learning-Driven Truck–Drone Collaborative Delivery for Time- and Energy-Efficient Last-Mile Deliveries



Abstract
1. Introduction
2. Literature Review
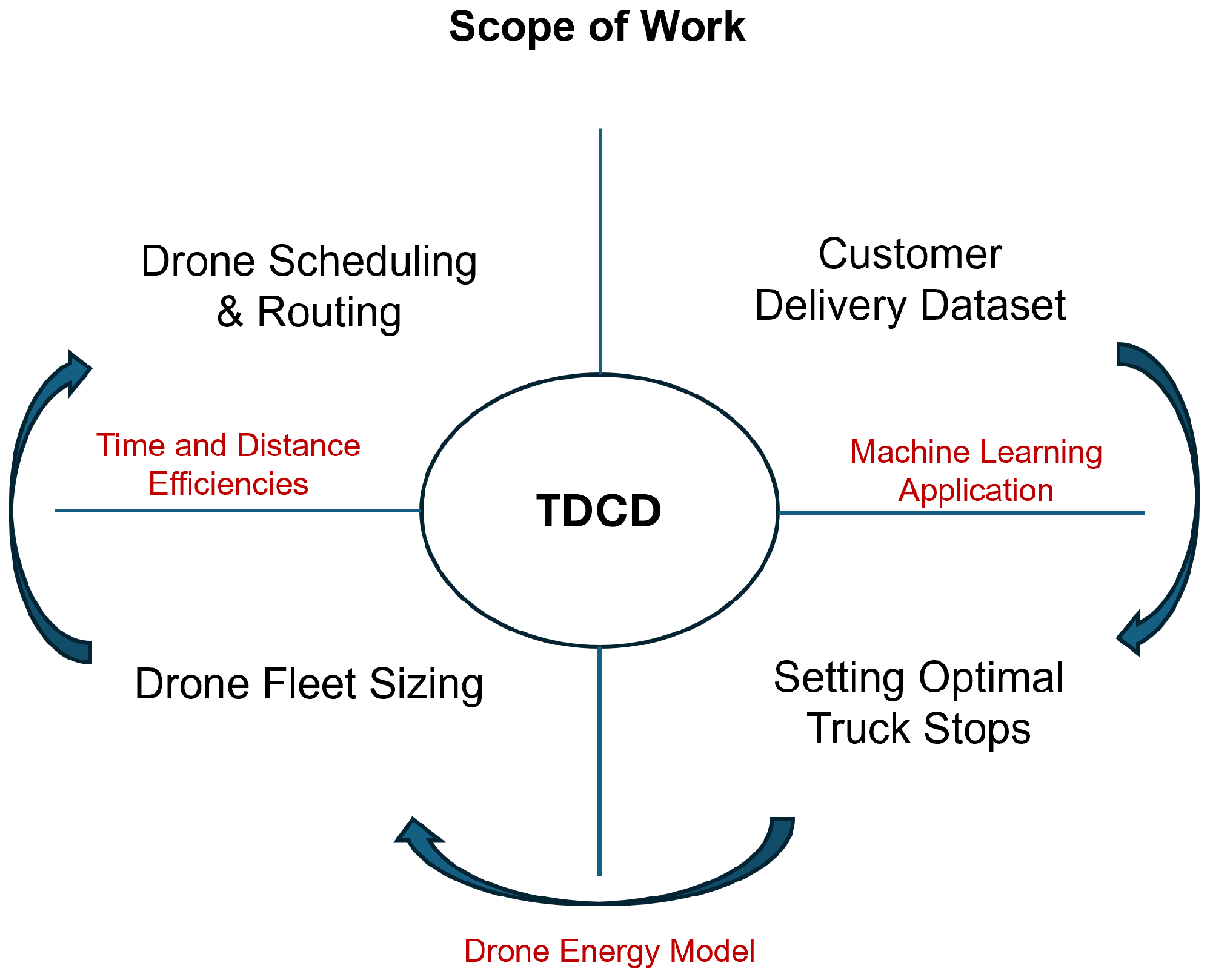
3. Methodology
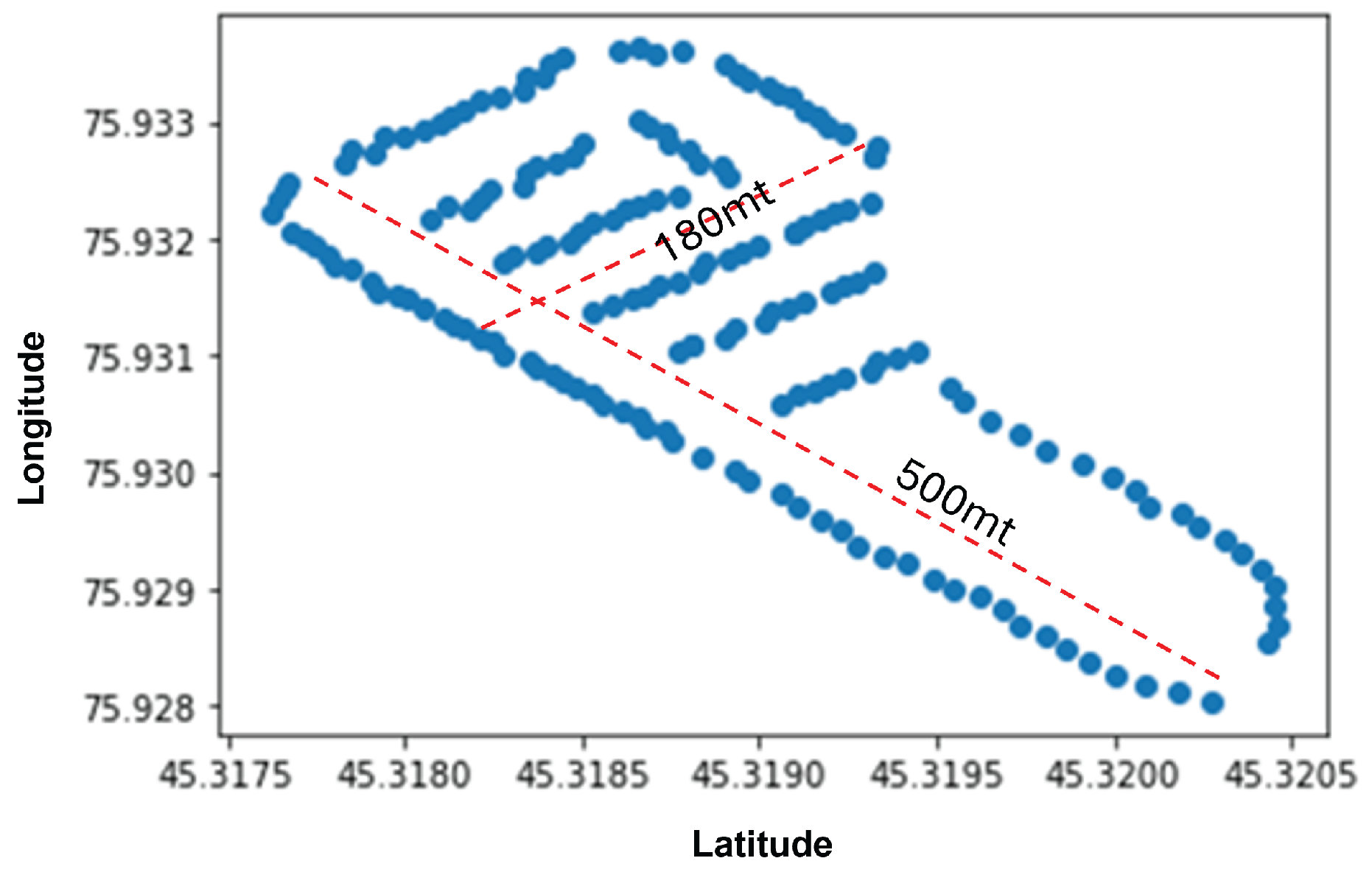
3.1. Delivery Dataset
3.2. Vehicle Specifications and Parameters
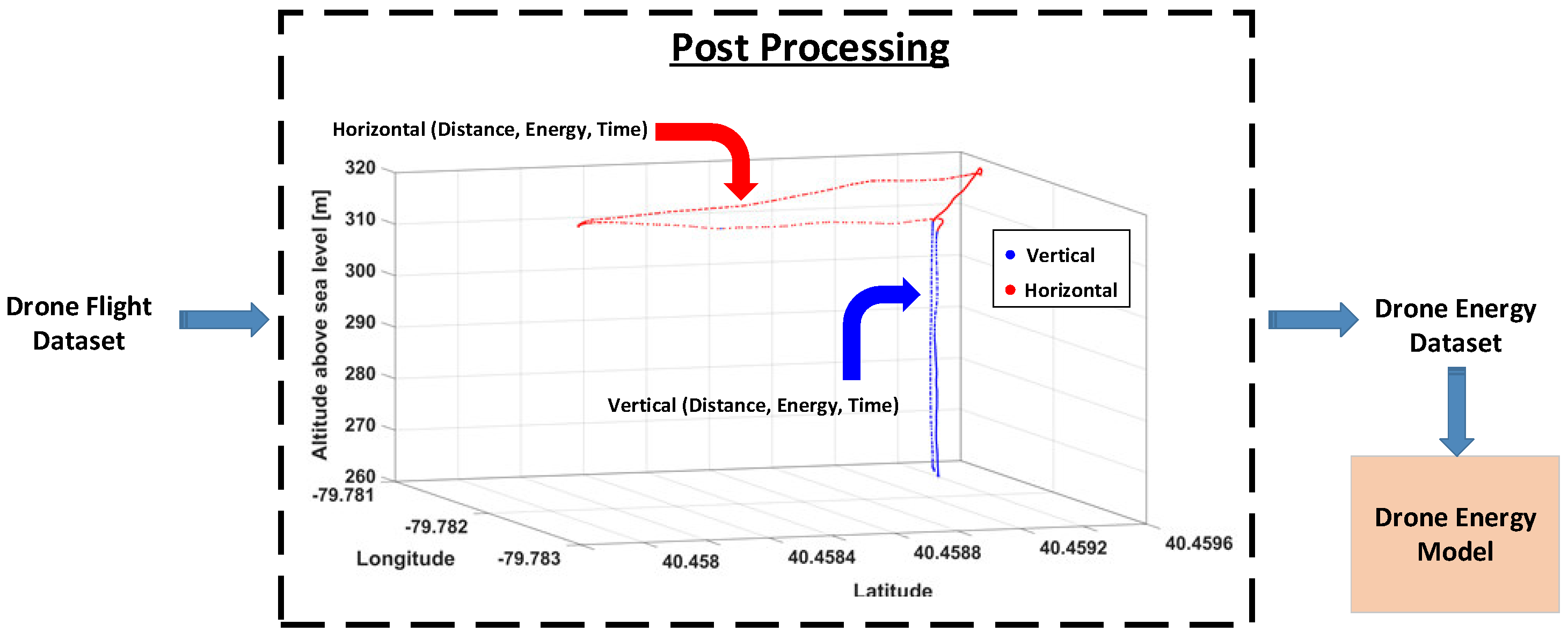
3.3. Drone Flight Dataset
3.4. Machine Learning Applications
4. Problem Setting
- The truck is loaded with the parcels and drones at the distribution center and visits the delivery area selected for this problem. The distance between the distribution center and the delivery area is not considered in the calculations.
- The truck goes to the identified stop , parks there, and launches the drone(s). Parking restrictions are not considered in this residential setting.
- The truck can launch multiple drones at each stop based on the number of delivery locations and their distances from the truck.
- There is no nearby charging facility for the drones, and the truck lacks charging capacity. Therefore, it is crucial to utilize the drone’s battery level to the maximum.
- A drone visits each customer location on its route and returns to the truck to re-supply with the next parcel. The truck stays in parking mode until all the delivery tasks assigned to the drone(s) are completed.
- The drone energy and delivery time are calculated with payload on the way to the delivery destination and without payload on the way back to the truck.
- Drones with higher battery power are scheduled first. Drone routes are planned starting from the farthest delivery location and progressing to the closer ones.
- The truck collects the drones and returns to the distribution center upon completion of the planned deliveries.
5. Drone Energy Model
6. Results
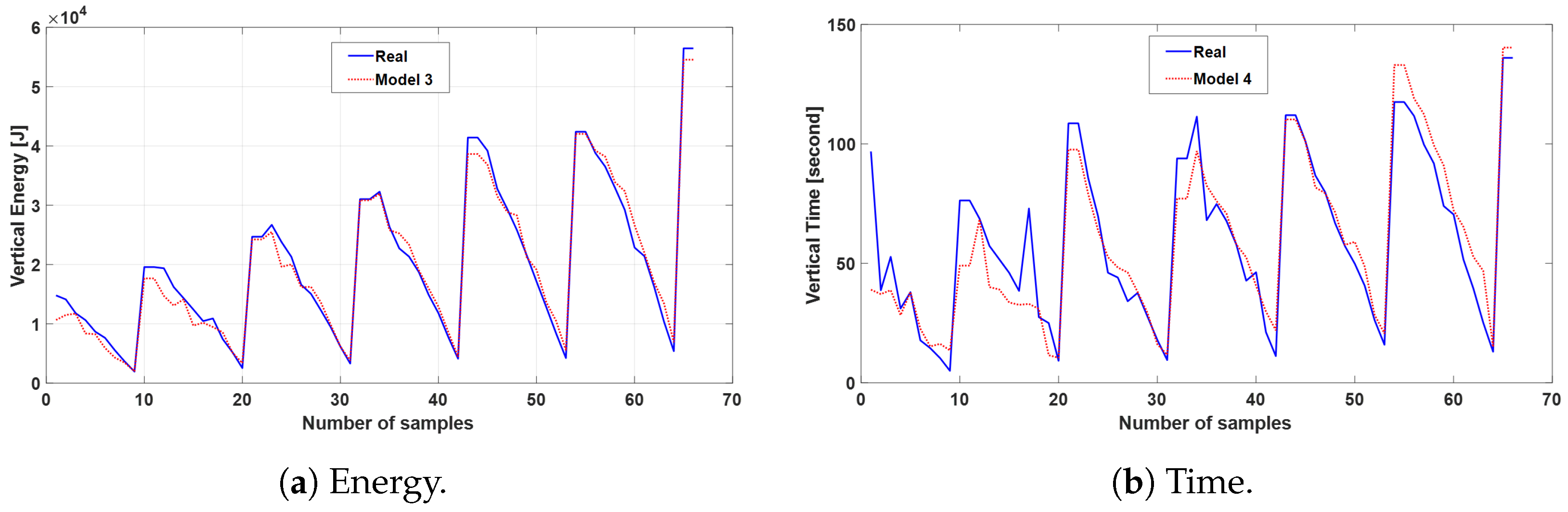
6.1. Drone Energy Model
- Regression Model 1: Optimizable GPR outperforms other models for horizontal energy (HE)
- Regression Model 2: Optimizable GPR outperforms other models for horizontal time (HT)
- Regression Model 3: Optimizable ensemble outperforms other models for vertical energy (VE)
- Regression Model 4: Optimizable GPR outperforms other models for vertical time (VT)
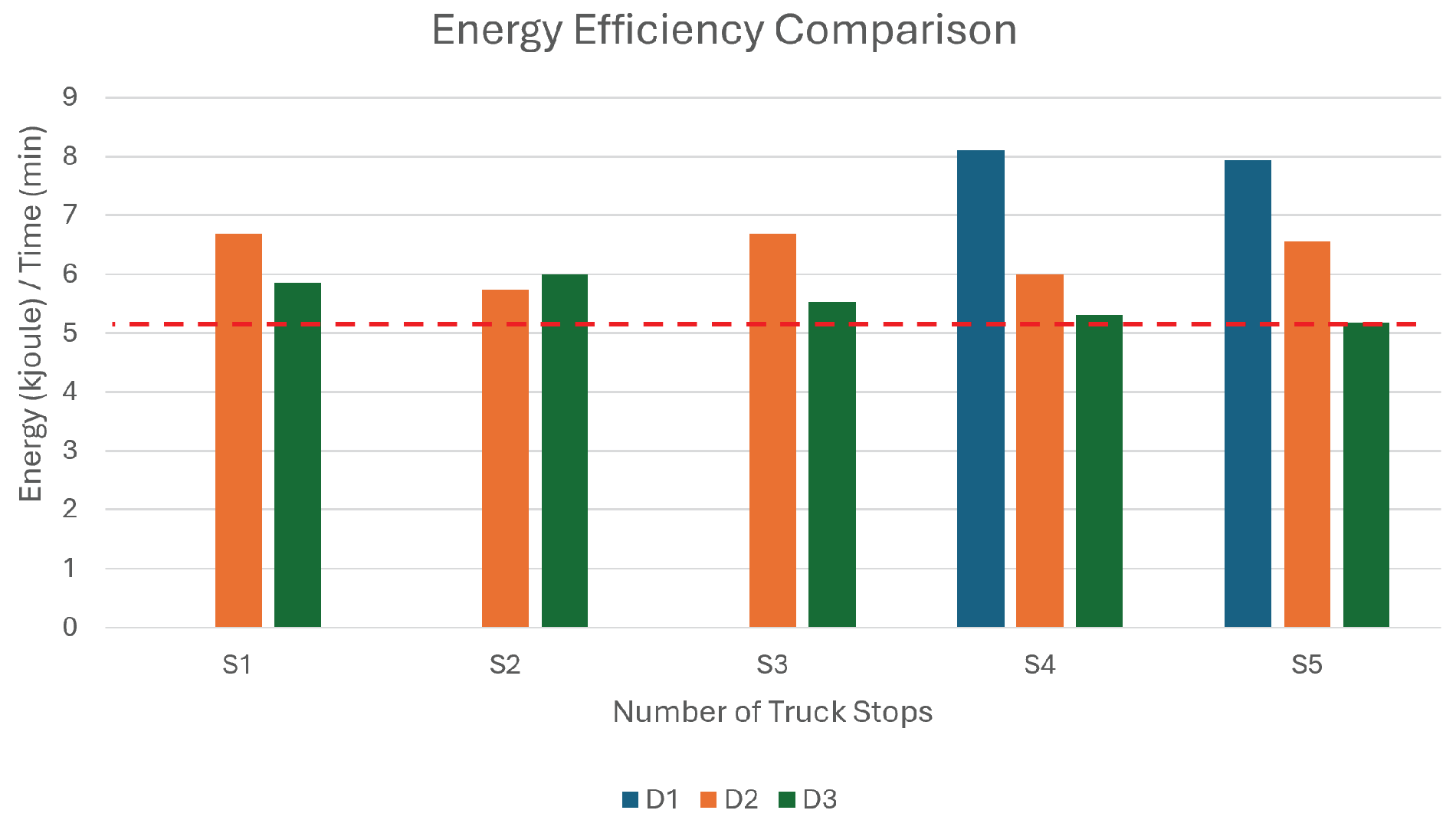
6.2. TDCD Simulation Results
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rosenberg, L.N.; Balouka, N.; Herer, Y.T.; Dani, E.; Gasparin, P.; Dobers, K.; Rüdiger, D.; Pättiniemi, P.; Portheine, P.; van Uden, S. Introducing the shared micro-depot network for last-mile logistics. Sustainability 2021, 13, 2067. [Google Scholar] [CrossRef]
- Boysen, N. Scheduling last-mile deliveries with truck-based autonomous robots. Eur. J. Oper. Res. 2018, 271, 1085–1099. [Google Scholar] [CrossRef]
- Rave, A.; Fontaine, P.; Kuhn, H. Drone location and vehicle fleet planning with trucks and aerial drones. Eur. J. Oper. Res. 2023, 308, 113–130. [Google Scholar] [CrossRef]
- Wu, G.; Fan, M.; Shi, J.; Feng, Y. Reinforcement Learning Based Truck-and-Drone Coordinated Delivery. IEEE Trans. Artif. Intell. 2023, 4, 754–763. [Google Scholar] [CrossRef]
- Bacanli, S.S.; Cimen, F.; Elgeldawi, E.; Turgut, D. Placement of Package Delivery Center for UAVs with Machine Learning. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Bi, Z.; Guo, X.; Wang, J.; Qin, S.; Liu, G. Truck-Drone Delivery Optimization Based on Multi-Agent Reinforcement Learning. Drones 2024, 8, 27. [Google Scholar] [CrossRef]
- Chen, E.; Zhou, Z.; Li, R.; Chang, Z.; Shi, J. The multi-fleet delivery problem combined with trucks, tricycles, and drones for last-mile logistics efficiency requirements under multiple budget constraints. Transp. Res. Part E Logist. Transp. Rev. 2024, 187, 103573. [Google Scholar] [CrossRef]
- Figliozzi, M.; Hadas, Y. Drone-Truck Fleet Allocation Policies for Courier Deliveries. In Decision Sciences; Juan, A.A., Faulin, J., Lopez-Lopez, D., Eds.; Springer: Cham, Switzerland, 2025; pp. 269–280. [Google Scholar]
- Thomas, T.; Srinivas, S.; Rajendran, C. Collaborative truck multi-drone delivery system considering drone scheduling and en route operations. Ann. Oper. Res. 2023, 339, 693–739. [Google Scholar] [CrossRef]
- Arishi, A.; Krishnan, K.; Arishi, M. Machine learning approach for truck-drones based last-mile delivery in the era of industry 4.0. Eng. Appl. Artif. Intell. 2022, 116, 105439. [Google Scholar] [CrossRef]
- Cicek, D.; Simsek, M.; Kantarci, B. Green and Intelligent Planning of Drone Launch in Truck-Drone Collaborative Delivery. In Proceedings of the 2024 IEEE 10th World Forum on Internet of Things (WF-IoT), Ottawa, ON, Canada, 10–13 November 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, Z.; Sengupta, R.; Kurzhanskiy, A. A power consumption model for multi-rotor small unmanned aircraft systems. In Proceedings of the 2017 international conference on unmanned aircraft systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 310–315. [Google Scholar]
- Bezzo, N.; Mohta, K.; Nowzari, C.; Lee, I.; Kumar, V.; Pappas, G. Online planning for energy-efficient and disturbance-aware uav operations. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 5027–5033. [Google Scholar]
- Troudi, A.; Addouche, S.A.; Dellagi, S.; Mhamedi, A.E. Sizing of the drone delivery fleet considering energy autonomy. Sustainability 2018, 10, 3344. [Google Scholar] [CrossRef]
- Abdilla, A.; Richards, A.; Burrow, S. Power and endurance modelling of battery-powered rotorcraft. In Proceedings of the 2015 IEEE/RSJ international Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 675–680. [Google Scholar]
- Murray, C.C.; Chu, A.G. The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery. Transp. Res. Part C Emerg. Technol. 2015, 54, 86–109. [Google Scholar] [CrossRef]
- Roberti, R.; Ruthmair, M. Exact methods for the traveling salesman problem with drone. Transp. Sci. 2021, 55/2, 315–335. [Google Scholar] [CrossRef]
- Rinaldi, M.; Primatesta, S.; Bugaj, M.; Rostáš, J.; Guglieri, G. Development of Heuristic Approaches for Last-Mile Delivery TSP with a Truck and Multiple Drones. Drones 2023, 7, 407. [Google Scholar] [CrossRef]
- Najy, W.; Archetti, C.; Diabat, A. Collaborative truck-and-drone delivery for inventory-routing problems. Transp. Res. Part C Emerg. Technol. 2023, 146, 103791. [Google Scholar] [CrossRef]
- Peng, K.; Du, J.; Lu, F.; Sun, Q.; Dong, Y.; Zhou, P.; Hu, M. A hybrid genetic algorithm on routing and scheduling for vehicle-assisted multi-drone parcel delivery. IEEE Access 2019, 7, 49191–49200. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, Z.; Shi, J.; Wu, G.; Pedrycz, W. Two-echelon routing problem for parcel delivery by cooperated truck and drone. IEEE Trans. Syst. Man, Cybern. Syst. 2020, 51, 7450–7465. [Google Scholar] [CrossRef]
- Baldisseri, A.; Siragusa, C.; Seghezzi, A.; Mangiaracina, R.; Tumino, A. Truck-based drone delivery system: An economic and environmental assessment. Transp. Res. Part D Transp. Environ. 2022, 107, 103296. [Google Scholar] [CrossRef]
- Dukkanci, O.; Campbell, J.F.; Kara, B.Y. Facility location decisions for drone delivery with riding: A literature review. Comput. Oper. Res. 2024, 167, 106672. [Google Scholar] [CrossRef]
- Zhou, L.; Silva, D.F.; Smith, A.E. Locating Drone Stations for a Truck-Drone Delivery System in Continuous Space. IEEE Trans. Evol. Comput. 2023, 29, 158–171. [Google Scholar] [CrossRef]
- Salama, M.R.; Srinivas, S. Collaborative truck multi-drone routing and scheduling problem: Package delivery with flexible launch and recovery sites. Transp. Res. Part E Logist. Transp. Rev. 2022, 164, 102788. [Google Scholar] [CrossRef]
- Mishra, D.; Tiwari, M.K. Integrated truck drone delivery services with an optimal charging stations. Expert Syst. Appl. 2024, 254, 124254. [Google Scholar] [CrossRef]
- Novotná, M.; Švadlenka, L.; Jovčić, S.; Simić, V. Micro-hub location selection for sustainable last-mile delivery. PLoS ONE 2022, 17, e0270926. [Google Scholar] [CrossRef] [PubMed]
- Leyerer, M.; Sonneberg, M.O.; Heumann, M.; Breitner, M.H. Shortening the last mile in urban areas: Optimizing a smart logistics concept for e-grocery operations. Smart Cities 2020, 3, 585–603. [Google Scholar] [CrossRef]
- Balassa, B.E.; Koteczki, R.; Lukács, B.; Buics, L. Sustainability Aspects of Drone-Assisted Last-Mile Delivery Systems—A Discrete Event Simulation Approach. Energies 2023, 16, 4656. [Google Scholar] [CrossRef]
- Rodrigues, T.A.; Patrikar, J.; Choudhry, A.; Feldgoise, J.; Arcot, V.; Gahlaut, A.; Lau, S.; Moon, B.; Wagner, B.; Matthews, H.S.; et al. In-flight positional and energy use data set of a DJI Matrice 100 quadcopter for small package delivery. Sci. Data 2021, 8, 155. [Google Scholar] [CrossRef] [PubMed]
- Kohonen, T. The self-organizing map. Proc. IEEE 1990, 78, 1464–1480. [Google Scholar] [CrossRef]
- Simsek, M.; Kantarci, B.; Boukerche, A. Utility-aware legitimacy detection of mobile crowdsensing tasks via knowledge-based self organizing feature map. IEEE Trans. Mob. Comput. 2021, 22, 3706–3723. [Google Scholar] [CrossRef]
- Simsek, M.; Kantarci, B. Artificial intelligence-empowered mobilization of assessments in COVID-19-like pandemics: A case study for early flattening of the curve. Int. J. Environ. Res. Public Health 2020, 17, 3437. [Google Scholar] [CrossRef]
- Cicek, D.; Simsek, M.; Kantarci, B. AI-Driven Attack Modeling and Defense Strategies in Mobile Crowdsensing: A Special Case Study on Fake Tasks. In Mobile Crowdsourcing: From Theory to Practice; Springer: Berlin, Germany, 2023; pp. 275–297. [Google Scholar]
- Shahbazi, M.; Simsek, M.; Kantarci, B. Density-Based Clustering and Performance Enhancement of Aeronautical Ad Hoc Networks. In Proceedings of the 2022 International Balkan Conference on Communications and Networking (BalkanCom), Sarajevo, Bosnia and Herzegovina, 22–24 August 2022; pp. 51–56. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Publication | Year | Realistic Delivery Data | Truck-Stop Setting | Machine Learning | Drone Battery Management | Fleet Sizing | Drone Sched. and Routing |
|---|---|---|---|---|---|---|---|
| Bi et al. [6] | 2024 | X | X | ✓ | X | ✓ | ✓ |
| Wu et al. [4] | 2023 | X | ✓ | ✓ | X | X | ✓ |
| Figliozzi and Hadas [8] | 2025 | X | X | X | ✓ | ✓ | X |
| Arishi et al. [10] | 2022 | X | X | ✓ | X | X | ✓ |
| Bacanli et al. [5] | 2021 | ✓ | ✓ | ✓ | X | X | X |
| Chen et al. [7] | 2024 | X | X | X | X | ✓ | ✓ |
| Thomas et al. [9] | 2023 | X | X | X | X | ✓ | ✓ |
| This Article | 2025 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Truck Model | Fiat Ducatio BEV 3.5t LH2 122LE |
|---|---|
| Av Speed (per WLTP*) | 46.6 km/h |
| Operating distance (empty) | 357 km |
| Operating distance (full) | 317 km |
| Fuel tank/battery capacity | 79 kWh |
| Energy consumption (empty) | 221.29 Wh/km |
| Energy consumption (full) | 249.21 Wh/km |
| Payload capacity | 764.1 kg |
| CO2 emission (empty) | 0.083 kgCO2/km |
| CO2 emission (full) | 0.094 kgCO2/km |
| Drone Model | DJI MATRICE 100 |
|---|---|
| Weight | 2431 g |
| Max takeoff weight | 3600 g |
| Max speed (no payload) | 17 m/s (GPS mode) |
| Drone battery model | TB48D |
| Voltage | 22.8 V |
| Capacity | 5.7 A/h |
| Energy | 467.856 kJoule |
| Notation | Description | Value |
|---|---|---|
| Distance_vertical | 15 m | |
| Distance_horizontal | SOFM output | |
| Speed_vertical | 2 m/s | |
| Speed_horizontal | 8 m/s | |
| Weight_empty | no load | |
| Weight_loaded | 250 g | |
| DE | Delivery Energy | Total energy to complete the delivery (kjoule) |
| VE | Vertical Energy | Energy for take-off and landing (kjoule) |
| HE | Horizontal Energy | Energy cruising to and from delivery location (kjoule) |
| DT | Delivery Time | Total delivery time (s) |
| HT | Horizontal Time | Time spent to and from delivery location (s) |
| VT | Vertical Time | Time spent for take-off and landing (s) |
| Optimized Hyperparameters | |||
|---|---|---|---|
| Optimizable GPR (HE) | Optimizable GPR (HT) | Optimizable GPR (VT) | Optimizable Ensemble (VE) |
| Basic Function: Constant | Basic Function: Linear | Basic Function: Linear | Ensemble Method: LSBoost |
| Kernel Function: Isotropic Squared Exponential | Kernel Function: Nonisotropic Rational Quadratic | Kernel Function: Nonisotropic Matern 5/2 | Minimum Leaf Size: 5 |
| Kernel Scale: 0.0019163 | Kernel Scale: 0.078043 | Kernel Scale: 19.2427 | Number of Learners: 63 |
| Sigma: 287.3044 | Sigma: 0.327 | Sigma: 0.00035812 | Learning Rate: 0.26978 |
| Standardized Data: Yes | Standardized Data: Yes | Standardized Data: No | Number of Predictors to Sample: 3 |
| Performance of the ML Models | ||
|---|---|---|
| Model Name | NRMSE_Train | NRMSE_Test |
| Optimizable GPR (HE) | 0.0114904 | 0.0123111 |
| Optimizable GPR (HT) | 0.0073821 | 0.0079420 |
| Optimizable GPR (VT) | 0.0001387 | 0.1012344 |
| Optimizable Ensemble (VE) | 0.0202653 | 0.0328060 |
| Model Parameters (Min–Max) | ||
|---|---|---|
| Input Variable | Training Set | Test Set |
| Payload | 0–500 gr | 0–500 gr |
| Speed | 4–12 m/s | 4–12 m/s |
| Vertical Distance | 4.63737 m–203.51263 m | 4.78525 m–202.1286 m |
| Horizontal Distance | 7.020779 m–364.1334 m | 7.12777 m–362.0462 m |
| Simulation Parameter | Value |
|---|---|
| Payload (p) | 250 g |
| Horizontal speed () | 8 m/s |
| Vertical speed () | 2 m/s |
| Vertical distance (altitude) () | 15 m |
| Number of drones () | j ∈ 0, 1, 2, 3 |
| Number of truck stops () | i ∈ {1, 2, …, 5} |
| Number of trucks () | m = 1 |
| Number of customer locations () | k ∈ {1, 2, …, 143} |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cicek, D.; Simsek, M.; Kantarci, B. Machine Learning-Driven Truck–Drone Collaborative Delivery for Time- and Energy-Efficient Last-Mile Deliveries. Electronics 2025, 14, 2026. https://doi.org/10.3390/electronics14102026
Cicek D, Simsek M, Kantarci B. Machine Learning-Driven Truck–Drone Collaborative Delivery for Time- and Energy-Efficient Last-Mile Deliveries. Electronics. 2025; 14(10):2026. https://doi.org/10.3390/electronics14102026
Chicago/Turabian StyleCicek, Didem, Murat Simsek, and Burak Kantarci. 2025. "Machine Learning-Driven Truck–Drone Collaborative Delivery for Time- and Energy-Efficient Last-Mile Deliveries" Electronics 14, no. 10: 2026. https://doi.org/10.3390/electronics14102026
APA StyleCicek, D., Simsek, M., & Kantarci, B. (2025). Machine Learning-Driven Truck–Drone Collaborative Delivery for Time- and Energy-Efficient Last-Mile Deliveries. Electronics, 14(10), 2026. https://doi.org/10.3390/electronics14102026