
Trajectory Tracking Method of Four-Wheeled Independent Drive and Steering AGV Based on LSTM-MPC and Fuzzy PID Cooperative Control


Abstract
1. Introduction
2. Theoretical Methodology
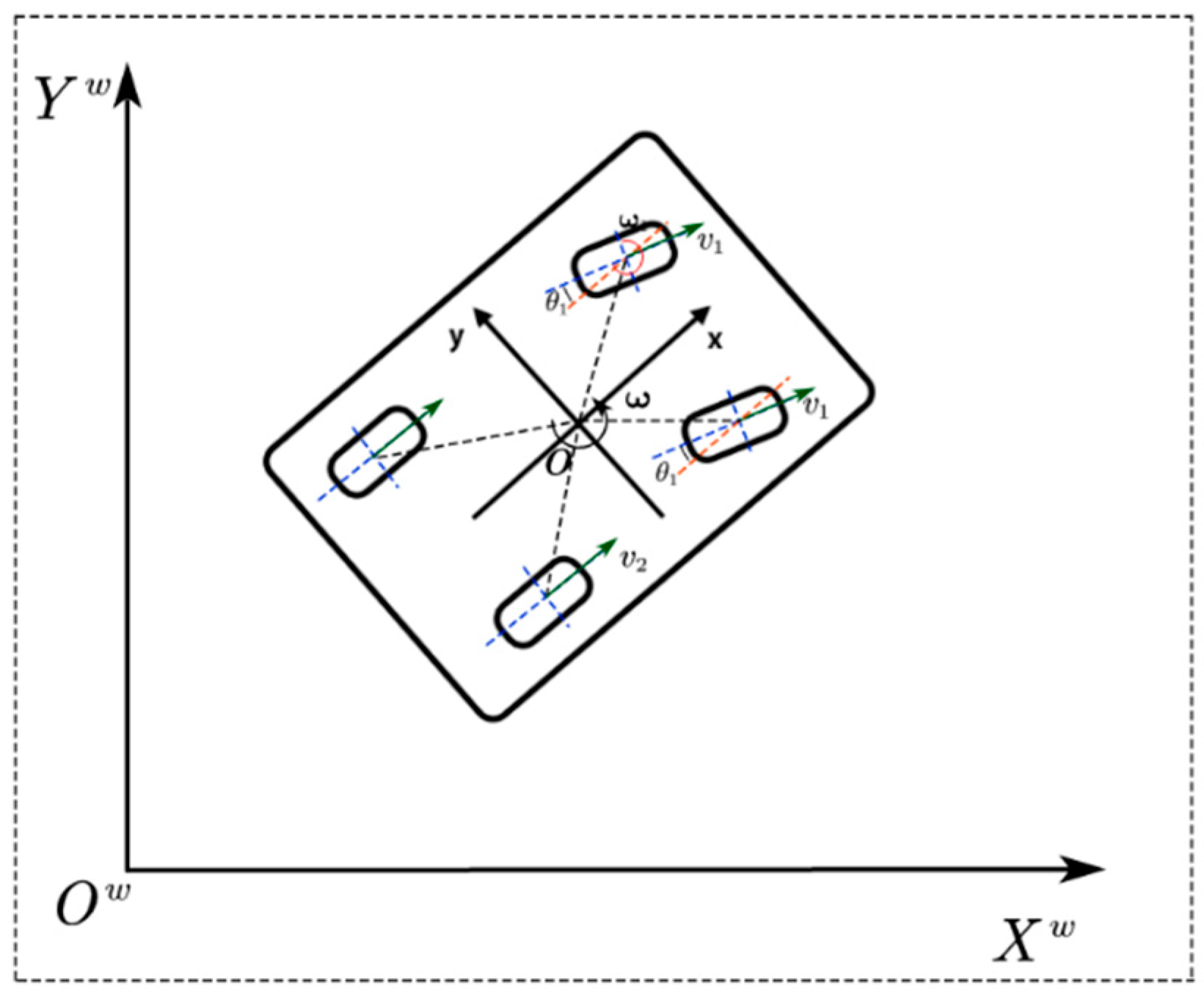
2.1. Kinematic Model
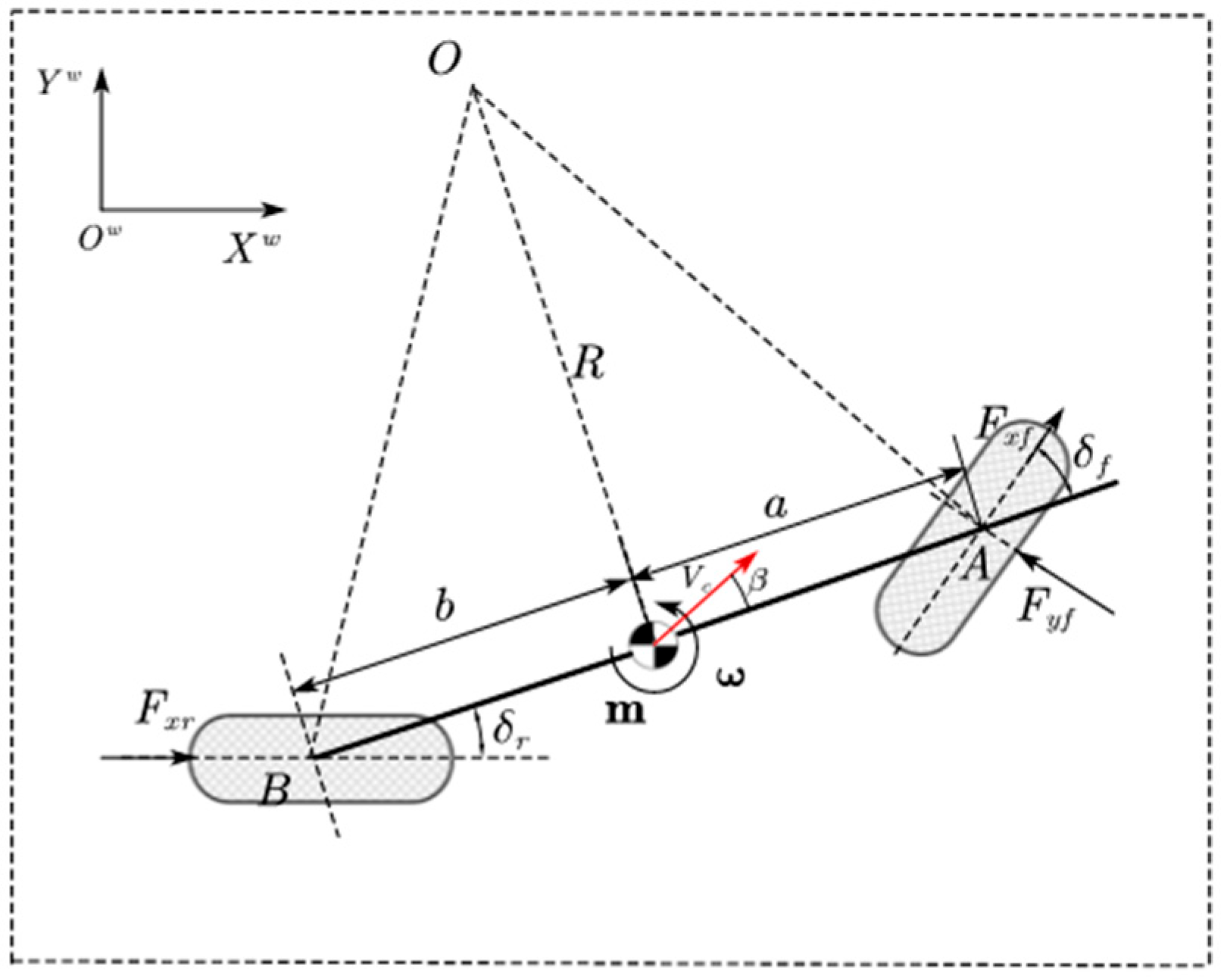
2.2. Dynamics Model
3. Control Algorithm
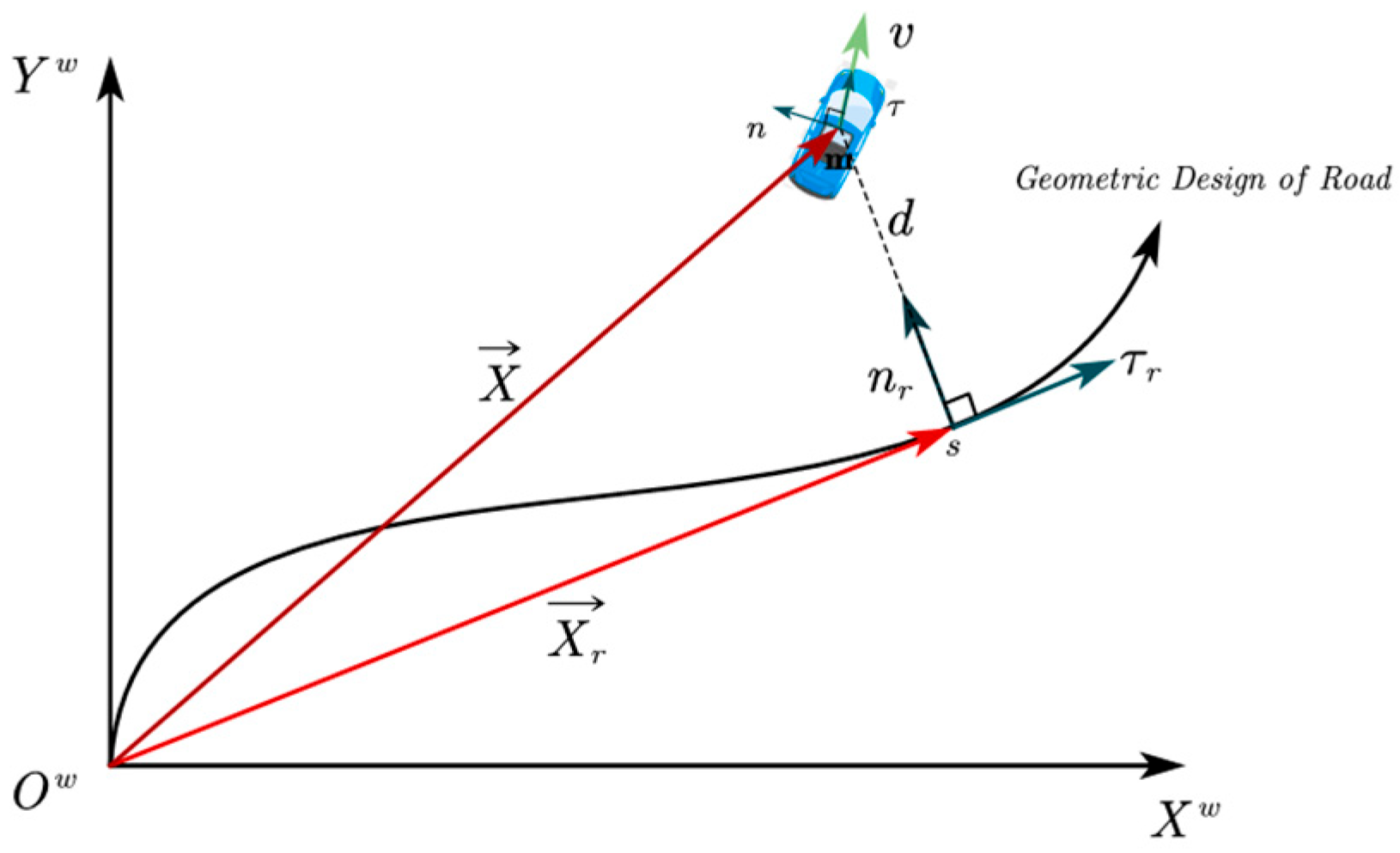
3.1. Error Control Algorithm for 4WID-4WIS
3.2. Model Predictive Control Algorithms
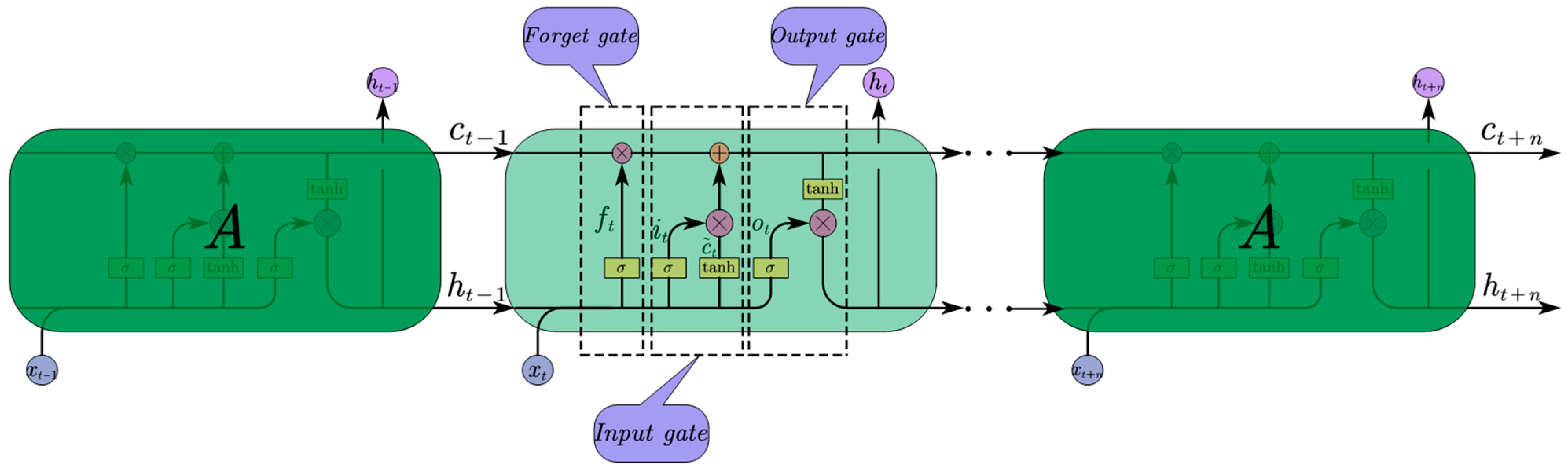
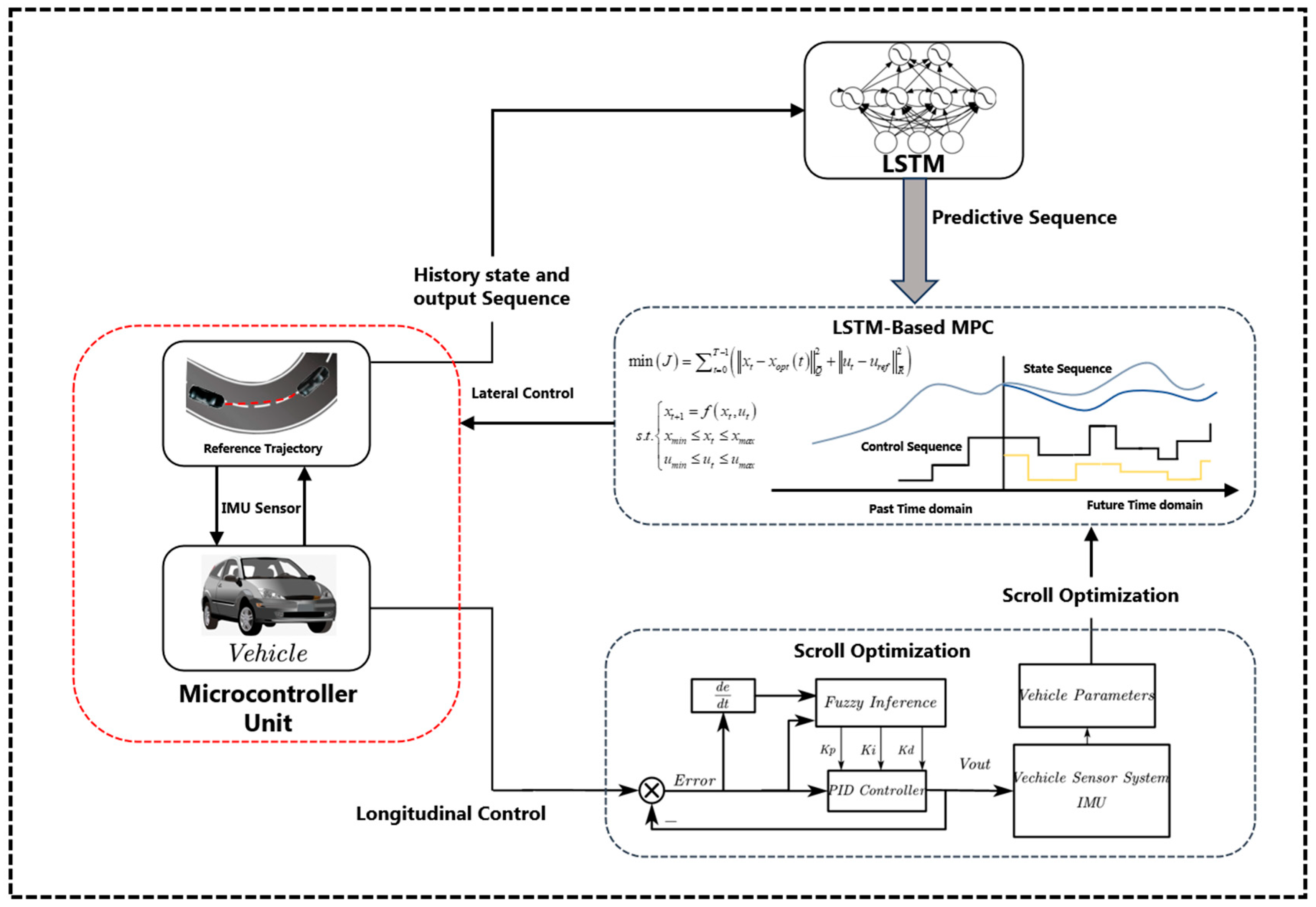
3.3. LSTM Network-Based MPC
3.4. Fuzzy PID Speed Controller
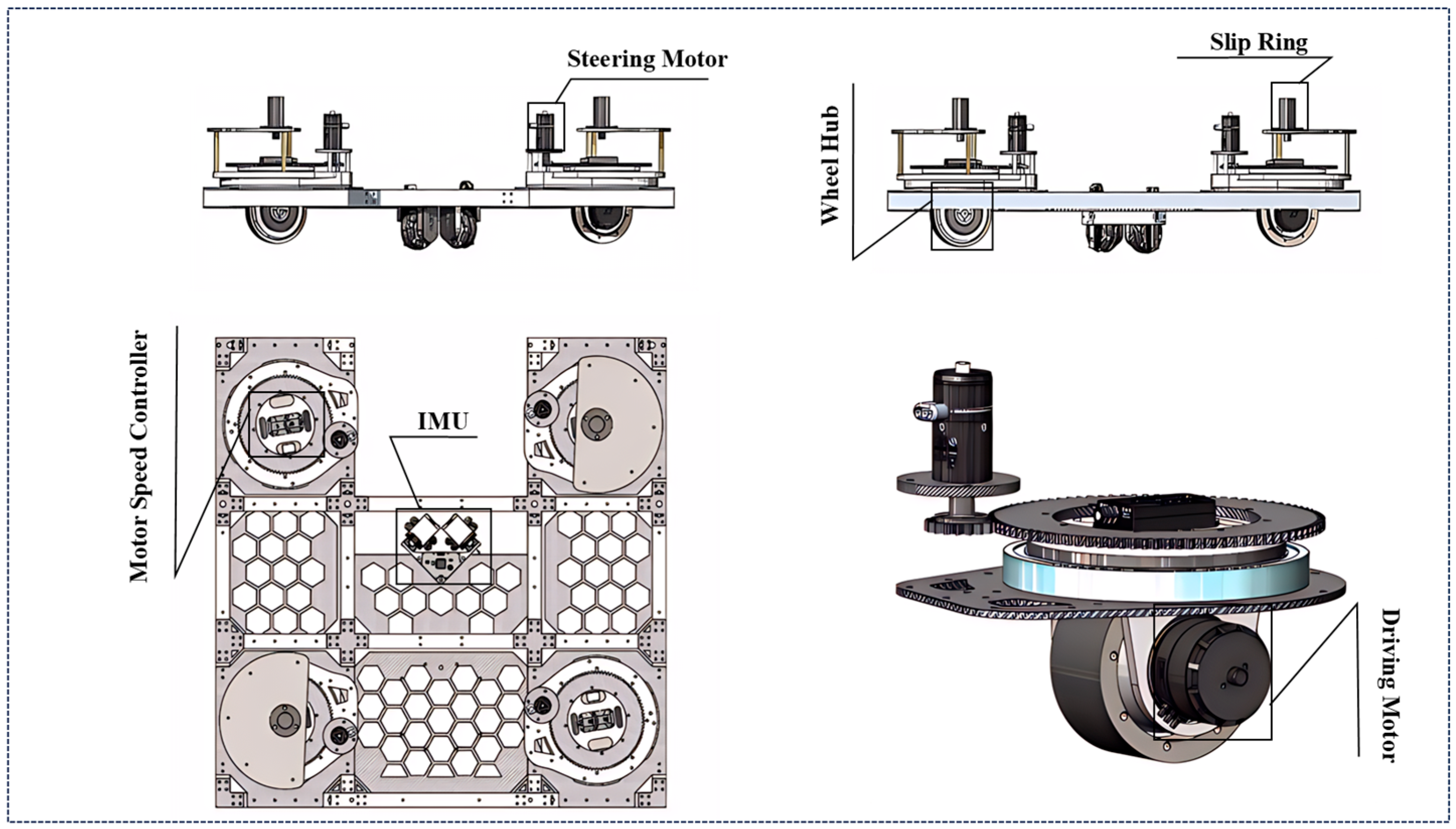
4. Experimental Setup
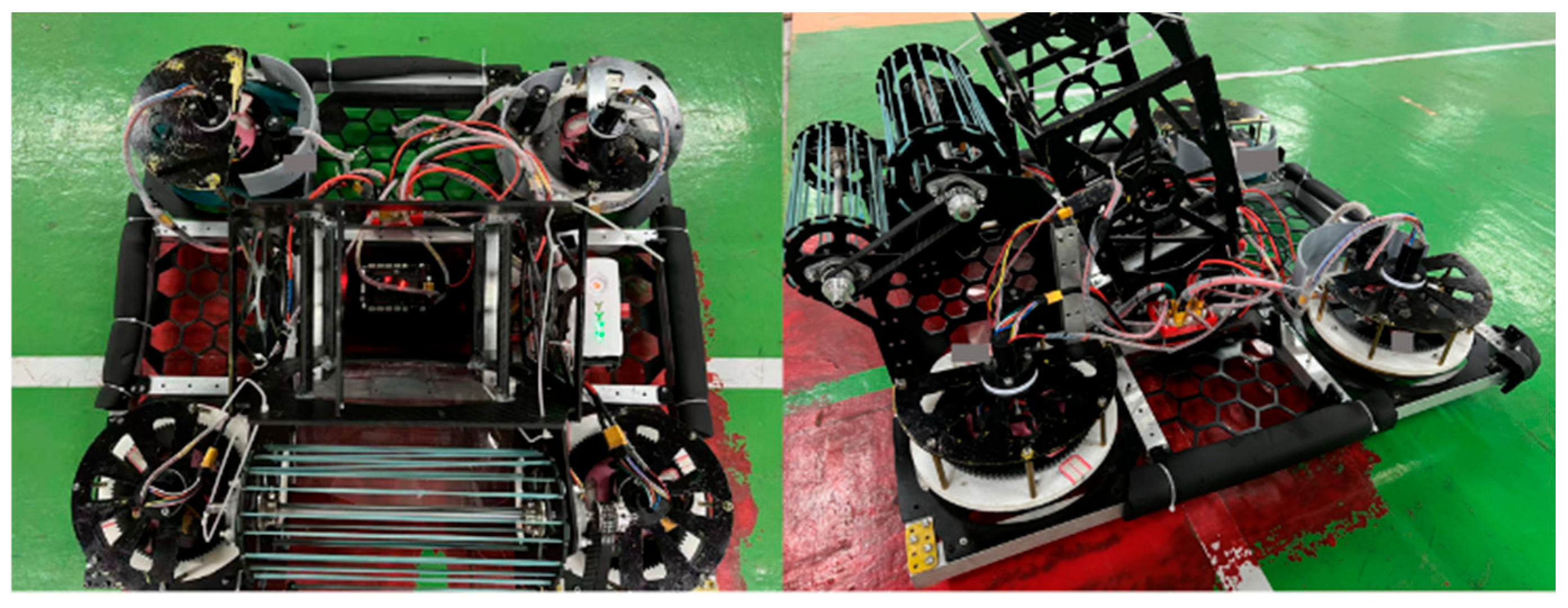
4.1. Experimental Preparation
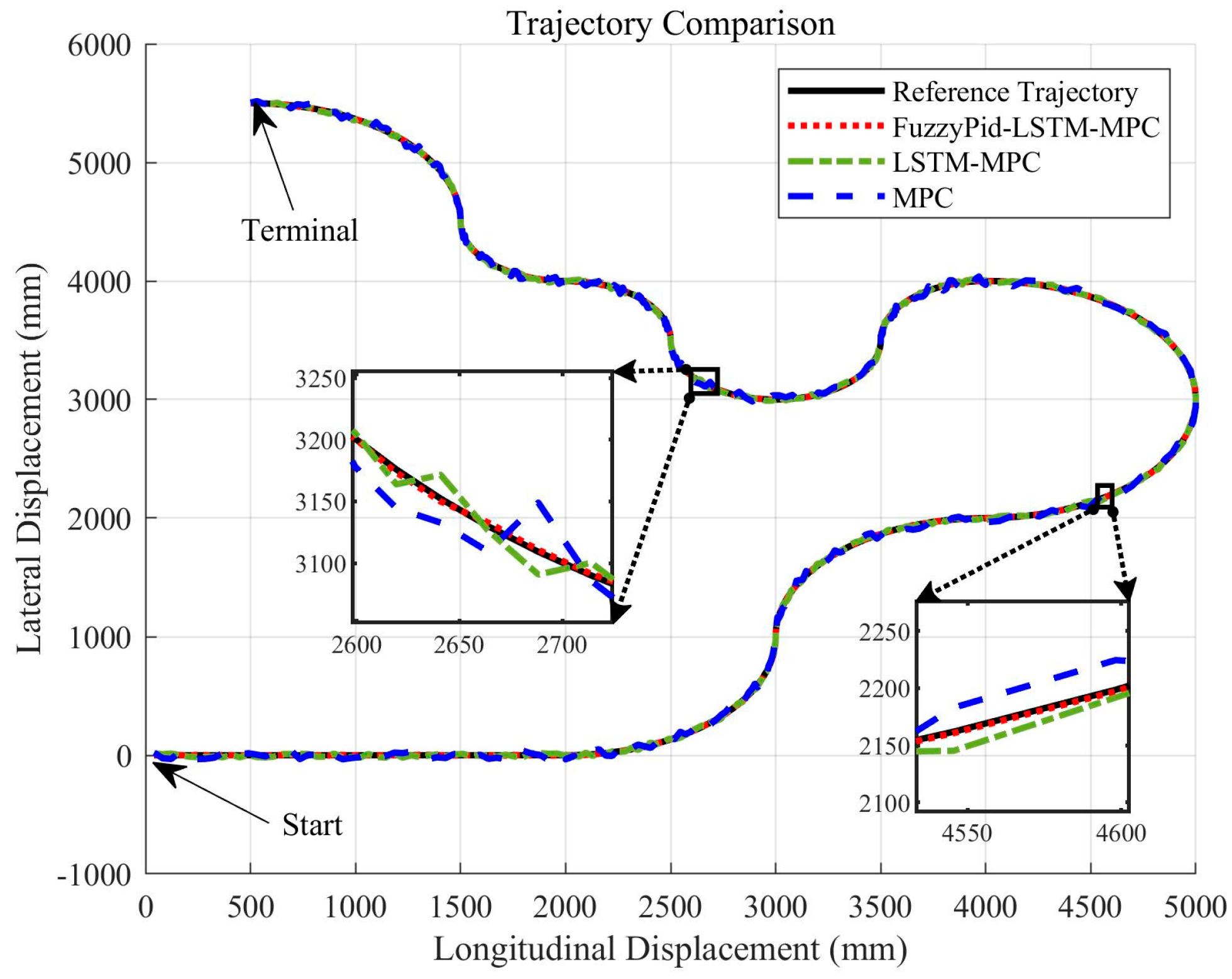
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Galati, R.; Mantriota, G.; Reina, G. Adaptive heading correction for an industrial heavy-duty omnidirectional robot. Sci. Rep. 2022, 12, 19608. [Google Scholar] [CrossRef]
- Yang, C.; Liu, J. Trajectory Tracking Control of Intelligent Driving Vehicles Based on MPC and Fuzzy PID. Math. Probl. Eng. 2023, 2023, 2464254. [Google Scholar] [CrossRef]
- Huang, K.; Wei, K.; Li, F.; Yang, C.; Gui, W. LSTM-MPC: A Deep Learning Based Predictive Control Method for Multimode Process Control. IEEE Trans. Ind. Electron. 2022, 70, 11544–11554. [Google Scholar] [CrossRef]
- Ibari, B.; Benchikh, L.; Elhachimi, A.R.H.; Ahmed-Foitih, Z. Backstepping Approach for Autonomous Mobile Robot Trajectory Tracking. Indones. J. Electr. Eng. Comput. Sci. 2016, 2, 478–485. [Google Scholar] [CrossRef]
- Xu, C.; Zhou, X.; Chen, R.; Li, B.; He, W.; Li, Y.; Ye, F. Trajectory Tracking for 3-Wheeled Independent Drive and Steering Mobile Robot Based on Dynamic Model Predictive Control. Appl. Sci. 2025, 15, 485. [Google Scholar] [CrossRef]
- Sun, X.; Deng, S.; Tong, B.; Wang, S.; Zhang, C. A Solution for Trajectory Planning and Control of Cooperative Steering Mobile Robot Based on Time Elastic Band. J. Comput. Syst. Sci. Int. 2022, 61, 1046–1057. [Google Scholar] [CrossRef]
- Liniger, A.; Domahidi, A.; Morari, M. Optimization-based autonomous racing of 1:43 scale RC cars. Optim. Control Appl. Methods 2014, 36, 628–647. [Google Scholar] [CrossRef]
- Rokonuzzaman, M.; Mohajer, N.; Nahavandi, S.; Mohamed, S. Review and performance evaluation of path tracking controllers of autonomous vehicles. IET Intell. Transp. Syst. 2021, 15, 646–670. [Google Scholar] [CrossRef]
- Bhatt, N.P.; Khajepour, A.; Hashemi, E. MPC-PF: Socially and Spatially Aware Object Trajectory Prediction for Autonomous Driving Systems Using Potential Fields. IEEE Trans. Intell. Transp. Syst. 2023, 24, 5351–5361. [Google Scholar] [CrossRef]
- Ling, K.; Wu, B.; Maciejowski, J. Embedded Model Predictive Control (MPC) using a FPGA. IFAC Proc. Vol. 2008, 41, 15250–15255. [Google Scholar] [CrossRef]
- Selvamurugan, A.; Ganesan, P.K.; Nayak, S.S.; Simiyon, A.; Indiran, T. CNN-LSTM-Based Nonlinear Model Predictive Controller for Temperature Trajectory Tracking in a Batch Reactor. ACS Omega 2024, 9, 47203–47212. [Google Scholar] [CrossRef] [PubMed]
- Takahama, T.; Akasaka, D. Model Predictive Control Approach to Design Practical Adaptive Cruise Control for Traffic Jam. Int. J. Automot. Eng. 2018, 9, 99–104. [Google Scholar] [CrossRef]
- He, S.; Dai, S.-L.; Zhao, Z.; Zou, T.; Ma, Y. UDE-Based Distributed Formation Control for MSVs With Collision Avoidance and Connectivity Preservation. IEEE Trans. Ind. Inform. 2024, 20, 1476–1487. [Google Scholar] [CrossRef]
- Salzmann, T.; Kaufmann, E.; Arrizabalaga, J.; Pavone, M.; Scaramuzza, D.; Ryll, M. Real-Time Neural MPC: Deep Learning Model Predictive Control for Quadrotors and Agile Robotic Platforms. IEEE Robot. Autom. Lett. 2023, 8, 2397–2404. [Google Scholar] [CrossRef]
- Fischer, J.; Steiner, M.; Taş, Ö.Ş.; Stiller, C. Safety Reinforced Model Predictive Control (SRMPC): Improving MPC with Reinforcement Learning for Motion Planning in Autonomous Driving. In Proceedings of the 2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC), Bilbao, Spain, 24–28 September 2023; pp. 2811–2818. [Google Scholar] [CrossRef]
- Hu, B.; Wan, Y.; Lei, Y. Collision avoidance of USV by model predictive control-aided deep reinforcement learning. In Proceedings of the 2022 IEEE International Conference on Industrial Technology (ICIT), Shanghai, China, 22–25 August 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Lu, L.; Zhao, H.; Liu, X.; Sun, C.; Zhang, X.; Yang, H. MPC-ECMS Energy Management of Extended-Range Vehicles Based on LSTM Multi-Signal Speed Prediction. Electronics 2023, 12, 2642. [Google Scholar] [CrossRef]
- Sun, Y.; Du, M.; Qi, X. Enhanced Modeling and Control of Organic Rankine Cycle Systems via AM-LSTM Networks Based Nonlinear MPC. Energy Sci. Eng. 2024, 13, 94–106. [Google Scholar] [CrossRef]
- Wang, H.; Lu, B.; Li, J.; Liu, T.; Xing, Y.; Lv, C.; Cao, D.; Li, J.; Zhang, J.; Hashemi, E. Risk Assessment and Mitigation in Local Path Planning for Autonomous Vehicles With LSTM Based Predictive Model. IEEE Trans. Autom. Sci. Eng. 2022, 19, 2738–2749. [Google Scholar] [CrossRef]
- Xin, J.; Xu, T.; Zhu, J.; Wang, H.; Peng, J. Long Short-Term Memory-Based Multi-Robot Trajectory Planning: Learn from MPCC and Make It Better. Adv. Intell. Syst. 2024, 6, 2300703. [Google Scholar] [CrossRef]
- Saidi, S.M.; Mellah, R.; Fekik, A.; Azar, A.T. Real-Time Fuzzy-PID for Mobile Robot Control and Vision-Based Obstacle Avoidance. Int. J. Serv. Sci. Manag. Eng. Technol. 2022, 13, 1–32. [Google Scholar] [CrossRef]
- Sun, J.; Sun, Z.; Wei, P.; Liu, B.; Wang, Y.; Zhang, T.; Yan, C. Path Planning Algorithm for a Wheel-Legged Robot Based on the Theta* and Timed Elastic Band Algorithms. Symmetry 2023, 15, 1091. [Google Scholar] [CrossRef]
- Fan, H.; Zhu, F.; Liu, C.; Zhang, L.; Zhuang, L.; Li, D.; Zhu, W.; Hu, J.; Li, H.; Kong, Q. Baidu Apollo EM motion planner. arXiv 2018, arXiv:1807.08048. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Symbol |
|---|---|
| Center of mass point | m |
| Center of mass velocity | |
| Pendulum angle | |
| The angle of lateral deflection of center of mass | β |
| Heading angle | + β |
| Front-wheel angle | |
| Rear-wheel angle |
| e | ||||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | ||
| ec | NB | PB | PM | PS | PS | PM | PM | PS |
| NM | PM | PS | ZO | ZO | PS | PS | PS | |
| NS | PS | ZO | NS | NS | ZO | ZO | ZO | |
| ZO | ZO | NS | NM | NB | NM | NS | ZO | |
| PS | ZO | ZO | ZO | NS | NS | PS | PM | |
| PM | PS | PS | PS | ZO | ZO | PS | PM | |
| PB | PS | PM | PM | PS | PS | PM | PB | |
| Method | Lateral Error (mm) | Yaw Error (deg) | ||
|---|---|---|---|---|
| Max | RMSE | Max | RMSE | |
| NaiveMPC | 1.50 | 1.20 × 100 | 1.50 × 10−14 | 5.10 × 10−15 |
| LSTM-MPC | 0.75 | 7.17 × 10−1 | 1.73 × 10−14 | 4.21 × 10−15 |
| FuzzyPID-LSTMMPC | 0.69 | 2.46 × 10−2 | 1.00 × 10−14 | 2.93 × 10−15 |
| Epoch | RMSE | Loss | Complexity Layers | Platform |
|---|---|---|---|---|
| 1 | 0.44 | 9.9 × 10−2 | Sequence Input (2) LSTM Layer (64) Fully Connected Layer (2) Regression Layer (2) | Intel i7 |
| 50 | 0.03 | 4.1 × 10−4 | ||
| 100 | 0.03 | 4.0 × 10−4 | ||
| 150 | 0.03 | 4.0 × 10−4 | ||
| 200 | 0.03 | 3.9 × 10−4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wan, Z.; Xu, C.; Li, B.; Li, Y.; Ye, F. Trajectory Tracking Method of Four-Wheeled Independent Drive and Steering AGV Based on LSTM-MPC and Fuzzy PID Cooperative Control. Electronics 2025, 14, 2000. https://doi.org/10.3390/electronics14102000
Wan Z, Xu C, Li B, Li Y, Ye F. Trajectory Tracking Method of Four-Wheeled Independent Drive and Steering AGV Based on LSTM-MPC and Fuzzy PID Cooperative Control. Electronics. 2025; 14(10):2000. https://doi.org/10.3390/electronics14102000
Chicago/Turabian StyleWan, Ziheng, Chaobin Xu, Bazhou Li, Yang Li, and Fangping Ye. 2025. "Trajectory Tracking Method of Four-Wheeled Independent Drive and Steering AGV Based on LSTM-MPC and Fuzzy PID Cooperative Control" Electronics 14, no. 10: 2000. https://doi.org/10.3390/electronics14102000
APA StyleWan, Z., Xu, C., Li, B., Li, Y., & Ye, F. (2025). Trajectory Tracking Method of Four-Wheeled Independent Drive and Steering AGV Based on LSTM-MPC and Fuzzy PID Cooperative Control. Electronics, 14(10), 2000. https://doi.org/10.3390/electronics14102000