
Wind Turbine Operation Status Monitoring and Fault Prediction Methods Based on Sensing Data and Big Bang–Big Crunch Algorithm

Abstract
1. Introduction
2. Modeling and Solving
2.1. Data Preprocessing
- (1)
- Eliminate zeros and duplicates in the database;
- (2)
- Fill in the missing values using the values from the previous timestamp;
- (3)
- Remove all data with power less than 1200 kW at wind speeds greater than 13 m/s.
2.1.1. Standardization
2.1.2. Correlation Coefficient Matrix and Factor Loading Matrix
2.1.3. Factor Rotation
2.1.4. Calculating Factor Scores and Reducing the Dimensionality
2.2. Improved LSSVM Model
2.2.1. Application of the Lagrange Multiplier Method
2.2.2. Equation Transformation
2.2.3. LSSVM Regression Function
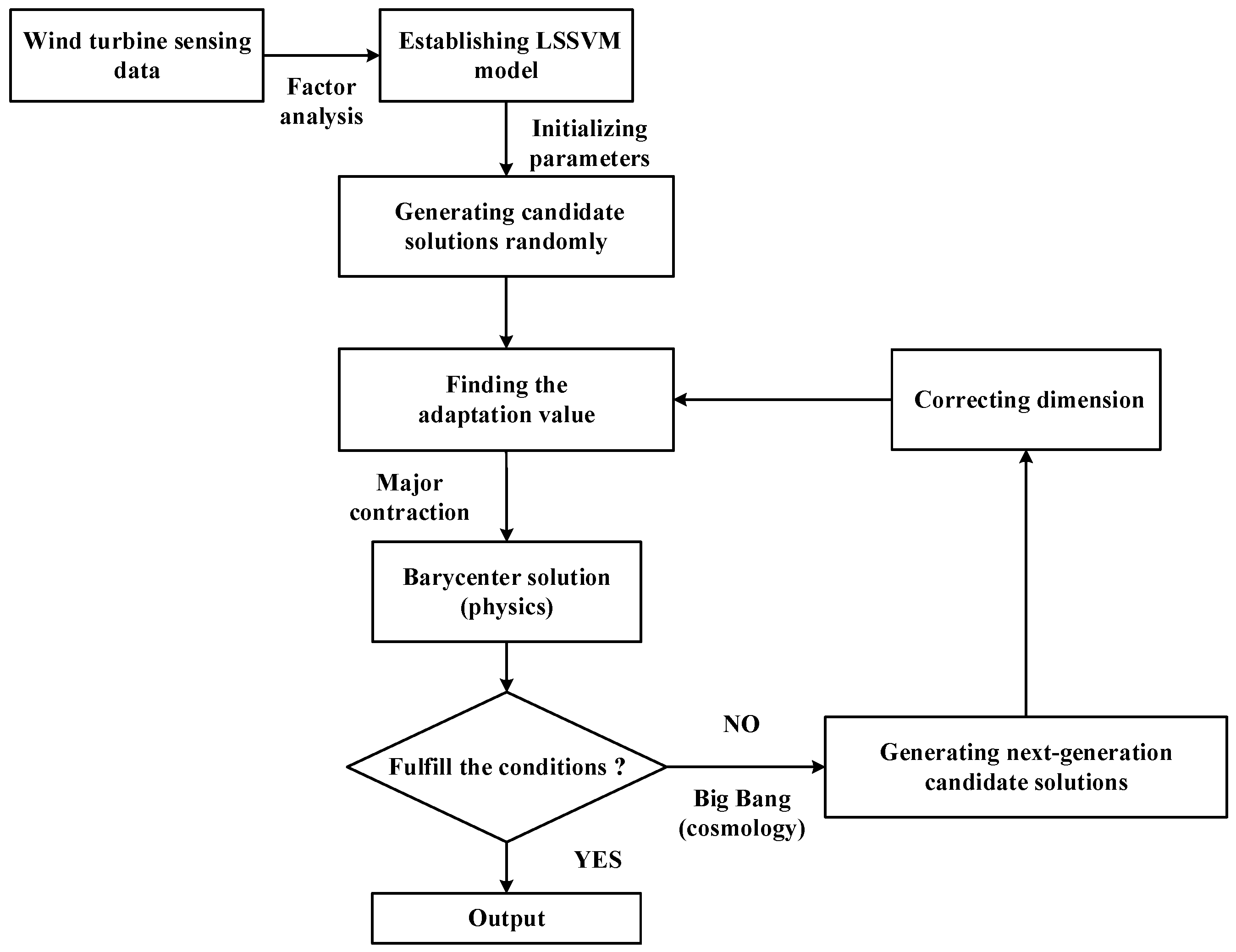
3. Parameter Optimization for LSSVM Model Based on the Big Bang–Big Crunch Algorithm
3.1. Model Parameter Optimization
3.1.1. Contraction Process
3.1.2. Big Bang Process
3.2. Decision-Making
- (1)
- The obtained prediction results are sent to the expert system information base to be saved and then sent to the reasoning machine;
- (2)
- The reasoning machine performs deductive analysis on the prediction results and repeatedly matches the established rules in the information base to derive the reason for the wind turbine failure;
- (3)
- The reason for the wind turbine failure is fed into the explanation mechanism. The corresponding explanation is drawn and presented on the human–computer interaction interface, according to the deductive analysis process and obtained results.
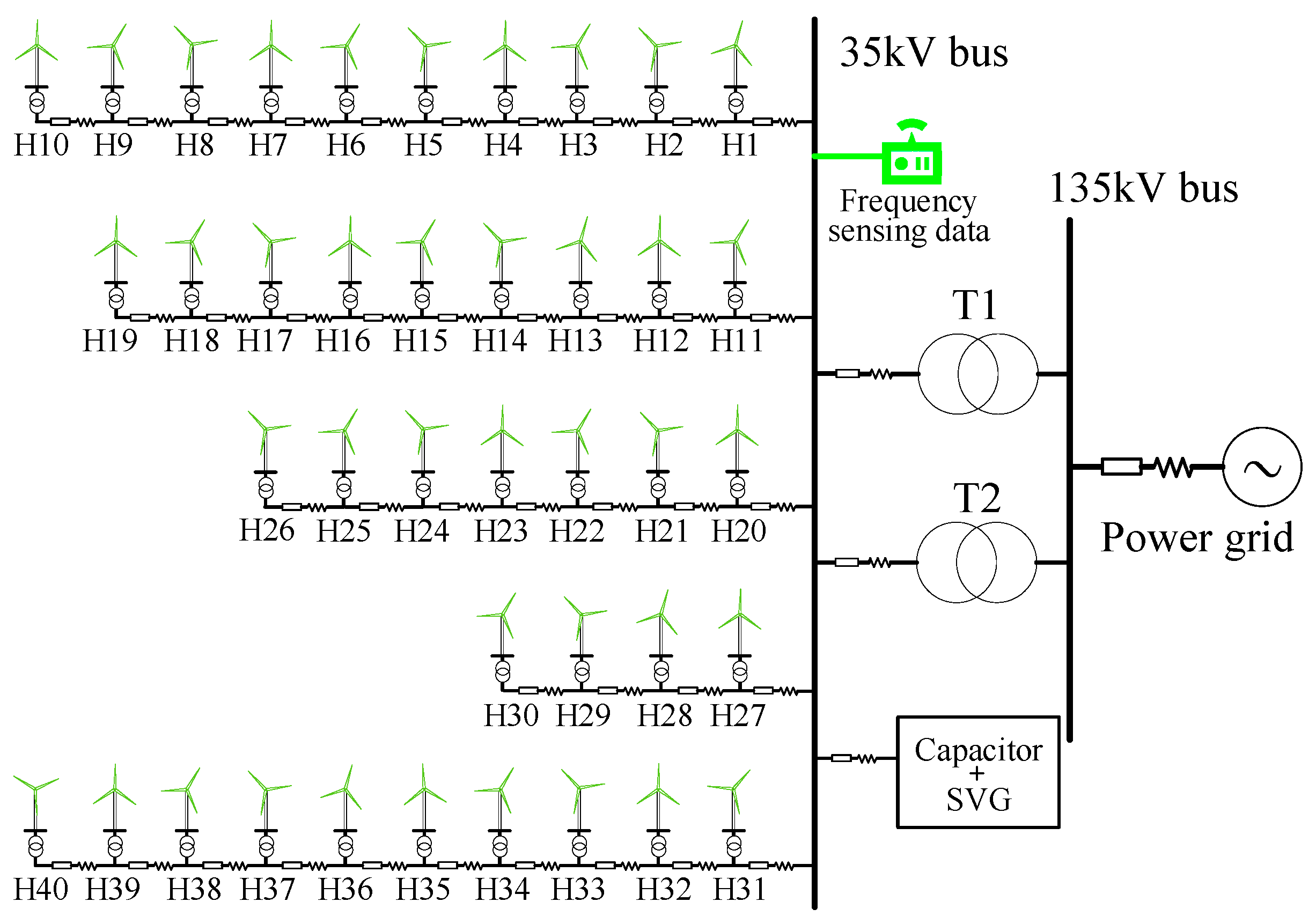
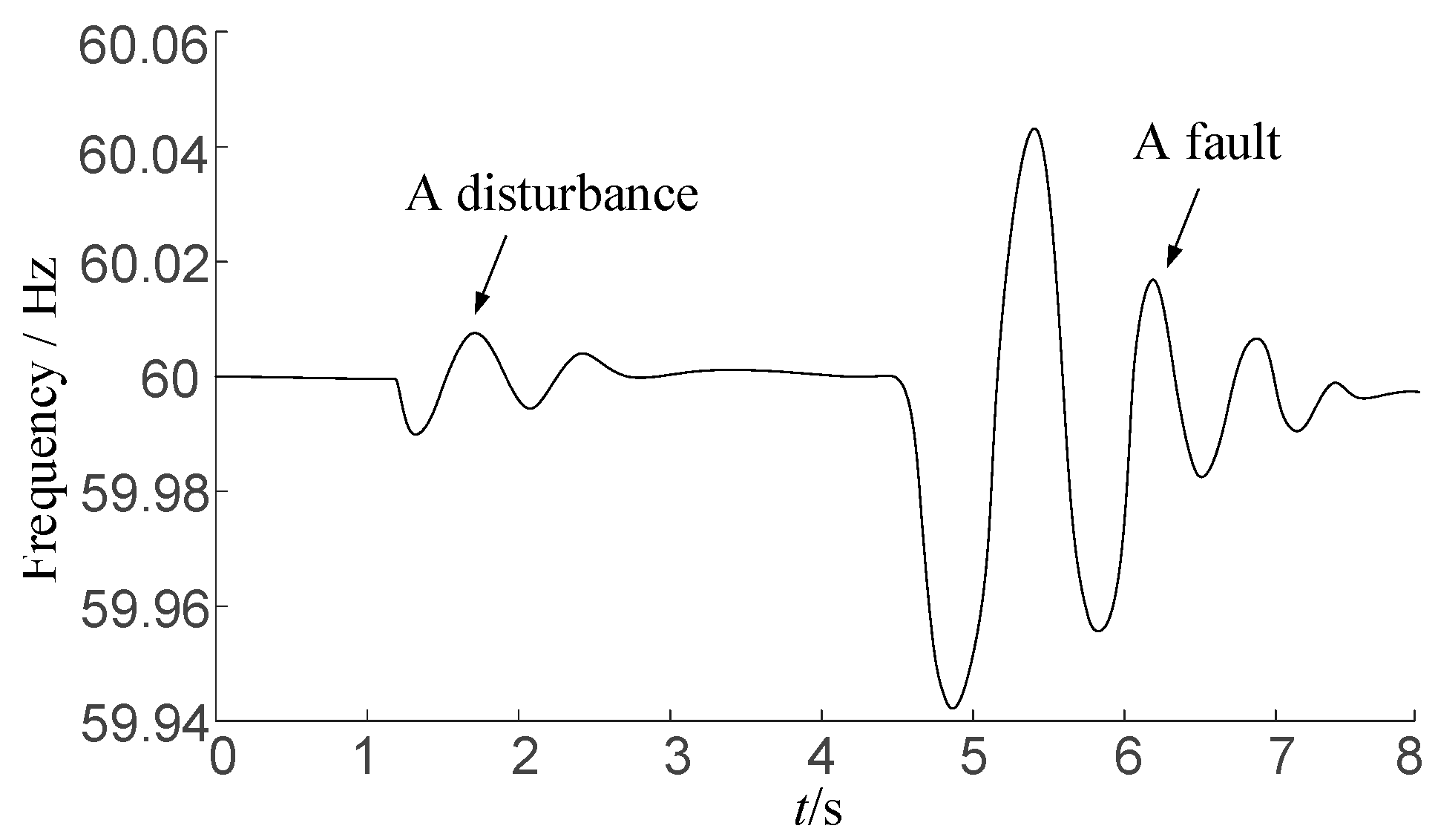
4. Case Study
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cao, X.; Liu, C.; Wu, M.; Li, Z.; Wang, Y.; Wen, Z. Heterogeneity and connection in the spatial-temporal-evolution trend of China’s energy consumption at provincial level. Appl. Energy 2023, 336, 120842. [Google Scholar] [CrossRef]
- Tapiero, C.S. Energy consumption and environmental pollution: A stochastic model. IMA J. Manag. Math. 2009, 20, 263–273. [Google Scholar] [CrossRef]
- Zhang, Z.; Lin, Y.; Fan, J.; Han, Z.; Fan, Y.; Shu, Y. Implicit-integral dynamic optimization based on spatial partitioning and temporal segmentation for the power jumps of renewable energy sources. Appl. Energy 2025, 377 Pt A, 124471. [Google Scholar] [CrossRef]
- Zhang, Z.; Han, Z.; Hu, H.; Fan, Y.; Fan, J.; Shu, Y. Self-adaptive system state optimization based on nonlinear affine transformation for renewable energy volatility. Renew. Energy 2024, 230, 120846. [Google Scholar] [CrossRef]
- Junjun, L.; Zhengqiu, W.; Xunqiong, T.; Bo, C. Review of wind power generation and relative technology development. Electr. Power Constr. 2011, 32, 64–72. [Google Scholar]
- Zhang, B.; Yang, Y. Status and trend of wind & photovoltaic power development. Electr. Power 2006, 39, 65–69. [Google Scholar]
- Walford, C. Wind Turbine Reliability: Understanding and Minimizing Wind Turbine Operation and Maintenance Costs; Rep. SAND-2006-1100; Sandia National Laboratories: Albuquerque, NM, USA, 2006. [Google Scholar]
- Kusiak, A.; Verma, A. A Data-Mining Approach to Monitoring Wind Turbines. IEEE Trans. Sustain. Energy 2012, 3, 150–157. [Google Scholar] [CrossRef]
- Arredondorodriguez, F.; Ledesma, P.; Castronuovo, E.D.; Aghahassani, M. Stability Improvement of a Transmission Grid With High Share of Renewable Energy Using TSCOPF and Inertia Emulation. IEEE Trans. Power Syst. 2020, 37, 3230–3237. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, Z.; Shang, B.; Fan, Y.; Shu, Y. Event-triggered reactive power tracking optimization for second-level power fluctuations of renewables and stochastic loads. Int. J. Electr. Power Energy Syst. 2024, 155, 109581. [Google Scholar] [CrossRef]
- Zhang, Z.; Shang, L.; Liu, C.; Lai, Q.; Jiang, Y. Consensus-based distributed optimal power flow using gradient tracking technique for short-term power fluctuations. Energy 2023, 264, 125635. [Google Scholar] [CrossRef]
- Ulbig, A.; Borsche, T.S.; Andersson, G. Impact of Low Rotational Inertia on Power System Stability and Operation. IFAC Proc. Vol. 2014, 47, 7290–7297. [Google Scholar] [CrossRef]
- Faulstich, S.; Hahn, B.; Tavner, P.J. Wind turbine downtime and its importance for offshore deployment. Wind Energy 2011, 14, 327–337. [Google Scholar] [CrossRef]
- Qiao, W.; Lu, D. A survey on wind turbine condition monitoring and fault diagnosis-Part I: Components and subsystems. IEEE Trans. Ind. Electron. 2015, 62, 6536–6545. [Google Scholar] [CrossRef]
- Amirat, Y.; Benbouzid, M.E.H.; Al-Ahmar, E.; Bensaker, B.; Turri, S. A brief status on condition monitoring and fault diagnosis in wind energy conversion systems. Renew. Sustain. Energy Rev. 2009, 13, 2629–2636. [Google Scholar] [CrossRef]
- Hu, X.; Tang, T.; Tan, L.; Zhang, H. Fault Detection for Point Machines: A Review, Challenges, and Perspectives. Actuators 2023, 12, 391. [Google Scholar] [CrossRef]
- Jing, X.; Wu, Z.; Zhang, L.; Li, Z.; Mu, D. Electrical Fault Diagnosis From Text Data: A Supervised Sentence Embedding Combined With Imbalanced Classification. IEEE Trans. Ind. Electron. 2024, 71, 3064–3073. [Google Scholar] [CrossRef]
- Zhu, D.; Wang, Z.; Hu, J.; Zou, X.; Kang, Y.; Guerrero, J.M. Rethinking Fault Ride-Through Control of DFIG-Based Wind Turbines from New Perspective of Rotor-Port Impedance Characteristics. IEEE Trans. Sustain. Energy 2024, 15, 2050–2062. [Google Scholar] [CrossRef]
- Zhu, W. Research on Methods of Fault Diagnosis, Prognostics and Condition Assessment for Hydroelectric Generator Units; Huazhong University of Science & Technology: Wuhan, China, 2017. [Google Scholar]
- Badihi, H.; Zhang, Y.; Jiang, B.; Pillay, P.; Rakheja, S. A Comprehensive Review on Signal-Based and Model-Based Condition Monitoring of Wind Turbines: Fault Diagnosis and Lifetime Prognosis. Proc. IEEE 2022, 110, 754–806. [Google Scholar] [CrossRef]
- Zheng, G.T.; Wang, W.J. A new cepstral analysis procedure of recovering excitations for transient components of vibration signals and applications to rotating machinery condition monitoring. J. Vib. Acoust. 2001, 123, 222–229. [Google Scholar] [CrossRef]
- Cedric, P.; Patrick, G.; Jan, H. Vibration-based bearing fault detection for operations and maintenance cost reduction in wind energy. Renew. Energy 2018, 116, 74–87. [Google Scholar]
- Dang, J.; Wei, J.; Li, J. Feature Extraction Method for Unbalanced Fault Electrical Signal of Wind Turbine Impeller Based on Hilbert and CA -VMD. Power Syst. Clean Energy 2021, 37, 112–118+126. [Google Scholar]
- Huo, J.; Tang, G.; Liu, D. A novel monitoring method of wind turbine generator real-time reliability based on temperature signals. Renew. Energy Resour. 2016, 34, 408–412. [Google Scholar]
- Fu, W.; Zhou, J.; Li, C.; Xiao, H.; Xiao, J.; Zhu, W. Vibrant Fault Diagnosis for Hydro-Electric Generating Unit Based on Support Vector Data Description Improved With Fuzzy K Nearest Neighbor. Proc. CSEE 2014, 34, 5788–5795. [Google Scholar]
- Zhang, X.; Zhou, J.; Wang, C.; Li, C. Vibrant fault diagnosis for hydroelectric generator unit considering overlapping fault patterns. Power Syst. Prot. Control 2012, 40, 8–14. [Google Scholar]
- Zhang, X.; Zhang, X.; Liu, J. Fuzzy kernel-clustering algorithm based on differential evolution algorithm and its application in fault diagnosis. Power Syst. Prot. Control 2014, 42, 102–106. [Google Scholar]
- Verma, A.; Kusiak, A. Fault Monitoring of Wind Turbine Generator Brushes: A Data-Mining Approach. J. Sol. Energy Eng. 2012, 134, 021001. [Google Scholar] [CrossRef]
- Kaytez, F.; Taplamacioglu, M.C.; First, H. Forecasting electricity consumption: A comparison of regression analysis, neural networks and least squares support vector machines. Electr. Power Energy Syst. 2015, 67, 431–438. [Google Scholar] [CrossRef]
- Jindal, A.; Dua, A.; Kaur, K.; Singh, M.; Kumar, N.; Mishra, S. Decision Tree and SVM-Based Data Analytics for Theft Detection in Smart Grid. IEEE Trans. Ind. Inform. 2016, 12, 1005–1016. [Google Scholar] [CrossRef]
- Wu, W.; Tian, L.; Lin, Z. Hybrid Big Bang Crunch Algorithm Based on Particle Swarm Optimization. J. Guangdong Univ. Technol. 2016, 33, 12–17. [Google Scholar]
- Karadayi, B.; Kuvvetli, Y.; Ural, S. Fault-related Alarm Detection of a Wind Turbine SCADA System. In Proceedings of the 2021 3rd International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), Ankara, Turkey, 11–13 June 2021; pp. 1–5. [Google Scholar]
- Liu, P.; Li, Z.; Zhuo, Y.; Lin, X.; Ding, S.; Khalid, M.S.; Adio, O.S. Design of Wind Turbine Dynamic Trip-Off Risk Alarming Mechanism for Large-Scale Wind Farms. IEEE Trans. Sustain. Energy 2017, 8, 1668–1678. [Google Scholar] [CrossRef]
- Liu, Y.; Wu, Z.; Wang, X. Research on Fault Diagnosis of Wind Turbine Based on SCADA Data. IEEE Access 2020, 8, 185557–185569. [Google Scholar] [CrossRef]
- Du, B.; Narusue, Y.; Furusawa, Y.; Nishihara, N.; Indo, K.; Morikawa, H.; Iida, M. Clustering Wind Turbines for SCADA Data-Based Fault Detection. IEEE Trans. Sustain. Energy 2023, 14, 442–452. [Google Scholar] [CrossRef]
- Jeong, D.; Park, C.; Ko, Y.M. Missing data imputation using mixture factor analysis for building electric load data. Appl. Energy 2021, 304, 117655. [Google Scholar] [CrossRef]
- Li, W.; Ji, Z.; Dong, F. Global renewable energy power generation efficiency evaluation and influencing factors analysis. Sustain. Prod. Consum. 2022, 33, 438–453. [Google Scholar] [CrossRef]
- Sovacool, B.K. A qualitative factor analysis of renewable energy and Sustainable Energy for All (SE4ALL) in the Asia-Pacific. Energy Policy 2013, 59, 393–403. [Google Scholar] [CrossRef]
- Wang, G.-J.; Xie, C.; Chen, S.; Yang, J.-J.; Yang, M.-Y. Random matrix theory analysis of cross-correlations in the US stock market: Evidence from Pearson’s correlation coefficient and detrended cross-correlation coefficient. Phys. A Stat. Mech. Its Appl. 2013, 392, 3715–3730. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, P.; Zhang, C.; Lei, S. Wind energy prediction with LS-SVM based on Lorenz perturbation. J. Eng. 2017, 2017, 1724–1727. [Google Scholar] [CrossRef]
- Liu, L.; Liu, Z.; Qian, X. Rolling bearing fault diagnosis based on generalized multiscale mean permutation entropy and GWO-LSSVM. IET Sci. Meas. Technol. 2023, 17, 243–256. [Google Scholar] [CrossRef]
- Chen, W.; Li, J.; Wang, Q.; Han, K. Fault feature extraction and diagnosis of rolling bearings based on wavelet thresholding denoising with CEEMDAN energy entropy and PSO-LSSVM. Measurement 2021, 172, 108901. [Google Scholar] [CrossRef]
- Santos, A., Jr.; da Costa, G.R.M. Optimal-power-flow solution by Newton’s method applied to an augmented Lagrangian function. IEE Proc.-Gener. Transm. Distrib. 1995, 142, 33–36. [Google Scholar] [CrossRef]
- Bakirtzis, A.; Zoumas, C. Lambda of Lagrangian relaxation solution to unit commitment problem. IEEE Proc.—Gener. Transm. Distrib. 2000, 147, 131–137. [Google Scholar] [CrossRef]
- Agarwal, D.; Singh, P.; El Sayed, M.A. The Karush–Kuhn–Tucker (KKT) optimality conditions for fuzzy-valued fractional optimization problems. Math. Comput. Simul. 2023, 205, 861–877. [Google Scholar] [CrossRef]
- Singh, D.; Dar, B.; Kim, D. KKT optimality conditions in interval valued multiobjective programming with generalized differentiable functions. Eur. J. Oper. Res. 2016, 254, 29–39. [Google Scholar] [CrossRef]
- Azizian, D.; Gharehpetian, G.B. Split-winding transformer design using new hybrid optimisation algorithm based on PSO and I-BB-BC. IET Sci. Meas. Technol. 2018, 12, 712–718. [Google Scholar] [CrossRef]
- Mbuli, N.; Ngaha, W. A survey of big bang big crunch optimisation in power systems. Renew. Sustain. Energy Rev. 2022, 155, 111848. [Google Scholar] [CrossRef]
- Prayogo, D.; Cheng, M.-Y.; Wu, Y.-W.; Herdany, A.A.; Prayogo, H. Differential Big Bang—Big Crunch algorithm for construction-engineering design optimization. Autom. Constr. 2018, 85, 290–304. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
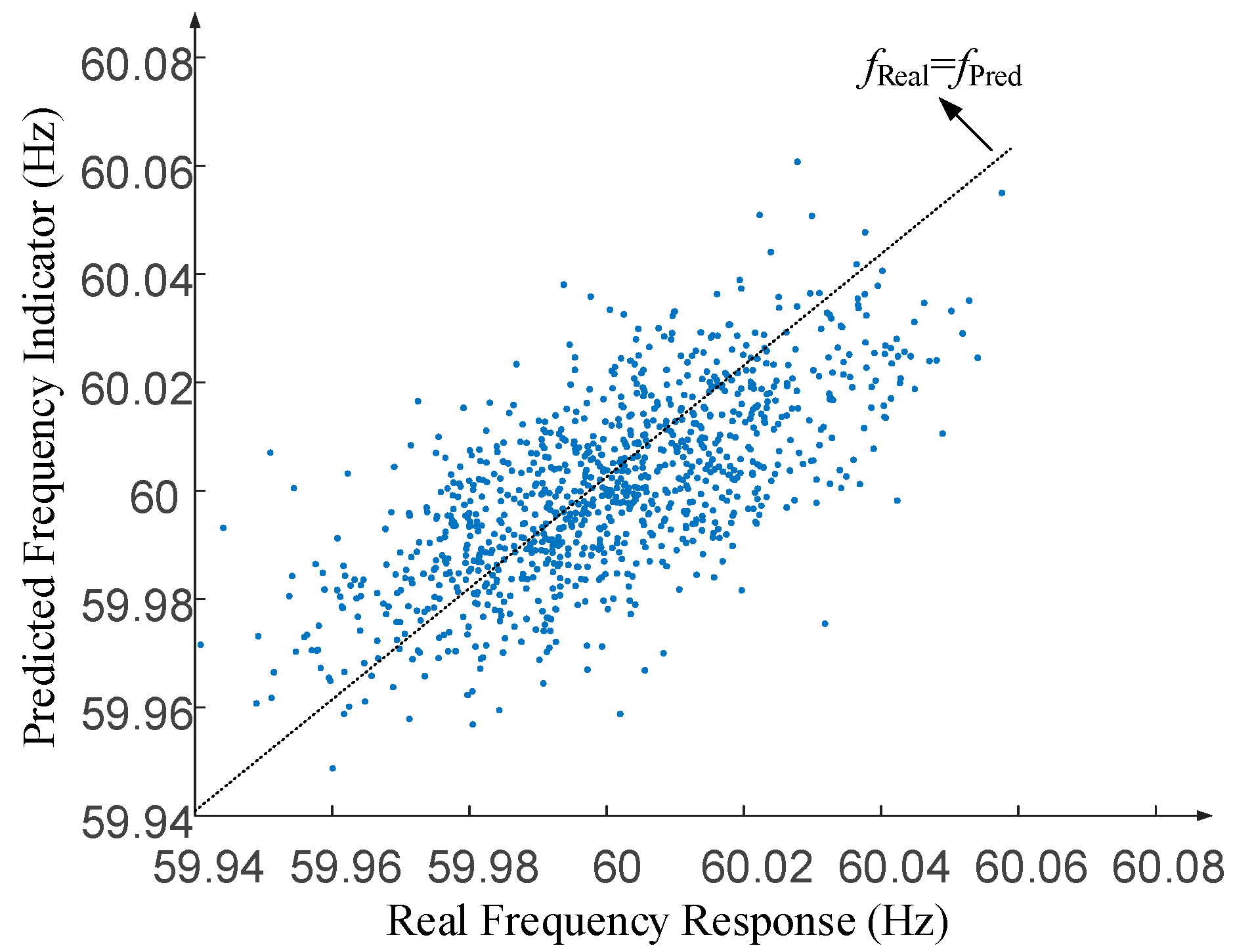
| Different Methods | Conventional Method | Proposed Method |
|---|---|---|
| Algorithm | SVM | Improved LSSVM with parameters optimized by Big Bang–Big Crunch algorithm |
| Measured Data | Frequency | |
| MAE (Hz) | 1.187 × 10−2 | 1.65 × 10−3 |
| MSE (Hz2) | 2.24 × 10−4 | 4.30 × 10−6 |
| RMSE (Hz) | 1.497 × 10−2 | 2.07 × 10−3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, P.; Tian, B.; Liu, Z.; Lin, Y.; Wang, Z.; Yin, X.; Zhang, J.; Luo, B.; Zhang, Z. Wind Turbine Operation Status Monitoring and Fault Prediction Methods Based on Sensing Data and Big Bang–Big Crunch Algorithm. Electronics 2024, 13, 4404. https://doi.org/10.3390/electronics13224404
Li P, Tian B, Liu Z, Lin Y, Wang Z, Yin X, Zhang J, Luo B, Zhang Z. Wind Turbine Operation Status Monitoring and Fault Prediction Methods Based on Sensing Data and Big Bang–Big Crunch Algorithm. Electronics. 2024; 13(22):4404. https://doi.org/10.3390/electronics13224404
Chicago/Turabian StyleLi, Peng, Bing Tian, Zhong Liu, Yuehuan Lin, Zhiming Wang, Xu Yin, Jiaming Zhang, Baifeng Luo, and Zhaoyi Zhang. 2024. "Wind Turbine Operation Status Monitoring and Fault Prediction Methods Based on Sensing Data and Big Bang–Big Crunch Algorithm" Electronics 13, no. 22: 4404. https://doi.org/10.3390/electronics13224404
APA StyleLi, P., Tian, B., Liu, Z., Lin, Y., Wang, Z., Yin, X., Zhang, J., Luo, B., & Zhang, Z. (2024). Wind Turbine Operation Status Monitoring and Fault Prediction Methods Based on Sensing Data and Big Bang–Big Crunch Algorithm. Electronics, 13(22), 4404. https://doi.org/10.3390/electronics13224404