
An Adaptive Learning Control for MIMO Nonlinear System with Nonuniform Trial Lengths and Invertible Control Gain Matrix


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- Compared to the parameterized dynamical systems, a more general class of MIMO nonlinear systems with nonuniform trial lengths and iteration-varying external disturbance is used for AILC designs.
- In contrast to previous AILC studies with nonuniform trial lengths, the control gain matrix in this paper is considered indeterminate and assumed to be invertible. As a result, the conventional requirement for the control gain matrix of the system to be positive-definite (or negative-definite) or even known is relaxed in our approach.
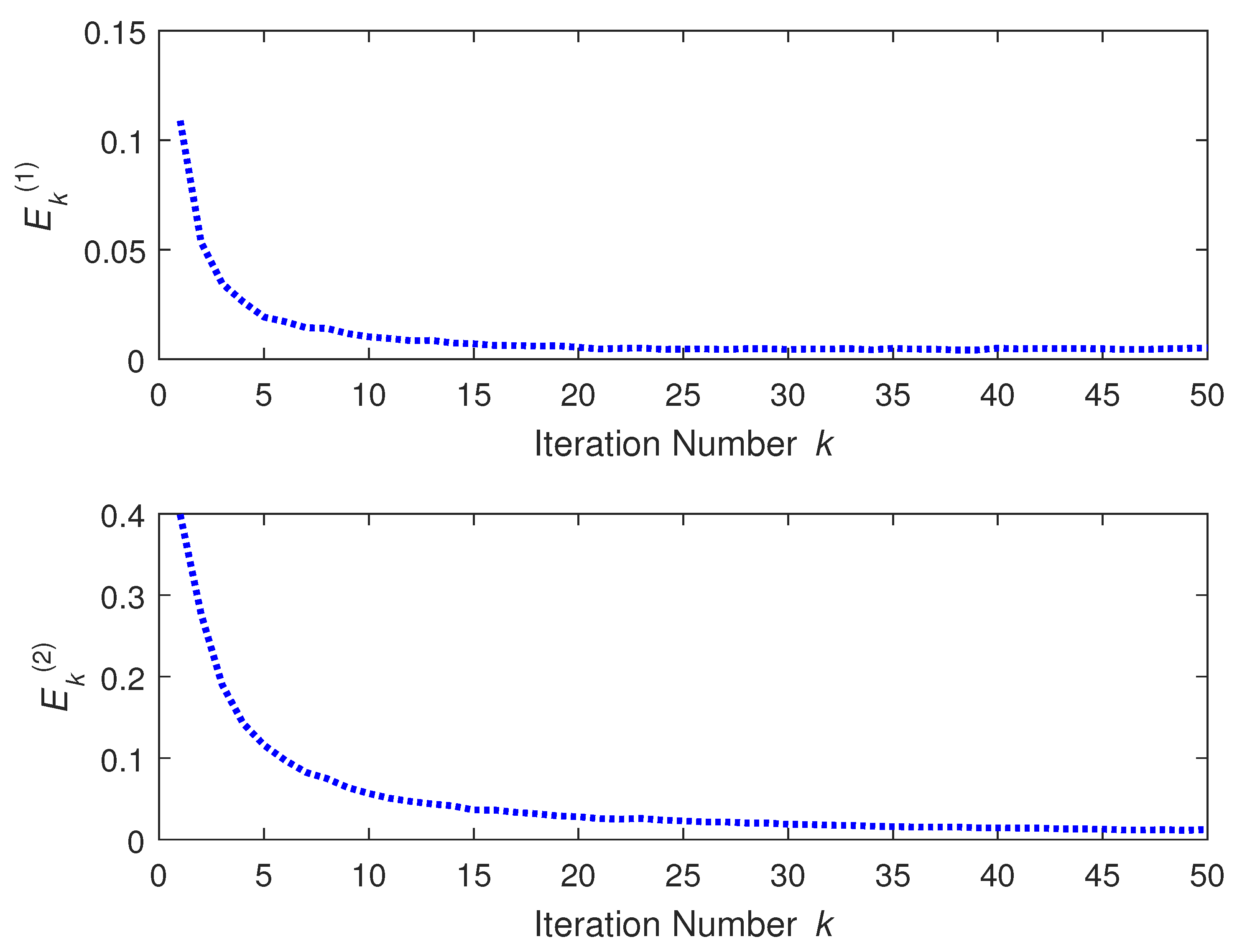
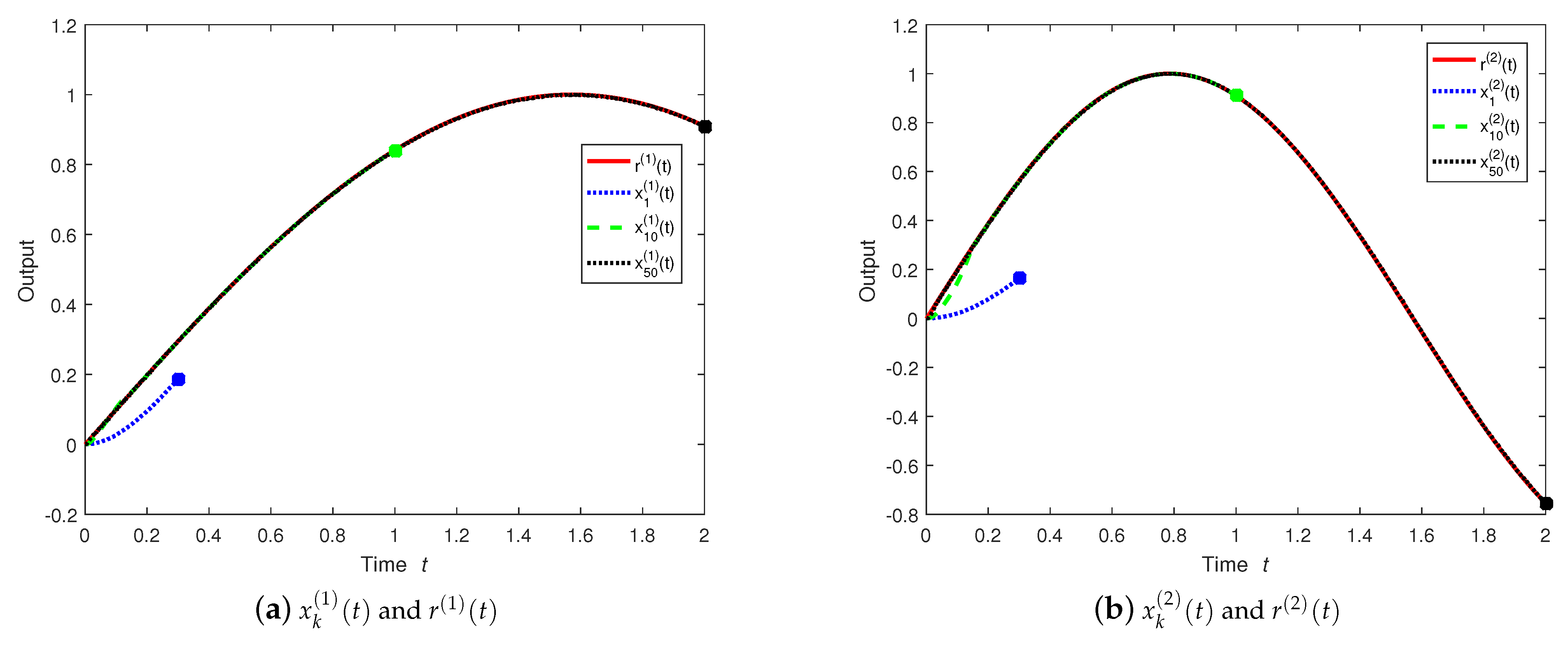
- The tracking reference allows it to be iteration-varying. Suffering from the nonuniform trial lengths, unknown external disturbance, and iteration-varying reference, a robot movement imitation with an uncalibrated camera system is used for simulation to verify the effectiveness of this method.
2. Problem Formulation
3. Adaptive AILC Designs with Convergence Analysis
4. Illustrative Example
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, J.X. A survey on iterative learning control for nonlinear systems. Int. J. Control 2011, 84, 1275–1294. [Google Scholar] [CrossRef]
- Bristow, D.A.; Tharayil, M.; Alleyne, A.G. A survey of iterative learning control. IEEE Control Syst. Mag. 2006, 26, 96–114. [Google Scholar]
- Shen, D.; Li, X. A survey on iterative learning control with randomly varying trial lengths: Model, synthesis, and convergence analysis. Annu. Rev. Control 2019, 48, 89–102. [Google Scholar] [CrossRef]
- Wan, K. Robust decentralized iterative learning control for large-scale interconnected systems described by 2-D Fornasini–Marchesini systems with iteration-dependent uncertainties including boundary states, disturbances, and reference trajectory. Int. J. Adapt. Control. Signal Process. 2022, 36, 3205–3229. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, J.; Yang, P.; Guo, S. Iterative learning sliding mode control for output-constrained upper-limb exoskeleton with non-repetitive tasks. Appl. Math. Model. 2021, 97, 366–380. [Google Scholar] [CrossRef]
- Liu, Y.; Fan, Y.; Jia, Y. Iterative learning formation control for continuous-time multi-agent systems with randomly varying trial lengths. J. Franklin Inst. 2020, 357, 9268–9287. [Google Scholar] [CrossRef]
- Arimoto, S.; Kawamura, S.; Miyazaki, F. Bettering operation of robots by learning. J. Robot. Syst. 1984, 1, 123–140. [Google Scholar] [CrossRef]
- Tayebi, A.; Chien, C.-J. A unified adaptive iterative learning control framework for uncertain nonlinear systems. IEEE Trans. Autom. Control 2007, 52, 1907–1913. [Google Scholar] [CrossRef]
- Xiao, T.; Li, H. Eigenspectrum-based iterative learning control for a class of distributed parameter system. IEEE Trans. Autom. Control 2017, 62, 824–836. [Google Scholar] [CrossRef]
- Meng, D.; Zhang, J. Convergence analysis of robust iterative learning control against nonrepetitive uncertainties: System equivalence transformation. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 3867–3879. [Google Scholar] [CrossRef]
- Jin, X. Iterative learning control for MIMO nonlinear systems with iteration-varying trial lengths using modified composite energy function analysis. IEEE Trans. Cybern. 2021, 51, 6080–6090. [Google Scholar] [CrossRef]
- Shi, J.; Xu, J.X.; Sun, J.; Yang, Y. Iterative learning control for time-varying systems subject to variable pass lengths: Application to robot manipulators. IEEE Trans. Ind. Electron. 2020, 67, 8629–8637. [Google Scholar] [CrossRef]
- Shen, M.; Wu, X.; Park, J.H.; Yi, Y.; Sun, Y. Iterative learning control of constrained systems with varying trial lengths under alignment condition. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 6670–6676. [Google Scholar] [CrossRef]
- Li, X.; Xu, J.X.; Huang, D. An iterative learning control approach for linear systems with randomly varying trial lengths. IEEE Trans. Autom. Control 2014, 59, 1954–1960. [Google Scholar] [CrossRef]
- Wei, Y.; Xu, Q. Iterative learning control for linear discrete-time systems with randomly variable input trail length. Complexity 2018, 2018, 2763210. [Google Scholar]
- Wei, Y.; Chen, Y.; Shang, W. Feedback higher-order iterative learning control for nonlinear systems with non-uniform iteration lengths and random initial state shifts. J. Franklin Inst. 2023, 360, 10745–10765. [Google Scholar] [CrossRef]
- Seel, T.; Seel, T.; Raisch, J. Monotonic convergence of iterative learning control systems with variable pass length. Int. J. Control 2017, 90, 393–406. [Google Scholar] [CrossRef]
- Wei, Y.; Wan, K.; Lan, X. Open-closed-loop iterative learning control for linear systems with iteratively variable trail lengths. IEEE Access 2019, 7, 132619–132627. [Google Scholar] [CrossRef]
- Shi, J.; He, X.; Zhou, D. Iterative learning control for nonlinear stochastic systems with variable pass length. J. Franklin Inst. 2016, 353, 4016–4038. [Google Scholar] [CrossRef]
- Liu, C.; Shen, D.; Wang, J. Adaptive learning control for general nonlinear systems with nonuniform trial lengths, initial state deviation, and unknown control direction. Int. J. Robust Nonlinear Control 2019, 29, 6227–6243. [Google Scholar] [CrossRef]
- Shen, D.; Xu, J.X. Adaptive learning control for nonlinear systems with randomly varying iteration lengths. IEEE Trans. Neural Netw. Learn. Syst. 2018, 4, 1119–1132. [Google Scholar] [CrossRef] [PubMed]
- Meng, D.; Moore, K.L. Robust iterative learning control for nonrepetitive uncertain systems. IEEE Trans. Autom. Control 2017, 62, 907–913. [Google Scholar] [CrossRef]
- Zhang, Y.; Ding, Y.; Qiu, B.; Wen, J.; Li, X. ZD method based nonlinear and robust control of agitator tank. Asian J. Control 2018, 20, 1464–1479. [Google Scholar] [CrossRef]
- Jiang, P.; Chen, H.; Bamforth, L. A universal iterative learning stabilizer for a class of MIMO systems. Automatica 2006, 42, 973–981. [Google Scholar] [CrossRef]
- Ding, Y.; Li, X.-D. A unified adaptive control approach of nonlinear continuous non-parameterized systems with asymmetric control gains for trajectory tracking in different domains. Int. J. Robust Nonlinear Control 2023, 33, 3964–3987. [Google Scholar] [CrossRef]
- Ding, Y.; Jia, H.; Zhang, Y.; Qiu, B. High-order modeling, zeroing dynamics control, and perturbations rejection for non-linear double-holding water tank. Mathematics 2023, 11, 2989. [Google Scholar] [CrossRef]
- Xu, Q.; He, W.; Zheng, C.; Xu, P.; Wei, Y.; Wan, K. Adaptive fuzzy iterative learning control for systems with saturated inputs and unknown control directions. Mathematics 2022, 10, 3462. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, Y.; Jia, H.; Wei, Y.; Xu, Q.; Wan, K. An Adaptive Learning Control for MIMO Nonlinear System with Nonuniform Trial Lengths and Invertible Control Gain Matrix. Electronics 2024, 13, 2896. https://doi.org/10.3390/electronics13152896
Ding Y, Jia H, Wei Y, Xu Q, Wan K. An Adaptive Learning Control for MIMO Nonlinear System with Nonuniform Trial Lengths and Invertible Control Gain Matrix. Electronics. 2024; 13(15):2896. https://doi.org/10.3390/electronics13152896
Chicago/Turabian StyleDing, Yaqiong, Hanguang Jia, Yunshan Wei, Qingyuan Xu, and Kai Wan. 2024. "An Adaptive Learning Control for MIMO Nonlinear System with Nonuniform Trial Lengths and Invertible Control Gain Matrix" Electronics 13, no. 15: 2896. https://doi.org/10.3390/electronics13152896
APA StyleDing, Y., Jia, H., Wei, Y., Xu, Q., & Wan, K. (2024). An Adaptive Learning Control for MIMO Nonlinear System with Nonuniform Trial Lengths and Invertible Control Gain Matrix. Electronics, 13(15), 2896. https://doi.org/10.3390/electronics13152896