



Telemedicine and Robotic Surgery: A Narrative Review to Analyze Advantages, Limitations and Future Developments


Abstract
:1. Introduction
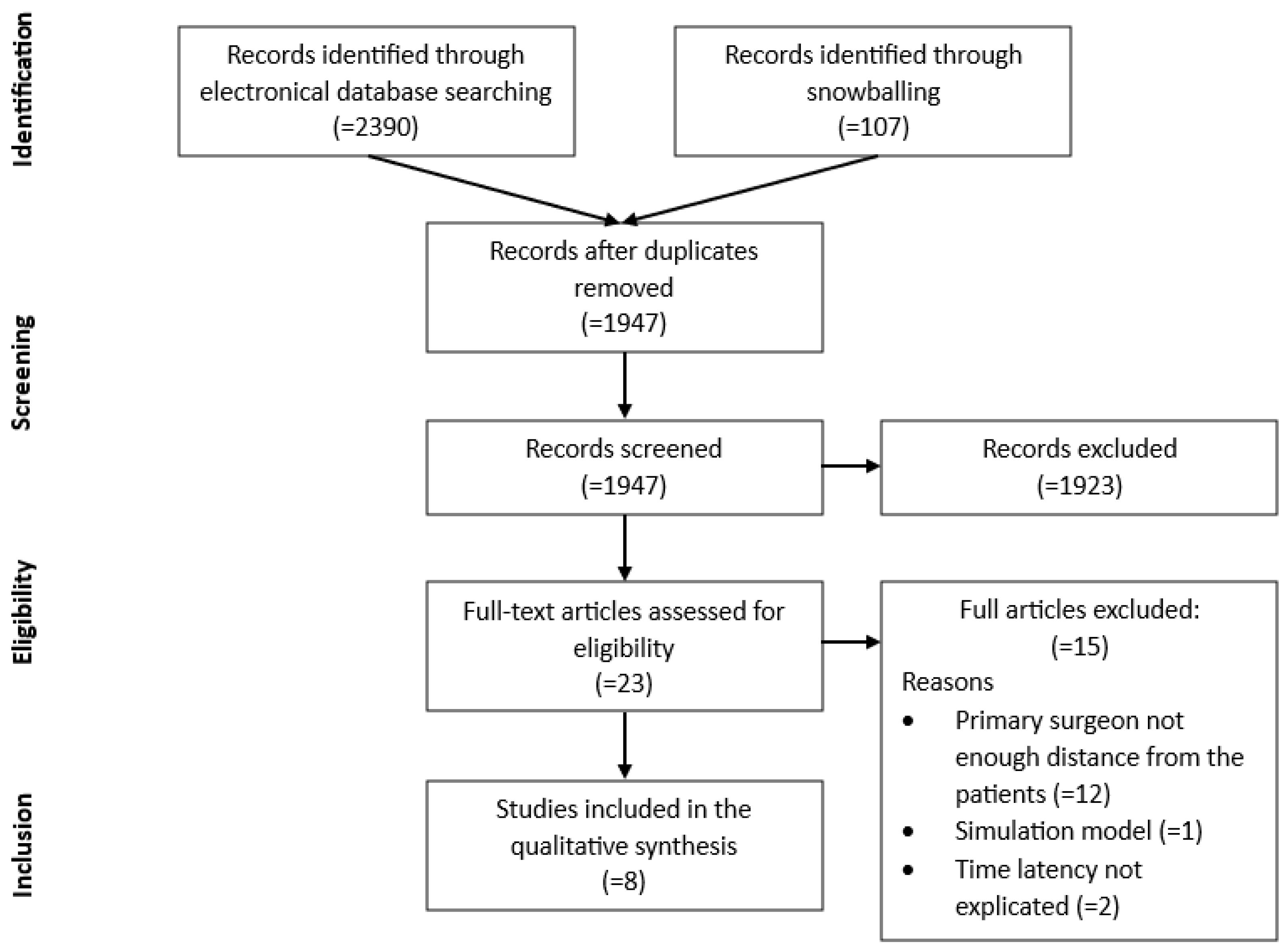
2. Materials and Methods
- Written in English language.
- Full articles written in English, excluding reviews, perspectives, communications, and case studies.
- Full text available.
- Published from 2001 to 2023.
- The operating surgeon and the patient must be located in different hospitals.
- The clinician located off-site must act as the primary surgeon.
- The paper reports information about latency time, robotic platform, and communication network used.
- Articles that contained simulation and tests about telesurgery.
- Papers centered on telementoring or telepresence.
- Studies which perform telesurgery in the same hospital.
3. Results
3.1. Evolution of Long-Distance Telesurgery
- Type of surgical procedure.
- Number of procedures.
- Number of surgeons performing the intervention.
- Success rate defined as was defined as the rate of successful remote procedure performed without conversion to other surgical procedures and no major intraoperative complications.
- Operation time.
- Latency time.
- Intraoperative bleeding occurrence.
- Hospital recovery time.
- Postoperative pain.
- Postoperative complication.
- Surgical precision.
- Remote operator personal evaluation of image quality, the impact of time lag and/or overall safety.
- Presence of an engineer or expert technician to ensure the connection and setup of the robot.
- Presence of a backup surgical team close to the patient capable of intervening in case of emergency.
3.2. Benefits
- Reduction in the level of invasiveness: telesurgery, adopting a minimally invasive approach, contributes to a noteworthy reduction in the overall invasiveness of surgical procedures.
- Reduction of blood loss: the minimally invasive nature of telesurgery leads to a substantial decrease in intraoperative blood loss, promoting patient safety.
- Less postoperative pain and discomfort: patients undergoing telesurgery experience diminished postoperative pain and discomfort compared to conventional surgical methods, enhancing the overall patient experience.
- Reduction in the risk of infection: the minimized incision size in telesurgery significantly lowers the risk of postoperative infections, a critical consideration in surgical interventions.
- Shorter hospitalization: telesurgery facilitates a quicker recovery process, contributing to shorter hospitalization periods for patients and thereby reducing healthcare costs.
- Removal of surgeon’s tremor: telesurgery, utilizing robotic systems, eliminates the inherent hand tremors of the surgeons, ensuring precise and controlled surgical maneuvers.
- Ergonomic posture for the physician: robotic systems in telesurgery enable surgeons to maintain ergonomic postures during procedures, minimizing fatigue and enhancing procedural accuracy.
- Improvement systems for the vision of anatomical structures: telesurgery incorporates advanced imaging systems that enhance the visualization of anatomical structures, aiding in meticulous surgical navigation.
- Ease of access to less accessible anatomical points: robotic instruments utilized in telesurgery offer increased dexterity, facilitating access to anatomical points that may be challenging with traditional surgical approaches.
- Mitigation of the risk of human error: the incorporation of robotic assistance in telesurgery mitigates the risk of human error, thereby contributing to improved overall surgical outcomes.
- Enhanced healthcare access: telesurgery serves as a beacon of hope for geographically remote or underserved populations by providing access to high-quality surgical care. Furthermore, this innovative approach extends its reach to special environments, such as battlefields or spacecraft, ensuring that individuals in unique and challenging circumstances receive prompt and efficient medical attention [5,6,14,15,21,27].
- Minimized travel burden: telesurgery significantly alleviates the burden on patients, allowing them to reduce extensive travel requirements associated with receiving specialized medical procedures. This reduction in travel is not merely a matter of convenience; it addresses broader issues such as financial constraints, health risks, travel restrictions, and time delays [8,28].
- Addressing surgeon shortages: telesurgery emerges as a potential panacea for the global shortage of surgeons. Leveraging remote technologies enables surgical expertise to transcend geographical boundaries, ensuring that patients in need can access surgical care regardless of the availability of local surgical professionals [5,29].
- Real-time collaborations: telesurgery facilitates seamless real-time collaborations between surgical professionals stationed at different healthcare facilities. This interconnectedness not only promotes knowledge sharing but also enhances the collective expertise of the surgical community, ultimately benefiting patients through a collaborative and interdisciplinary approach to healthcare [6,8,28].
- Remote surgical training: telesurgery extends its transformative impact to the realm of surgical education. On-site surgeons can engage in immersive learning experiences by connecting with remote experts. This educational exchange spans various levels of interaction, ranging from telementoring through video guidance to the integration of advanced remote robotic assistance. This not only augments the skills of existing surgeons but also contributes to the development of a robust and globally connected surgical community [29].
3.3. Limitation
- Latency issues: one of the primary hurdles faced by telesurgery is latency, which is defined as the delay in transmitting and receiving audio-visual feeds. The success of telesurgical procedures relies heavily on high-speed, low-latency networks to ensure real-time control for surgeons. Studies indicate that latency times exceeding 700–800 ms result in significant and unacceptable reductions in surgical performance, emphasizing the critical need for latency to remain under 300 ms. Ideally, latency times should be less than 100 milliseconds to avoid major inaccuracies in instrument handling during surgeries [28,30,31,32,33].
- Global network development: establishing a robust worldwide network that seamlessly connects every corner of the globe is a monumental challenge for launching telesurgical services. The creation of such a network is hindered by the substantial cost of high-speed telecommunications, particularly in developing countries [34].
- Financial costs: the implementation of telesurgery involves high expenses related to the acquisition and maintenance of robotic systems, presenting significant obstacles, especially in economically challenged regions. Additionally, the presence of a complete surgical team in the operating room to intervene in case of communication loss with the remote surgeon adds to the overall costs. Consequently, even if the communication means and the surgical robots are available at both hospitals, the cost of the operation remains higher compared to robotic surgery performed within the same facility [5,8,17].
- Regulatory and legal complexities: the development of comprehensive legal and regulatory frameworks for telesurgery, encompassing licensing and liability issues, is an ongoing and intricate process. Striking the right balance between innovation and patient safety is essential to foster the widespread acceptance and implementation of telesurgical practices [21,35].
- Cybersecurity and privacy concerns: the protection of sensitive patient data and safeguarding surgical procedures from cyber threats are paramount concerns in the realm of telesurgery. Establishing robust cybersecurity measures is crucial to maintaining patient confidentiality and the integrity of surgical processes [36].
3.4. Future Perspective and Emerging Trends
- Haptic feedback: it is a long-standing challenge in robotic surgery, affecting laparoscopic procedures. This technology could transform wireless robotic surgical systems, enabling operators to feel tissue consistency and suture tension and boosting confidence.To enhance precision and dexterity, upgrading the human-machine interface (HMI) and sensor-based instruments is crucial [37]. The research aims to develop a seamless haptic-enabled telesurgical system for accurate feedback.In 2015, the Telelap Alf-x prototype, featuring haptic feedback and eye-tracking technology, reduced cholecystectomy time [38].
- Augmented reality in telesurgery: augmented reality (AR) is a crucial tool in telesurgery, enabling remote visualization, robot control, and proximity alerts, ultimately enhancing surgical accuracy [39]. Studies have focused on improving the remote operators’ visualization and situational awareness in telesurgery using AR. This technology provides intuitive and immersive feedback on anatomical structures, instruments within the human abdominal cavity, and depth information. Furthermore, AR in telesurgery robotic systems offers advantages like improved hand-eye coordination, reduced cognitive load, enhanced remote collaboration, and decreased radiation exposure [39].Additionally, AR enhances telesurgery by facilitating remote visualization, robot control, and collaborative efforts, ultimately enhancing patient care [40]. Research studies, including those conducted by Lin et al. [41], Gasques et al. [42], and Huang et al. [43], illustrate the effectiveness of AR in improving remote visualization and providing real-time feedback during surgical procedures.The integration of AR into telesurgery robotic systems not only improves hand-eye coordination and reduces cognitive load [44,45] but also expands the possibilities for remote collaboration. AR addresses challenges related to latency by predicting robot motion [20,39,44]. These advancements underscore the profound impact of AR in enhancing efficiency and overcoming obstacles in the realm of telesurgery [40].
- High speed and quality telecommunication: the effectiveness of data sharing and the level of latency are contingent on the network’s bandwidth, which determines the data flow capacity. To achieve this, a telecommunication network with ample bandwidth, minimal delay, and minimal data loss is essential.5G wireless networks facilitated significantly improved data transmission stability, achieving speeds up to 100 times faster than their predecessors (10 GB/s) [24]. Thus, the application of 5G Internet can fulfill the telecommunication requirement.
4. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dasgupta, P.; Challacombe, B. Robotics in urology. BJU Int. 2004, 93, 247–248. [Google Scholar] [CrossRef] [PubMed]
- Challacombe, B.; Dasgupta, P. Telemedicine- the future of surgery. J. Surg. 2003, 1, 15–17. [Google Scholar] [CrossRef]
- American Telemedicine Association. Telemedicine: What is Telemedicine? American Telemedicine Association: Washington, DC, USA, 2018; Available online: https://www.americantelemed.org/about-telemedicine/what-is-telemedicine/ (accessed on 1 November 2023).
- World Health Organization. Telemedicine: Opportunities and Developments in Member States: Report on the Second Global Survey on eHealth; World Health Organization: Geneva, Switzerland, 2009. [Google Scholar]
- Xia, S.-B.; Lu, Q.-S. Development status of telesurgery robotic system. Chin. J. Traumatol. 2021, 24, 144–147. [Google Scholar] [CrossRef] [PubMed]
- Mohan, A.; Wara, U.U.; Shaikh, M.T.A.; Rahman, R.M.; Zaidi, Z.A. Telesurgery and Robotics: An Improved and Efficient Era. Cureus 2021, 13, e14124. [Google Scholar] [CrossRef] [PubMed]
- Ballantyne, G.H. Robotic surgery, telerobotic surgery, telepresence, and telementoring. Surg. Endosc. Other Interv. Tech. 2002, 16, 1389–1402. [Google Scholar] [CrossRef] [PubMed]
- Singh, S.K.; Sharma, J.; Joshua, L.M.; Huda, F.; Kumar, N.; Basu, S. Telesurgery and Robotics: Current Status and Future Perspectives. In Telehealth/Telemedicine—The Far-Reaching Medicine for Everyone and Everywhere; IntechOpen: Rijeka, Croatia, 2023. [Google Scholar] [CrossRef]
- Chu, G.; Yang, X.; Luo, L.; Feng, W.; Jiao, W.; Zhang, X.; Wang, Y.; Yang, Z.; Wang, B.; Li, J.; et al. Improved robot-assisted laparoscopic telesurgery: Feasibility of network converged communication. Br. J. Surg. 2021, 108, e377–e379. [Google Scholar] [CrossRef]
- Avgousti, S.; Christoforou, E.G.; Panayides, A.S.; Voskarides, S.; Novales, C.; Nouaille, L.; Pattichis, C.S.; Vieyres, P. Medical telerobotic systems: Current status and future trends. Biomed. Eng. Online 2016, 15, 96. [Google Scholar] [CrossRef]
- Arata, J.; Takahashi, H.; Yasunaka, S.; Onda, K.; Tanaka, K.; Sugita, N.; Tanoue, K.; Konishi, K.; Ieiri, S.; Fujino, Y.; et al. Impact of network time-delay and force feedback on tele-surgery. Int. J. Comput. Assist. Radiol. Surg. 2008, 3, 371–378. [Google Scholar] [CrossRef]
- Zemiti, N.; Ortmaier, T.; Morel, G. A new robot for force control in minimally invasive surgery. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No.04CH37566), Sendai, Japan, 28 September–2 October 2004; pp. 3643–3648. [Google Scholar] [CrossRef]
- Barba, P.; Stramiello, J.; Funk, E.K.; Richter, F.; Yip, M.C.; Orosco, R.K. Remote telesurgery in humans: A systematic review. Surg. Endosc. 2022, 36, 2771–2777. [Google Scholar] [CrossRef]
- Marescaux, J.; Leroy, J.; Gagner, M.; Rubino, F.; Mutter, D.; Vix, M.; Butner, S.E.; Smith, M.K. Transatlantic robot-assisted telesurgery. Nature 2001, 413, 379–380. [Google Scholar] [CrossRef]
- Marescaux, J.; Leroy, J.; Rubino, F.; Smith, M.; Vix, M.; Simone, M.; Mutter, D. Transcontinental Robot-Assisted Remote Telesurgery: Feasibility and Potential Applications. Ann. Surg. 2002, 235, 487–492. [Google Scholar] [CrossRef] [PubMed]
- Anvari, M.; McKinley, C.; Stein, H. Establishment of the World’s First Telerobotic Remote Surgical Service. Ann. Surg. 2005, 241, 460–464. [Google Scholar] [CrossRef] [PubMed]
- Anvari, M. Remote telepresence surgery: The Canadian experience. Surg. Endosc. 2007, 21, 537–541. [Google Scholar] [CrossRef] [PubMed]
- Patel, T.M.; Shah, S.C.; Pancholy, S.B. Long Distance Tele-Robotic-Assisted Percutaneous Coronary Intervention: A Report of First-in-Human Experience. EClinicalMedicine 2019, 14, 53–58. [Google Scholar] [CrossRef]
- Tian, W.; Fan, M.; Zeng, C.; Liu, Y.; He, D.; Zhang, Q. Telerobotic Spinal Surgery Based on 5G Network: The First 12 Cases. Neurospine 2020, 17, 114–120. [Google Scholar] [CrossRef]
- Acemoglu, A.; Krieglstein, J.; Caldwell, D.G.; Mora, F.; Guastini, L.; Trimarchi, M.; Vinciguerra, A.; Carobbio, A.L.C.; Hysenbelli, J.; Delsanto, M.; et al. 5G Robotic Telesurgery: Remote Transoral Laser Microsurgeries on a Cadaver. IEEE Trans. Med. Robot. Bionics 2020, 2, 511–518. [Google Scholar] [CrossRef]
- Li, J.; Yang, X.; Chu, G.; Feng, W.; Ding, X.; Yin, X.; Zhang, L.; Lv, W.; Ma, L.; Sun, L.; et al. Application of Improved Robot-assisted Laparoscopic Telesurgery with 5G Technology in Urology. Eur. Urol. 2023, 83, 41–44. [Google Scholar] [CrossRef]
- Johnson, B.; Resident, J. Robotic Telesurgery: Benefits Beyond Barriers Brief Review Robotic Telesurgery: Benefits Beyond Barriers. 2016. Available online: https://www.researchgate.net/publication/294875389 (accessed on 1 November 2023).
- Roy, S.; Evans, C. Overview of robotic colorectal surgery: Current and future practical developments. World J. Gastrointest. Surg. 2016, 8, 143–150. [Google Scholar] [CrossRef]
- Kutana, S.; Bitner, D.P.; Addison, P.; Chung, P.J.; Talamini, M.A.; Filicori, F. Objective assessment of robotic surgical skills: Review of literature and future directions. Surg. Endosc. 2022, 36, 3698–3707. [Google Scholar] [CrossRef]
- Palep, J. Robotic assisted minimally invasive surgery. J. Minimal Access Surg. 2009, 5, 1. [Google Scholar] [CrossRef]
- Lanfranco, A.R.; Castellanos, A.E.; Desai, J.P.; Meyers, W.C. Robotic Surgery. Ann. Surg. 2004, 239, 14–21. [Google Scholar] [CrossRef] [PubMed]
- Shahzad, N.; Chawla, T.; Gala, T. Telesurgery prospects in delivering healthcare in remote areas. J. Pak. Med. Assoc. 2019, 69 (Suppl. S1), S69–S71. [Google Scholar]
- Choi, P.J.; Oskouian, R.J.; Tubbs, R.S. Telesurgery: Past, Present, and Future. Cureus 2018, 10, e2716. [Google Scholar] [CrossRef] [PubMed]
- Lacy, A.M.; Bravo, R.; Otero-Piñeiro, A.M.; Pena, R.; De Lacy, F.B.; Menchaca, R.; Balibrea, J.M. 5G-assisted telementored surgery. Br. J. Surg. 2019, 106, 1576–1579. [Google Scholar] [CrossRef] [PubMed]
- Raison, N.; Khan, M.S.; Challacombe, B. Telemedicine in Surgery: What are the Opportunities and Hurdles to Realising the Potential? Curr. Urol. Rep. 2015, 16, 43. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.; Perez, M.; Yang, K.; Perrenot, C.; Felblinger, J.; Hubert, J. Effect of latency training on surgical performance in simulated robotic telesurgery procedures. Int. J. Med. Robot. Comput. Assist. Surg. 2015, 11, 290–295. [Google Scholar] [CrossRef] [PubMed]
- Korte, C.; Nair, S.S.; Nistor, V.; Low, T.P.; Doarn, C.R.; Schaffner, G. Determining the Threshold of Time-Delay for Teleoperation Accuracy and Efficiency in Relation to Telesurgery. Telemed. e-Health 2014, 20, 1078–1086. [Google Scholar] [CrossRef]
- Xu, S.; Perez, M.; Yang, K.; Perrenot, C.; Felblinger, J.; Hubert, J. Determination of the latency effects on surgical performance and the acceptable latency levels in telesurgery using the dV-Trainer® simulator. Surg. Endosc. 2014, 28, 2569–2576. [Google Scholar] [CrossRef]
- Memos, V.A.; Minopoulos, G.; Psannis, K.E. The Impact of IoT and 5G Technology in Telesurgery: Benefits & Limitations. Available online: https://www.researchgate.net/publication/336487138 (accessed on 2 November 2023).
- Valeriu, A. Telesurgery and Robotic Surgery: Ethical and Legal Aspect. J. Community Med. Health Educ. 2015, 5, 355. [Google Scholar] [CrossRef]
- Bonaci, T.; Herron, J.; Yusuf, T.; Yan, J.; Kohno, T.; Chizeck, H.J. To Make a Robot Secure: An Experimental Analysis of Cyber Security Threats against Teleoperated Surgical Robots. April 2015. Available online: http://arxiv.org/abs/1504.04339 (accessed on 2 November 2023).
- Schleer, P.; Kaiser, P.; Drobinsky, S.; Radermacher, K. Augmentation of haptic feedback for teleoperated robotic surgery. Int. J. Comput. Assist. Radiol. Surg. 2020, 15, 515–529. [Google Scholar] [CrossRef]
- Stark, M.; Pomati, S.; D’Ambrosio, A.; Giraudi, F.; Gidaro, S. A new telesurgical platform—Preliminary clinical results. Minim. Invasive Ther. Allied Technol. 2015, 24, 31–36. [Google Scholar] [CrossRef] [PubMed]
- Fu, J.; Rota, A.; Li, S.; Zhao, J.; Liu, Q.; Iovene, E.; Ferrigno, G.; De Momi, E. Recent Advancements in Augmented Reality for Robotic Applications: A Survey. Actuators 2023, 12, 323. [Google Scholar] [CrossRef]
- Dinh, A.; Yin, A.L.; Estrin, D.; Greenwald, P.; Fortenko, A. Augmented Reality in Real-time Telemedicine and Telementoring: Scoping Review. JMIR mHealth uHealth 2023, 11, e45464. [Google Scholar] [CrossRef] [PubMed]
- Lin, Z.; Zhang, T.; Sun, Z.; Gao, H.; Ai, X.; Chen, W.; Yang, G.-Z.; Gao, A. Robotic Telepresence Based on Augmented Reality and Human Motion Mapping for Interventional Medicine. IEEE Trans. Med. Robot. Bionics 2022, 4, 935–944. [Google Scholar] [CrossRef]
- Gasques, D.; Johnson, J.G.; Sharkey, T.; Feng, Y.; Wang, R.; Xu, Z.R.; Zavala, E.; Zhang, Y.; Xie, W.; Zhang, X.; et al. Artemis: A collaborative mixed-reality system for immersive surgical telementoring. In Proceedings of the Conference on Human Factors in Computing Systems, Online, 8–13 May 2021; Association for Computing Machinery: New York, NY, USA, 2021. [Google Scholar] [CrossRef]
- Huang, T.; Li, R.; Li, Y.; Zhang, X.; Liao, H. Augmented reality-based autostereoscopic surgical visualization system for telesurgery. Int. J. Comput. Assist. Radiol. Surg. 2021, 16, 1985–1997. [Google Scholar] [CrossRef]
- Fu, Y.; Lin, W.; Yu, X.; Rodriguez-Andina, J.J.; Gao, H. Robot-Assisted Teleoperation Ultrasound System Based on Fusion of Augmented Reality and Predictive Force. IEEE Trans. Ind. Electron. 2023, 70, 7449–7456. [Google Scholar] [CrossRef]
- Lin, Z.; Gao, A.; Ai, X.; Gao, H.; Fu, Y.; Chen, W.; Yang, G.-Z. ARei: Augmented-Reality-Assisted Touchless Teleoperated Robot for Endoluminal Intervention. IEEE/ASME Trans. Mechatron. 2022, 27, 3144–3154. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
| Source | Year | Type of Procedure | Surgical Platform | Connection Methods | Latency | Type of Subjects | Number of Subjects |
|---|---|---|---|---|---|---|---|
| Marceaux, J., et al. [14] | 2001 | Cholecystectomy (gall-bladder removal) | ZEUS, Computer Motion | Optical-fibre network that transports data through dedicated connections using asynchronous transfer mode (ATM) technology | 155 ms | Animal | 6 |
| Marceaux, J., et al. [15] | 2001 | Cholecystectomy | ZEUS, Computer Motion | ATM network connected via fiber optic cables | 155 ms | Human | 1 |
| Anvari, M., et al. [16] | 2005 | Laparoscopic Nissen fundoplication, laparoscopic right hemicolectomy, laparoscopic sigmoid/anterior resection, laparoscopic hernia repair | Zeus TS robotic platform, Computer Motion | IP/VPN network | 140 ms | Human | 21 |
| Anvari, M. [17] | 2007 | Laparoscopic Nissen fundoplication, laparoscopic right hemicolectomy, laparoscopicsigmoid/anterior resection, laparoscopic hernia repair | Zeus TS robotic platform, Computer Motion | IP/VPN network | 150 ms | Human | 22 |
| Patel, T. M., et al. [18] | 2019 | Robotic-assisted percutaneous coronary intervention with balloon angioplasty and stent deployment | CorPath GRX robotic system, Corindus Vascular Robotics | LAN/MAN/WAN connectivity | 53 ms | Human | 5 |
| Tian, W., et al. [19] | 2020 | Pedicle screw placement for thoracolumbar fractures, lumbar spondylolisthesis, and lumbar stenosis | TiRobot system | 5G network | 28 ms | Human | 12 |
| Acemoglu, A., et al. [20] | 2020 | Transoral laser microsurgeries on the vocal cords | Franka Emika Panda | 5G network | 102±9 ms | Cadaver | 1 |
| Li, J., at al. [21] | 2021 | Robot-assisted laparoscopic radical nephrectomy | The Micro Hand S system | 5G network | 176 ms | Human | 29 |
| Marceaux, J., et al. [14] | Marceaux, J., et al. [15] | Anvari, M., et al. [16] | Anvari, M. [17] | |
|---|---|---|---|---|
| Type of surgical procedure | Laparoscopic cholecystectomy | Laparoscopic cholecystectomy | 13 laparoscopic Nissen fundoplications, 2 laparoscopic right hemicolectomies, 4 laparoscopic anterior/sigmoid resections, and 2 laparoscopic hernia repairs | 13 laparoscopic Nissen fundoplications, 3 laparoscopic right hemicolectomies, 4 laparoscopic sigmoid/anterior resections, and 2 laparoscopic hernia repairs |
| Number of procedures | 6 | 1 | 21 | 22 |
| Number of surgeons performing the intervention | 3 | 1 | 2 | 2 |
| Success rate | 100% | 100% | 100% | 100% |
| Operation time | 45 min (mean) | 54 min | Laparoscopic Nissen fundoplications: 72 min, laparoscopic right hemicolectomies: 56 min, laparoscopic anterior/sigmoid resections: 111 min, laparoscopic hernia repairs: 27 min (mean) | Laparoscopic Nissen fundoplications: 75 min, laparoscopic right hemicolectomies: 75 min, laparoscopic anterior/sigmoid resections: 97.5 min, laparoscopic hernia repairs: 27.5 min (median) |
| Latency time | 155 ms | 155 ms | 135–140 ms | 150 ms |
| Intraoperative bleeding occurrence | Not available information | Not present | Not present | Not present |
| Hospital recovery time (days) | Not available information | 2 | Laparoscopic Nissen fundoplications: 1.6, laparoscopic right hemicolectomies: 4, laparoscopic anterior/sigmoid resections: 3.7, laparoscopic hernia repairs: 0 (median) | Laparoscopic Nissen fundoplications: 2, laparoscopic right hemicolectomies: 4, laparoscopic anterior/sigmoid resections: 3.5, laparoscopic hernia repairs: 0 (median) |
| Postoperative pain | Not available information | Not available information | Not available information | Not available information |
| Postoperative complication | Not available information | Not present | Out of the 13 patients who underwent laparoscopic Nissen fundoplication, two reported experiencing some dysphagia during the postoperative visit at 2 weeks, while a third patient presented with atypical chest pain at that time. | In laparoscopic Nissen fundoplication: Dysphagia requiring dilation (1 case) |
| Surgical precision | Not available information | Not available information | Not available information | Not available information |
| Remote operator personal evaluation of the image quality, impact of time lag and/or overall safety | Evaluation was on a 0–10 scale (where 0 is the worst possible and 10 is the best possible). Scores were 9.1 for the quality of the image, 8.5 for the impact of time lag (0, unacceptable impact; impact of time lag (0, unacceptable impact; 10, imperceptible impact), 9.2 for coordination of electrocautery, and 8.7 for overall safety | The overall safety of the procedure was intended as the combination of high-quality video images for appropriate visualization of structural and anatomic details, the ability to control surgical movements, and perfect coordination in the use of cautery for coagulation of vessels. All three surgeons rated 10 on the score of “perception of the safety of the operation” | Not available information | Not available information |
| Presence of an engineer or expert technician to ensure the connection and se-tup of the robot | Not available information | Not available information | Yes | Yes |
| Presence of a backup surgical team close to the patient capable of intervening in case of emergency | Not available information | Yes | Yes | Yes |
| Patel, T. M., et al. [18] | Tian, W., et al. [19] | Acemoglu, A., et al. [20] | Li, J., at al. [21] | |
| Type of surgical procedure | Robotic-assisted percutaneous coronary intervention | Thoracolumbar pedicle screw placement | Transoral laser microsurgeries on the vocal cords | Radical Nefrectomy |
| Number of procedures | 5 | 12 | 1 | 29 |
| Number of surgeons performing the intervention | 1 | 1 | 1 | 1 |
| Success rate | 100% | 100% | Not applicable | 100% |
| Operation time | 23.6 min (mean) | 142.5 min (mean) | Not available information | 67 min (median) |
| Latency time | 50 ms | 28 ms | 102 ms | 176 ms |
| Intraoperative bleeding occurrence | Not present | Not present | Not applicable | A singular elderly male patient received a prophylactic intraoperative transfusion of two units of red blood cells due to preoperative anemia. |
| Hospital recovery time (days) | 1 (mean) | Not available information | Not applicable | 8 (median) |
| Postoperative pain (method) | Not available information | Not available information | Not applicable | Low (Visual Analog Scale) |
| Postoperative complication | Not present | A patient diagnosed with lumbar spondylolisthesis preoperatively was discovered to have a cerebrospinal fluid (CSF) leak the day after the operation. This occurrence was deemed unrelated to the robotic manipulation of the screw implant but was associated with the nerve decompression procedure. | Not Applicable | Two elderly female patients encountered delayed healing of postoperative wounds and experienced mild intestinal obstruction; however, their prognosis remained unaffected. |
| Surgical precision | Not available information | The accuracy of pedicle screw placement was evaluated using Gertzbein–Robbins criteria. A total of sixty-two pedicle screws were surgically implanted. Among them, fifty-nine screws (95.2%) were classified as grade A according to the Gertzbein–Robbins criteria, while the remaining three screws received a grade B rating. The overall acceptable rate, considering grades A and B, was 100%. The deviation between the planned and actual positions of the pedicle screws averaged 0.76 ± 0.49 mm. | Not available information | Not available information |
| Remote operator personal evaluation of the image quality, impact of time lag and/or overall safety | Safety data were collected, as were questionnaire scores from the remote operator evaluating the robot-network composite, image clarity, and overall confidence in the procedure. The operator’s rating of the response time, device control, and ability to communicate with the local in-lab team were all rated as satisfied or extremely satisfied | Not available information | Not available information | Not available information |
| Presence of an engineer or expert technician to ensure the connection and se-tup of the robot | Not available information | Yes | Not available information | Yes |
| Presence of a backup surgical team close to the patient capable of intervening in case of emergency | Yes | Yes | Yes | Yes |
| Robotic Platform | Type of Patient Cart | Number of Robotic Arm | Degree of Freedom |
|---|---|---|---|
| Zeus TS robotic platform, Computer Motion | 3 independent patient-side units, each hosting a robotic arm | 3 | 4 |
| CorPath GRX robotic system, Corindus Vascular Robotics | 1 independent patient side unit, with 1 robotic arm | 1 | - |
| TiRobot system | 1 independent patient side unit, with 1 robotic arm | 1 | 6 |
| Franka Emika Panda | 1 independent patient side unit, with 1 robotic arm | 1 | 7 |
| The Micro Hand S system | Single patient cart | 3 | 7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Picozzi, P.; Nocco, U.; Puleo, G.; Labate, C.; Cimolin, V. Telemedicine and Robotic Surgery: A Narrative Review to Analyze Advantages, Limitations and Future Developments. Electronics 2024, 13, 124. https://doi.org/10.3390/electronics13010124
Picozzi P, Nocco U, Puleo G, Labate C, Cimolin V. Telemedicine and Robotic Surgery: A Narrative Review to Analyze Advantages, Limitations and Future Developments. Electronics. 2024; 13(1):124. https://doi.org/10.3390/electronics13010124
Chicago/Turabian StylePicozzi, Paola, Umberto Nocco, Greta Puleo, Chiara Labate, and Veronica Cimolin. 2024. "Telemedicine and Robotic Surgery: A Narrative Review to Analyze Advantages, Limitations and Future Developments" Electronics 13, no. 1: 124. https://doi.org/10.3390/electronics13010124
APA StylePicozzi, P., Nocco, U., Puleo, G., Labate, C., & Cimolin, V. (2024). Telemedicine and Robotic Surgery: A Narrative Review to Analyze Advantages, Limitations and Future Developments. Electronics, 13(1), 124. https://doi.org/10.3390/electronics13010124