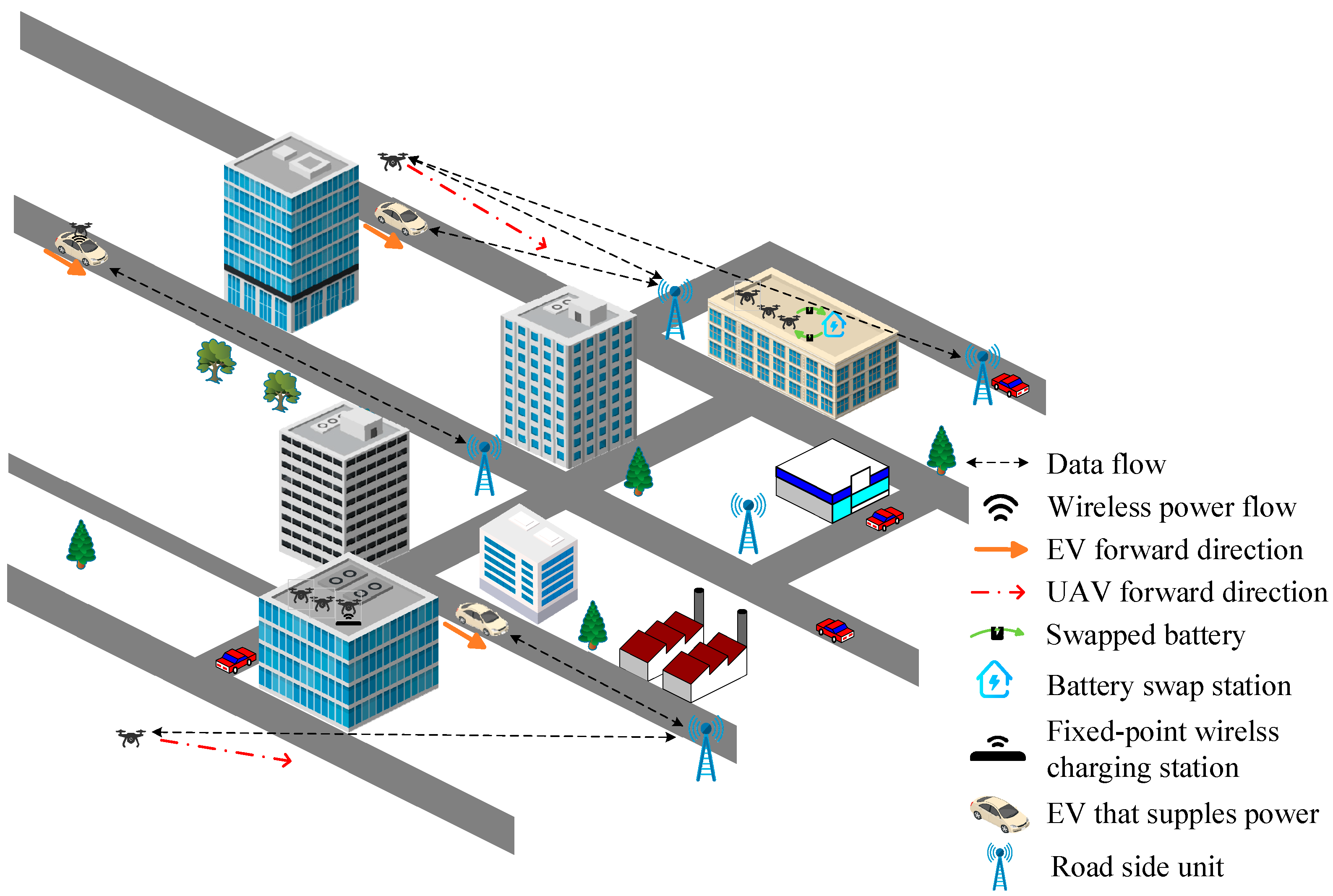
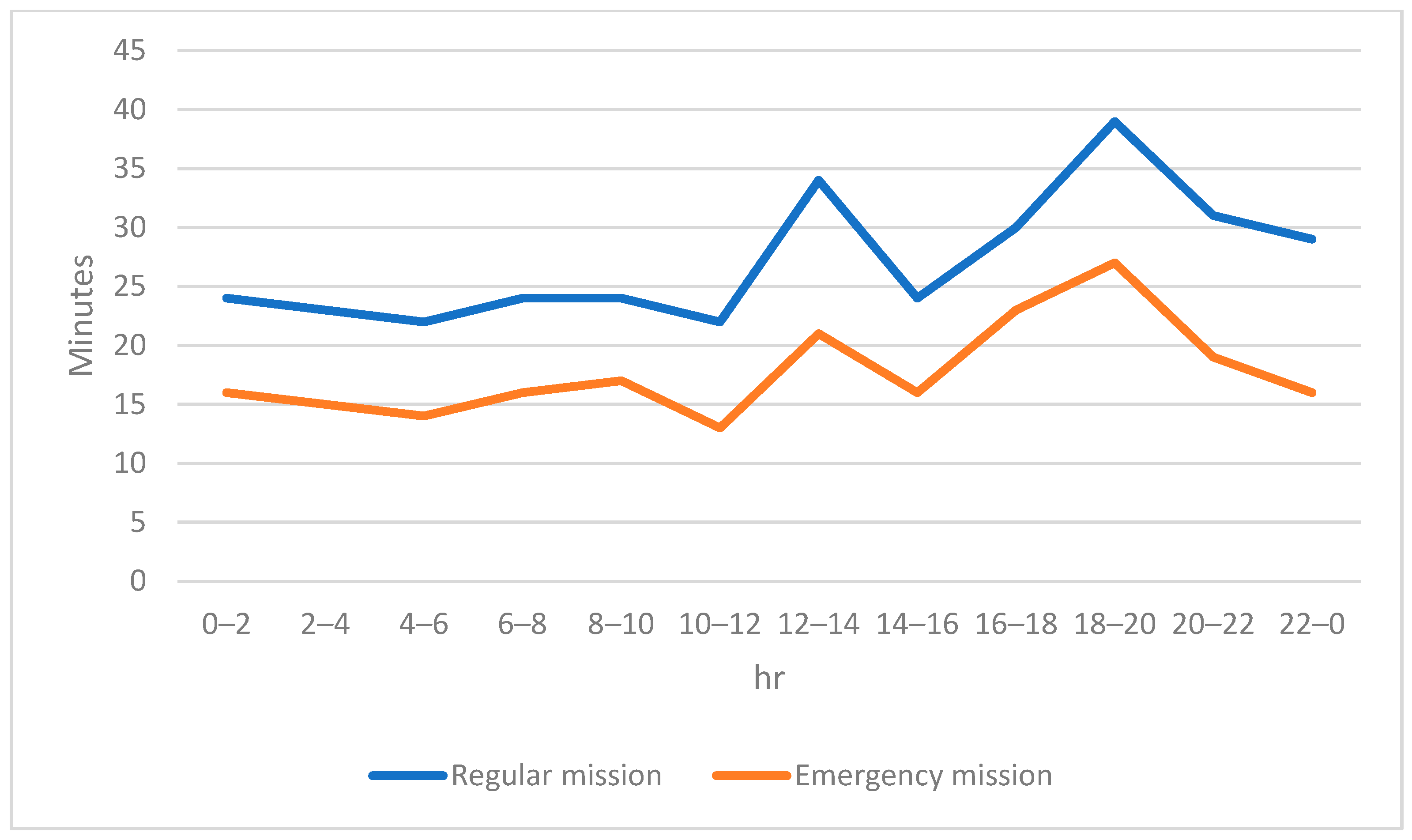
Two types of flight missions are performed by a UAV in this study, including a regular mission such as ordinary logistics, and an emergency mission, such as medical supplies or fresh food delivery services. A UAV operator always puts the charging cost as the first consideration in the determination of flight paths of UAVs on regular missions, whereas the operator of a UAV on emergency mission is willing to charge at a higher cost to avoid spending too much time waiting for charging because this type of UAV has a time constraint on arrival at its destination.
As shown in
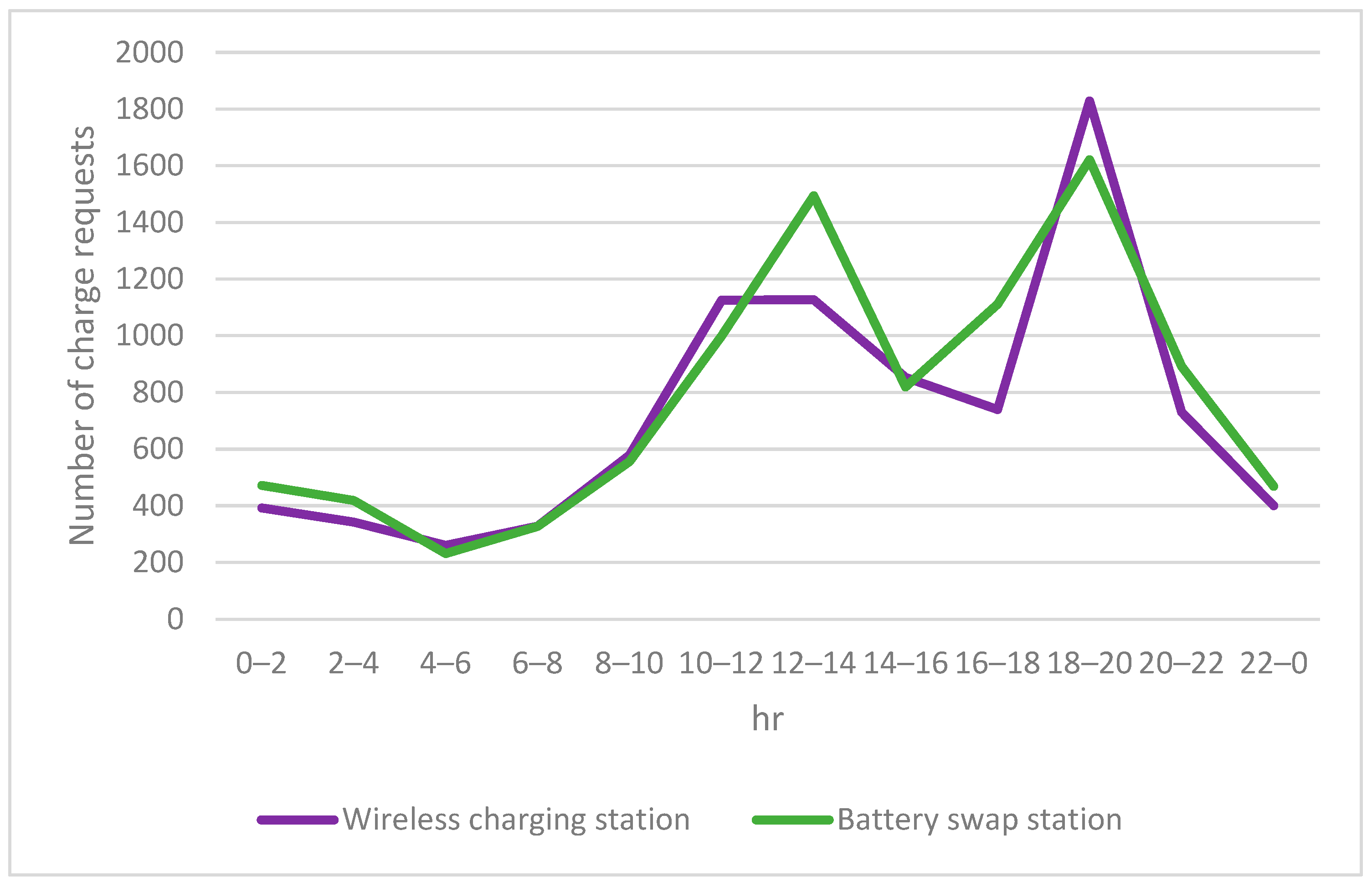
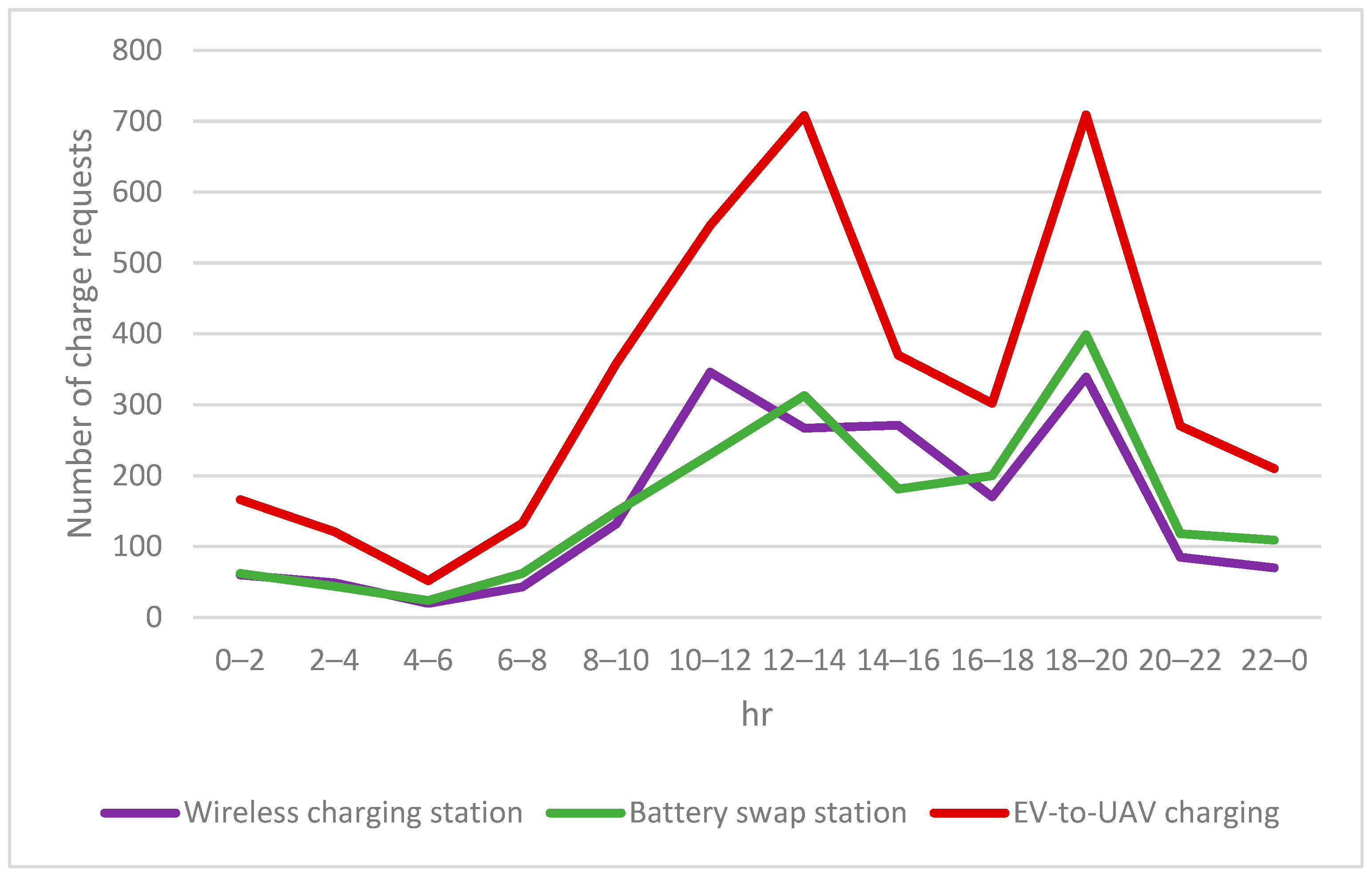
Figure 1, this work adopts two traditional charging methods from the literature, i.e., fixed-point wireless charging stations and battery exchange facilities built on the roofs of two buildings recharge the battery power of the UAVs on regular missions. This type of UAV requires longer waiting times for charging in exchange for lower charging fees during peak periods. On the other hand, for the UAVs performing emergency missions, the EV-to-UAV charging method, as shown in the bottom right of
Figure 1, is selected as the preferred charging option in order that the UAVs can complete their flight mission in time. In this study, roadside units (RSUs) as shown in
Figure 1 are responsible for coordinating battery charging between a moving EV and a UAV requesting power. If an EV can offer power to a UAV with a recharging need, the EV will inform the RSUs located on the way to its destination of the available electricity when the EV traverses the road sections that the corresponding RUSs govern. Meanwhile, a UAV that requires power will contact the RSUs close to its current flight route to check if any moving EV is available to charge the battery of the UAV.
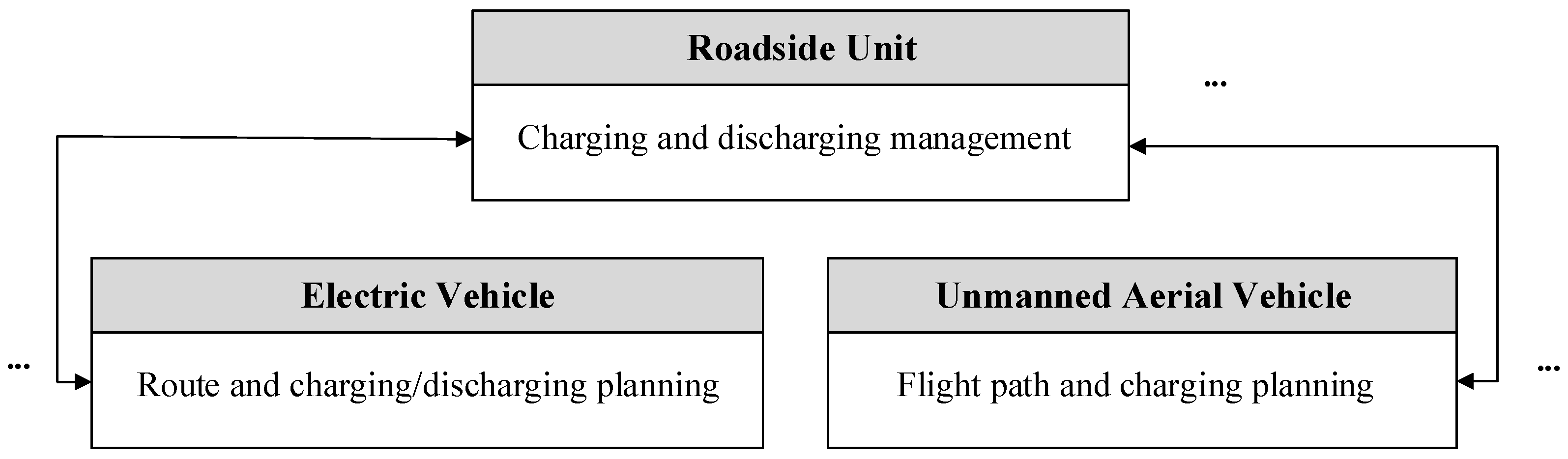
2.1. Route and Charging and Discharging Planning for an EV
This module is used to determine the route and charging path of an EV before its departure based on the existing road traffic information in the EV database as the input data. Here, we assume an EV driver will set up a route at the start of the journey and informs the RSU of the estimated arrival time of the EV at each section of the route. The EV will also check the battery status of the EV when planning the route. If it is found that the EV will run out of battery power before reaching its destination, the EV users can choose the appropriate charging option based on their personal needs or cost considerations.
This module offers three charging options for EV users, including plug-in charging, battery exchange, and dynamic wireless charging on the road. Plug-in charging stations are relatively inexpensive because they take longer to charge, so an EV user who is unable to charge their EV due to the limited number of plug-in charging docks at their home or office can choose the nearest plug-in charging station that charges less. Battery exchange stations take less time to exchange batteries, but can lengthen the wait time for battery replacement due to the influx of too many vehicles. The wireless road charging method eliminates the waiting and charging time because it can charge while driving. However, the charging cost is the highest. Only when there is an urgent need for charging will EV users choose the most expensive wireless road charging option.
By adopting the existing road traffic information in the EV database as the input data, this module first determines the cost of each route by the time the EV is scheduled to pass through each road segment, and up to
K candidate routes are generated using the Yen shortest route algorithm [
29] and ranked by distance travelled. A candidate route can be denoted as:
where
l is the index of the candidate route,
,
, and
represent the starting location of candidate route
l, the
ith intersection on the route, and the destination of EV
, respectively. Notably, the sorted candidate route list is generated by satisfying the following constraint:
where
stands for the length of the road section between intersections
and
on
’s route.
Starting with
’s first candidate route in the sorted list, examine if there is a route that satisfies the following constraint of
’s battery electricity:
where
and
represent the battery storage capacity of EV
at the time of its departure and the lower limit of its battery storage capacity, respectively.
represents the battery consumption per kilometer of
, and
is the total distance of the lth candidate route of
.
If there is a route among the
K candidate ones that satisfies the constraint as given in Equation (3), the route with the lowest index value is selected as the EV’s route, and the following equation is also calculated to compute the electricity that the EV
can offer for a UAV in need of power, and the module is terminated.
where
stands for the remaining power of
before leaving the roadway connecting
and
.
denotes the charging efficiency of
’s battery.
Otherwise, the list of candidate routes according to the EV user’s preference. This module needs to compute the time for
to reach each intersection on its way to the destination as follows:
where
denotes the time that
reaches the road intersection indexed by
on the
lth candidate route.
represents the time spent by
σ that travels the roadway connecting
and
after the EV passes
, while
denotes the time spent at road intersection
owing to traffic light control.
stands for the waiting time for the battery of
before charging at the plug-in charging station
, while
and
represent the waiting time and battery replacement time spent at the battery exchange service facility
, respectively. Given the effectiveness of machine learning in predicting road travel times, this work uses support vector regression (SVR) [
30] techniques to calculate the five above parameters based on the history data. The binary flags
and
are used to indicate whether
is charged using a plug-in charging station or battery exchange service facility with index
. In addition, all plug-in charging stations and battery exchange service facilities are treated as road crossings to simplify the calculation.
Based on the arrival time at each road intersection on the way to the destination,
’s battery storage capacity after it reaches each road intersection ahead can be determined by satisfying the following constraints:
where
stands for the charging power of a plug-in charging station, while
is the charging power of the wireless charging pad paved on the road section connecting
and
. The binary flag
is used to indicate whether
is charged using a road wireless charging pad between
and
.
denotes the upper limit of
’s battery storage capacity.
and
denote the actual and allowed upper limit of charging time for the battery of
at the plug-in charging station
, respectively.
The route and charging path of
can be the computed subject to the above-mentioned constraints:
subject to Equations (2)–(10).
In the optimization formulation, as given in Equation (11), l represents the decision variables in the arg min(·) operation. The three parameters from left to right in the calculation represent the travel time from the departure point to the destination, the total distance traveled to the destination, and the charging cost of an EV σ battery, respectively. Notably, EV users can set the three weights, , , and , according to their needs. If the EV battery has enough power to reach the destination, will be set to zero. stands for the real-time charging price of the plug-in charging or battery exchange service for EV σ at road intersection at time . denotes the real-time charging price of the road wireless charging panel for EV σ traveling through the road section connecting and at time , while represents the charging time of the wireless charging on the road section connecting and . Again, SVR is adopted to estimate the above-mentioned three parameters based on the historical data.
After the route for EV σ is determined by Equation (11), this module checks if σ does not need to be charged before arriving at its destination and is willing to offer the excess battery electricity to a UAV in need of power that flies near the road section between the and at a similar time. If so, the RSUs of the road section between the and will be notified of the time of arrival at the section, the excess battery electricity of the EV, the charging power, and the charging price.
The module then performs background execution mode. The arrival time at the roadway is recalculated at fixed time intervals. If the estimated time of arrival at the roadway is different from the original estimate due to traffic congestion during peak hours or a schedule change of the EV user, the RSU in charge of the roadway will be notified of the updated arrival time.
The step-by-step description of the Algorithm 1 is given below:
| Algorithm 1 Route and Charging and Discharging Planning for an EV |
| Step 1: | Before the departure of the EV, apply Yen Shortest Path algorithm [29] to select at most K shortest routes of the EV. |
| Step 2: | Sort the candidate route list in ascending order of driving distance. |
| Step 3: | Select the candidate route with the smallest index in the list that satisfies the constraint, as specified in Equation (3). |
| Step 4: | If a route is found at Step 3, compute the electricity that the EV can offer for a UAV in need of power on the way to the EV’s destination as given in Equation (4), and then proceed to Step 7. |
| | Otherwise, proceed to the next step. |
| Step 5: | Use Equation (11) to compute the suitable route for the EV by satisfying the constraints specified from Equations (2)–(10). |
| Step 6: | Notify the RSUs located on the way of the EV’s destination, including the excess battery electricity, that the EV can offer a UAV in need of power. |
| Step 7: | The time that the moving EV reaches each intersection ahead is recalculated at fixed time intervals. |
| Step 8: | If the updated arrival time is different from the original estimate, all RSUs in charge of the roadways will be timely notified. Proceed to Step 7. |
2.2. Flight Path and Charging Planning for a UAV
This module first adopts the UAV path selection algorithm proposed in [
31] to select multiple candidate flight routes for UAVs, assuming real-time positions and velocities of obstacle aircraft are available for the application of the algorithm given in [
31]. A flight route and charging planning integration solution that fits each individual UAV is then selected according to the charging requirements and cost considerations of the UAV operator. The UAV path selection algorithm in [
31] is chosen in this work because this algorithm can avoid fixed and moving obstacles when calculating flight paths.
A list of up to
K flight paths for a UAV is first generated by using the algorithm in [
31] and the list is sorted in ascending order by flight distance. A candidate flight path can be denoted as:
where
l is the index of the candidate flight path,
,
, and
represent the starting location of candidate flight path
l, the
ith intersection on the flight path, and the destination of UAV
, respectively.
Then, this module examines whether there is a flight path that satisfies the following constraint:
where
is the index of the UAV,
,
, and
represent the starting position of the candidate flight route with index value
l, the
ith waypoint on candidate route
l, and the destination, respectively.
and
denote the battery storage capacity of UAV
at the time of departure and the lower limit of the battery storage capacity, respectively.
stands for the battery power consumption per kilometer of UAV
.
represents the length of the UAV
flight route between the waypoints
and
, and
is the total distance of candidate route
l.
If any flight path(s) that satisfy the constraint as given in Equation (13) among the
K candidate ones are available, the flight path with the lowest index value is selected as the flight path of UAV
, and the module is terminated. Otherwise, this module employs the algorithm given in [
31] to select the flight path from the origin to a designated charging point and then from the charging point to the destination by satisfying the constraints given below.
Assuming a candidate flight path generated by the algorithm given in [
31],
is expressed as follows:
where
l is the index of UAV
’s candidate flight path,
,
, and
represent the starting location of candidate flight path
l, the
ith waypoint on the flight path, and the destination of
, respectively. Equation (15) is used to ensure the departure and the destination of the updated flight route are identical to the original ones.
This module computes the time for UAV
to reach the
ith waypoint on its way to the destination if the EV-to-UAV charging option is chosen:
where
denotes the time that UAV
reaches the waypoint indexed by
on the
lth candidate flight path. The binary flag
is used to indicate whether an EV traveling between
and
will offer
the electricity.
represents the pointer to the EV’s record that can offer power to
at the road section connecting
and
, and the attributes
AT of
stand for the time that the EV arriving at
. Accordingly, Equation (16) is used to express the possible delay time at the meeting point of UAV
and the EV supplying power. Notably,
can be determined by:
where
denotes the pointer to the first record of the EV charging supply list that is kept at the RSU governing the road section connecting
and
.
is the current time, and
denotes the index for the time interval that
arrives at
. Notably, the EV charging supply list is sorted in ascending order by the amount of electricity that can be supplied by the EVs on the list, and Equation (18) is used to locate the EV that matches the electricity required by
as far as possible.
The (
i+1)th waypoint on the way to the UAV’s destination can be determined by incorporating the possible charging delay as follows:
where the binary flags
and
are used to mark whether
will recharge at a fixed-point wireless charging station or battery swap facility located at
.
denotes the charging time of UAV
β if the EV-to-UAV charging option is chosen,
stands for the waiting time at the wireless charging station,
and
represent the waiting time and battery swapping time at the battery exchange service located at
, respectively.
stands for the takeoff and landing time at the charging site, while
denotes the actual charging time of the battery at the fixed-point wireless charging station.
is the flight speed of UAV
β. Again, SVR is used to calculate the
,
, and
based on the historical data. In addition, Equation (20) is used to reflect the fact that
β moves with the EV while
gets charged from the EV.
The battery storage capacity of
β after reaching each waypoint ahead can be determined by satisfying the following constraints:
where
,
, and
stand for the charging power, the actual charging time, and maximum charging time of the UAV’s battery at the fixed-point wireless charging station located at
, respectively.
and
represent the upper and lower limits of the EV’s battery capacity, respectively, and
denotes the remaining battery capacity when
β reaches
.
denotes the electricity that the EV offers
β at the road section connecting
and
.
stands for the battery power consumption of the UAV per kilometer, and
denotes the charging efficiency of its battery. The attributes
ERE, ECP, SD and
ERP stand for the maximum amount of power that can be provided by the EV, charging power, passing time of the road section, and electricity price of
, respectively. Notably, Equation (24) is used to ensure that the electricity
β gets charged from the EV should not exceed the maximum amount of electricity the EV can offer, Equation (25) is used to set the charging time of
β less than or equal to the length of the road section connecting
and
, and Equation (26) is used to ensure one of the three charging options should be chosen if the battery electricity of
β is not enough to arrive at the destination.
The flight path of
β can be updated subject to the above-mentioned constraints:
subject to Equations (14)–(26).
In the optimization formulation, as given in Equation (27), l represents the decision variables in the arg min(·) operation. The three parameters from left to right in the calculation represent the flight time, flight distance, and the battery charge cost of UAV β from the origin to the destination, respectively. The UAV operator can set the weight values of , , and according to the specific needs of the UAV’s mission. If UAV β has enough power to reach the destination, it does not need to charge its battery on the way to its destination and will be set to zero accordingly. denotes the real-time charging power of a fixed-point wireless charging station or battery exchange service located at at time .
The step-by-step description of the Algorithm 2 is given below:
| Algorithm 2 Flight Path and Charging Planning for a UAV |
| Step 1: | Before the take-off of the UAV, apply the UAV path selection algorithm proposed in [31] to select up to K candidate flight paths for the UAV in ascending order of the UAV’s flight distance. |
| Step 2: | Check if any flight paths in the candidate list satisfy the constraint, as specified in Equation (13). |
| Step 3: | If any flight paths are found at Step 2, select the candidate flight path with the smallest index in the list as the flight path of the UAV, and terminate this module. |
| | Otherwise, proceed to the next step. |
| Step 4: | Use Equation (27) to compute a suitable route for the UAV by satisfying the constraints specified from Equations (14)–(26). |
2.3. Charging and Discharging Management at The Roadside Unit
After an EV determines the route to its destination before departure, it will notify the RSUs at the sections on the way to the destination of the amount of power that can be supplied by the EV’s battery based on the times of the EV reaching the corresponding sections. The RSUs that receive the notifications will then create a list of power supplies in ascending order of the selling price of the power. Each record in the list contains five attributes: the EV ID, the time of arrival at the road section, the amount of electricity available, the charging power, the price of the electricity, and the pointer to the next record. Upon receipt of a request for electricity supply from a UAV, the RSU will select the EV with the lowest price from the electricity supply list and notify the UAV and the EV that supplies the electricity. As the actual arrival times of EVs at the road sections may vary from the predicted time due to congestion during peak hours or an unexpected change of schedule, EVs or UAVs arriving earlier will wait for those arriving later at the designated meet point. The RSUs in charge of the road sections also update the electricity supply information of the corresponding road sections immediately by moving the EVs from the original scheduled time slots to the post-change time slots according to the notification of the updated arrival times of the EVs.
This module inserts and records a new electricity supply record whenever the RSU is notified by an EV providing power that will travel through the road section that the RSU governs as follows:
where
p denotes the meet point (intersection) at which EV
σ arrives,
,
,
, and
represent the time at which EV
σ arrives at the intersection, the amount of electricity and charging power that can be provided at the road section connecting
p and
q, and the price of electricity, respectively. The six attributes of
, including
,
,
,
ECP,
SD and
ERP represent the
ID of the EV, arrival time of the EV at
p, the power available, the charging power and time spent on the road section, and the electricity price.
This module then adds the record of EV
σ into the list by searching for the record right below the price of electricity claimed by EV
σ and add the new record thereafter:
where
represents the pointer to the first record of the power supply list on the road section connecting
p and
q in period
τ, the indicator of the next record in the
NEXT attribute, and
is the current time.
Next, the module enters background execution mode. If a notification is received for an EV that does not arrive on time at the designated road section, it will be removed from the corresponding power supply list and the EV arriving at a later time will be added to the power supply list during the updated arrival time period:
where
and
are the original estimated arrival time and the updated arrival time of EV
σ at the meeting point indexed by
p, respectively.
and
denote the pointer to the record of EV
σ and its electricity price at the arrival time.
This module then continues with the background execution mode. If a new power supply notification of an EV is received, start from Equation (28) to execute the next iteration of this module.
If a request of electricity supply for a UAV is received, the EV that can meet the electricity demand with the lowest electricity price is selected from the power supply list recorded in the RSU. The supplying EV will also inform all RSUs on the rest of the road sections it will travel through to update the amount on the electricity supply recorded in the above-mentioned RSUs. The electricity supply information updated in each of these RSUs is shown as follows:
where
is the battery power required by UAV
γ on the road section between
p and
q. This module then continues with the background execution mode after the amount of electricity that can offered by the EV is updated.
The step-by-step description of the Algorithm 3 is given below:
| Algorithm 3 Charging and Discharging Management at The Roadside Unit |
| Step 1: | Use Equations (28)–(34) to insert a new electricity supply record after the RSU is notified by an EV providing power that it will travel through the road section that the RSU governs. |
| Step 2: | Use Equations (35)–(38) to add the record of the EV into the list by searching for the record right below the price of electricity claimed by EV and add the new record thereafter. |
| Step 3: | This module enters background execution mode. |
| Step 4: | If a notification is received for an EV that does not arrive on time at the designated road section, use Equations (39)–(46) to move the EV’s record to the list at the corrected arrival time period. Proceed to Step 3. |
| Step 5: | If a new power supply notification of an EV is received, start from Equation (28) to execute the next iteration of this module. |
| Step 6: | If a request of electricity supply for a UAV is received, the EV that meets the electricity demand with the lowest electricity price is selected from the power supply list recorded at the RSU. |
| | Use Equations (47)–(49) to update the EV’s electricity supply record. Proceed to Step 3. |





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









