
Selection of the Depth Controller for the Biomimetic Underwater Vehicle


Abstract
1. Introduction
2. Materials and Methods
2.1. Control Object
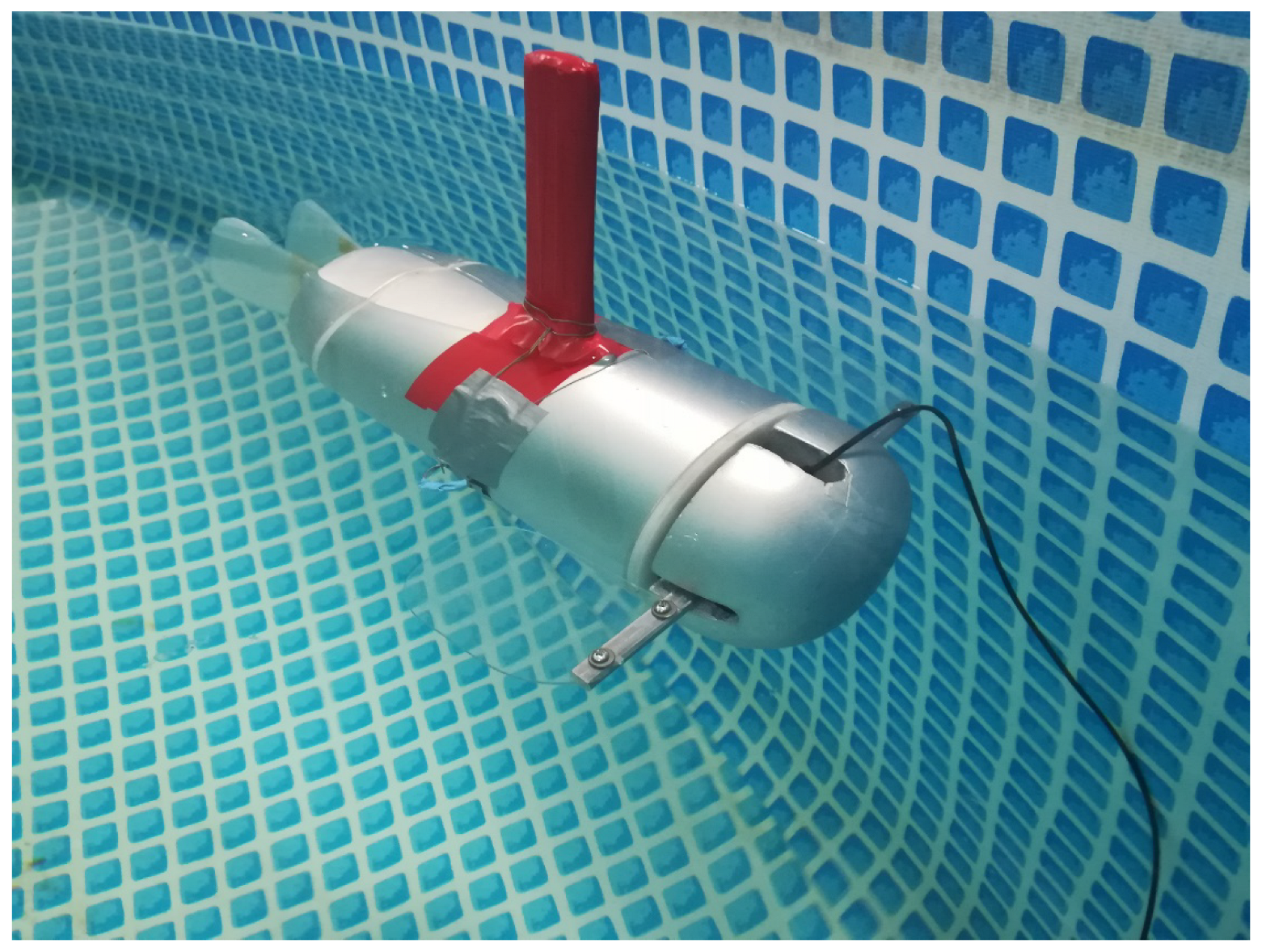
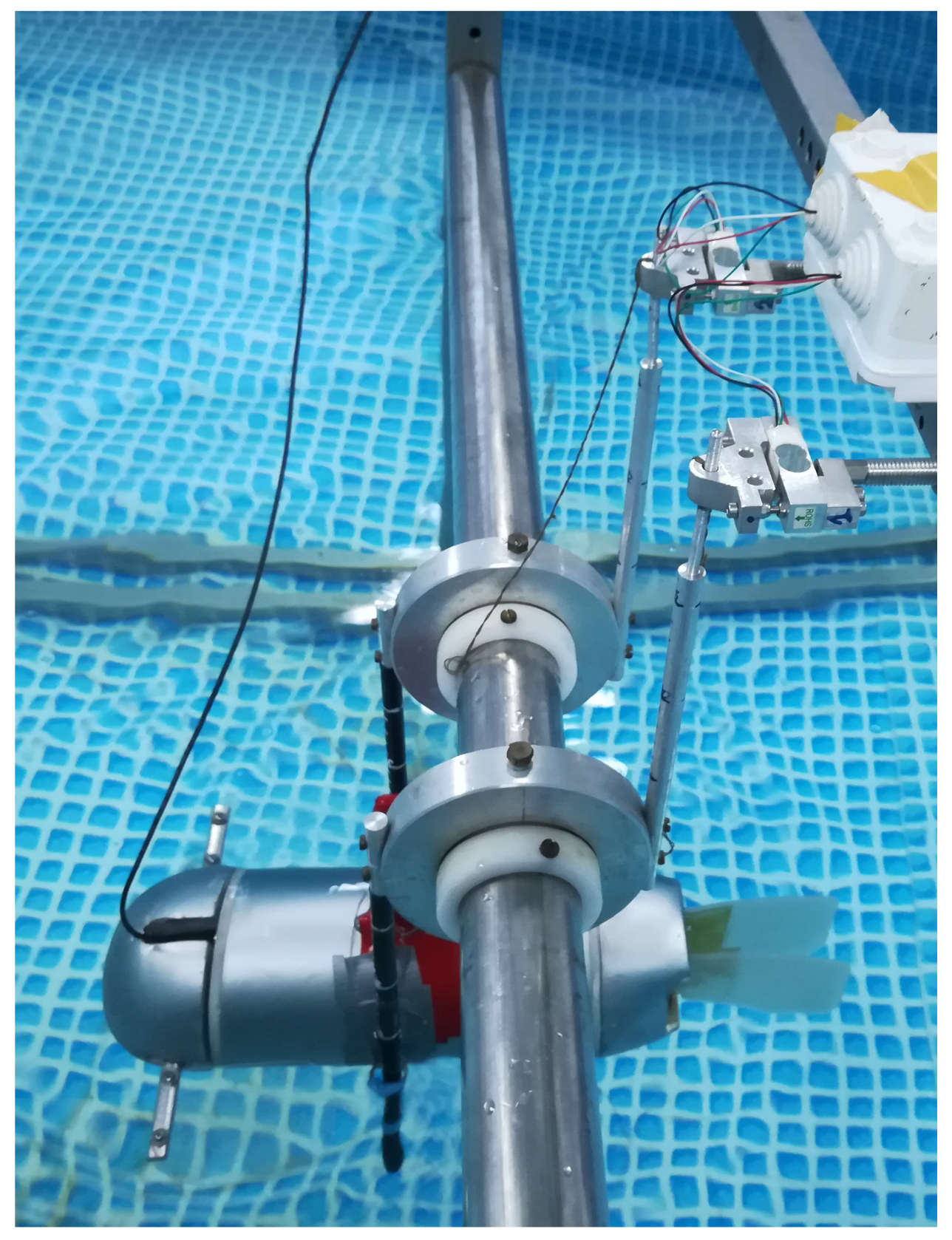
2.1.1. Mini CyberSeal
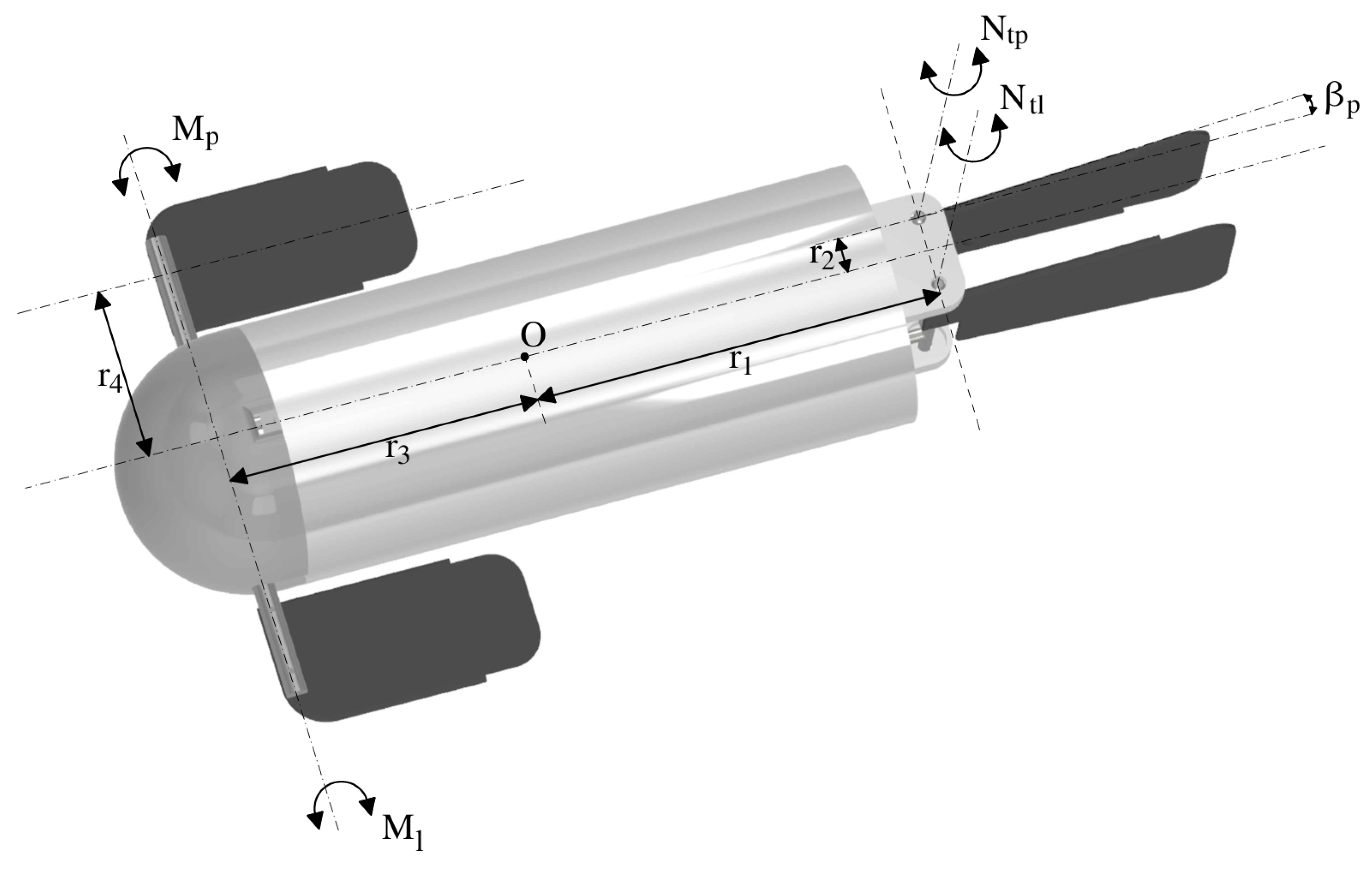
2.1.2. Mathematical Model
- (1)
- a stationary coordinate system associated with the Earth,
- (2)
- a moving coordinate system associated with the underwater vehicle.
- (1)
- —the longitudinal axis directed from the stern to the bow,
- (2)
- —transverse axis directed to the starboard side,
- (3)
- —vertical axis directed towards the bottom.
—vector of linear and angular velocities, i.e., ;
—vector of vehicle position and Euler angle coordinates in the stationary system;
—inertia matrix (equal to the sum of the rigid body mass matrix and the associated masses matrix );
—hydrodynamic damping matrix;
—matrix of restoring forces (gravity forces P and buoyancy forces B);
—vector of forces and moments acting on the vehicle.
X, Y, Z —forces acting on the vehicle in the longitudinal, transverse and vertical symmetry axis, respectively;
K, M, N—moments of forces acting in relation to the longitudinal, transverse, and vertical symmetry axis, respectively.
—constant thrust component at a specific fin oscillation frequency;
—variable component modelled by a sinusoidal wave with a specific amplitude (at a specific fin oscillation frequency).
2.2. Methods
2.2.1. Depth Controllers
is a control signal in k step of simulation;
is an error signal in k step of simulation;
is a change of error signals in k step of simulation, i.e., ;
, and are constant quantities called gain factors.
is a control signal in k step of simulation;
is a normalized control signal in k step of simulation;
is an error signal in k step of simulation;
is a change of error signal in k step of simulation, i.e., ;
, , is a constant settings of SM controller.
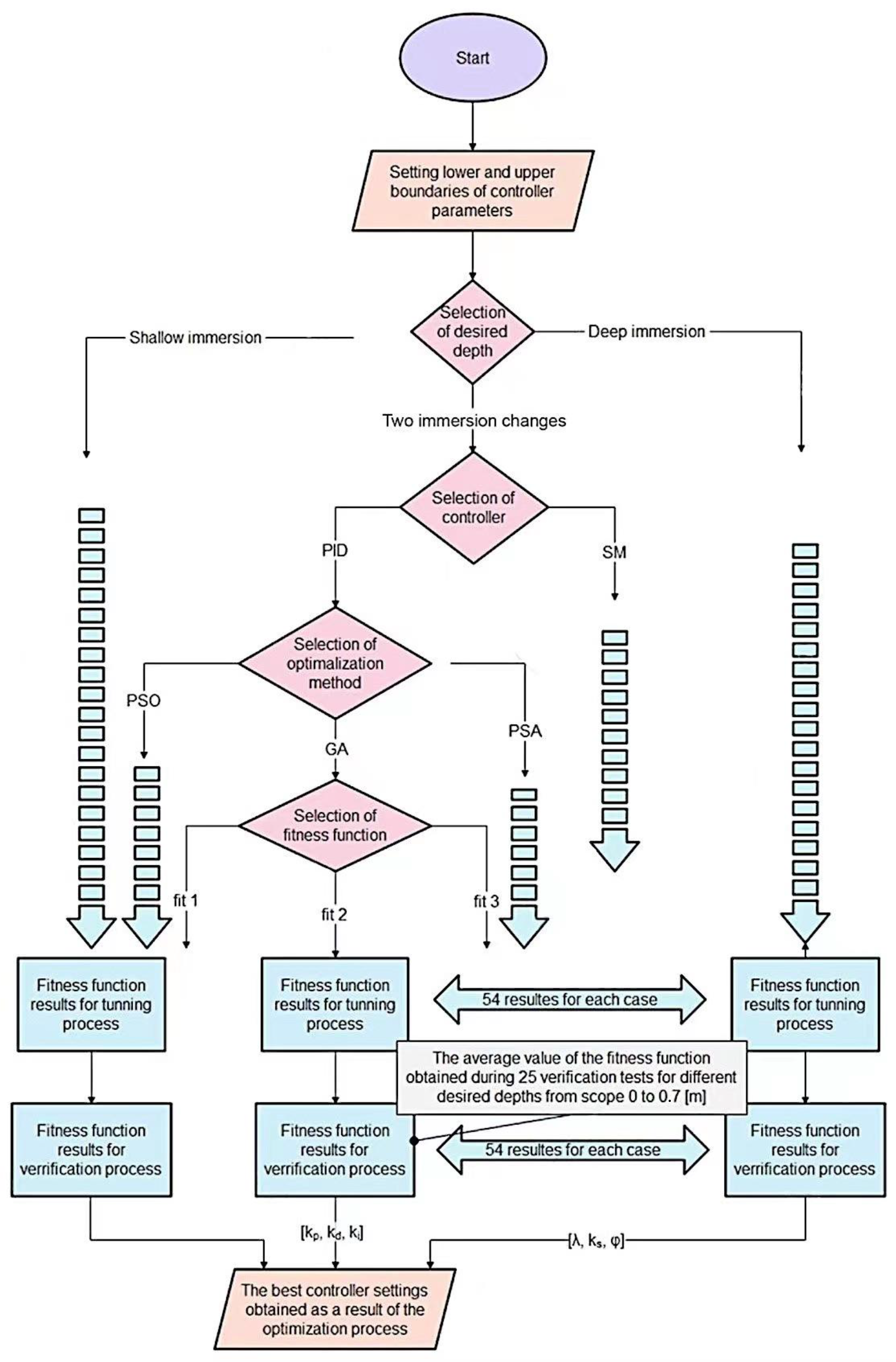
2.2.2. Optimization Methods
2.2.3. Fitness Function
3. Research Problem and Results
Results and Discussion
4. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AUV | Autonomous Underwater Vehicle |
| BUV | Biomimetic underwater vehicles |
| GA | Genetic algorithm |
| ISA | Integral Absolute Error |
| ISE | Integral of Squared Error |
| LMS | Least Median of Squares |
| PID | Proportional–integral–derivative controller |
| POM-C | Polyacetal (copolymer) |
| PSO | Particle Swarm Optimization |
| PSA | Pareto Simulation |
| ROV | Remote Operated Vehicle |
| SM | Sliding Mode controller |
References
- Ahmed, Y.; Yaakob, O.; Sun, B. Design of a new low cost ROV vehicle. J. Teknol. 2014, 69, 7. [Google Scholar] [CrossRef]
- Hożyń, S.; Żak, B. Stereo Vision System for Vision-Based Control of Inspection-Class ROVs. Remote Sens. 2021, 13, 5075. [Google Scholar] [CrossRef]
- Śmierzchalski, R.; Kapczyński, M. Autonomous Control of the Underwater Remotely Operated Vehicle in Collision Situation with Stationary Obstacle. Pol. Marit. Res. 2022, 29, 45–55. [Google Scholar] [CrossRef]
- Kot, R. Review of Collision Avoidance and Path Planning Algorithms Used in Autonomous Underwater Vehicles. Electronics 2022, 11, 2301. [Google Scholar] [CrossRef]
- Piskur, P. Strouhal Number Measurement for Novel Biomimetic Folding Fins Using an Image Processing Method. J. Mar. Sci. Eng. 2022, 10, 484. [Google Scholar] [CrossRef]
- Praczyk, T.; Szymak, P.; Naus, K.; Pietrukaniec, L.; Hożyń, S. Report on research with biomimetic autonomous underwater vehicle—Low-level control. Marit. Tech. J. 2018, 212, 105–123. [Google Scholar] [CrossRef]
- Shang, L.; Wang, S.; Tan, M.; Cheng, L. Swimming locomotion modelling for biomimetic underwater vehicle with two undulating long-fins. Robotica 2012, 30, 913–923. [Google Scholar] [CrossRef]
- Piskur, P.; Szymak, P.; Przybylski, M.; Naus, K.; Jaskólski, K.; Żokowski, M. Innovative Energy-Saving Propulsion System for Low-Speed Biomimetic Underwater Vehicles. Energies 2021, 34, 8418. [Google Scholar] [CrossRef]
- Hernández-Alvarado, R.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Gómez-Espinosa, A.; Fonseca-Navarro, F. Neural Network-Based Self-Tuning PID Control for Underwater Vehicles. Sensors 2016, 16, 1429. [Google Scholar] [CrossRef]
- Song, X.; Liu, F.; Zou, Z.; Zhu, Y.M.; Yin, J.; Xu, F. Nonlinear Underwater Robot Controller Design with Adaptive Disturbance Prediction and Smoother. Int. J. Comput. Intell. Syst. 2011, 4, 634–643. [Google Scholar] [CrossRef]
- Teran-Picon, J.C.; Camacho, A.J.O. Genetics algorithms as a tuning tool for PID and sliding mode controllers. Rev. Téc. Ing. Univ. Zulia 2005, 28, 200–209. [Google Scholar]
- Wu, B.; Li, S.; Wang, X. Discrete-Time Adaptive Sliding Mode Control of Autonomous Underwater Vehicle in the Dive Plane. In Intelligent Robotics and Applications; Springer: Heidelberg, Germany, 2009; pp. 157–164. [Google Scholar]
- Kang, B.; Lee, Y.; Piao, T.; Ding, Z.; Wang, W.D. Robotic soft swim bladder using liquid–vapor phase transition. Mater. Horizons 2021, 8, 939–947. [Google Scholar] [CrossRef]
- Chemori, A.; Kuusmik, K.; Salumäe, T.; Kruusmaa, M. Depth Control of the Biomimetic U-CAT Turtle-Like AUV with Experiments in Real Operating Conditions. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 4750–4755. [Google Scholar] [CrossRef]
- Morawski, M.; Talarczyk, T.; Malec, M. Depth control for biomimetic and hybrid unmanned underwater vehicles. Tech. Trans. 2021, 118. [Google Scholar] [CrossRef] [PubMed]
- Hożyń, S. An Automated System for Analysing Swim-Fins Efficiency. NašE More Znan. čAsopis More Pomor. 2020, 67 (Suppl. S3), 10–17. [Google Scholar] [CrossRef]
- Piskur, P.; Szymak, P.; Kitowski, Z.; Flis, L. Influence of fin’s material capabilities on the propulsion system of biomimetic underwater vehicle. Pol. Marit. Res. 2020, 4, 179–185. [Google Scholar] [CrossRef]
- Fossen, T. Handbook of Marine Craft Hydrodynamics and Motion Control; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Katzschmann, R.K.; DelPreto, J.; MacCurdy, R.; Rus, D. Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 2018, 3, eaar3449. [Google Scholar] [CrossRef]
- Szymak, P.; Przybylski, M. Thrust Measurement of Biomimetic Underwater Vehicle with Undulating Propulsion. Marit. Tech. J. 2018, 213, 69–82. [Google Scholar] [CrossRef]
- Przybylski, M. Mathematical Model of Biomimetic Underwater Vehicle. In Proceedings of the 33rd International ECMS Conference on Modelling and Simulation, Caserta, Italy, 11–14 June 2019; Volume 33, pp. 343–350. [Google Scholar] [CrossRef]
- Liang, J.; Huang, W.; Zhou, F.; Liang, J.; Lin, G.; Xiao, E.; Li, H.; Zhang, X. Double-Loop PID-Type Neural Network Sliding Mode Control of an Uncertain Autonomous Underwater Vehicle Model Based on a Nonlinear High-Order Observer with Unknown Disturbance. Mathematics 2022, 10, 3332. [Google Scholar] [CrossRef]
- Li, H.; He, B.; Yin, Q.; Mu, X.; Zhang, J.; Wan, J.; Wang, D.; Shen, Y. Fuzzy Optimized MFAC Based on ADRC in AUV Heading Control. Electronics 2019, 8, 608. [Google Scholar] [CrossRef]
- Szymak, P. Selection of Method for Underwater Robot Control. Machatronic Syst. Mater. Mechatron. Syst. Robot. 2010, 164, 149–154. [Google Scholar] [CrossRef]
- Vu, Q.V.; Dinh, T.A.; Nguyen, T.V.; Tran, H.V.; Le, H.X.; Pham, H.V.; Kim, T.D.; Nguyen, L. An Adaptive Hierarchical Sliding Mode Controller for Autonomous Underwater Vehicles. Electronics 2021, 10, 2316. [Google Scholar] [CrossRef]
- Global Optimization Toolbox.Solve Multiple Maxima, Multiple Minima, and Nonsmooth Optimization Problems. Available online: https://www.mathworks.com/products/global-optimization.html (accessed on 12 July 2022).
- Przybylski, M.; Szymak, P.; Kitowski, Z.; Piskur, P. Comparison of Different Course Controllers of Biomimetic Underwater Vehicle with Two Tail Fins. In Advanced, Contemporary Control; Springer: Berlin/Heidelberg, Germany, 2020; Volume 1196, pp. 1507–1518. [Google Scholar]
- Lim, C.-H.; Yoon, Y.-S.; Kim, J.-H. Genetic algorithm in mix proportioning of high-performance concrete. Cem. Concr. Res. 2004, 34, 409–420. [Google Scholar] [CrossRef]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization and Machine Learning; Addison Wesley: Boston, MA, USA, 1989. [Google Scholar]
- Jurczyk, K.; Piskur, P.; Szymak, P. Parameters Identification of the Flexible Fin Kinematics Model Using Vision and Genetic Algorithms. Pol. Marit. Res. 2020, 27, 39–47. [Google Scholar] [CrossRef]
- Venter, G.; Sobieszczanski-Sobieski, J. Particle Swarm Optimization. AIAA J. 2003, 41, 1583–1589. [Google Scholar] [CrossRef]
- Pedersen, M.E. Good Parameters for Particle Swarm Optimization. Hvass Lab. 2010, 1551–3203. Available online: https://www.semanticscholar.org/paper/Good-Parameters-for-Particle-Swarm-Optimization-Pedersen/a4ad7500b64d70a2ec84bf57cfc2fedfdf770433 (accessed on 13 March 2023).
- Praczyk, T. Hill-Climb-Assembler Encoding: Evolution of Small/Mid-Scale Artificial Neural Networks for Classification and Control Problems. Electronics 2022, 11, 2104. [Google Scholar] [CrossRef]
- Tušar, T.; Filipic, B. Visualization of Pareto Front Approximations in Evolutionary Multi-objective Optimization: A Critical Review and the Prosection Method. IEEE Trans. Evol. Comput. 2015, 19, 2. [Google Scholar] [CrossRef]
- Bogusz, K.; Rajkowski, B.; Domański, P. Porównanie różnych sposobów optymalizacji nastaw regulacji procesów przemysłowych z uwzględnieniem wpływu wskaźników oceny ich jakości. Pomiary Autom. Robot. 2019, 23, 27–39. [Google Scholar] [CrossRef]
- Pawliński, M.; Plamowski, S.; Domański, P. Wpływ wybranych wskaźników jakości regulacji na parametry sygnału sterującego w układzie z regulatorem PID. Pomiary Autom. Robot. 2019, 23, 31–42. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Degrees of Freedom | Name of Movement | Forces and Moments | Angular and Linear Velocities | Position and Euler Angles |
|---|---|---|---|---|
| 1 | Movement in the direction of the axis | X | u | x |
| 2 | Movement in the direction of the axis | Y | v | y |
| 3 | Movement toward the axis | Z | w | z |
| 4 | Rotation about the axis | K | p | |
| 5 | Rotation about the axis | M | q | |
| 6 | Rotation about the axis | N | r |
| Controller Type | Shallow (T) | Immersion (V) | Deep (T) | Immersion (V) | For Two (T) | Changes (V) |
|---|---|---|---|---|---|---|
| PID-GA | 30.5 | 48.6 | 73.3 | 55.5 | 128.6 | 54.2 |
| SM-GA | 29.2 | 88 | 71.3 | 54.3 | 126.2 | 96.2 |
| PID-PSO | 29.8 | 67.4 | 75.4 | 57.2 | 124.6 | 94.2 |
| SM-PSO | 30.1 | 92.1 | 65.6 | 55.2 | 116.5 | 95.1 |
| PID-PSA | 33.7 | 77,2 | 72.8 | 58.5 | 126.8 | 108.2 |
| SM-PSA | 32.1 | 116.1 | 67.6 | 96.8 | 120.1 | 99.7 |
| Controller Type | Shallow (T) | Immersion (V) | Deep (T) | Immersion (V) | For Two (T) | Changes (V) |
|---|---|---|---|---|---|---|
| PID-GA | 11 | 36.4 | 84.2 | 53.2 | 141.8 | 30.8 |
| SM-GA | 11.2 | 75.1 | 85.6 | 81.2 | 167.8 | 80.1 |
| PID-PSO | 10.8 | 70.5 | 78.9 | 88.8 | 138.9 | 241.2 |
| SM-PSO | 11.4 | 165 | 72.2 | 78.2 | 129.8 | 77.2 |
| PID-PSA | 11.21 | 140.3 | 83.8 | 242 | 139.2 | 65.2 |
| SM-PSA | 11.2 | 199.8 | 76.8 | 358 | 134.4 | 92.6 |
| Controller Type | Shallow (T) | Immersion (V) | Deep (T) | Immersion (V) | For Two (T) | Changes (V) |
|---|---|---|---|---|---|---|
| PID-GA | 8.21 | 14.1 | 9.26 | 15.9 | 20.1 | 9.11 |
| SM-GA | 8.9 | 22.41 | 14.76 | 24.2 | 26.2 | 15.6 |
| PID-PSO | 8.08 | 23.2 | 9.34 | 14.5 | 18.9 | 9.74 |
| SM-PSO | 9.01 | 24.6 | 11.45 | 24.31 | 27.6 | 30.41 |
| PID-PSA | 8.41 | 28.3 | 9.98 | 14.8 | 19 | 9.41 |
| SM-PSA | 9.5 | 25.5 | 12.32 | 15.81 | 31.2 | 15.81 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Przybylski, M. Selection of the Depth Controller for the Biomimetic Underwater Vehicle. Electronics 2023, 12, 1469. https://doi.org/10.3390/electronics12061469
Przybylski M. Selection of the Depth Controller for the Biomimetic Underwater Vehicle. Electronics. 2023; 12(6):1469. https://doi.org/10.3390/electronics12061469
Chicago/Turabian StylePrzybylski, Michał. 2023. "Selection of the Depth Controller for the Biomimetic Underwater Vehicle" Electronics 12, no. 6: 1469. https://doi.org/10.3390/electronics12061469
APA StylePrzybylski, M. (2023). Selection of the Depth Controller for the Biomimetic Underwater Vehicle. Electronics, 12(6), 1469. https://doi.org/10.3390/electronics12061469