
A New Hybrid Fault Diagnosis Method for Wind Energy Converters

Abstract
1. Introduction
1.1. Background
1.2. A Survey of Previous Related Work
1.3. Motivation
- The multi-scale analysis tool MEMD is used to extract the common modes matching the timescale. It studies the multi-scale relationship between three-phase voltages, realizes the synchronous analysis of three-phase voltages, and ensures that the number and frequency of the extract modes match and align;
- IMFs-FE reflects the complexity of intrinsic oscillations, increasing the robustness to operating conditions and noise;
- The best, average, and worst results, and the standard deviations are reported to prove the robust and stable performance;
- The hybrid method shows outstanding performance in terms of high diagnosis accuracy, strong robustness, and high computational efficiency.
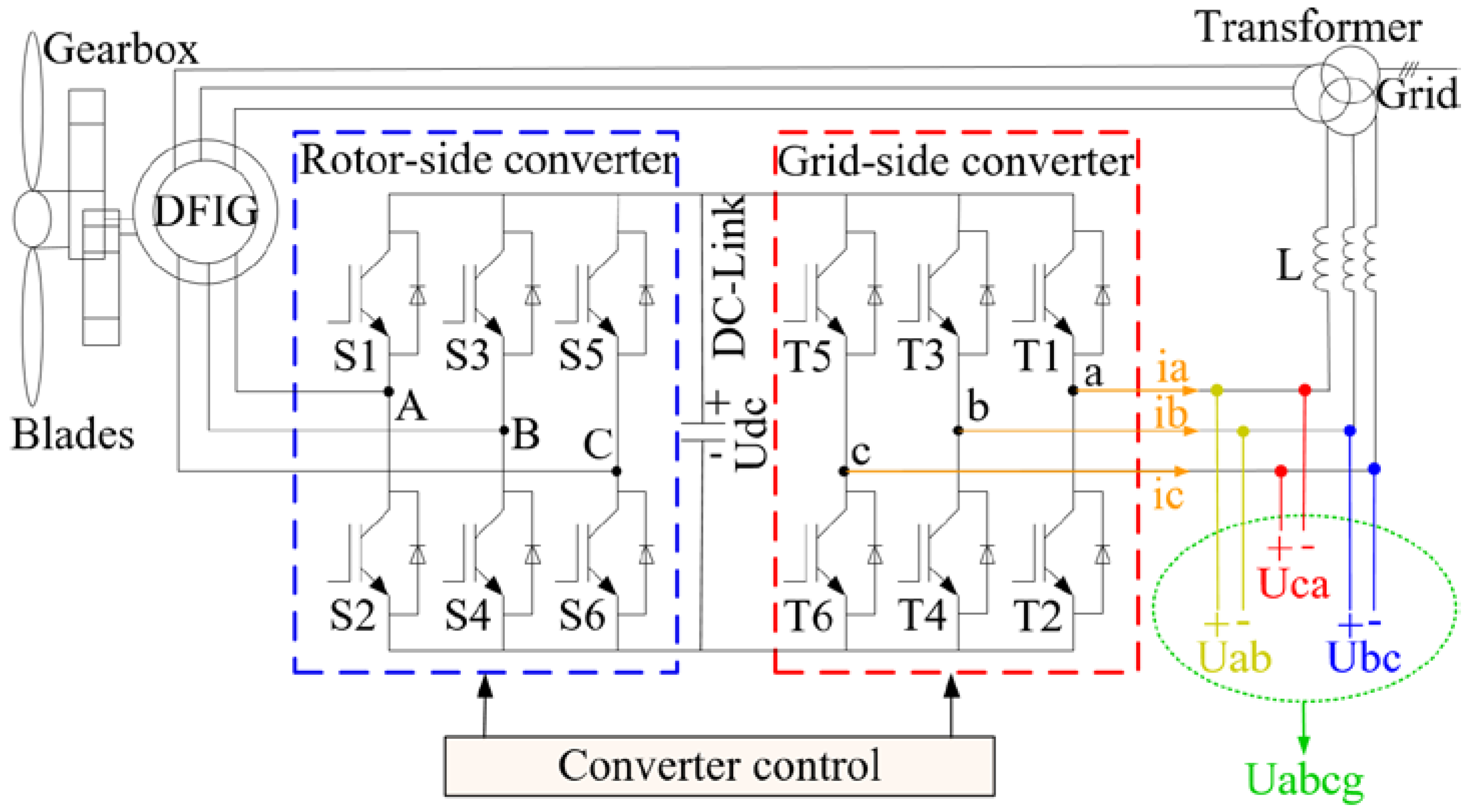
2. Fault Diagnosis System
2.1. System Description
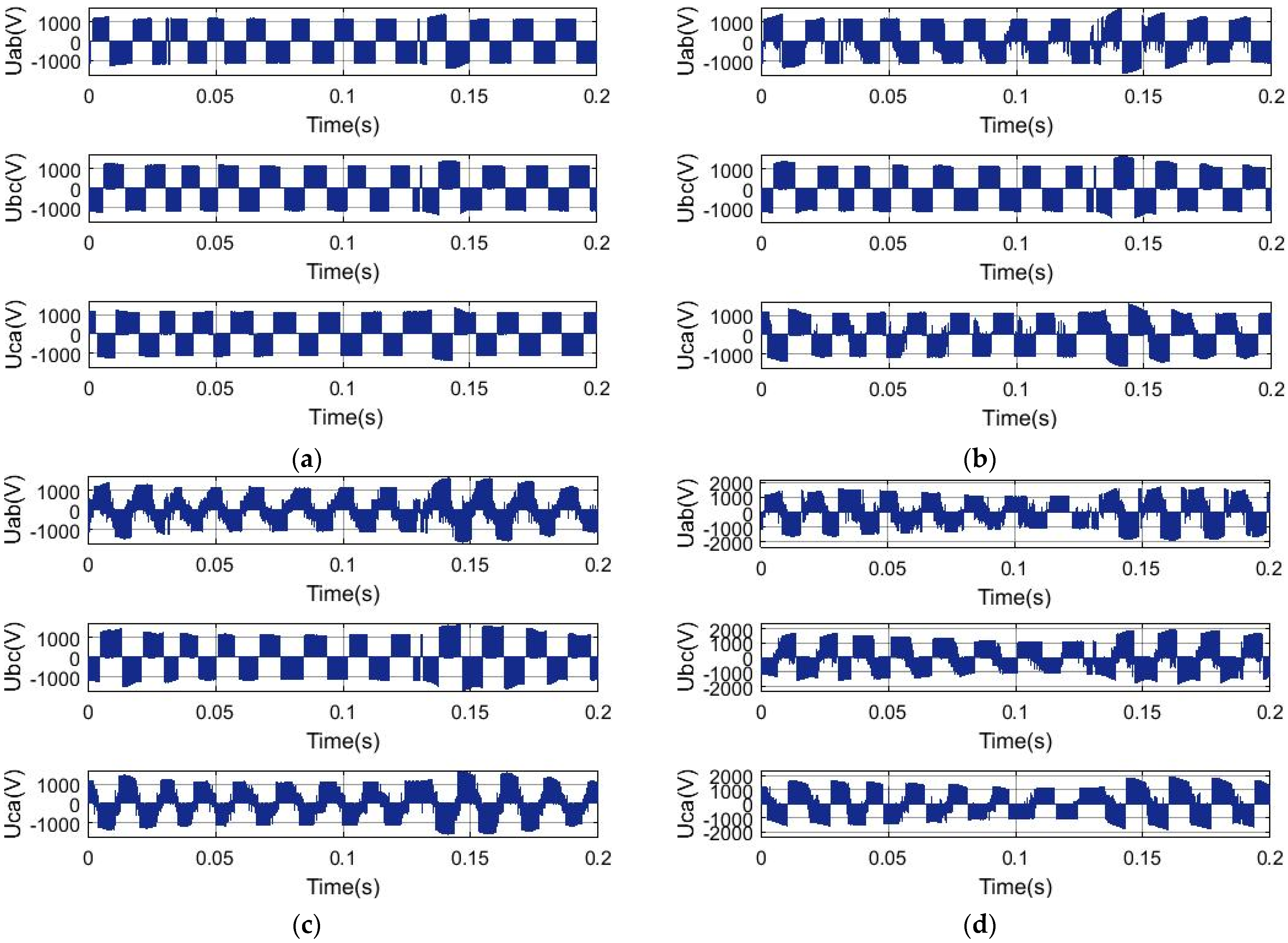
2.2. Fault Types
3. Fault Diagnosis Method
3.1. The Proposed Fault Diagnosis Method
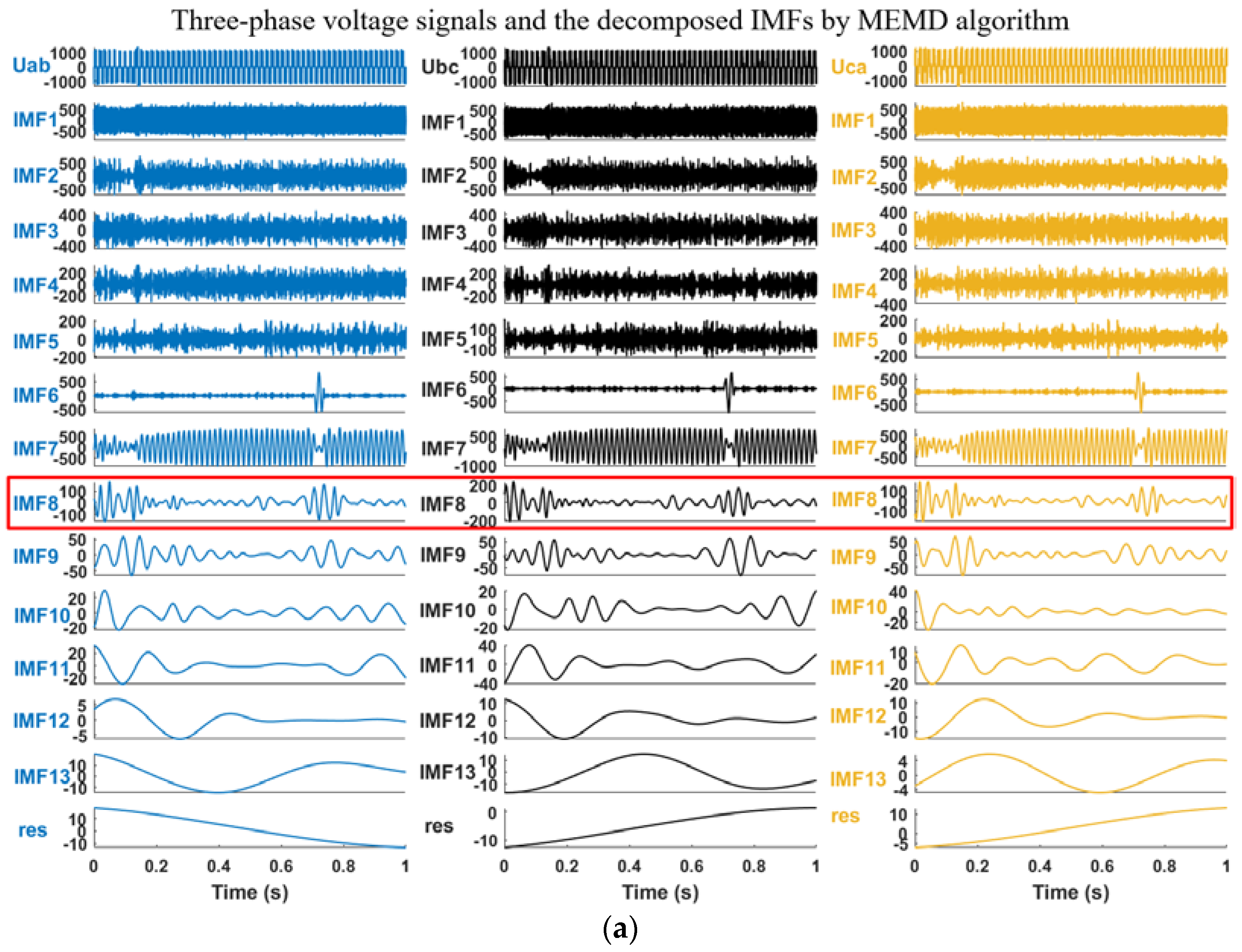
3.2. Signal Decomposition Using MEMD
3.3. Feature Extraction Using FE
3.4. Fault Classification Diagnosis Using AFSA-SVM
4. Simulation Results and Discussion
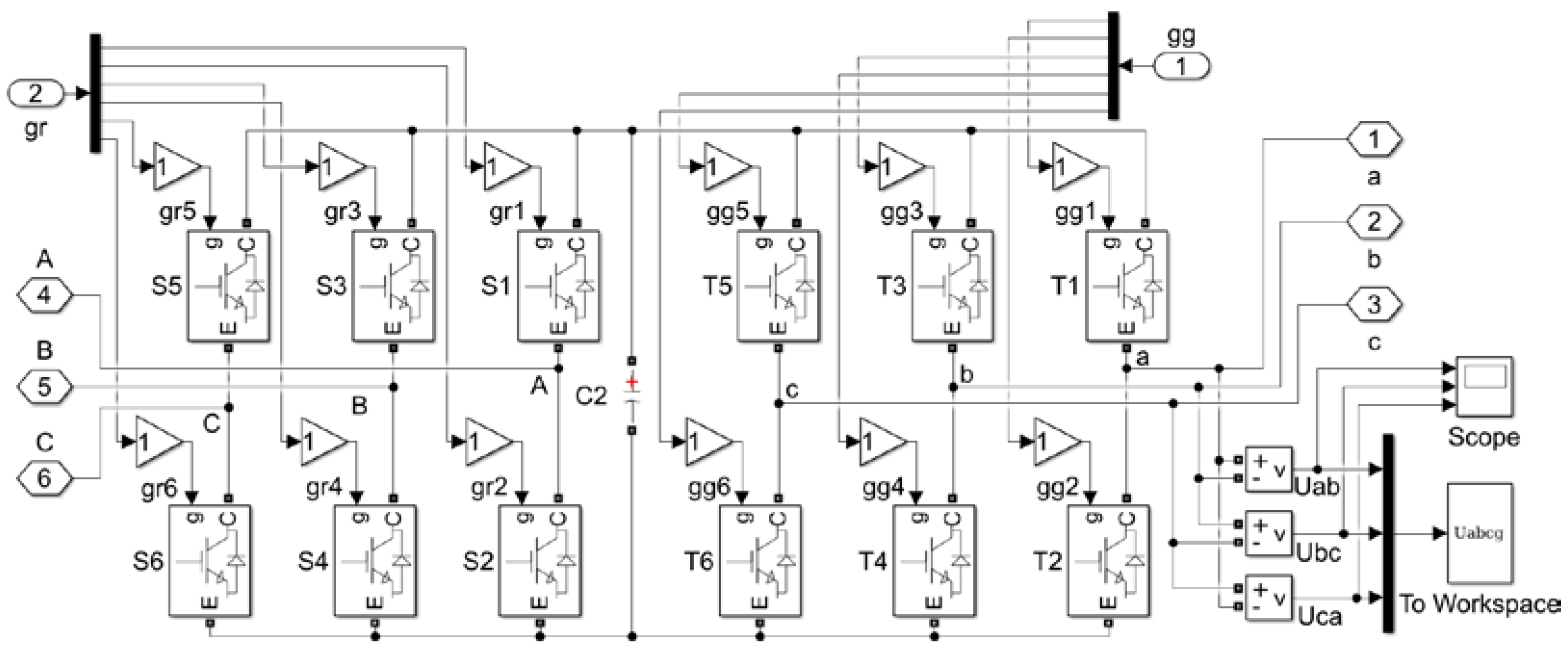
4.1. Simulation Platform
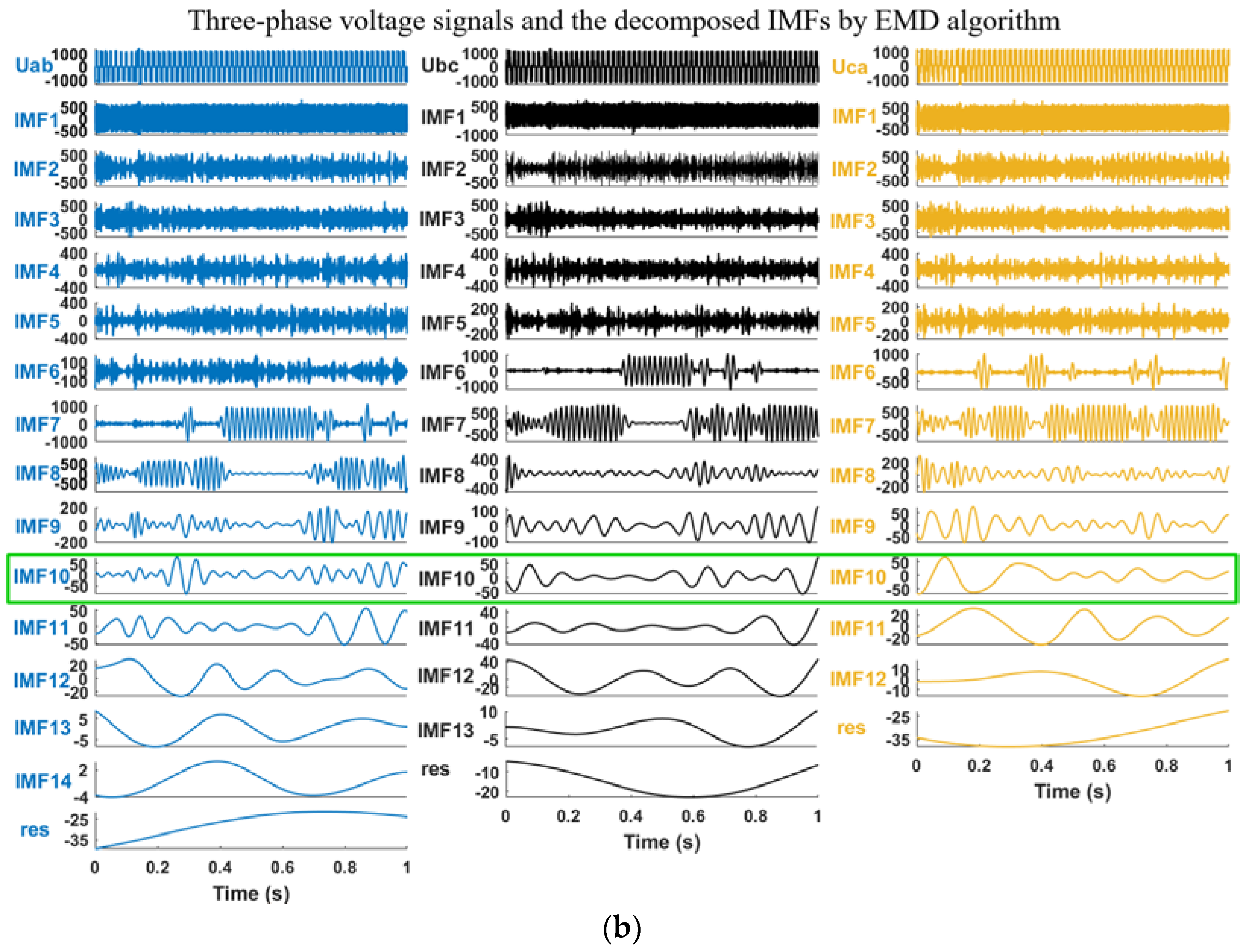
4.2. Results of Decomposition
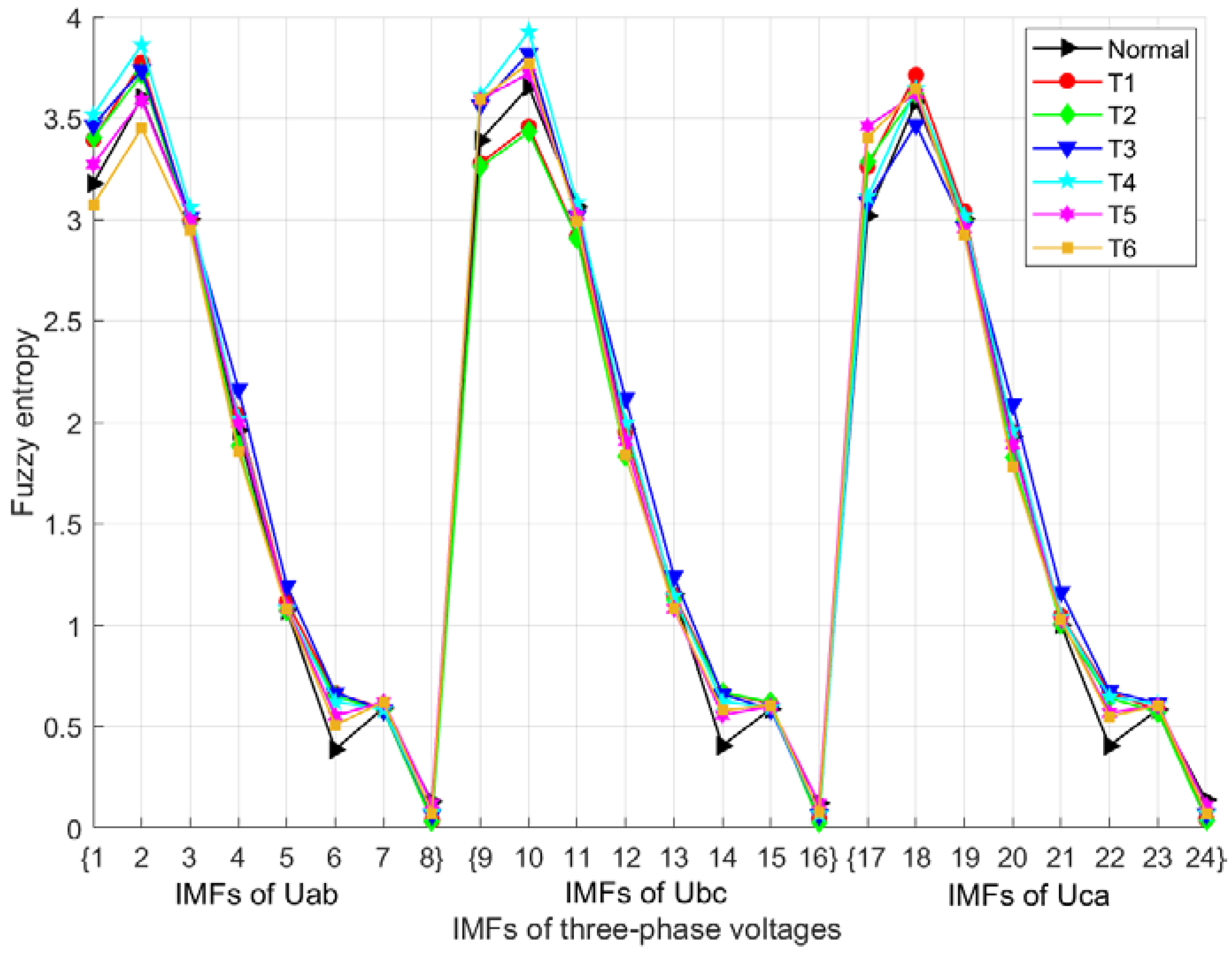
4.3. Results of Feature Extraction
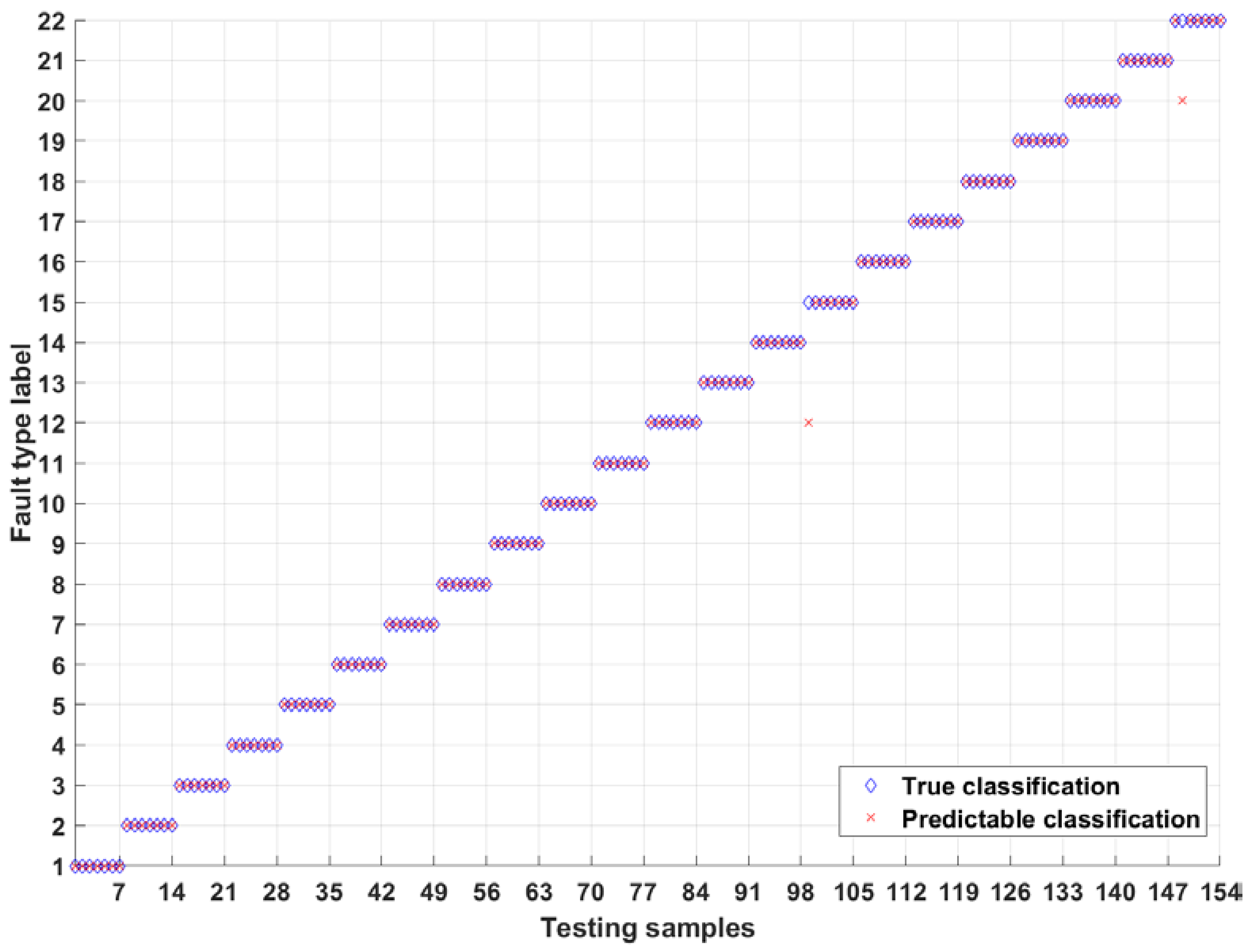
4.4. Results of Classification
4.5. Comparison of Different Methods
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Papadopoulos, P.; Coit, D.W.; Ezzat, A.A. Seizing Opportunity: Maintenance Optimization in Offshore Wind Farms Considering Accessibility, Production, and Crew Dispatch. IEEE Trans. Sustain. Energy 2022, 13, 111. [Google Scholar] [CrossRef]
- Saidi, L.; Benbouzid, M. Prognostics and Health Management of Renewable Energy Systems: State of the Art Review, Challenges, and Trends. Electronics 2021, 10, 2732. [Google Scholar] [CrossRef]
- Guo, Y.; Sheng, S.; Phillips, C.; Keller, J.; Veers, P.; Williams, L. A methodology for reliability assessment and prognosis of bearing axial cracking in wind turbine gearboxes. Renew. Sustain. Energy Rev. 2020, 127, 109888. [Google Scholar] [CrossRef]
- Nie, X.; Liu, S.; Xie, G. A Novel Autoencoder with Dynamic Feature Enhanced Factor for Fault Diagnosis of Wind Turbine. Electronics 2020, 9, 600. [Google Scholar] [CrossRef]
- Li, S.; Cao, B.; Li, J.; Cui, Y.; Kang, Y.; Wu, G. Review of condition monitoring and defect inspection methods for composited cable terminals. High Volt. 2023. [Google Scholar] [CrossRef]
- Artigao, E.; Martínez, S.; Escribano, A.; Lázaro, E. Wind turbine reliability: A comprehensive review towards effective condition monitoring development. Appl. Energy 2018, 228, 1569. [Google Scholar] [CrossRef]
- Liang, J.; Zhang, K.; Durra, A.A.; Muyeen, S.M.; Zhou, D. A state-of-the-art review on wind power converter fault diagnosis. Energy Rep. 2022, 8, 5341. [Google Scholar] [CrossRef]
- Guang, X.; Wang, Z.; Li, L.; Su, Q. Robust fault diagnosis for closed-loop grid-connected inverter based on sliding mode observer and identifier. Electr. Power Syst. Res. 2023, 217, 109097. [Google Scholar]
- Jia, H.; Deng, Y.; Hu, X.; Deng, Z.; He, X. A Concurrent Diagnosis Method of IGBT Open-Circuit Faults in Modular Multilevel Converters. IEEE J. Emerg. Sel. Top. Power Electron. 2023. [Google Scholar] [CrossRef]
- Zhao, H.; Cheng, L. Open-circuit faults diagnosis in back-to-back converters of DF wind turbine. IET Renew. Power Gener. 2017, 11, 417. [Google Scholar] [CrossRef]
- Qiu, Y.; Jiang, H.; Feng, Y.; Cao, M.; Zhao, Y.; Li, D. A new fault diagnosis algorithm for PMSG wind turbine power converters under variable wind speed conditions. Energies 2016, 9, 548. [Google Scholar] [CrossRef]
- Wang, T.; Xu, H.; Han, J.; Elbouchikhi, E.; Benbouzid, M.E. Cascaded H-bridge multilevel inverter system fault diagnosis using a PCA and multiclass relevance vector machine approach. IEEE Trans. Power Electron. 2015, 30, 7006. [Google Scholar] [CrossRef]
- Wang, T.; Qi, J.; Xu, H.; Wang, Y.; Liu, L.; Gao, D. Fault diagnosis method based on FFT-RPCA-SVM for cascaded-multilevel inverter. ISA Trans. 2016, 60, 156. [Google Scholar] [CrossRef] [PubMed]
- Cai, B.; Zhao, Y.; Liu, H.; Xie, M. A data-driven fault diagnosis methodology in three-phase inverters for PMSM drive systems. IEEE Trans. Power Electron. 2017, 32, 5590. [Google Scholar] [CrossRef]
- Wu, F.; Hao, Y.; Zhao, J.; Liu, Y. Current similarity based open-circuit fault diagnosis for induction motor drives with discrete wavelet transform. Microelectron. Reliab. 2017, 75, 309. [Google Scholar] [CrossRef]
- Dhumale, R.B.; Lokhande, S.D. Neural network fault diagnosis of voltage source inverter under variable load conditions at different frequencies. Measurement 2016, 91, 565. [Google Scholar] [CrossRef]
- Liu, Y.; Chai, Y.; Wei, S.; Luo, Z. Circuit Fault diagnostic method of Wind Power Converter with Wavelet-DBN. Chin. Intell. Syst. Conf. CISC 2017, 460, 623. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. London. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Beibei, M.; Shen, Y.; Wu, D.; Zhao, Z. Three level inverter fault diagnosis using EMD and support vector machine approach. In Proceedings of the 12th IEEE Conference on Industrial Electronics and Applications (ICIEA), Siem Reap, Cambodia, 18–20 June 2017. [Google Scholar]
- Liang, J.; Zhang, K.; Durra, A.A.; Zhou, D. A novel fault diagnostic method in power converters for wind power generation system. Appl. Energy 2020, 266, 114851. [Google Scholar] [CrossRef]
- Cherif, B.; Bendiabdellah, A.; Tabbakh, M. An Automatic Diagnosis of an Inverter IGBT Open-Circuit Fault Based on HHT-ANN. Electr. Power Compon. Syst. 2020, 48, 589. [Google Scholar] [CrossRef]
- Yan, X.; Liu, Y.; Xu, Y.; Jia, M. Multichannel fault diagnosis of wind turbine driving system using multivariate singular spectrum decomposition and improved Kolmogorov complexity. Renew. Energy 2021, 170, 724–748. [Google Scholar] [CrossRef]
- Yang, Y.; Zhu, W. Research Based on Improved CNN-SVM Fault Diagnosis of V2G Charging Pile. Electronics 2023, 12, 655. [Google Scholar] [CrossRef]
- Liu, Z.; Li, M.; Zhu, Z.; Xiao, L.; Nie, C.; Tang, Z. Health State Identification Method of Nuclear Power Main Circulating Pump Based on EEMD and OQGA-SVM. Electronics 2023, 12, 410. [Google Scholar] [CrossRef]
- Ke, L.; Liu, Z.; Zhang, Y. Fault Diagnosis of Modular Multilevel Converter Based on Optimized Support Vector Machine. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–30 July 2020; pp. 4204–4209. [Google Scholar]
- Cai, X.; Wai, R.J. Intelligent DC Arc-Fault Detection of Solar PV Power Generation System via Optimized VMD-Based Signal Processing and PSO–SVM Classifier. IEEE J. Photovolt. 2022, 12, 1058. [Google Scholar] [CrossRef]
- Shakya, S. Performance Analysis of Wind Turbine Monitoring Mechanism Using Integrated Classification and Optimization Techniques. J. Artif. Intell. Capsul. Netw. 2020, 2, 31. [Google Scholar] [CrossRef]
- Chen, W.; Bazzi, A. Logic-based methods for intelligent fault diagnosis and recovery in power electronics. IEEE Trans. Power Electron. 2017, 32, 5573. [Google Scholar] [CrossRef]
- Tan, Y.; Zhang, H.; Zhou, Y. Fault Detection Method for Permanent Magnet Synchronous Generator Wind Energy Converters Using Correlation Features Among Three-phase Currents. J. Mod. Power Syst. Clean Energy 2020, 8, 168. [Google Scholar] [CrossRef]
- Gao, Y.; Wang, L.; Zhang, Y.; Yin, Z. Research on AC Arc Fault Characteristics Based on the Difference between Adjacent Current Cycle. In Proceedings of the Prognostics and System Health Management Conference (PHM-Qingdao), Qingdao, China, 25–27 October 2019. [Google Scholar]
- Yuan, Y.; Chai, Y.; Qu, J.; Yang, Z.; Xu, S. Circuit fault diagnostic method of wind power converter with VMD-SVM. In Proceedings of the 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016. [Google Scholar]
- Baghli, M.; Delpha, C.; Diallo, D.; Hallouche, A.; Mba, D.; Wang, T. Three-level NPC inverter incipient fault detection and classification using output current statistical analysis. Energies 2019, 12, 1372. [Google Scholar] [CrossRef]
- Rehman, N.; Mandic, D.P. Multivariate empirical mode decomposition. Proc. R. Soc. A 2010, 466, 1291. [Google Scholar] [CrossRef]
- Rilling, G.; Flandrin, P.; Goncalves, P. On empirical mode decomposition and its algorithms. IEEE-EURASIP Workshop Nonlinear Signal Image Process. 2003, 3, 8–11. [Google Scholar]
- Chen, W.; Wang, Z.; Xie, H.; Yu, W. Characterization of surface EMG signal based on fuzzy entropy. IEEE Trans. Neural. Syst. Rehabil. Eng. 2007, 15, 266. [Google Scholar] [CrossRef] [PubMed]
- Vapnik, V.N. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 1995. [Google Scholar]
- Liu, W.; Shen, J.; Yang, X. Rolling bearing fault detection approach based on improved dispersion entropy and AFSA optimized SVM. Int. J. Electr. Eng. Educ. 2020, 15, 1. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Approach | Method | Advantage | Drawback |
|---|---|---|---|---|
| [8,9] | Sliding mode observer [8]; Kalman filter estimation method [9] | Model-based | 1. Observe the essential fault characteristics of the system; 2. Make full use of system information; 3. Conducive to finding early-stage weak faults. | Heavily depends on the accuracy of system parameters and models |
| [10,11] | Absolute normalized current [10]; Current trajectory [11] | Signal-based | 1. Simple and straightforward; 2. Significant real-time performance | 1. Requires prior-knowledge of the system; 2. Susceptible to threshold; 3. Sensitive to noise and operating conditions. |
| [12,13,14,15,16,17] | FFT-PCA-RVM [12]; FFT-RPCA-SVM [13]; FFT-PCA- BNs [14]; WT-energy vectors [15]; DWT-detail coefficients-ANN [16]; WT-energy vectors-DBN [17] | Data-driven | 1. Does not need accurate model; 2. Does not need system prior knowledge. | 1. FFT generates error information for nonlinear signals; 2. FFT has no time resolution; 3. DWT is easily affected by wavelet bases and lacks adaptability; 4. Detail coefficients, energy vectors, and principal component energy are sensitive to load, the changing operating conditions, and noise; 5. ANN: needs a large number of samples, heavily relies on learning samples, easy to fall into local optimum; 6. DBN: Heavy complexity and calculation. |
| [19,20,21] | EMD-PCA-SVM [19]; EEMD-NE-SVM [20]; CEEMD-ANN [21] | Data-driven | 1. Nonlinear signal processing; 2. Adaptive signal processing; 3. SVM: suitable for a small number of samples, simple/straightforward, high generalization ability, with global optimality. | 1. Have limitations in processing multi-channel signals; 2. ANN: needs a large number of samples, heavily relies on learning samples, easy to fall into local optimum; 3. SVM: difficulty in selecting the penalty factor and radial basis kernel parameter in SVM model. |
| [20,25,26,27] | CV-SVM [20]; GA-SVM [25]; PSO-SVM [26]; CS-SVM [27] | Data-driven | Improve the diagnostic accuracy | Increase the calculation cost |
| Quantity | Value | Quantity | Value |
|---|---|---|---|
| Nominal power | 1.5 MW | Resistance of rotor | 0.016 pu |
| Nominal voltage | 575 V | Leak inductance of rotor | 0.16 pu |
| Resistance of stator | 0.023 pu | Pole pairs number | 3 |
| Leak inductance of stator | 0.18 pu | Magnetizing inductance | 2.9 pu |
| Mode | Uab | Ubc | Uca |
|---|---|---|---|
| IMFs 1 | 2.14 | 2.14 | 2.14 |
| IMFs 2 | 3.87 | 3.87 | 3.87 |
| IMFs 3 | 9.08 | 6.02 | 9.08 |
| IMFs 4 | 11.61 | 13.49 | 11.61 |
| IMFs 5 | 19.96 | 19.96 | 19.96 |
| IMFs 6 | 54.95 | 38.31 | 38.31 |
| IMFs 7 | 82.65 | 82.65 | 82.65 |
| IMFs 8 | 277.80 | 277.80 | 277.80 |
| IMFs 9 | 526.36 | 588.29 | 588.29 |
| IMFs 10 | 909.18 | 909.18 | 909.18 |
| IMFs 11 | 2000.20 | 2000.20 | 2000.20 |
| IMFs 12 | 3333.66 | 3333.66 | 3333.66 |
| IMFs 13 | 5000.50 | 5000.50 | 5000.50 |
| res | 5000.50 | >T | 5000.50 |
| Mode | Uab | Ubc | Uca |
|---|---|---|---|
| IMFs 1 | 2.14 | 2.14 | 2.14 |
| IMFs 2 | 5.61 | 4.67 | 6.02 |
| IMFs 3 | 9.08 | 6.02 | 9.08 |
| IMFs 4 | 13.49 | 13.49 | 13.49 |
| IMFs 5 | 19.96 | 19.96 | 19.96 |
| IMFs 6 | 19.96 | 49.75 | 41.49 |
| IMFs 7 | 82.65 | 82.65 | 163.95 |
| IMFs 8 | 163.95 | 322.61 | 344.86 |
| IMFs 9 | 312.53 | 500.05 | 625.06 |
| IMFs 10 | 500.05 | 833.41 | 1666.83 |
| IMFs 11 | 1111.22 | 2000.20 | 2500.25 |
| IMFs 12 | 2000.20 | 2500.25 | 3333.66 |
| IMFs 13 | 3333.66 | 3333.66 | >T |
| IMFs 14 | 3333.66 | >T | - |
| res | >T | - | - |
| Noise Level | Different Methods | Accuracy (%) | |||
|---|---|---|---|---|---|
| Maximum | Minimum | Average | Standard Deviation | ||
| 30 dB | MEMD-FE | 99.7532 | 91.3117 | 95.5758 | 1.9344 |
| EMD-FE | 84.1688 | 79.6234 | 82.0260 | 3.4044 | |
| MEMD-SE | 99.1039 | 91.9610 | 95.2727 | 2.3996 | |
| 20 dB | MEMD-FE | 93.6250 | 89.6477 | 92.1477 | 1.3312 |
| EMD-FE | 76.3766 | 60.1429 | 69.8182 | 4.6368 | |
| MEMD-SE | 92.5065 | 86.7662 | 90.4286 | 2.8846 | |
| 10 dB | MEMD-FE | 86.1169 | 82.2727 | 84.2338 | 1.7167 |
| EMD-FE | 65.9870 | 58.1948 | 63.0000 | 3.1679 | |
| MEMD-SE | 80.4148 | 73.3125 | 76.3807 | 2.5971 | |
| Noise Level | Different Methods | Accuracy (%) | Time (s) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Maximum | Minimum | Average | Standard Deviation | Maximum | Minimum | Average | Standard Deviation | ||
| 30 dB | AFSA-SVM | 99.7532 | 91.3117 | 95.5758 | 1.9344 | 515.9140 | 437.5331 | 484.7235 | 19.5119 |
| CS-SVM | 93.2597 | 77.6753 | 85.4675 | 7.3005 | 1.2609 × 10³ | 439.8244 | 811.4330 | 337.8004 | |
| GA-SVM | 95.1875 | 86.5227 | 91.9631 | 2.4902 | 1.2842 × 10³ | 1.0122 × 10³ | 1.1841 × 10³ | 91.7936 | |
| PSO-SVM | 94.1558 | 81.1688 | 90.3896 | 5.2833 | 2.1020 × 10³ | 1.9771 × 10³ | 2.0466 × 10³ | 44.6337 | |
| CV-SVM | 95.0519 | 88.9610 | 92.0130 | 2.8886 | 224.5880 | 214.4492 | 223.4154 | 3.1523 | |
| 20 dB | AFSA-SVM | 93.6250 | 89.6477 | 92.1477 | 1.3312 | 573.9010 | 496.1134 | 536.6309 | 25.9141 |
| CS-SVM | 88.6104 | 69.4805 | 82.3896 | 7.9602 | 924.5070 | 597.9579 | 736.4997 | 168.8008 | |
| GA-SVM | 90.8571 | 83.0130 | 87.0433 | 2.9281 | 1.1761 × 10³ | 1.1144 × 10³ | 1.1422 × 10³ | 31.2674 | |
| PSO-SVM | 89.4545 | 79.0649 | 86.9091 | 5.3152 | 2.7518 × 10³ | 2.6897 × 10³ | 2.7298 × 10³ | 34.8368 | |
| CV-SVM | 90.5864 | 82.4156 | 88.8571 | 3.0546 | 420.1174 | 410.2499 | 416.5160 | 2.8462 | |
| 10 dB | AFSA-SVM | 86.1169 | 82.2727 | 84.2338 | 1.7167 | 821.9604 | 727.2384 | 771.6015 | 29.3344 |
| CS-SVM | 82.7143 | 65.3247 | 76.7370 | 7.2453 | 2.0202 × 10³ | 1.1984 × 10³ | 1.5256 × 10³ | 299.4243 | |
| GA-SVM | 82.7662 | 76.2208 | 80.3853 | 2.5804 | 1.8279 × 10³ | 1.6829 × 10³ | 1.7595 × 10³ | 72.8349 | |
| PSO-SVM | 83.4156 | 72.0779 | 79.7078 | 5.7196 | 3.7101 × 10³ | 3.6438 × 10³ | 3.6783 × 10³ | 30.0669 | |
| CV-SVM | 83.1169 | 72.0779 | 78.0519 | 3.5672 | 313.5173 | 311.3903 | 311.8531 | 0.6606 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, J.; Zhang, K. A New Hybrid Fault Diagnosis Method for Wind Energy Converters. Electronics 2023, 12, 1263. https://doi.org/10.3390/electronics12051263
Liang J, Zhang K. A New Hybrid Fault Diagnosis Method for Wind Energy Converters. Electronics. 2023; 12(5):1263. https://doi.org/10.3390/electronics12051263
Chicago/Turabian StyleLiang, Jinping, and Ke Zhang. 2023. "A New Hybrid Fault Diagnosis Method for Wind Energy Converters" Electronics 12, no. 5: 1263. https://doi.org/10.3390/electronics12051263
APA StyleLiang, J., & Zhang, K. (2023). A New Hybrid Fault Diagnosis Method for Wind Energy Converters. Electronics, 12(5), 1263. https://doi.org/10.3390/electronics12051263