
FIImap: Fast Incremental Inflate Mapping for Autonomous MAV Navigation



Abstract
1. Introduction
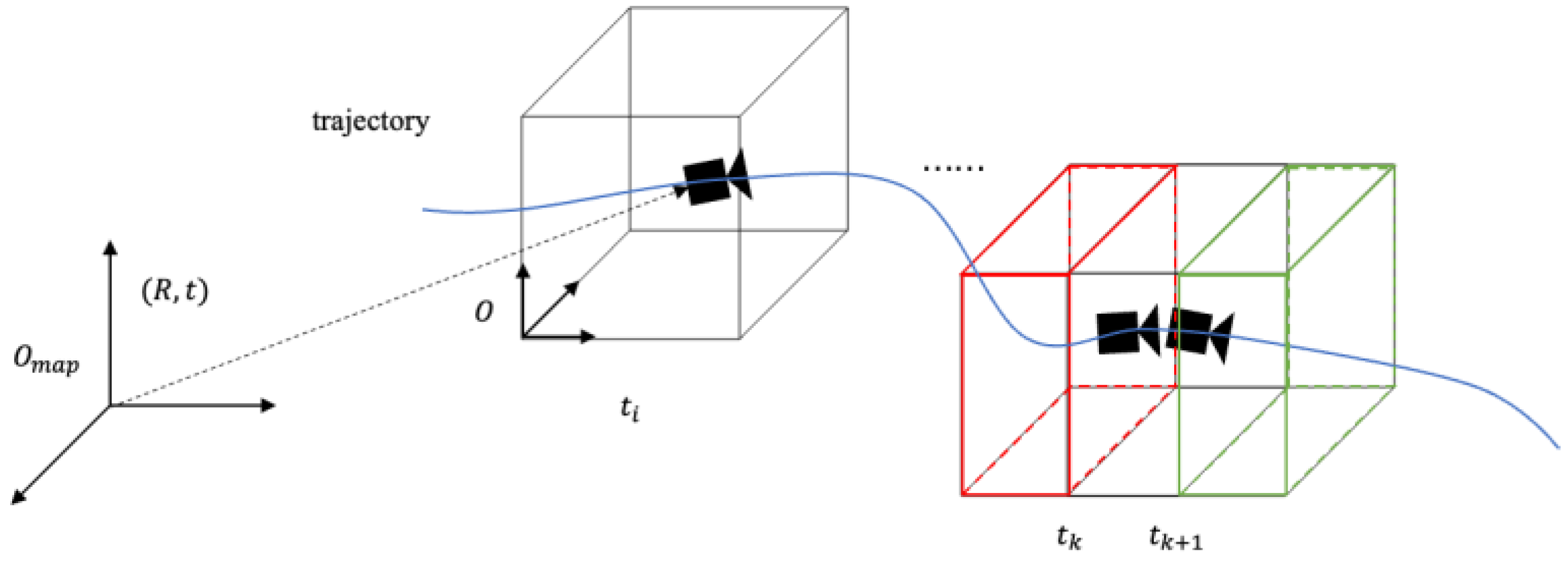
- In Euclidean space, a sliding occupancy map model is designed to support flight without map boundaries.
- An incremental inflated mapping algorithm based on the batch BFS algorithm is proposed, effectively improving the inflated map and updating the efficiency with a wide-range map and larger inflated size. The algorithm requires only two extra arrays for inflating operations.
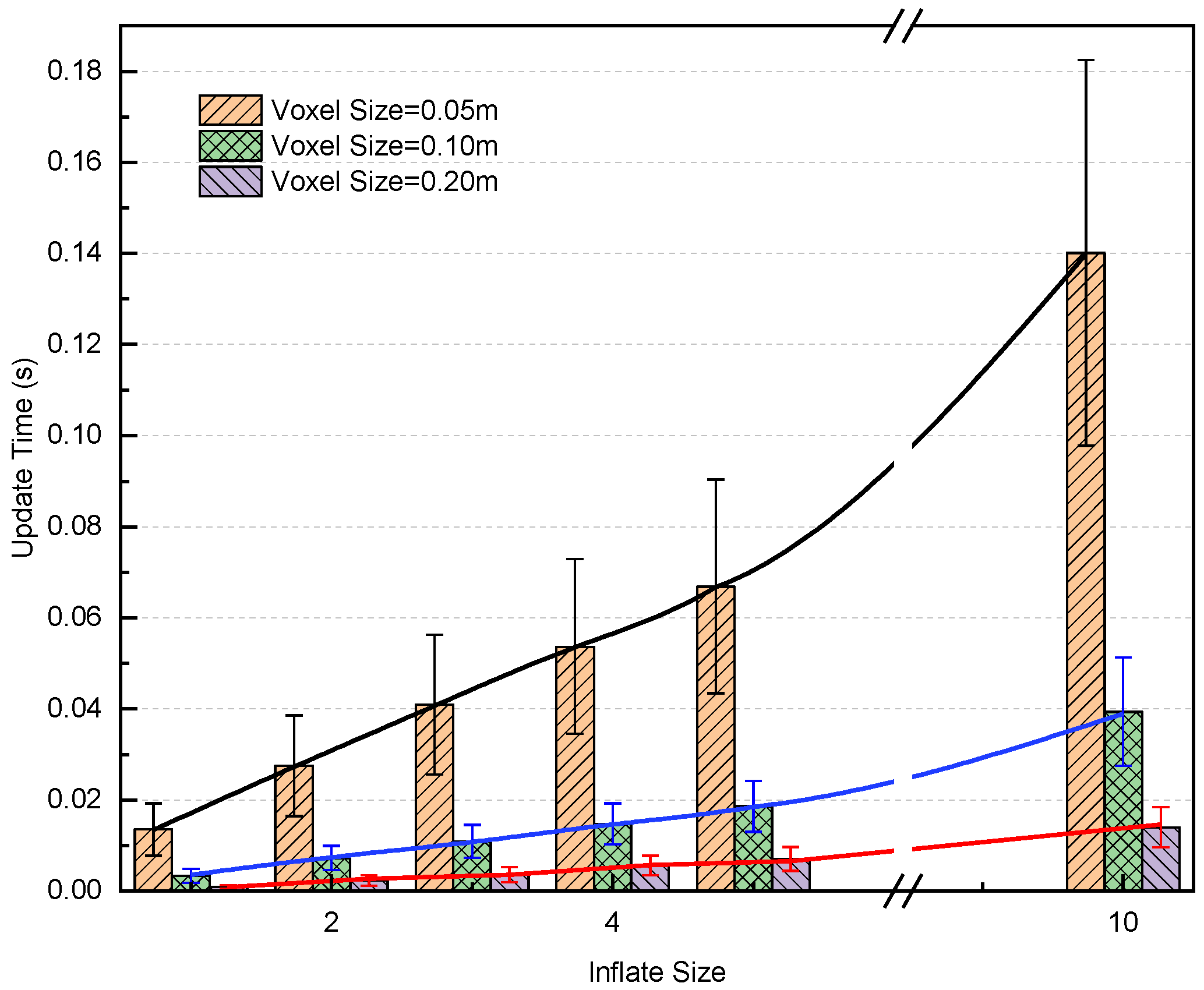
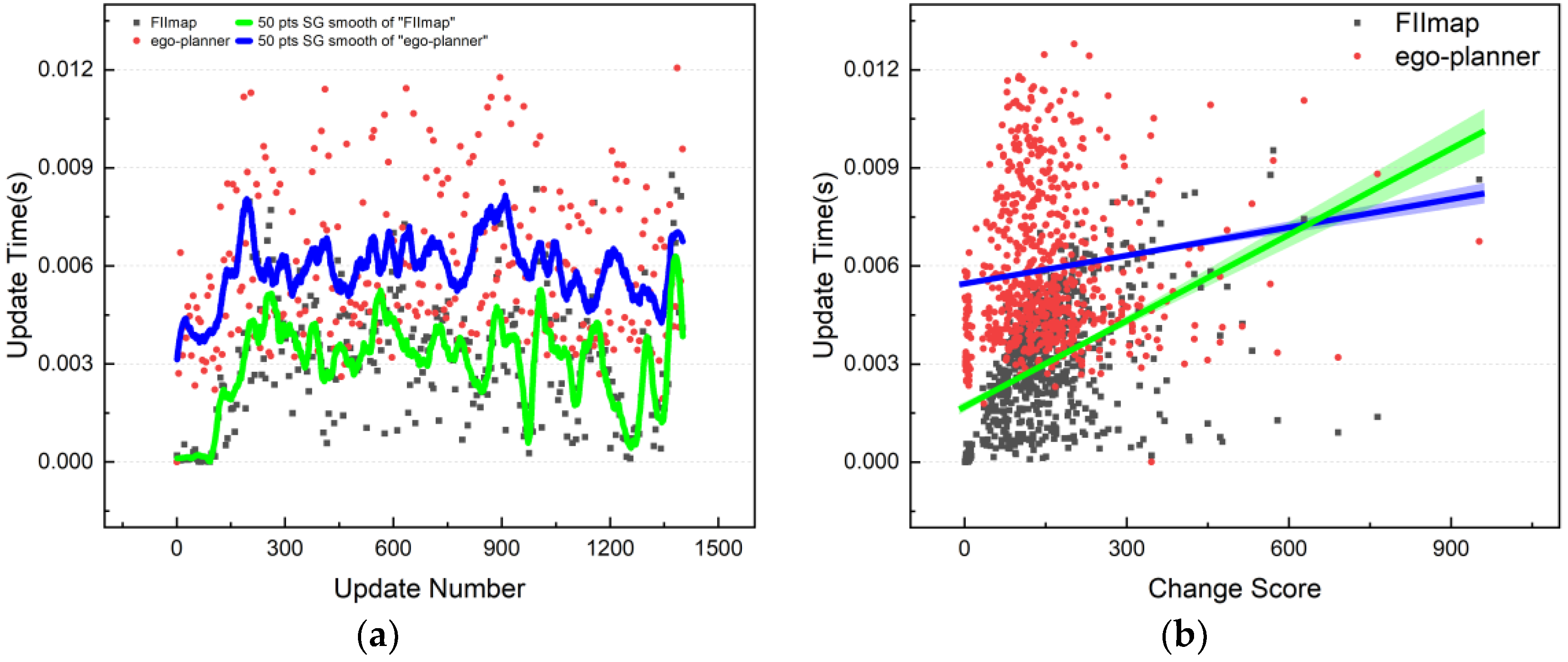
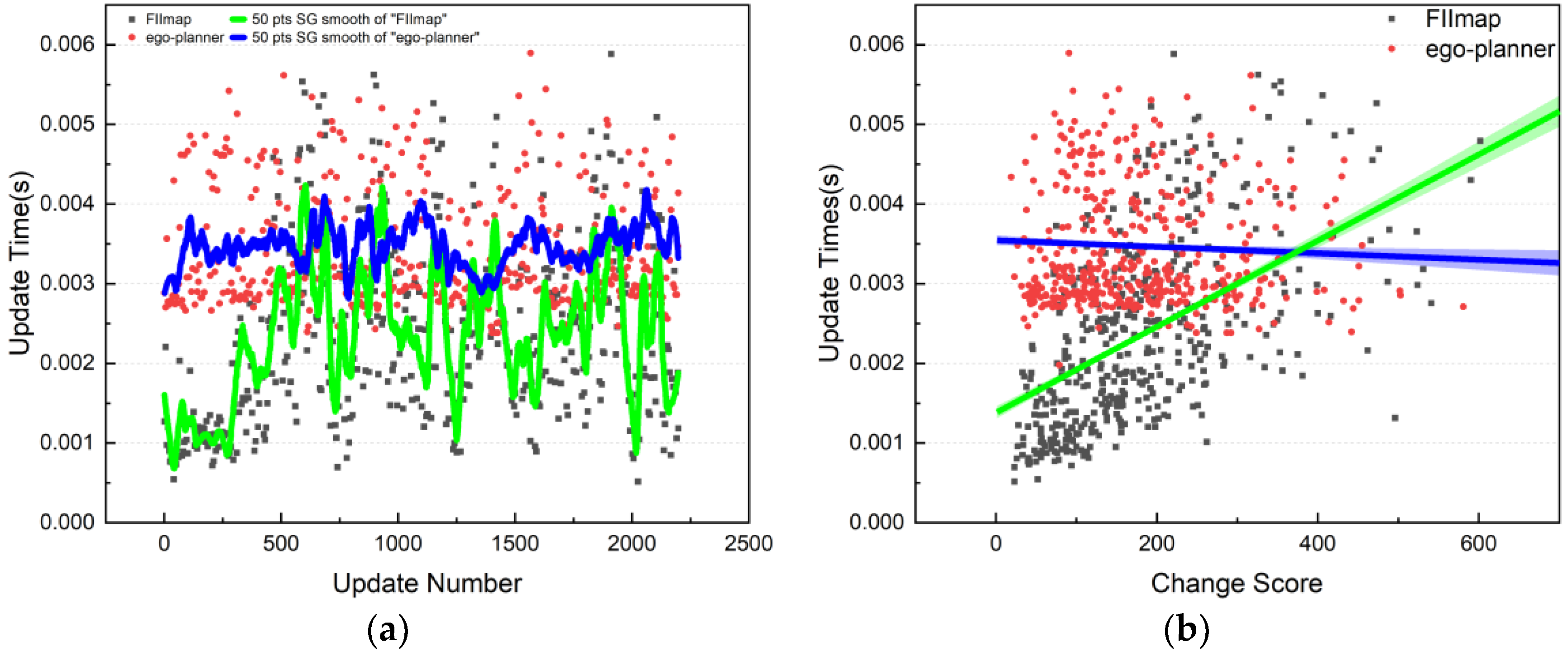
- In the experiments, the effect of voxel resolution, inflated size, and the change score of the scene on the proposed algorithm’s time complexity is analyzed using different real-world data. Compared with the mapping module of ego-planner, the FIImap is more efficient under large inflated and big map sizes.
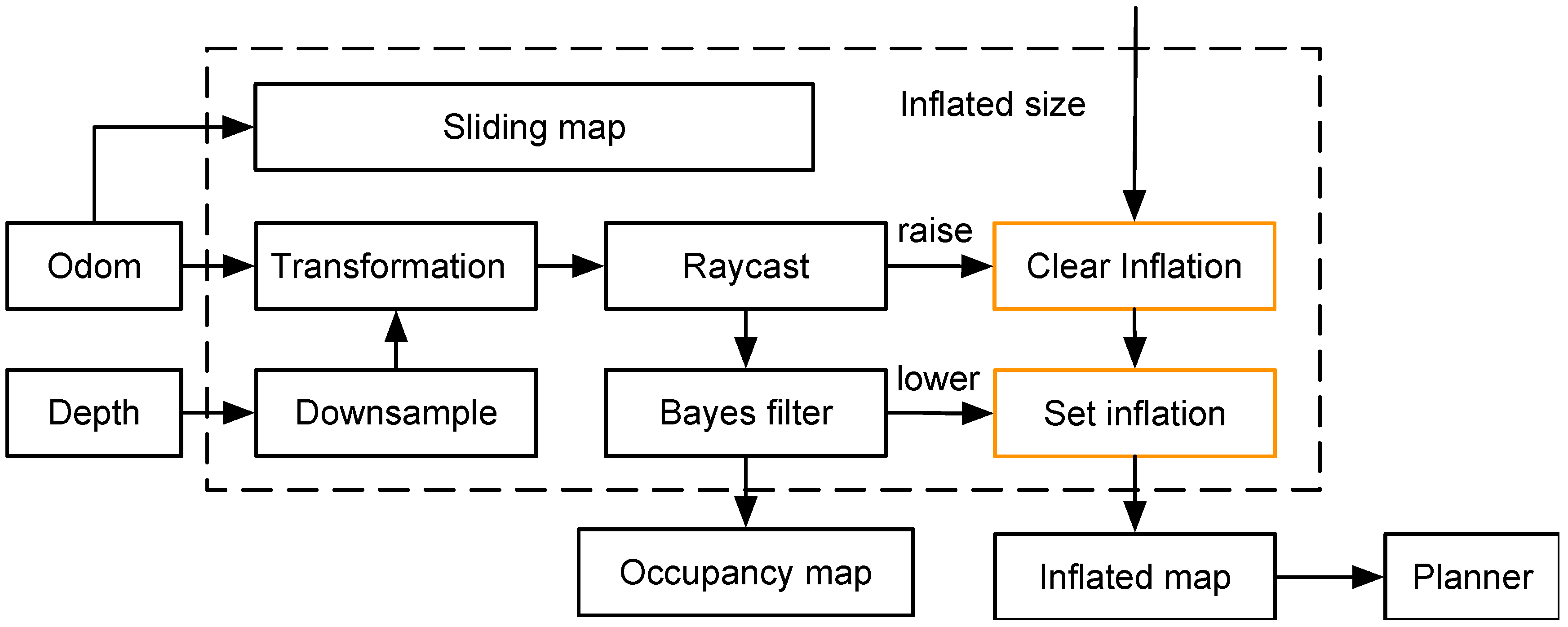
2. System
3. Occupancy Grid Map
3.1. Sliding Map Model
3.2. Processing Depth
3.3. Updating Probability
4. The Proposed Incremental Inflated Mapping Algorithm
4.1. Inflating Update for the Raise Array
| Algorithm 1 Inflate the map for raise array |
| Input: Raise (the array recording indexes of new free voxels). |
|
4.2. Inflating Update for the Lower Array
| Algorithm 2 Inflate the map for lower array |
| Input: Lower (the array recording indexes of new occupied voxels). |
|
4.3. The BFS’s Escape Conditions
4.4. Algorithm’s Complexity Analysis
5. Experiments and Results Analysis
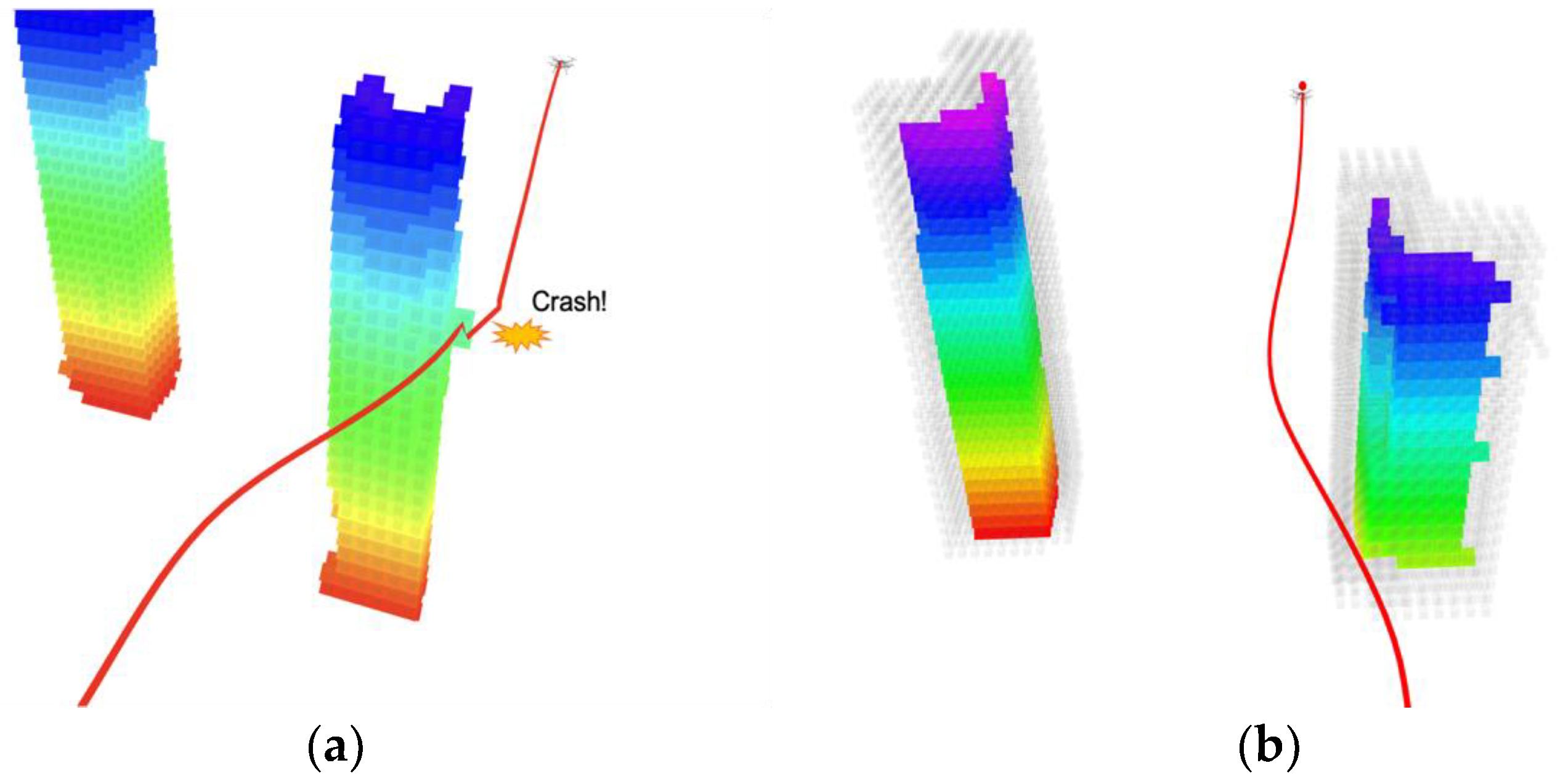
5.1. Simulation in the Unexplored Environment
5.2. Experiments on Real-World Datasets
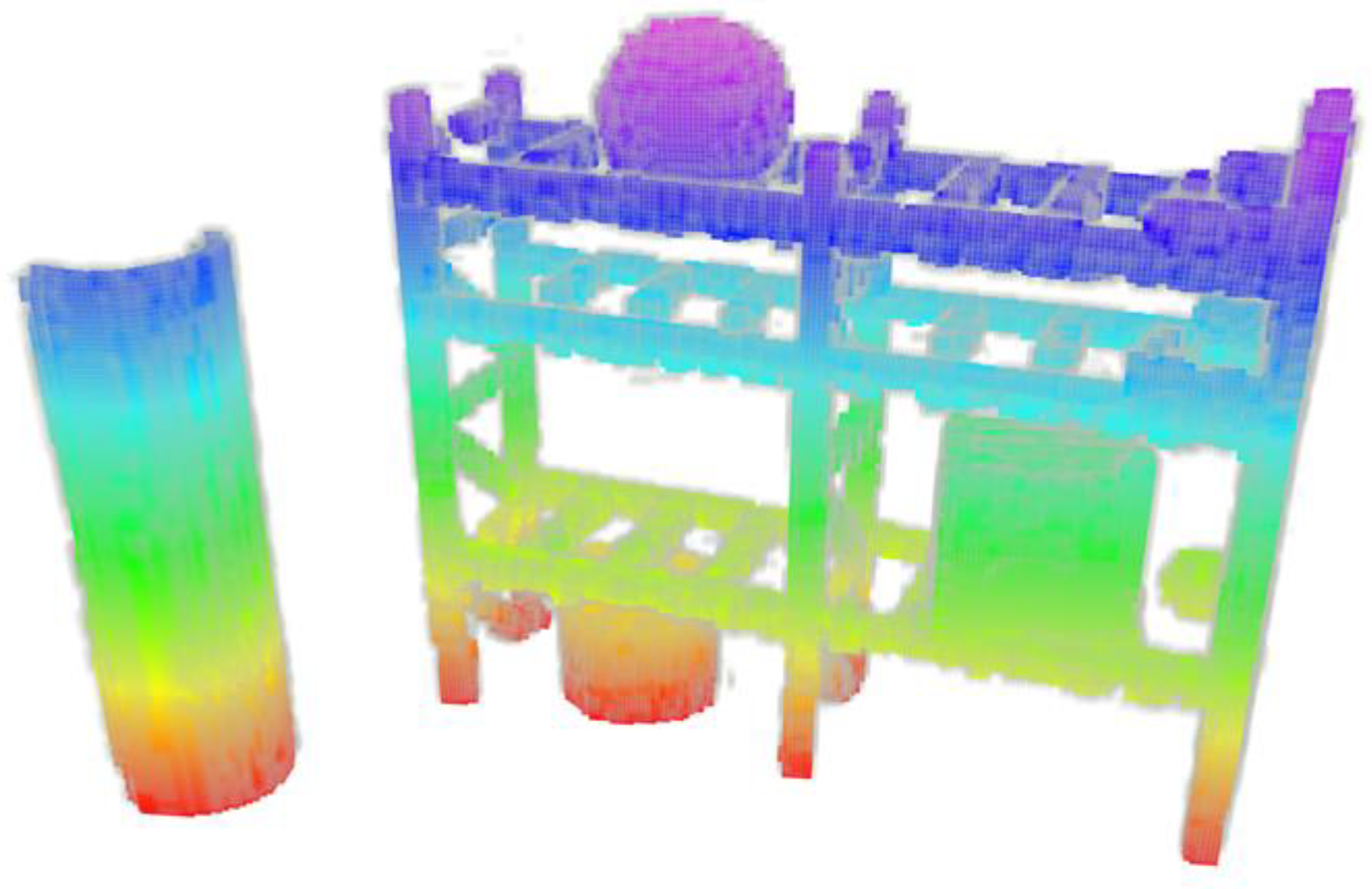
5.2.1. Accuracy Performance
5.2.2. Time Performance with Different Parameters
5.2.3. Comparison with Ego-Planner’s Mapping
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, D.Q.; Guo, X.H.; Huang, P.; Li, F.H. Safety Distance Analysis of 500kV Transmission Line Tower UAV Patrol Inspection. IEEE Lett. Electromagn. Compat. Pract. Appl. 2020, 2, 124–128. [Google Scholar] [CrossRef]
- Kim, S.; Kim, D.; Jeong, S.; Ham, J.W.; Lee, J.K.; Oh, K.Y. Fault Diagnosis of Power Transmission Lines Using a UAV-Mounted Smart Inspection System. IEEE Access 2020, 8, 149999–150009. [Google Scholar] [CrossRef]
- Zhong, P.; Chen, B.; Lu, S.; Meng, X.; Liang, Y. Information-Driven Fast Marching Autonomous Exploration with Aerial Robots. IEEE Robot. Autom. Lett. 2022, 7, 810–817. [Google Scholar] [CrossRef]
- Maciel-Pearson, B.G.; Akçay, S.; Atapour-Abarghouei, A.; Holder, C.; Breckon, T.P. Multi-Task Regression-Based Learning for Autonomous Unmanned Aerial Vehicle Flight Control within Unstructured Outdoor Environments. IEEE Robot. Autom. Lett. 2019, 4, 4116–4123. [Google Scholar] [CrossRef]
- Chatziparaschis, D.; Lagoudakis, M.G.; Partsinevelos, P. Aerial and Ground Robot Collaboration for Autonomous Mapping in Search and Rescue Missions. Drones 2020, 4, 79. [Google Scholar] [CrossRef]
- Liu, X.; Ansari, N. Resource Allocation in UAV-Assisted M2M Communications for Disaster Rescue. IEEE Wirel. Commun. Lett. 2019, 8, 580–583. [Google Scholar] [CrossRef]
- Xu, X.; Qian, Y. Location-Based Hybrid Precoding Schemes and QoS-Aware Power Allocation for Radar-Aided UAV–UGV Cooperative Systems. IEEE Access 2022, 10, 50947–50958. [Google Scholar] [CrossRef]
- Calamoneri, T.; Corò, F.; Mancini, S. A Realistic Model to Support Rescue Operations After an Earthquake via UAVs. IEEE Access 2022, 10, 6109–6125. [Google Scholar] [CrossRef]
- Qin, H.; Meng, Z.; Meng, W.; Chen, X.; Sun, H.; Lin, F.; Ang, M.H. Autonomous Exploration and Mapping System Using Heterogeneous UAVs and UGVs in GPS-Denied Environments. IEEE Trans. Veh. Technol. 2019, 68, 1339–1350. [Google Scholar] [CrossRef]
- Florence, P.R. Integrated Perception and Control at High Speed. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2016. [Google Scholar]
- Zhou, X.; Wen, X.Y.; Wang, Z.P.; Gao, Y.M.; Li, H.J.; Wang, Q.H.; Yang, T.K.; Lu, H.J.; Cao, Y.J.; Xu, C.; et al. Swarm of micro flying robots in the wild. Sci. Robot. 2022, 7, eabm5954. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, Z.P.; Ye, H.K.; Xu, C.; Gao, F. EGO-Planner: An ESDF-Free Gradient-Based Local Planner for Quadrotors. IEEE Robot. Autom. Lett. 2021, 6, 478–485. [Google Scholar] [CrossRef]
- Zhou, B.Y.; Gao, F.; Wang, L.Q.; Liu, C.H.; Shen, S.J. Robust and Efficient Quadrotor Trajectory Generation for Fast Autonomous Flight. IEEE Robot. Autom. Lett. 2019, 4, 3529–3536. [Google Scholar] [CrossRef]
- Chen, Y.Z.; Lai, S.P.; Cui, J.Q.; Wang, B.; Chen, B.M. GPU-Accelerated Incremental Euclidean Distance Transform for Online Motion Planning of Mobile Robots. IEEE Robot. Autom. Lett. 2022, 7, 6894–6901. [Google Scholar] [CrossRef]
- Zucker, M.; Ratliff, N.; Dragan, A.D.; Pivtoraiko, M.; Klingensmith, M.; Dellin, C.M.; Bagnell, J.A.; Srinivasa, S.S. CHOMP: Covariant Hamiltonian optimization for motion planning. Int. J. Robot. Res. 2013, 32, 1164–1193. [Google Scholar] [CrossRef]
- Blochliger, F.; Fehr, M.; Dymczyk, M.; Schneider, T.; Siegwart, R. Topomap: Topological Mapping and Navigation Based on Visual SLAM Maps. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; IEEE: Brisbane, Australia, 2018; pp. 3818–3825. [Google Scholar]
- Wallgrün, J.O. (Ed.) Voronoi-Based Spatial Representations. In Hierarchical Voronoi Graphs: Spatial Representation and Reasoning for Mobile Robots; Springer: Berlin/Heidelberg, Germany, 2010; pp. 45–58. ISBN 978-3-642-10345-2. [Google Scholar]
- Hornung, A.; Wurm, K.M.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: An efficient probabilistic 3D mapping framework based on octrees. Auton. Robots 2013, 34, 189–206. [Google Scholar] [CrossRef]
- Deits, R.; Tedrake, R. Computing Large Convex Regions of Obstacle-Free Space through Semidefinite Programming. In Algorithmic Foundations of Robotics XI; Akin, H.L., Amato, N.M., Isler, V., van der Stappen, A.F., Eds.; Springer Tracts in Advanced Robotics; Springer International Publishing: Cham, Switzerland, 2015; Volume 107, pp. 109–124. ISBN 978-3-319-16594-3. [Google Scholar]
- Kalra, N.; Ferguson, D.; Stentz, A. Incremental Reconstruction of Generalized Voronoi Diagrams on Grids. In Proceedings of the Intelligent Autonomous Systems 9(IAS-9), Tokyo, Japan, 7–9 March 2006. [Google Scholar]
- Lau, B.; Sprunk, C.; Burgard, W. Improved updating of Euclidean distance maps and Voronoi diagrams. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2010), Taipei, Taiwan, 18–22 October 2010; IEEE: Taipei, Taiwan, 2010; pp. 281–286. [Google Scholar]
- Graichen, T.; Schmidt, R.; Richter, J.; Heinkel, U. Occupancy Grid Map Generation from OSM Indoor Data for Indoor Positioning Applications. In Proceedings of the 6th International Conference on Geographical Information Systems Theory, Applications and Management, Prague, Czech Republic, 7–9 May 2020; pp. 168–174. [Google Scholar]
- Gao, F.; Wu, W.; Gao, W.L.; Shen, S.J. Flying on point clouds: Online trajectory generation and autonomous navigation for quadrotors in cluttered environments. J. Field Robot. 2019, 36, 710–733. [Google Scholar] [CrossRef]
- Florence, P.R.; Carter, J.; Ware, J.; Tedrake, R. NanoMap: Fast, Uncertainty-Aware Proximity Queries with Lazy Search Over Local 3D Data. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 7631–7638. [Google Scholar]
- Ren, Y.; Zhu, F.; Liu, W.; Wang, Z.; Lin, Y.; Gao, F.; Zhang, F. Bubble Planner: Planning High-speed Smooth Quadrotor Trajectories using Receding Corridors. arXiv 2022, arXiv:2202.12177. [Google Scholar]
- Daftry, S.; Zeng, S.; Khan, A.; Dey, D.; Melik-Barkhudarov, N.; Bagnell, J.A.; Hebert, M. Robust Monocular Flight in Cluttered Outdoor Environments. arXiv 2016, arXiv:1604.04779. [Google Scholar]
- Tordesillas, J.; Lopez, B.T.; How, J.P. FASTER: Fast and Safe Trajectory Planner for Flights in Unknown Environments. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019. [Google Scholar]
- Chen, J.; Liu, T.B.; Shen, S.J. Online generation of collision-free trajectories for quadrotor flight in unknown cluttered environments. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1476–1483. [Google Scholar]
- Zhou, X.; Zhu, J.; Zhou, H.; Xu, C.; Gao, F. EGO-Swarm: A Fully Autonomous and Decentralized Quadrotor Swarm System in Cluttered Environments. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar]
- Han, L.X.; Gao, F.; Zhou, B.Y.; Shen, S.J. FIESTA: Fast Incremental Euclidean Distance Fields for Online Motion Planning of Aerial Robots. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019. [Google Scholar]
- Nießner, M.; Zollhöfer, M.; Izadi, S.; Stamminger, M. Real-time 3D Reconstruction at Scale using Voxel Hashing. ACM Trans. Graph. TOG 2013, 32, 1–11. [Google Scholar] [CrossRef]
- Ayawli, B.B.K.; Appiah, A.Y.; Nti, I.K.; Kyeremeh, F.; Ayawli, E.I. Path planning for mobile robots using Morphological Dilation Voronoi Diagram Roadmap algorithm. Sci. Afr. 2021, 12, e00745. [Google Scholar] [CrossRef]
- Oleynikova, H.; Taylor, Z.; Fehr, M.; Nieto, J.; Siegwart, R. Voxblox: Incremental 3D Euclidean Signed Distance Fields for On-Board MAV Planning. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1366–1373. [Google Scholar]
- Amanatides, J.; Woo, A. A Fast Voxel Traversal Algorithm for Ray Tracing. Eurographics 1987, 87, 3–10. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Resolution = 0.1 m | Resolution = 0.2 m |
|---|---|---|
| FIImap | 91.76 6.01 | 97.03 2.76 |
| ego-planner | 92.55 5.01 | 96.05 3.76 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Wang, L.; Ren, Y.; Chen, F.; Zhu, W. FIImap: Fast Incremental Inflate Mapping for Autonomous MAV Navigation. Electronics 2023, 12, 534. https://doi.org/10.3390/electronics12030534
Li Y, Wang L, Ren Y, Chen F, Zhu W. FIImap: Fast Incremental Inflate Mapping for Autonomous MAV Navigation. Electronics. 2023; 12(3):534. https://doi.org/10.3390/electronics12030534
Chicago/Turabian StyleLi, Yong, Lihui Wang, Yuan Ren, Feipeng Chen, and Wenxing Zhu. 2023. "FIImap: Fast Incremental Inflate Mapping for Autonomous MAV Navigation" Electronics 12, no. 3: 534. https://doi.org/10.3390/electronics12030534
APA StyleLi, Y., Wang, L., Ren, Y., Chen, F., & Zhu, W. (2023). FIImap: Fast Incremental Inflate Mapping for Autonomous MAV Navigation. Electronics, 12(3), 534. https://doi.org/10.3390/electronics12030534