
Accurate Fault Location Method Based on Time-Domain Information Estimation for Medium-Voltage Distribution Network

 and
and 
Abstract
:1. Introduction
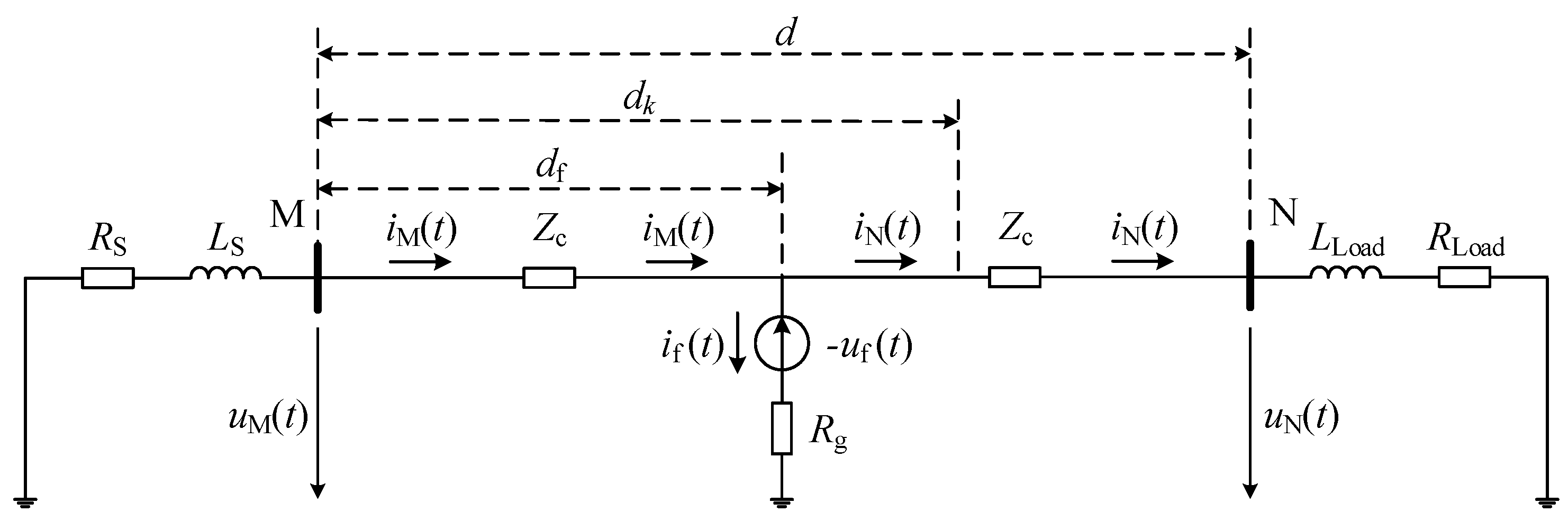
2. Time-Domain Bergeron Location Principle
2.1. Basic Location Principle
2.2. Influencing Factors of Location Accuracy
3. Location Method Based on Time-Domain Information Estimation
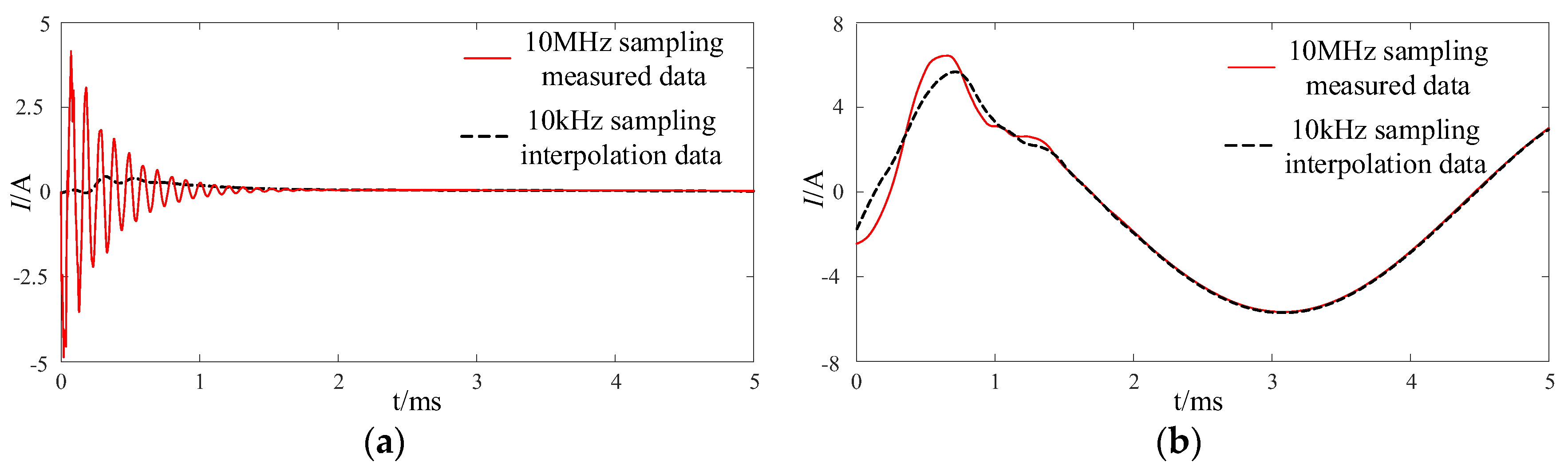
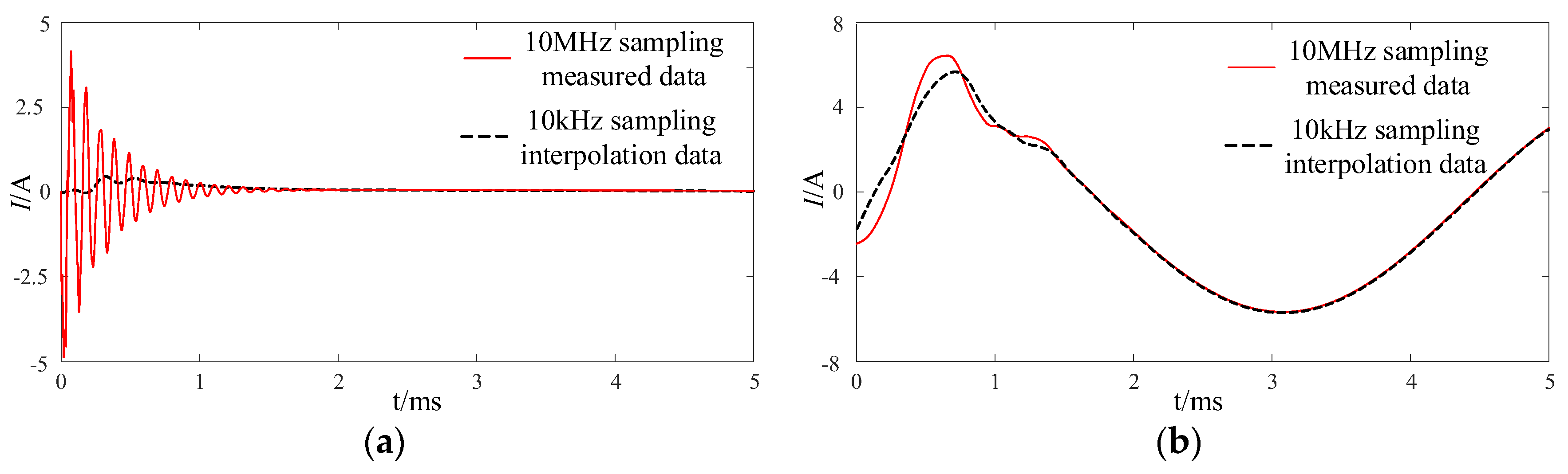
3.1. Data Pre-Processing Method at Low Sampling Rate
3.2. The Location Principle of Estimating Current Based on Time-Domain Bergeron
3.3. Location Method Based on Time-Domain Bergeron Current Estimation
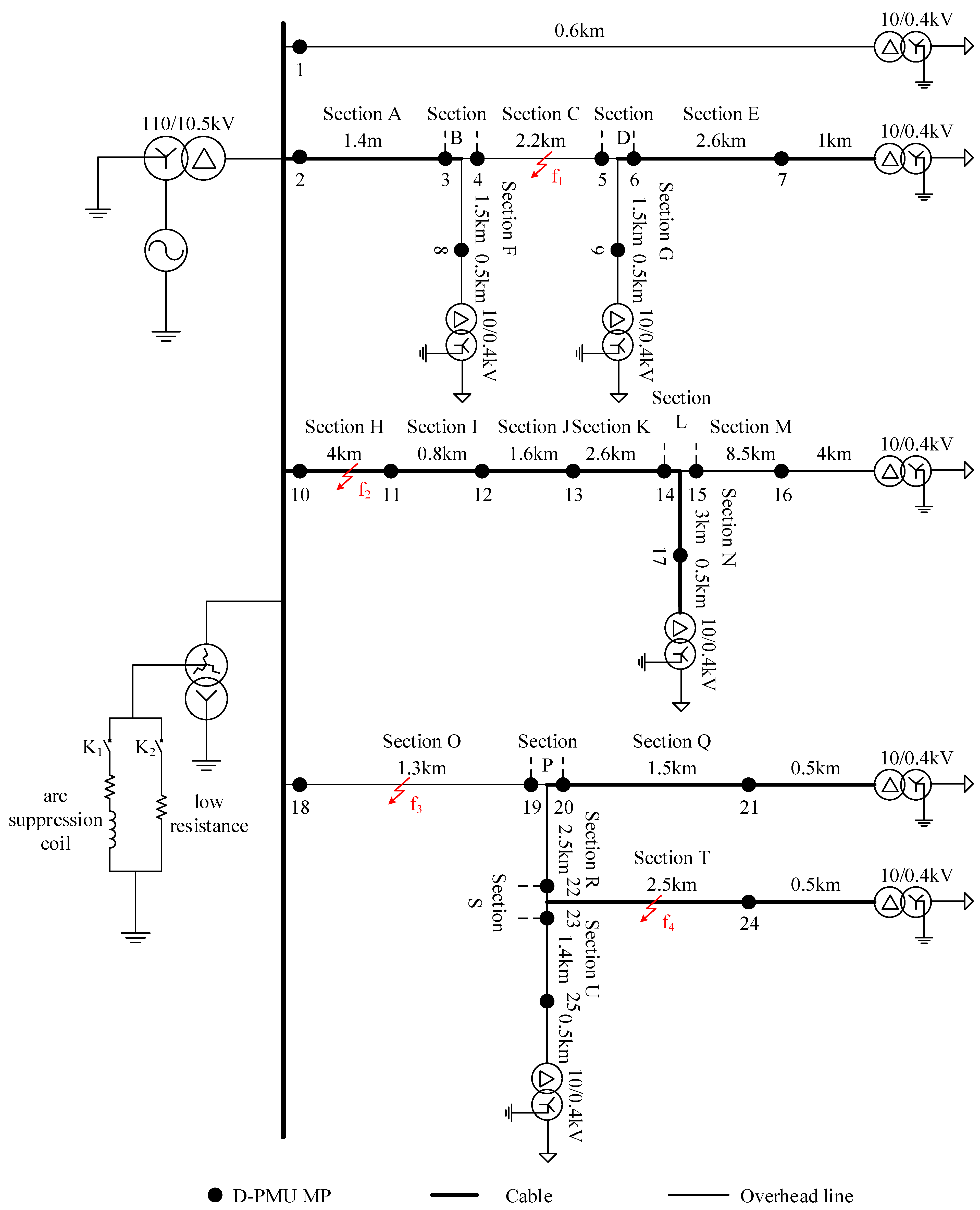
4. Simulation Analysis
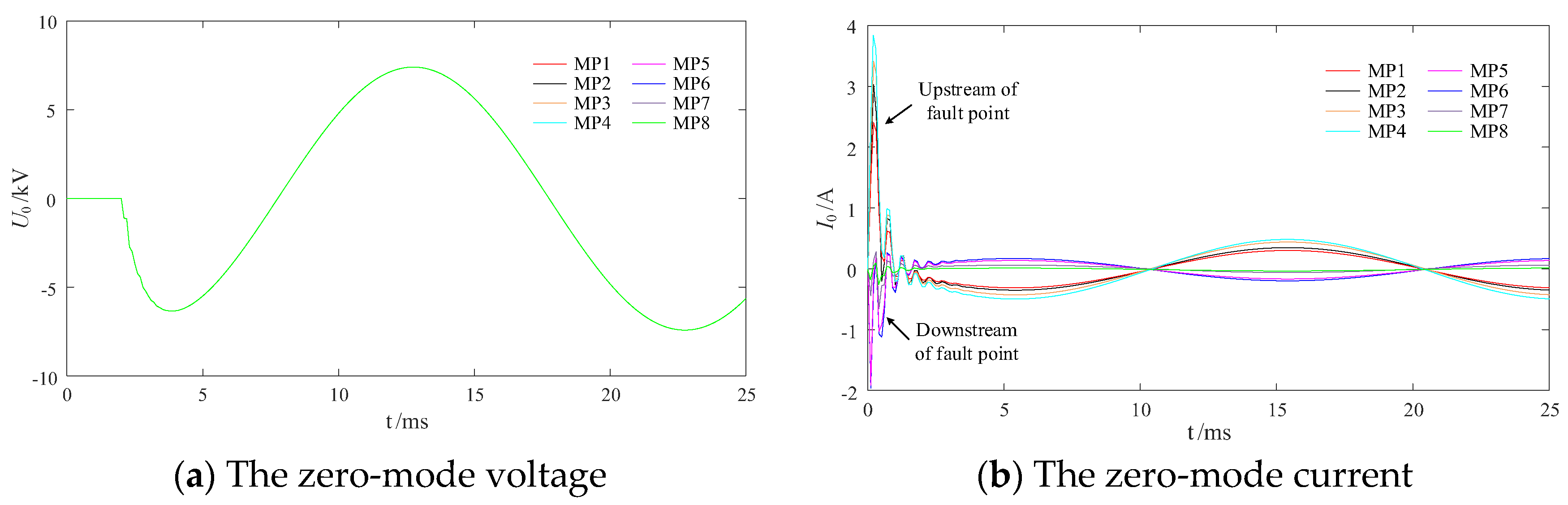
4.1. Example Fault f3 Analysis
4.2. Analysis of the Influence of Neutral Grounding Mode
4.3. Analysis of the Influence of Fault Conditions
4.4. Sampling Rate Impact Analysis
4.5. Performance Comparison with Existing Methods
5. Conclusions
- (1)
- This method preprocesses the measurement data by low-frequency time-domain signal reconstruction and cubic spline interpolation to improve the sampling rate, which effectively solves the contradiction between the high sampling rate requirement of the precise location and the limited actual sampling rate.
- (2)
- By comprehensively utilizing the voltage and current constraints at the fault point, the fault current difference location criterion is constructed, which overcomes the defect of the insufficient sensitivity of the traditional location method based on the time-domain Bergeron equation.
- (3)
- The fault location can be determined only by calculating the fault current difference at a limited number of estimated points and the calculation amount is greatly reduced. The simulation results show that the method has the technical performance of sensitively reflecting the grounding fault of the MVDN, and can achieve an accurate fault location under low sampling rate conditions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guo, L.W.; Xue, Y.D.; Xu, B.Y.; Cai, Y.C.; Zhang, S.F. Research on Effects of Neutral Grounding Modes on Power Supply Reliability in Distribution Networks. Power Syst. Technol. 2015, 39, 2340–2345. [Google Scholar]
- Cesar, G.; Ali, A. Fault location in active distribution networks containing distributed energy resources (DERs). IEEE Trans. Power Deliv. 2021, 36, 885–897. [Google Scholar]
- Deng, F.; Zu, Y.R.; Mao, Y.; Zeng, X.J.; Li, Z.W.; Tang, X.; Wang, Y. A method for distribution network line selection and fault location based on a hierarchical fault monitoring and control system. Int. J. Electr. Power Energy Syst. 2020, 123, 106061. [Google Scholar] [CrossRef]
- Qiao, J.; Yin, X.G.; Wang, Y.K.; Xu, W.; Tan, L.M. An accurate fault location method for distribution network based on active transfer arc-suppression device. Energy Rep. 2021, 7, 552–560. [Google Scholar] [CrossRef]
- Tang, J.R.; Yin, X.G.; Zhang, Z.; Yang, C.; Ye, L.; Qi, X.W. Survey of fault location technology for distribution networks. Electr. Power Autom. Equip. 2013, 33, 7–13. [Google Scholar]
- Qiao, J.; Yin, X.G.; Wang, Y.K.; Xu, W.; Tan, L.M. A multi -terminal traveling wave fault location method for active distribution network based on residual clustering. Int. J. Electr. Power Energy Syst. 2021, 131, 107070. [Google Scholar] [CrossRef]
- Apostolopoulos, C.A.; Arsoniadis, C.G.; Georgilakis, P.S.; Nikolaidis, V.C. Unsynchronized measurements-based fault location algorithm for active distribution systems without requiring source impedances. IEEE Trans. Power Deliv. 2022, 37, 2071–2082. [Google Scholar] [CrossRef]
- Aboshady, F.M.; Sumner, M.; Thoma, D.W.P. A double end fault location technique for distribution systems based on fault-generated transients. In Proceedings of the IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 19–21 June 2017. [Google Scholar]
- He, J.H.; Zhang, M.; Luo, G.M.; Yu, B.; Hong, Z.Q. A Fault Location Method for Flexible DC Distribution Network Based on Fault Transient Process. Power Syst. Technol. 2017, 41, 985–991. [Google Scholar]
- Li, Z.; Wang, X.; Tian, B.; Li, Z.; Weng, H.A. Fast Fault Location Method Based on Distribution Voltage Regularities along Transmission Line. Trans. China Electrotech. Soc. 2018, 33, 112–120. [Google Scholar]
- Gao, S.P.; Jiale, S.N.; Song, G.B.; Zhang, J.K.; Jiao, Z.B. Fault Location Method for HVDC Transmission Lines on the Basis of the Distributed Parameter Model. Proc. CSEE 2010, 30, 75–80. [Google Scholar]
- Zhang, T.; Yu, H.B.; Zeng, P.; Sun, L.X.; Song, C.H.; Liu, J.C. Single phase fault diagnosis and location in active distribution network using synchronized voltage measurement. Int. J. Electr. Power Energy Syst. 2020, 117, 105572. [Google Scholar] [CrossRef]
- Ledesma, J.J.G.; Nascimento, K.B.; Araujo, L.R.; Penido, D.R.R. A two-level ANN-based method using synchronized measurements to locate high-impedance fault in distribution systems. Electr. Power Syst. Res. 2020, 188, 106576. [Google Scholar] [CrossRef]
- Liang, J.F.; Jing, T.J.; Niu, H.N.; Wang, J.B. Two-Terminal Fault Location Method of Distribution Network Based on Adaptive Convolution Neural Network. IEEE Access 2020, 8, 54035–54043. [Google Scholar] [CrossRef]
- Aftab, M.A.; Hussain, S.S.; Ali, I.; Ustun, T.S. Dynamic protection of power systems with high penetration of renewables: A review of the traveling wave based fault location techniques. Int. J. Electr. Power Energy Syst. 2020, 114, 105410. [Google Scholar] [CrossRef]
- Ran, Y.; Zhou, B.X.; Yang, Z.Y.; Tang, C.X.; Wang, P. A method of single ended fault location for distribution network based on estimated contralateral information. Power Syst. Prot. Control 2014, 42, 25–31. [Google Scholar]
- Wang, G.; Xu, Z.L.; Liang, Y.S.; Gong, C. Single terminal time domain fault location method based on the similarity of square wave for arc grounding fault. Power Syst. Prot. Control 2012, 40, 109–113. [Google Scholar]
- Eissa, M.M. Ground Distance Relay Compensation Based on R-L Model Parameter Identification. Proc. CSEE 2004, 24, 119–125. [Google Scholar]
- Wang, B.; Ni, J.; Wang, H.W.; Xie, M. Single-end Fault Location for High Impedance Arc Grounding Fault in Transmission Line. Proc. CSEE 2017, 37, 1333–1340. [Google Scholar]
- Wei, Z.N.; He, H.; Zhang, Y.P. Advanced Genetic Algorithm for fault interval location of distribution network. Proc. CSEE 2002, 22, 127–130. [Google Scholar]
- Zhang, J.N.; Zhou, R.; Zhou, K. Application of improved ant colony algorithm in fault-section location of complex distribution network. Grid Technol. 2011, 35, 224–228. [Google Scholar]
- Ge, J.K.; Zhang, J.; Hu, X.; Li, T.Y.; Yao, H.Y.; Su, Y.; Wu, J.F. A fault location method of error correction based on ant colony algorithm for distribution network. In Proceedings of the 2017 IEEE 2nd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 25–26 March 2017; pp. 18–21. [Google Scholar]
- Liu, B.; Wang, F.; Chen, C.; Huang, H.C.; Dong, X.Z. Application of harmonic Algorithm in Fault Location of Distribution network with DG. Trans. China Electrotech. Soc. 2013, 28, 280–284. [Google Scholar]
- Zheng, C.L.; Zhu, G.L. Intelligent distributed fault segment location algorithm based on Bayesian estimation. Power Grid Technol. 2020, 44, 1561–1567. [Google Scholar]
- Wu, X.G.; Liu, Z.Q.; Tian, L.T.; Ding, D.; Yang, S.L. Energy storage location and capacity determination of Distribution network based on improved multi-objective particle swarm Optimization. Power Grid Technol. 2014, 38, 3405–3411. [Google Scholar]
- Liu, J.Q.; Ponci, F.; Monti, A.; Muscas, C.; Pegoraro, P.A.; Sulis, S. Optimal meter placement for robust measurement system in active distribution grids. IEEE Trans. Instrum. Meas. 2014, 63, 1096–1105. [Google Scholar] [CrossRef]
- Ren, J.; Venkata, S.S.; Sortomme, E. An Accurate Synchrophasor Based Fault Location Method for Emerging Distribution Systems. IEEE Trans. Power Deliv. 2014, 29, 297–298. [Google Scholar] [CrossRef]
- Chen, X.; Jiao, Z.B. Accurate Fault Location Method of Distribution Network with Limited Number of PMUs. In Proceedings of the China International Conference on Electricity Distribution(CICED), Tianjin, China, 17–19 September 2018. [Google Scholar]
- Lin, J.Y.; Chen, R.; Li, Y.L.; Chen, W. Distribution network fault location method based on Parameter identification. South. Power Grid Technol. 2019, 4, 80–87. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MP | 18 | b1 | b2 | b3 | b4 | b5 | b6 | |
| 0.1304 | 0.1210 | 0.1094 | 0.1011 | 0.0903 | 0.0823 | 0.0719 | ||
| MP | b7 | b8 | b9 | b10 | b11 | b12 | 19 | |
| 0.0642 | 0.0580 | 0.0632 | 0.0724 | 0.0801 | 0.0883 | 0.2110 |
| MP | 18 | b1 | b2 | b3 | b4 | b5 | b6 | |
| 1.887 × 10−5 | 0 | 1.932 × 10−5 | 0 | 1.887 × 10−5 | 0 | 1.887 × 10−5 | ||
| MP | b7 | b8 | b9 | b10 | b11 | b12 | 19 | |
| 0 | 0 | 1.887 × 10−5 | 1.932 × 10−5 | 0 | 1.887 × 10−5 | 1.932 × 10−5 |
| Fault | Distance from the First End of the Section | Neutral Point Treatment | Location Results | Absolute Error |
|---|---|---|---|---|
| f1 | 2100 m | non-ground | 2000 m | 100 m |
| arc suppression coil | 2000 m | 100 m | ||
| low resistance | 2200 m | 100 m | ||
| f2 | 2000 m | non-ground | 1900 m | 100 m |
| arc suppression coil | 1900 m | 100 m | ||
| low resistance | 1800 m | 200 m | ||
| f3 | 650 m | non-ground | 800 m | 150 m |
| arc suppression coil | 800 m | 150 m | ||
| low resistance | 600 m | 50 m | ||
| f4 | 1050 m | non-ground | 900 m | 150 m |
| arc suppression coil | 1000 m | 50 m | ||
| low resistance | 1200 m | 150 m |
| Fault | Distance from the First End of the Section | Initial Phase Angles | Transition Resistance | Location Results | Absolute Error |
|---|---|---|---|---|---|
| f1 | 2100 m | 0° | 2000 Ω | 2200 m | 100 m |
| 30° | 1500 Ω | 2200 m | 100 m | ||
| f2 | 2000 m | 60° | 1000 Ω | 1900 m | 100 m |
| 90° | 0 Ω | 2200 m | 200 m | ||
| f3 | 650 m | 30° | 2000 Ω | 800 m | 150 m |
| 60° | 1500 Ω | 800 m | 150 m | ||
| f4 | 1050 m | 90° | 1000 Ω | 1200 m | 150 m |
| 0° | 0 Ω | 1100 m | 50 m |
| Fault | Distance from the First End of the Section | Sampling Rate | Location Results | Absolute Error |
|---|---|---|---|---|
| f1 | 2100 m | 10 kHz | 2000 m | 100 m |
| 10 MHz | 2100 m | 0 m | ||
| f2 | 2000 m | 10 kHz | 2100 m | 100 m |
| 10 MHz | 2000 m | 0 m | ||
| f3 | 650 m | 10 kHz | 800 m | 150 m |
| 10 MHz | 600 m | 50 m | ||
| f4 | 1050 m | 10 kHz | 1200 m | 150 m |
| 10 MHz | 1000 m | 50 m |
| Fault | Initial Phase Angle | Transition Resistance | The Positioning Error of the Proposed Method/m | Positioning Error of the Existing Method/m |
|---|---|---|---|---|
| f1 | 0° 45° | 200 Ω | 100 m | 242.6 |
| 1000 Ω | 100 m | 312.1 | ||
| f2 | 20° 70° | 600 Ω | 100 m | 179.3 |
| 10 Ω | 150 m | 246.9 | ||
| f3 | 10° 50° | 500 Ω | 50 m | 197.4 |
| 1500 Ω | 100 m | 186.5 | ||
| f4 | 15° 80° | 0 Ω | 100 m | 213.8 |
| 700 Ω | 150 m | 196.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, G.; Chen, R.; Han, Z.; Liu, H.; Liu, M.; Zhang, K.; Xu, C.; Wang, Y. Accurate Fault Location Method Based on Time-Domain Information Estimation for Medium-Voltage Distribution Network. Electronics 2023, 12, 4733. https://doi.org/10.3390/electronics12234733
Sun G, Chen R, Han Z, Liu H, Liu M, Zhang K, Xu C, Wang Y. Accurate Fault Location Method Based on Time-Domain Information Estimation for Medium-Voltage Distribution Network. Electronics. 2023; 12(23):4733. https://doi.org/10.3390/electronics12234733
Chicago/Turabian StyleSun, Guanqun, Rusi Chen, Zheyu Han, Haiguang Liu, Meiyuan Liu, Ke Zhang, Chaozheng Xu, and Yikai Wang. 2023. "Accurate Fault Location Method Based on Time-Domain Information Estimation for Medium-Voltage Distribution Network" Electronics 12, no. 23: 4733. https://doi.org/10.3390/electronics12234733
APA StyleSun, G., Chen, R., Han, Z., Liu, H., Liu, M., Zhang, K., Xu, C., & Wang, Y. (2023). Accurate Fault Location Method Based on Time-Domain Information Estimation for Medium-Voltage Distribution Network. Electronics, 12(23), 4733. https://doi.org/10.3390/electronics12234733