

Large-Scale Service Function Chaining Management and Orchestration in Smart City



Abstract
:1. Introduction
2. Background Studies and Related Works
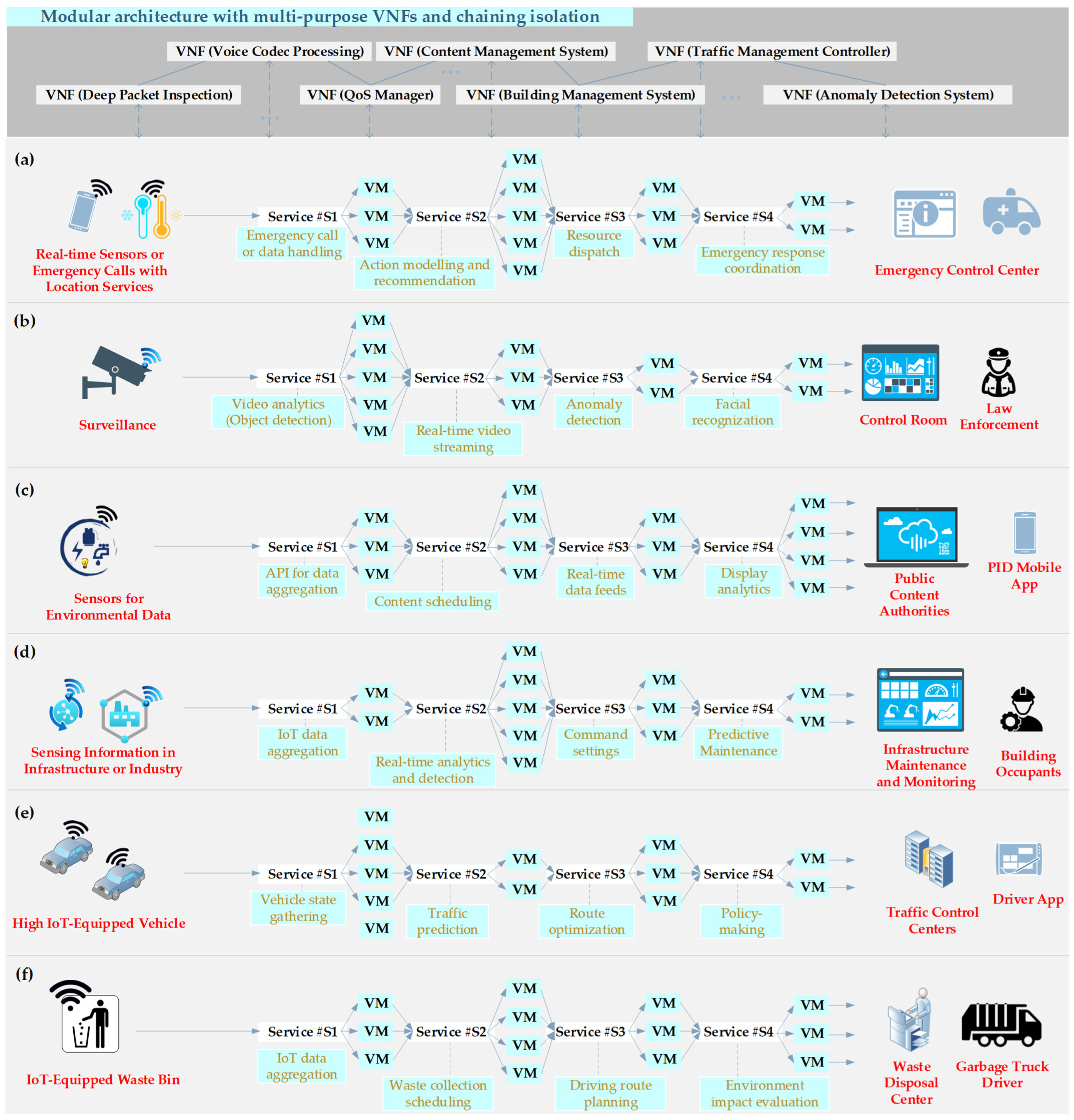
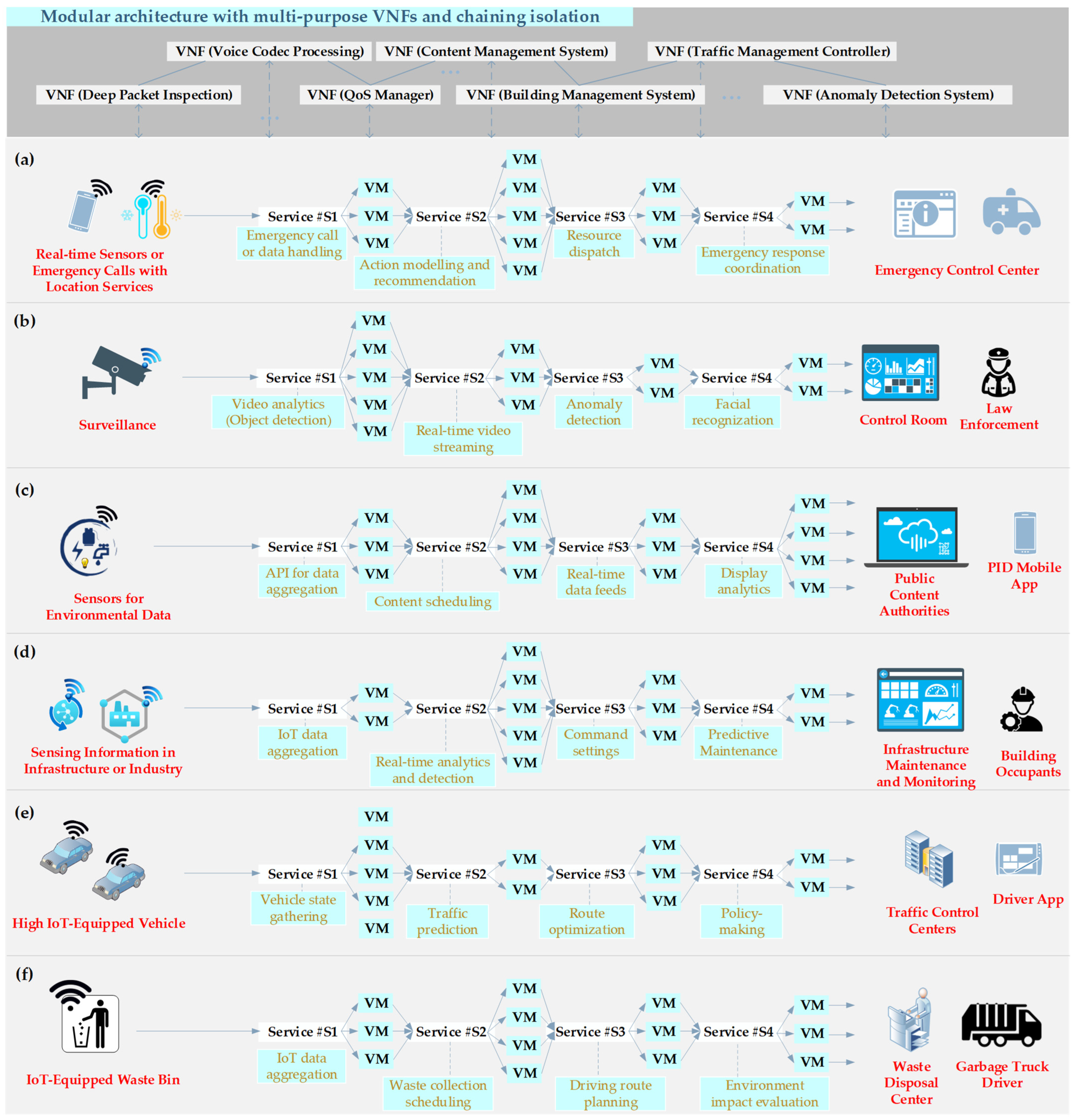
2.1. IoT Service Composition
2.2. QCI for Smart City Applications
- QCI 1 (conversational voice) is typically used for voice communication services, including smart emergency services (e.g., emergency response systems, public safety networks, or other government services).
- QCI 2 (conversational video) is designed for real-time video surveillance systems in traffic monitoring, object detection, facial recognition, or other visual monitoring applications.
- QCI 4 (buffered streaming) is suitable for smart public information displays (PIDs) such as real-time information and interactive features to engage and inform the public (e.g., digital signage, message boards, or even live event streaming).
- QCI 70 (mission critical data) is designed for services that require low latency and high reliability, including smart applications to control critical infrastructure in the city (e.g., utility grid management, building automation, or electricity distribution).
- QCI 79 (V2X messages) is indicated for the components of modern urban mobility by gathering information on vehicles-to-vehicles, vehicles-to-infrastructure, vehicles-to-pedestrians, and vehicle-to-networks to develop a smart transportation system. With guaranteed performance indicators, smart transportation offers traffic flow optimization and safety enhancement in the city.
- QCI 9 (background) is intended for applications that have lower priority and can tolerate delay, including sensor data collection, environmental monitoring, waste management, or other non-real-time data flows.
2.3. GNN-Based Optimization
3. The Proposed GNN for Large-Scale SFC
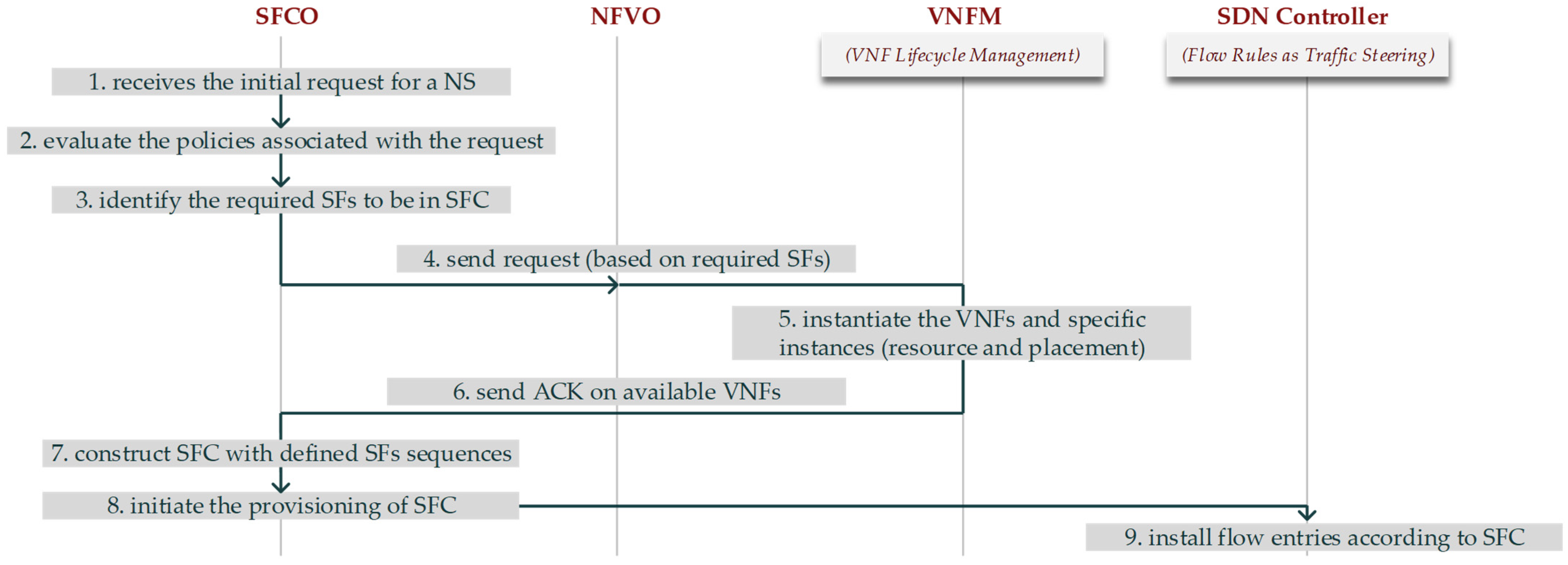
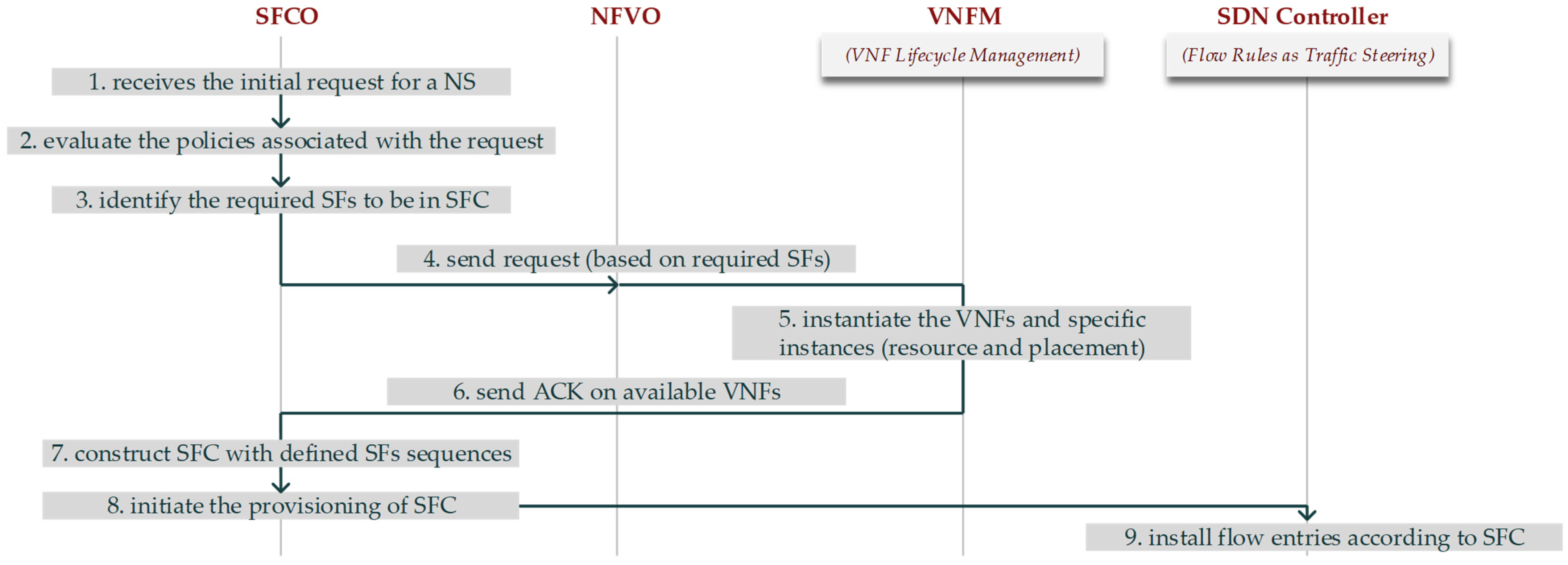
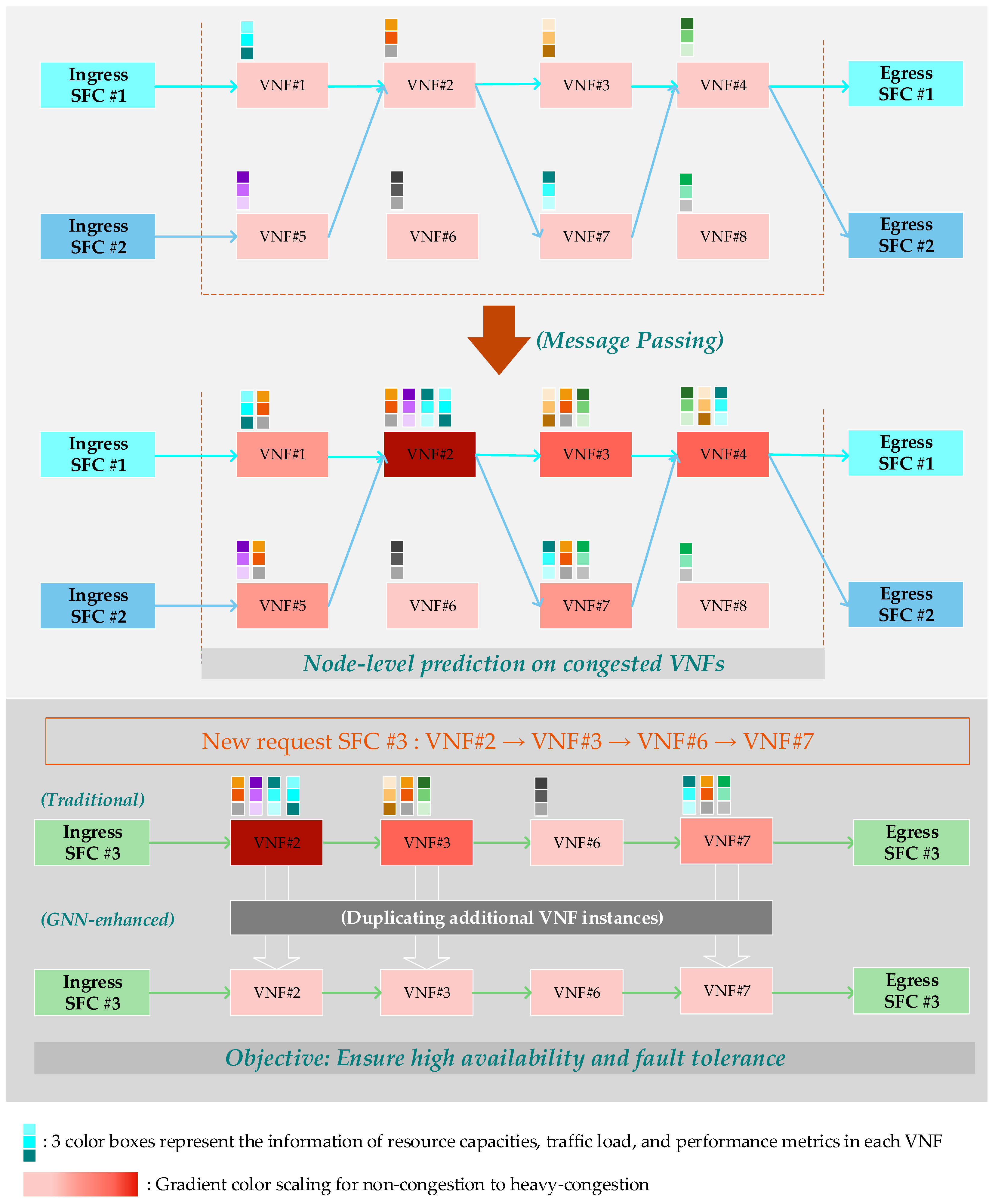
3.1. System Model and Working Flow
3.2. Algorithm Designs and Orchestration Conditions
- If current loading and operating statues weight the class probability on and to output 0, the orchestration policy duplicates VNF- in other physical nodes. Decision variable is re-configured to alter the placement, and SDN controller installs the flow rule accordingly.
- Otherwise, if and approximation from GNN output reflects to output 0, we reconsider the decision variable to check for alternative VNF instances that can be matched.
- Furthermore, , , and are re-adjusted to ensure that the approximation satisfies the QoS constraints , as given in Equations (2)–(4).
4. Performance Evaluation
4.1. Simulation Environment
- Threshold-based SFC is a traditional approach to managing SFC requests in a network that relies on predefined thresholds or limits for resource usage, latency, or traffic volume. When an SFC request is received, the threshold-based system evaluates whether the request meets the predefined criteria. If the request exceeds these thresholds, it will be rejected or placed in a queue until resources become available.
- Load balancing SFC is an approach that aims to evenly distribute network traffic and service requests across available resources to prevent the overloading of specific network functions or host servers. When an SFC request is received, the load balancing system assesses the current workload on available resources, then directs the request to the least loaded resource or server.
4.2. Result and Discussion
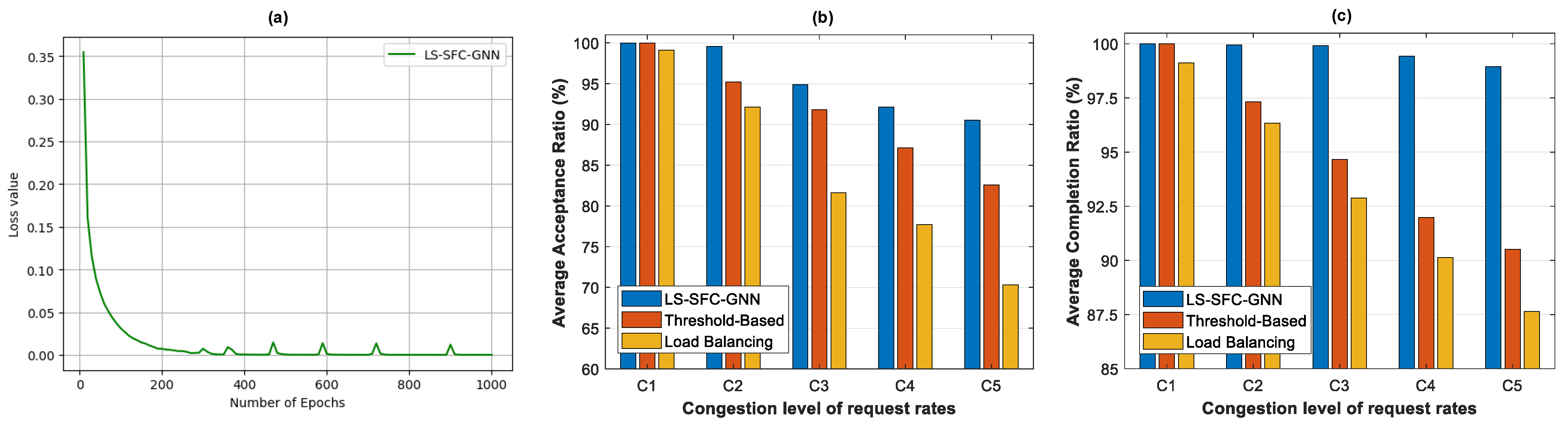
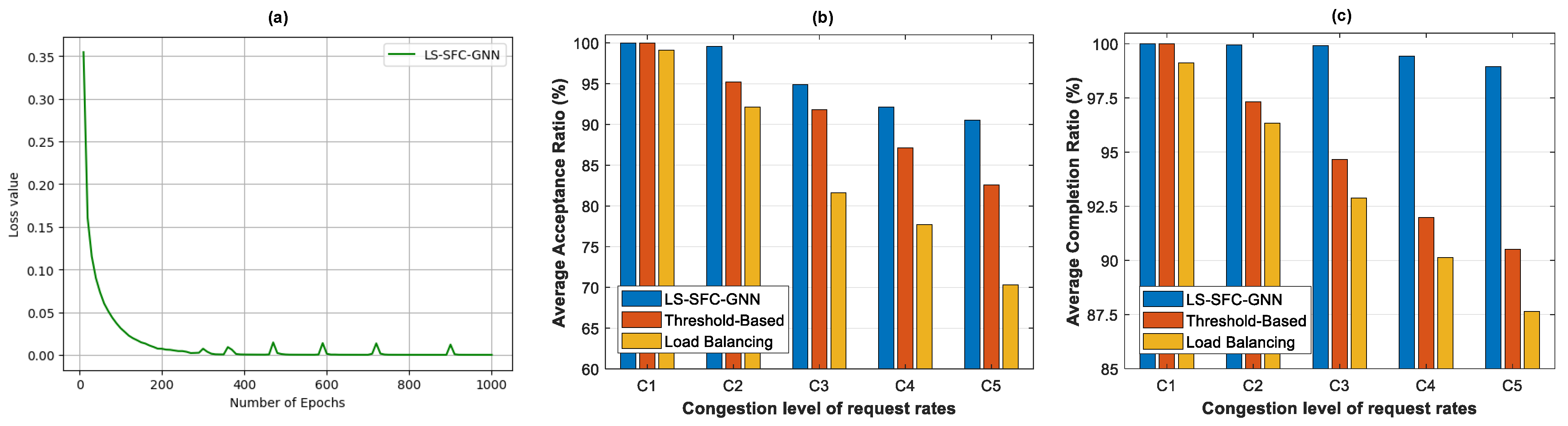
- Loss values of GNN are a measure of how well the model is learning the relationships between nodes in a graph. During training, the goal is to minimize the loss (error values of and to indicate whether the node requires duplication or is still efficient in the current timeslot, compared to the actual performances). The purpose of monitoring the loss values of the GNN is to assess the model learning progress and ensure that the model is converging to a better policy in SFC orchestration.
- The average acceptance ratio is a measure of how well the orchestrator can handle the load of incoming SFC requests by quantifying the proportion of accepted requests over the total number of received requests. The output of this ratio reflects the orchestrator capability to whether can serve the large-scale incoming demand or not.
- The average completion ratio is a measure of the orchestrator successfully completing SFC requests once they have been accepted. A high average completion ratio indicates that the system not only accepts requests but also effectively delivers the requested services to ensure reliability.
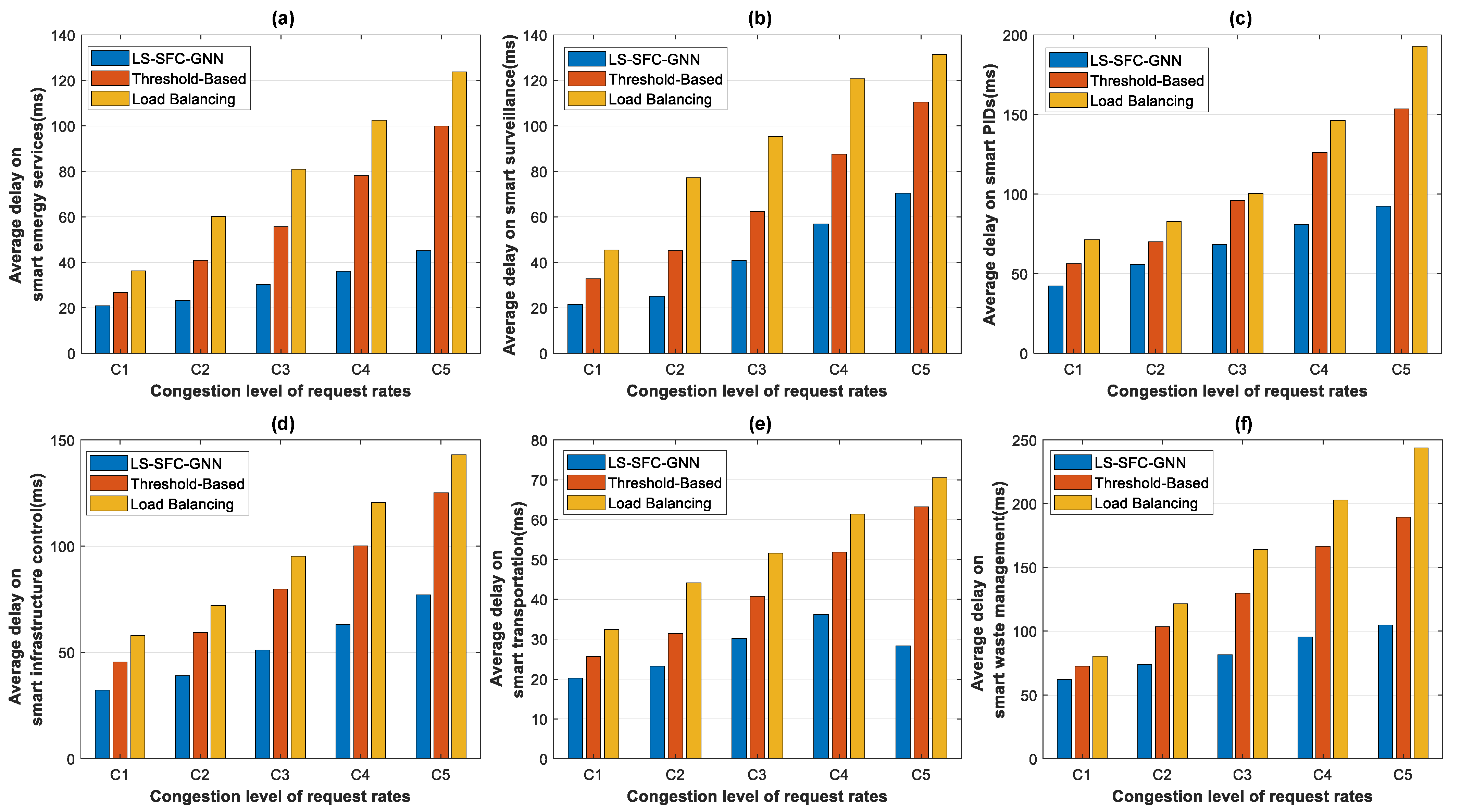
- The average delays of all smart city applications (as shown in Table 1) are observed during a single experiment runtime for a specific use case. Monitoring average delays helps evaluate the responsiveness of the proposed system on how long it takes for each application to deliver the services, compared to the constraint .
- At C1: LS-SFC-GNN gained 0.88% higher completion ratios than load balancing.
- At C2: LS-SFC-GNN achieved 2.63% and 3.62% higher completion than threshold-based and load balancing SFC approaches.
- At C3: LS-SFC-GNN achieved 99.91%, while threshold-based SFC achieved 94.66%, and load balancing SFC achieved 92.88%.
- At C4: LS-SFC-GNN remained at 99.43% by adaptively duplicating critical VNF instances and allocating VM resource pools into an efficient utilization.
- At C5: LS-SFC-GNN outperformed threshold-based and load balancing by 8.43% and 11.29%, respectively.
5. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, Z.; Wu, G.; Ren, H. Multi-Attribute-Based QoS-Aware Virtual Network Function Placement and Service Chaining Algorithms in Smart Cities. Comput. Electr. Eng. 2021, 96, 107465. [Google Scholar] [CrossRef]
- Kim, D.-Y.; Park, J.; Kim, S. Data Transmission in Backscatter IoT Networks for Smart City Applications. J. Sens. 2022, 2022, 4973782. [Google Scholar] [CrossRef]
- Medhat, A.M.; Taleb, T.; Elmangoush, A.; Carella, G.A.; Covaci, S.; Magedanz, T. Service Function Chaining in Next Generation Networks: State of the Art and Research Challenges. IEEE Commun. Mag. 2017, 55, 216–223. [Google Scholar] [CrossRef]
- Sun, G.; Xu, Z.; Yu, H.; Chen, X.; Chang, V.; Vasilakos, A.V. Low-Latency and Resource-Efficient Service Function Chaining Orchestration in Network Function Virtualization. IEEE Internet Things J. 2019, 7, 5760–5772. [Google Scholar] [CrossRef]
- Foukalas, F.; Tziouvaras, A. QoE-Aware Edge Computing through Service Function Chaining. IEEE Internet Comput. 2021, 26, 53–60. [Google Scholar] [CrossRef]
- Chen, J.; Chen, J.; Zhang, H. DRL-QOR: Deep Reinforcement Learning-Based QoS/QoE-Aware Adaptive Online Orchestration in NFV-Enabled Networks. IEEE Trans. Netw. Serv. Manag. 2021, 18, 1758–1774. [Google Scholar] [CrossRef]
- Raza, S.M.; Jeong, H.; Kim, M.; Choo, H. HP-SFC: Hybrid Protection Mechanism Using Source Routing for Service Function Chaining. Appl. Sci. 2021, 11, 5245. [Google Scholar] [CrossRef]
- Zhao, Z.; Fan, X.; Xie, X.; Mao, Q.; Zhao, Q. AP-SDN: Action Program Enabled Software-Defined Networking Architecture. KSII Trans. Internet Inf. Syst. 2023, 17, 1894–1915. [Google Scholar]
- Song, I.; Tam, P.; Kang, S.; Ros, S.; Kim, S. DRL-Based Backbone SDN Control Methods in UAV-Assisted Networks for Computational Resource Efficiency. Electronics 2023, 12, 2984. [Google Scholar] [CrossRef]
- Kim, Y.; Kyung, Y. SWITCH: SDN-WLAN Integrated Handover Scheme for QoS-Guaranteed Mobile Service. KSII Trans. Internet Inf. Syst. 2022, 16, 3680–3693. [Google Scholar]
- Tam, P.; Math, S.; Kim, S. Adaptive Partial Task Offloading and Virtual Resource Placement in SDN/NFV-Based Network Softwarization. Comput. Syst. Sci. Eng. 2023, 45, 2141–2154. [Google Scholar] [CrossRef]
- Sun, M.; Zhang, L.; Mei, J.; Dong, P. Emotion-Aware Task Scheduling for Autonomous Vehicles in Software-Defined Edge Networks. KSII Trans. Internet Inf. Syst. 2022, 16, 3523–3543. [Google Scholar]
- Kim, D.-Y.; Lee, S.; Kim, M.; Kim, S. Edge Cloud Selection in Mobile Edge Computing (MEC)-Aided Applications for Industrial Internet of Things (IIoT) Services. Comput. Syst. Sci. Eng. 2023, 47, 2049–2060. [Google Scholar] [CrossRef]
- Khan, M.T.; Barik, L.; Adholiya, A.; Patra, S.S.; Brahma, A.N.; Barik, R.K. Task Offloading Scheme for Latency Sensitive Tasks in 5G IoHT on Fog Assisted Cloud Computing Environment. In Proceedings of the 2022 3rd International Conference for Emerging Technology (INCET), Belgaum, India, 27–29 May 2022. [Google Scholar]
- Akter, S.; Kim, D.-Y.; Yoon, S. Task Offloading in Multi-Access Edge Computing Enabled UAV-Aided Emergency Response Operations. IEEE Access 2023, 11, 23167–23188. [Google Scholar] [CrossRef]
- Liang, X.; Wu, Y.; Huang, Y.; Ng, D.W.K.; Li, P.; Yao, Y. Performance Optimization and Analysis on P2P Mobile Communication Systems Accelerated by MEC Servers. KSII Trans. Internet Inf. Syst. 2022, 16, 188–210. [Google Scholar]
- Almashhadani, H.A.; Deng, X.; Al-Hwaidi, O.R.; Abdul-Samad, S.T.; Ibrahm, M.M.; Latif, S.N.A. Design of a New Algorithm by Using Standard Deviation Techniques in Multi Edge Computing with IoT Application. KSII Trans. Internet Inf. Syst. 2023, 17, 1147–1161. [Google Scholar]
- Mechtri, M.; Ghribi, C.; Soualah, O.; Zeghlache, D. NFV Orchestration Framework Addressing SFC Challenges. IEEE Commun. Mag. 2017, 55, 16–23. [Google Scholar] [CrossRef]
- Ghaznavi, M.; Shahriar, N.; Kamali, S.; Ahmed, R.; Boutaba, R. Distributed Service Function Chaining. IEEE J. Sel. Areas Commun. 2017, 35, 2479–2489. [Google Scholar] [CrossRef]
- Hawilo, H.; Jammal, M.; Shami, A. Network Function Virtualization-Aware Orchestrator for Service Function Chaining Placement in the Cloud. IEEE J. Sel. Areas Commun. 2019, 37, 643–655. [Google Scholar] [CrossRef]
- Tu, W. Data-Driven QoS and QoE Management in Smart Cities: A Tutorial Study. IEEE Commun. Mag. 2018, 56, 126–133. [Google Scholar] [CrossRef]
- Jin, J.; Gubbi, J.; Luo, T.; Palaniswami, M. Network Architecture and QoS Issues in the Internet of Things for a Smart City. In Proceedings of the 2012 International Symposium on Communications and Information Technologies (ISCIT), Gold Coast, QLD, Australia, 2–5 October 2012. [Google Scholar]
- Kim, T.-H.; Ramos, C.; Mohammed, S. Smart City and IoT. Future Gen. Comput. Syst. 2017, 76, 159–162. [Google Scholar] [CrossRef]
- Arellanes, D.; Lau, K.-K. Evaluating IoT Service Composition Mechanisms for the Scalability of IoT Systems. Future Gen. Comput. Syst. 2020, 108, 827–848. [Google Scholar] [CrossRef]
- Rhayem, A.; Mhiri, M.B.A.; Gargouri, F. Semantic Web Technologies for the Internet of Things: Systematic Literature Review. Internet Things 2020, 11, 100206. [Google Scholar] [CrossRef]
- Neiat, A.; Bouguettaya, A.; Bahutair, M. A Deep Reinforcement Learning Approach for Composing Moving IoT Services. IEEE Trans. Serv. Comput. 2022, 15, 2538–2550. [Google Scholar] [CrossRef]
- AllamehAmiri, M.; Derhami, V.; Ghasemzadeh, M. QoS-Based Web Service Composition Based on Genetic Algorithm. J. AI Data Min. 2013, 1, 63–73. [Google Scholar]
- De Sanctis, M.; Muccini, H.; Vaidhyanathan, K. Data-driven Adaptation in Microservice-based IoT Architectures. In Proceedings of the IEEE International Conference on Software Architecture Companion (ICSA-C) 2020, Salvador, Brazil, 16–20 March 2020; pp. 59–62. [Google Scholar]
- Asghari, P.; Amir, M.R.; Hamid, H.S.J. Service Composition Approaches in IoT: A Systematic Review. J. Netw. Comput. Appl. 2018, 120, 61–77. [Google Scholar] [CrossRef]
- 3GPP TS 23.203 V17.2.0; Technical Specification Group Services and System Aspects; Policy and Charging Control Architecture. ETSI: Valbonne, France, 2021.
- Khan, M.T.; Adholiya, A. Machine Learning-Based Application for Predicting 5G/B5G Service. In Proceedings of the 2023 13th International Conference on Cloud Computing, Data Science & Engineering (Confluence), Noida, India, 19–20 January 2023. [Google Scholar]
- Zou, D.; Sun, G.; Li, Z.; Xi, G.; Wang, L. Incremental Strategy-based Residual Regression Networks for Node Localization in Wireless Sensor Networks. KSII Trans. Internet Inf. Syst. 2022, 16, 2627–2647. [Google Scholar]
- Zhou, F.; Yu, P.; Feng, L.; Qiu, X.; Wang, Z.; Meng, L.; Kadoch, M.; Gong, L.; Yao, X. Automatic Network Slicing for IoT in Smart City. IEEE Wirel. Commun. 2020, 27, 108–115. [Google Scholar] [CrossRef]
- Kirimtat, A.; Krejcar, O.; Kertesz, A.; Tasgetiren, M.F. Future Trends and Current State of Smart City Concepts: A Survey. IEEE Access 2020, 8, 86448–86467. [Google Scholar] [CrossRef]
- Kipf, T.N.; Welling, M. Semi-Supervised Classification with Graph Convolutional Networks. arXiv 2017, arXiv:1609.02907. [Google Scholar]
- Wu, Z.; Pan, S.; Chen, F.; Long, G.; Zhang, C.; Yu, P.S. A Comprehensive Survey on Graph Neural Networks. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 4–24. [Google Scholar] [CrossRef] [PubMed]
- Tam, P.; Song, I.; Kang, S.; Ros, S.; Kim, S. Graph Neural Networks for Intelligent Modelling in Network Management and Orchestration: A Survey on Communications. Electronics 2022, 11, 3371. [Google Scholar] [CrossRef]
- Heo, D.; Lange, S.; Kim, H.-G.; Choi, H. Graph Neural Network Based Service Function Chaining for Automatic Network Control. In proceeding of the 2020 21st Asia-Pacific Network Operations and Management Symposium (APNOMS), Daegu, Republic of Korea, 22–25 September 2020. [Google Scholar]
- Rafiq, A.; Khan, T.A.; Afaq, M.; Song, W.-C. Service Function Chaining and Traffic Steering in SDN Using Graph Neural Network. In Proceedings of the 2020 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Republic of Korea, 21–23 October 2020. [Google Scholar]
- Rusek, K.; Suarez-Varela, J.; Almasan, P.; Barlet-Ros, P.; Cabellos-Aparicio, A. RouteNet: Leveraging Graph Neural Networks for Network Modeling and Optimization in SDN. IEEE J. Sel. Areas Commun. 2020, 38, 2260–2270. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| QCI-Index | Resource Type | Priority Level | PDB | PELR | Smart City Examples |
|---|---|---|---|---|---|
| QCI 1 (Conversational Voice) | GBR | 2 | 100 ms | 10−2 | Smart Emergency Services |
| QCI 2 (Conversational Video) | 3 | 150 ms | 10−3 | Smart Surveillance | |
| QCI 4 (Buffered Streaming) | 5 | 300 ms | 10−6 | Smart PIDs | |
| QCI 70 (Mission Critical Data) | Non-GBR | 5.5 | 200 ms | 10−6 | Smart Infrastructure Control |
| QCI 79 (V2X messages) | 6.5 | 50 ms | 10−2 | Smart Transportation | |
| QCI 9 (Background) | 9 | 300 ms | 10−6 | Smart Waste Management |
| Notation | Description |
|---|---|
| A set of smart city services | |
| The flow of a particular service- that has a VNFFG with set of VNFs | |
| Graph of physical nodes , links , and VNF instances | |
| , , | Upper-bound capacities of physical node- (CPU, memory, disk) |
| , , | Allocated capacities for VNF- in node- (CPU, memory, disk) |
| , | Upper-bound and allocated resource capacities |
| , , | Required capacities for VNF- in service- (CPU, memory, disk) |
| Required resource capacities | |
| Decision variable to host VNF- instance in physical node- | |
| Decision variable to place VNF- in SFC of service- | |
| , , | Delays on link, physical node, and VNF instances |
| Upper-bound tolerable delays of service- | |
| Availability statuses of VNF- instances | |
| Loading congestion statuses of VNF- instances | |
| Current loading status of VNF- | |
| Operating status of VNF-(whether the instance is currently operational or standby) | |
| Link bandwidth requirement for service- | |
| Status of link placement between physical nodes | |
| , | (1) Total computation and (2) communication delays of service- |
| Use Case | ISF | Bandwidth (Mbps) | vCPU | RAM (GB) | Replication VMs |
|---|---|---|---|---|---|
| Smart Emergency Services | Emergency call or data handling | 100 | 4 | 8 | 3 |
| Action modeling and recommendation | 50 | 2 | 4 | 5 | |
| Resource dispatch | 80 | 3 | 6 | 3 | |
| Emergency response coordination | 120 | 5 | 10 | 2 | |
| Smart Surveillance | Object Detection | 150 | 6 | 12 | 5 |
| Video Streaming | 200 | 8 | 16 | 3 | |
| Anomaly Detection | 100 | 4 | 8 | 2 | |
| Facial Recognition | 80 | 3 | 6 | 2 | |
| Smart PIDs | API for data aggregation | 100 | 4 | 8 | 3 |
| Content scheduling | 50 | 2 | 4 | 4 | |
| Real-time data feeds | 120 | 5 | 10 | 3 | |
| Display analytics | 80 | 3 | 6 | 4 | |
| Smart Infrastructure Control | API for data aggregation | 120 | 6 | 12 | 2 |
| Real-time analytics and detection | 150 | 6 | 12 | 5 | |
| Command settings | 80 | 3 | 6 | 3 | |
| Predictive maintenance | 120 | 5 | 10 | 2 | |
| Smart Transportation | Vehicle state gathering | 100 | 4 | 8 | 5 |
| Traffic prediction | 100 | 4 | 8 | 2 | |
| Route optimization | 120 | 5 | 10 | 3 | |
| Policy-making | 80 | 3 | 6 | 2 | |
| Smart Waste Management | API for data aggregation | 100 | 4 | 8 | 3 |
| Waste collection scheduling | 60 | 3 | 6 | 4 | |
| Driving route planning | 100 | 5 | 10 | 3 | |
| Environment impact evaluation | 70 | 4 | 8 | 3 |
| Parameter | Specifications |
|---|---|
| Hosting infrastructure | Intel(R) Xeon(R) Silver 4280 CPU @ 2.10 GHz, 128 GB, NVIDIA Quadro RTX 4000 GPU |
| Maximum tolerable delay per ISF (post-train) | 5 ms to 15 ms |
| SFC request rate | 100/s to 1000/s |
| Number of VNFs in a single chain | 4 |
| Delay on links | ≤2 ms |
| Simulation timeslot | 2000- (5 congestion-level) |
| GNN platform | Python (Pytorch) |
| Learning Rate | 0.01 |
| Batch Size | 64 |
| Number of Epochs | 1000 |
| Dropout Rate | 0.3 |
| Activation Function | ReLU and Sigmoid |
| Use Case | Congestion Level | LS-SFC-GNN | Threshold-Based | Load Balancing |
|---|---|---|---|---|
| Smart Emergency Services | C1 | 20.92 | 26.78 | 36.32 |
| C2 | 23.23 | 40.91 | 60.12 | |
| C3 | 30.18 | 55.72 | 80.91 | |
| C4 | 36.17 | 78.14 | 102.56 | |
| C5 | 45.13 | 100.01 | 123.75 | |
| Smart Surveillance | C1 | 21.43 | 32.81 | 45.45 |
| C2 | 25.12 | 45.12 | 77.23 | |
| C3 | 40.76 | 62.23 | 95.32 | |
| C4 | 56.91 | 87.55 | 120.66 | |
| C5 | 70.43 | 110.51 | 131.43 | |
| Smart PIDs | C1 | 42.31 | 56.23 | 71.29 |
| C2 | 55.83 | 70.04 | 82.66 | |
| C3 | 68.44 | 96.03 | 100.43 | |
| C4 | 81.03 | 126.21 | 146.12 | |
| C5 | 92.55 | 153.49 | 192.88 | |
| Smart Infrastructure Control | C1 | 32.31 | 45.45 | 57.82 |
| C2 | 39.21 | 59.36 | 72.12 | |
| C3 | 51.08 | 79.87 | 95.32 | |
| C4 | 63.22 | 100.13 | 120.67 | |
| C5 | 77.01 | 125.12 | 143.09 | |
| Smart Transportation | C1 | 20.23 | 25.61 | 32.43 |
| C2 | 23.23 | 31.34 | 44.09 | |
| C3 | 30.18 | 40.76 | 51.56 | |
| C4 | 36.17 | 51.87 | 61.44 | |
| C5 | 28.31 | 63.21 | 70.53 | |
| Smart Waste Management | C1 | 62.31 | 72.43 | 80.23 |
| C2 | 73.74 | 103.53 | 121.45 | |
| C3 | 81.34 | 129.84 | 164.32 | |
| C4 | 95.33 | 166.49 | 202.83 | |
| C5 | 104.63 | 189.51 | 243.77 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tam, P.; Kang, S.; Ros, S.; Song, I.; Kim, S. Large-Scale Service Function Chaining Management and Orchestration in Smart City. Electronics 2023, 12, 4018. https://doi.org/10.3390/electronics12194018
Tam P, Kang S, Ros S, Song I, Kim S. Large-Scale Service Function Chaining Management and Orchestration in Smart City. Electronics. 2023; 12(19):4018. https://doi.org/10.3390/electronics12194018
Chicago/Turabian StyleTam, Prohim, Seungwoo Kang, Seyha Ros, Inseok Song, and Seokhoon Kim. 2023. "Large-Scale Service Function Chaining Management and Orchestration in Smart City" Electronics 12, no. 19: 4018. https://doi.org/10.3390/electronics12194018
APA StyleTam, P., Kang, S., Ros, S., Song, I., & Kim, S. (2023). Large-Scale Service Function Chaining Management and Orchestration in Smart City. Electronics, 12(19), 4018. https://doi.org/10.3390/electronics12194018