

Empowering Accessibility: BLE Beacon-Based IoT Localization

 , and
, and
Abstract
:1. Introduction
1.1. Indoor IoT Localization
1.2. Investigation Assumptions
- It has to be compatible with iOS and Android systems—unfortunately, most beacons are compatible with only one system, and often, such information is not disclosed in the manufacturers’ specifications;
- It can be placed both inside and outside buildings—suitable waterproof and vandal-proof housing has to be provided for adequate protection;
- It should feature an easily replaceable battery and facilitate the maintenance process;
- It should integrate an intelligent transmitter—the ability to adjust the level of emitted power and the interval of transmitted signals can significantly prolong the operational lifespan;
- SDK (Software Development Kit) libraries for the Android and iOS operating systems should be available.
2. Characteristics of Major Components
2.1. Characteristic of Used Beacons
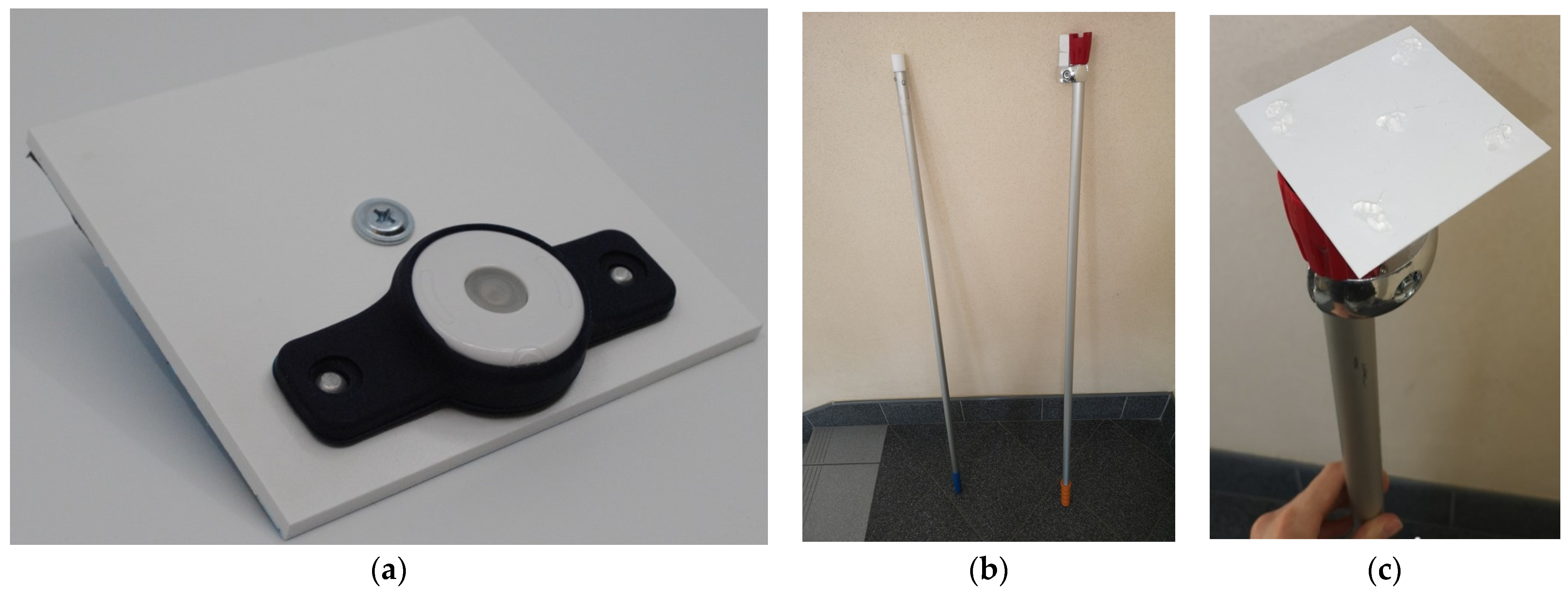
2.2. Beacons Assembly in University Campus
3. Preliminary Investigations
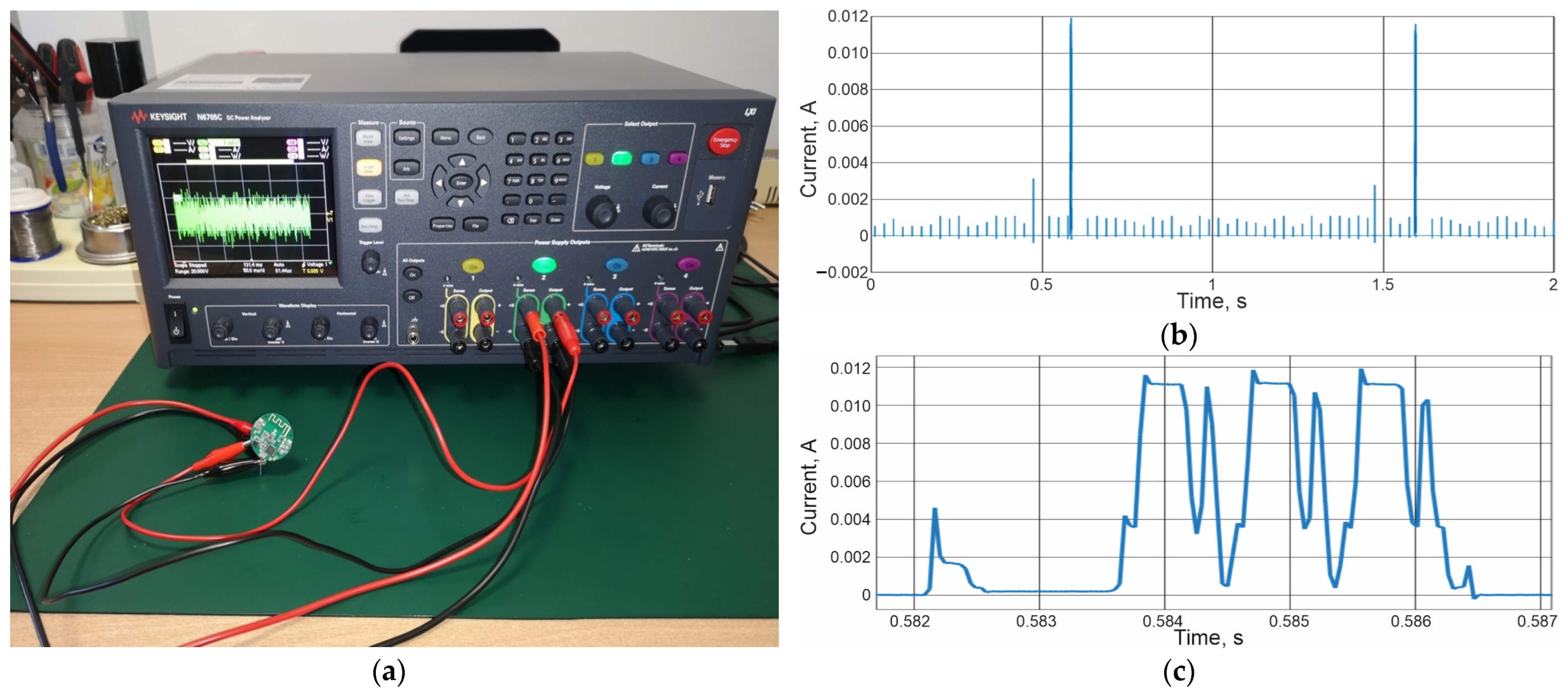
3.1. Device Operating Time
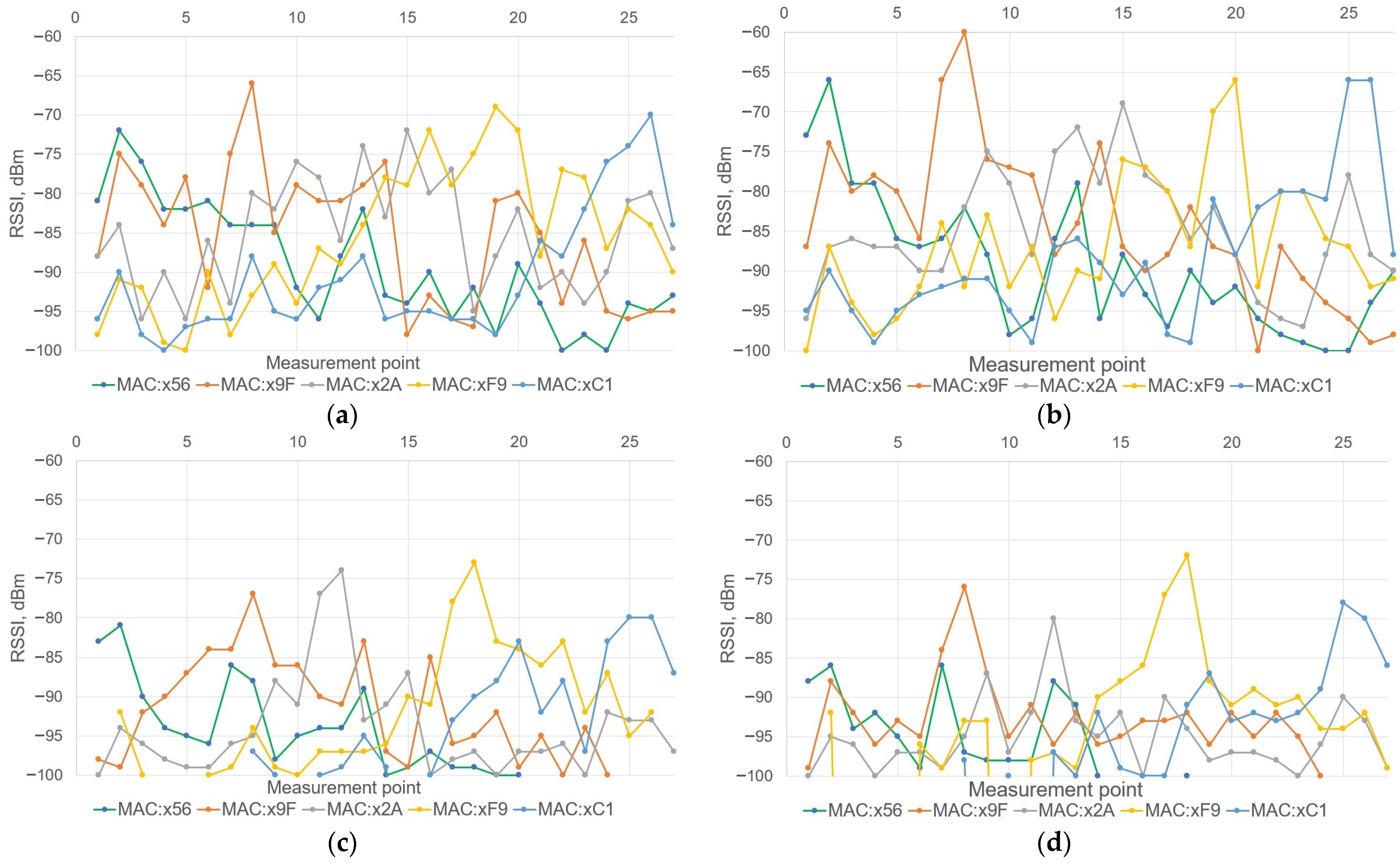
3.2. Indoor Signal Strength Measurement
3.3. Node Network Signal Strength Measurement
3.4. Signal Strength Measurement in Stairwell Scenario
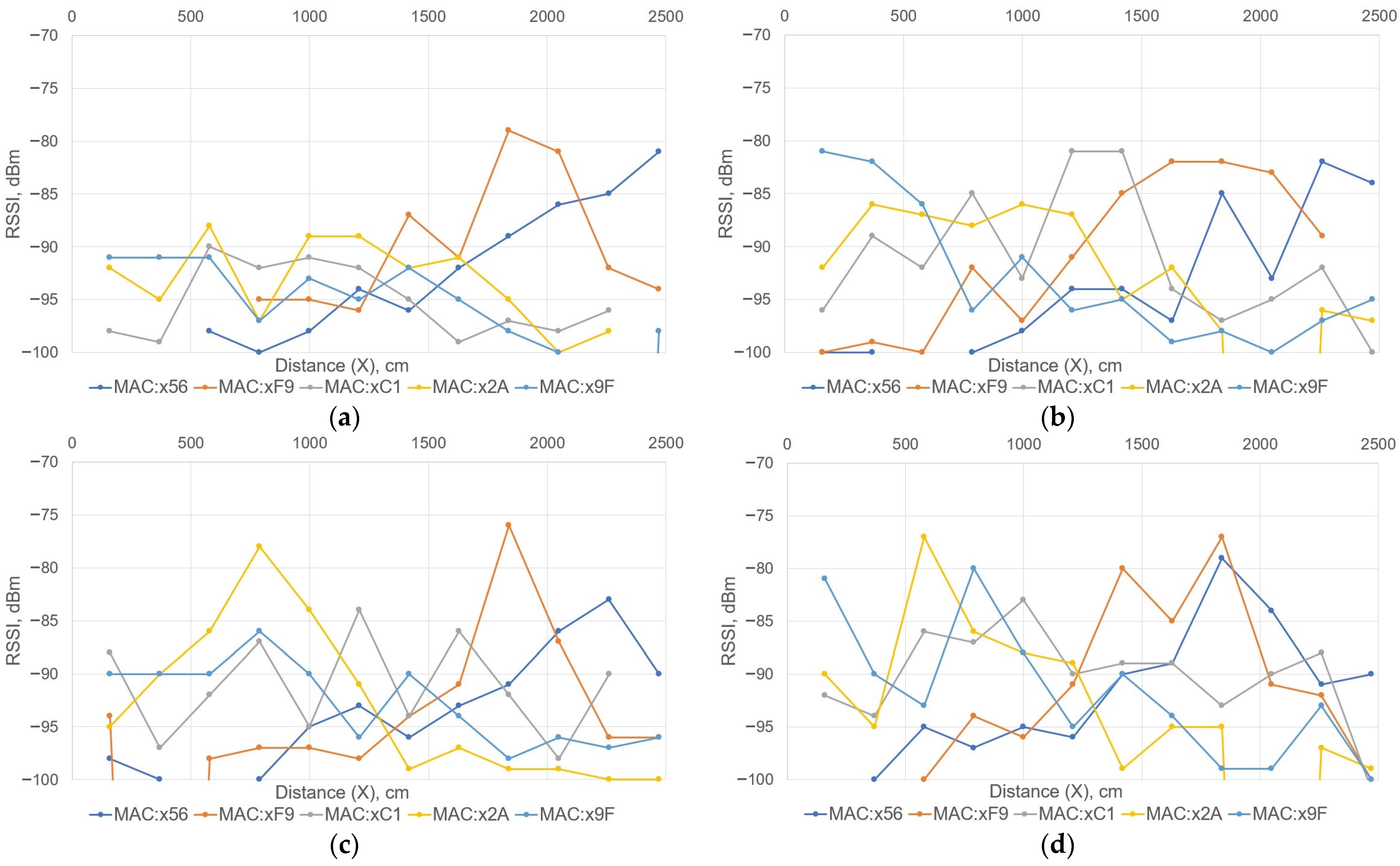
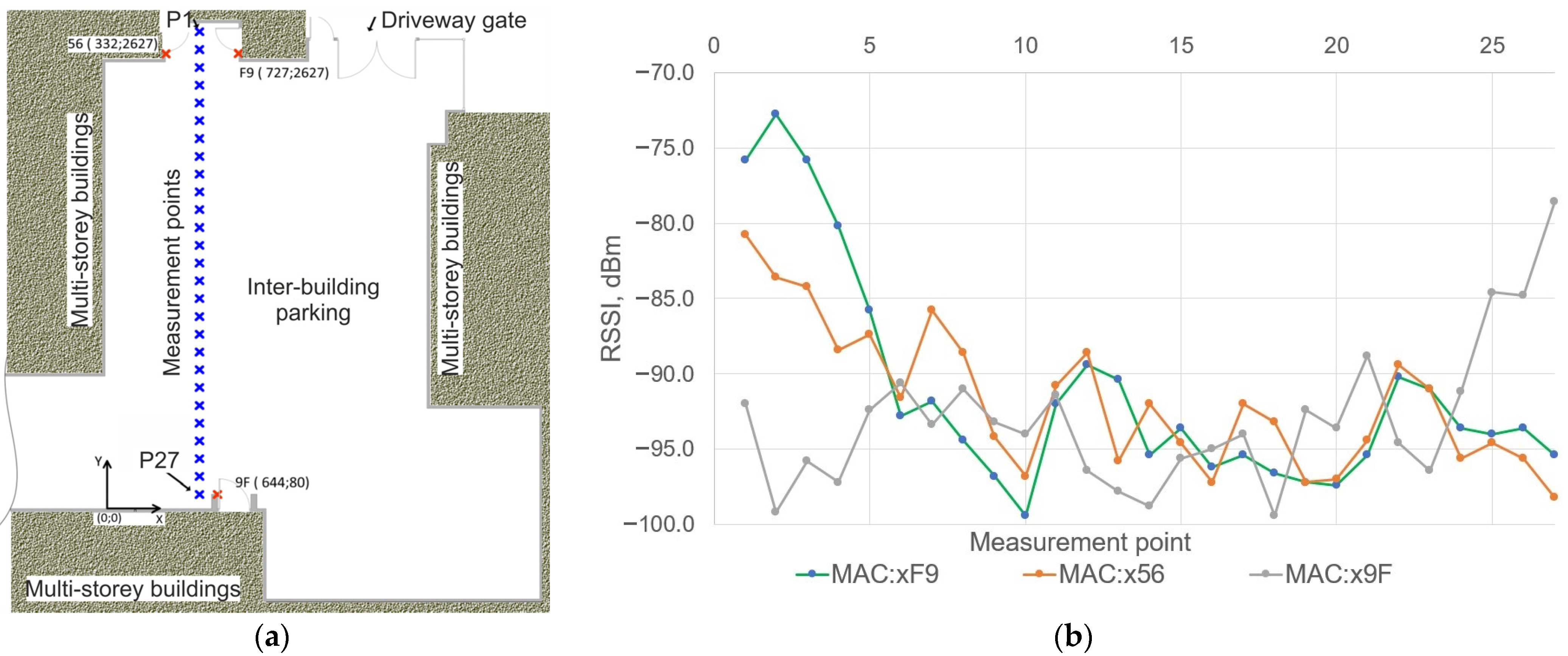
3.5. Outdoor Signal Strength Measurement
4. System Implementation
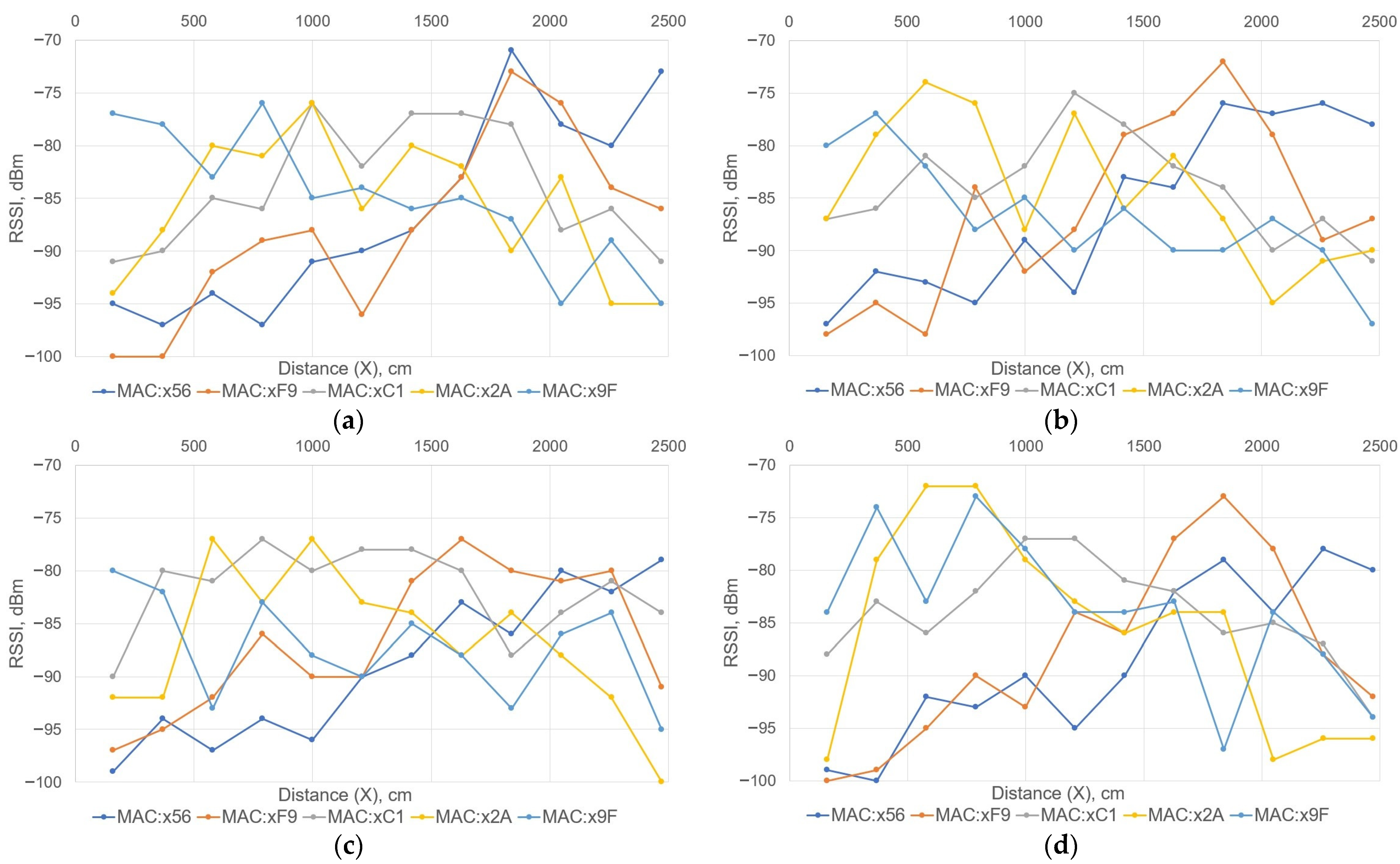
4.1. Beacons Positioned Directly above Room Doors
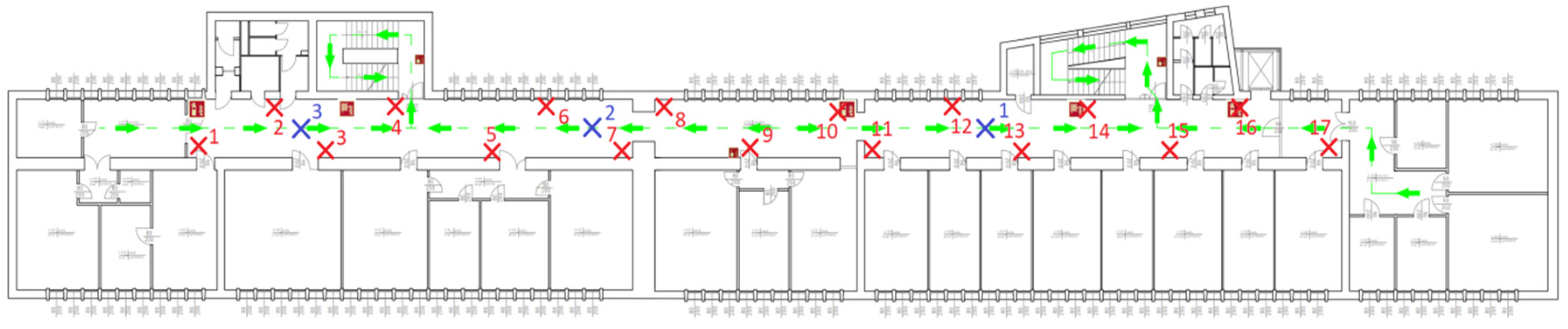
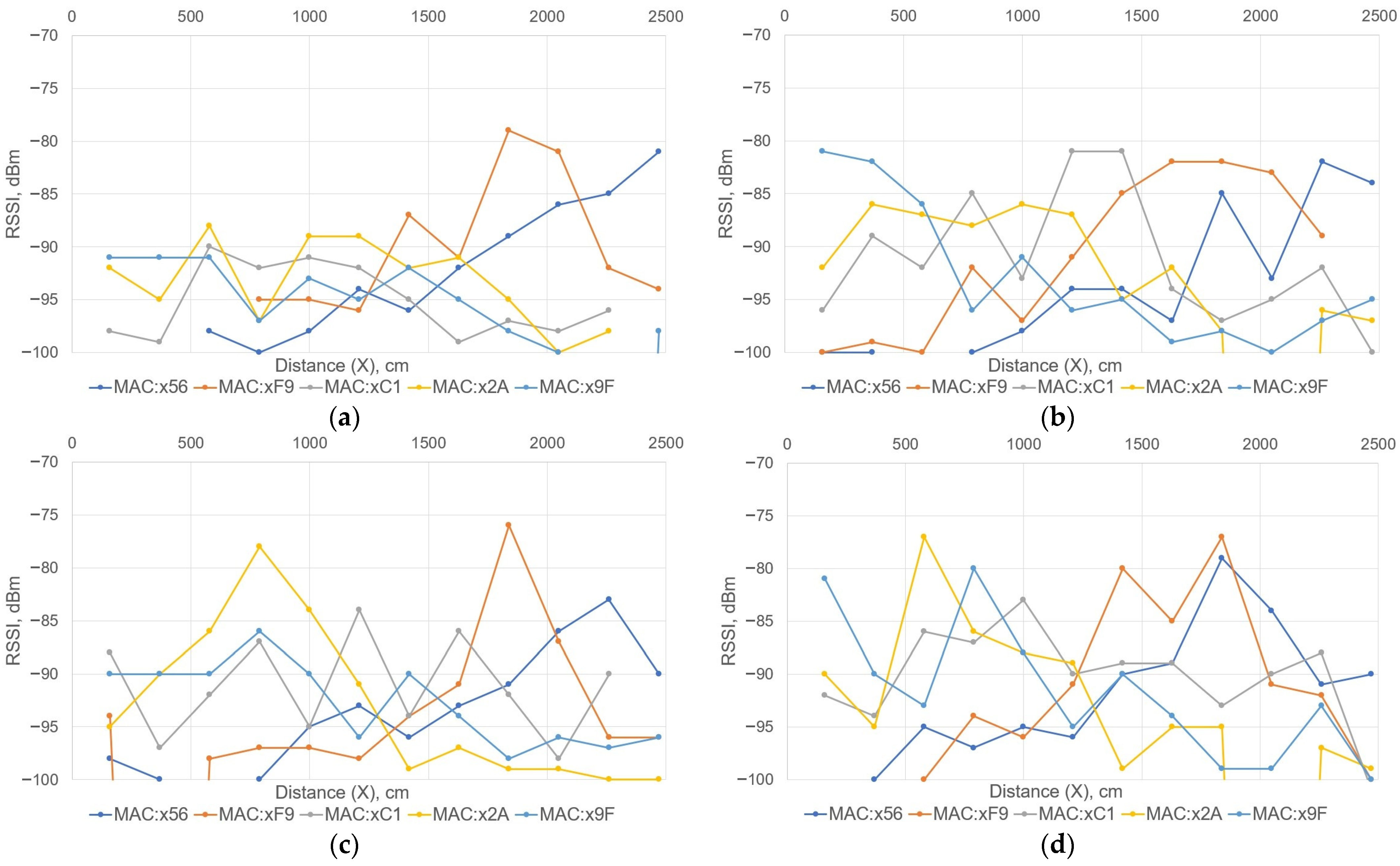
4.2. Beacons Evenly Positioned along the Hall
4.3. Summary of Application Tests
5. Discussion
- Diversity in the construction of receiver devices/mobile phones (various designs of internal antennas, diversified location of antennas within casings, different orientations in relation to beacons’ antenna) makes assessing the predictability of system operation more challenging;
- RSSI values of received signals at a given moment strongly depend on the current orientation of the receiving antenna relative to the transmitting antennas;
- Variability in propagation characteristics within the environment is influenced by numerous factors, such as topographic and material properties specific to the IoT localization space, nature of propagation, presence of obstacles, speed and direction of object movement, presence and number of users in the given area;
- The manner in which beacons are installed and the proximity of materials and obstacles may modify the telecommunication and propagation characteristics of transmitters;
- Disturbances and signal interferences, common within the frequency band used in the BLE standard, diminish the effectiveness of the localization process;
- Setting the transmitter’s minimum power reduces battery consumption but also limits the signal range (e.g., to approximately 10 m, as in the experiment);
- Setting the transmitter’s maximum power significantly enhances signal stability and range (e.g., extending beyond 20 m), reduces the number of required installed devices, improves location accuracy, etc.; however, it substantially reduces battery life and even impedes accurate localization in scenarios where beacons are placed above doors.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Obeidat, H.; Shuaieb, W.; Obeidat, O.; Abd-Alhameed, R. A Review of Indoor Localization Techniques and Wireless Technologies. Wirel. Pers. Commun. 2021, 119, 289–327. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M.; Camarinha-Matos, L.M.; Oliveira, L.B. Distributed Localization with Complemented RSS and AOA Measurements: Theory and Methods. Appl. Sci. 2019, 10, 272. [Google Scholar] [CrossRef]
- Jérémy, R.; Karell, B.; Cyril, F. Ble Based Indoor Positioning System and Minimal Zone Searching Algorithm (MZS) Applied to Visitor Trajectories within a Museum. Appl. Sci. 2021, 11, 6107. [Google Scholar] [CrossRef]
- Shit, R.C.; Sharma, S.; Puthal, D.; Zomaya, A.Y. Location of Things (LoT): A Review and Taxonomy of Sensors Localization in IoT Infrastructure. IEEE Commun. Surv. Tutor. 2018, 20, 2028–2061. [Google Scholar] [CrossRef]
- Pinto, B.H.O.; de Oliveira, H.A.; Souto, E.J. Factor Optimization for the Design of Indoor Positioning Systems Using a Probability-Based Algorithm. J. Sens. Actuator Netw. 2021, 10, 16. [Google Scholar] [CrossRef]
- Subedi, S.; Pyun, J.-Y. A Survey of Smartphone-Based Indoor Positioning System Using RF-Based Wireless Technologies. Sensors 2020, 20, 7230. [Google Scholar] [CrossRef]
- Priya, D.; Suchitra, V. Localization of Indoor Mobile Networking. Int. J. Eng. Res. Technol. 2020, 8, 146–150. [Google Scholar]
- Fujinami, K. On-Body Smartphone Localization with an Accelerometer. Information 2016, 7, 21. [Google Scholar] [CrossRef]
- Rodríguez, G.; Casado, F.; Iglesias, R.; Regueiro, C.; Nieto, A. Robust Step Counting for Inertial Navigation with Mobile Phones. Sensors 2018, 18, 3157. [Google Scholar] [CrossRef]
- Sadowski, S.; Spachos, P. RSSI-Based Indoor Localization with the Internet of Things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]
- Zhang, Y.; Gong, X.; Liu, K.; Zhang, S. Localization and Tracking of an Indoor Autonomous Vehicle Based on the Phase Difference of Passive UHF RFID Signals. Sensors 2021, 21, 3286. [Google Scholar] [CrossRef] [PubMed]
- Spachos, P.; Plataniotis, K.N. BLE Beacons for Indoor Positioning at an Interactive IoT-Based Smart Museum. IEEE Syst. J. 2020, 14, 3483–3493. [Google Scholar] [CrossRef]
- Diallo, A.; Lu, Z.; Zhao, X. Wireless Indoor Localization Using Passive RFID Tags. Procedia Comput. Sci. 2019, 155, 210–217. [Google Scholar] [CrossRef]
- Tan, P.; Tsinakwadi, T.H.; Xu, Z.; Xu, H. Sing-Ant: RFID Indoor Positioning System Using Single Antenna with Multiple Beams Based on LANDMARC Algorithm. Appl. Sci. 2022, 12, 6751. [Google Scholar] [CrossRef]
- Albraheem, L.; Alawad, S. A Hybrid Indoor Positioning System Based on Visible Light Communication and Bluetooth RSS Trilateration. Sensors 2023, 23, 7199. [Google Scholar] [CrossRef]
- Chuku, N.; Nasipuri, A. RSSI-Based Localization Schemes for Wireless Sensor Networks Using Outlier Detection. J. Sens. Actuator Netw. 2021, 10, 10. [Google Scholar] [CrossRef]
- Huang, K.; He, K.; Du, X. A Hybrid Method to Improve the BLE-Based Indoor Positioning in a Dense Bluetooth Environment. Sensors 2019, 19, 424. [Google Scholar] [CrossRef]
- Minea, M.; Dumitrescu, C.; Costea, I.M.; Chiva, I.C.; Semenescu, A. Developing a Solution for Mobility and Distribution Analysis Based on Bluetooth and Artificial Intelligence. Sensors 2020, 20, 7327. [Google Scholar] [CrossRef]
- Huang, B.; Liu, J.; Sun, W.; Yang, F. A Robust Indoor Positioning Method Based on Bluetooth Low Energy with Separate Channel Information. Sensors 2019, 19, 3487. [Google Scholar] [CrossRef]
- Subedi, S.; Pyun, J.-Y. Practical Fingerprinting Localization for Indoor Positioning System by Using Beacons. J. Sens. 2017, 2017, 9742170. [Google Scholar] [CrossRef]
- Ruan, L.; Zhang, L.; Zhou, T.; Long, Y. An Improved Bluetooth Indoor Positioning Method Using Dynamic Fingerprint Window. Sensors 2020, 20, 7269. [Google Scholar] [CrossRef] [PubMed]
- Khan, I.M.; Thompson, A.; Al-Hourani, A.; Sithamparanathan, K.; Rowe, W.S.T. RSSI and Device Pose Fusion for Fingerprinting-Based Indoor Smartphone Localization Systems. Future Internet 2023, 15, 220. [Google Scholar] [CrossRef]
- Szyc, K.; Nikodem, M.; Zdunek, M. Bluetooth Low Energy Indoor Localization for Large Industrial Areas and Limited Infrastructure. Ad Hoc Netw. 2023, 139, 103024. [Google Scholar] [CrossRef]
- Fares, M.H.; Moradi, H.; Shahabadi, M.; Mohanna, Y. Beacon-Based Approach for Target Localization in NLOS Condition for N-Bounce Reflections. In Proceedings of the 2021 IEEE 4th International Conference on Computing, Power and Communication Technologies (GUCON), Kuala Lumpur, Malaysia, 24–26 September 2021; pp. 1–6. [Google Scholar]
- Bilbao-Jayo, A.; Almeida, A.; Sergi, I.; Montanaro, T.; Fasano, L.; Emaldi, M.; Patrono, L. Behavior Modeling for a Beacon-Based Indoor Location System. Sensors 2021, 21, 4839. [Google Scholar] [CrossRef]
- García-Paterna, P.J.; Martínez-Sala, A.S.; Sánchez-Aarnoutse, J.C. Empirical Study of a Room-Level Localization System Based on Bluetooth Low Energy Beacons. Sensors 2021, 21, 3665. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chipset | nRF51822 | nRF52832 | CC254x | CC2640 | nRF52810 |
|---|---|---|---|---|---|
| Nordic | Nordic | TI | TI | Nordic | |
| BLE | 4.0 | 5.0 | 4.0 | 5.0 | 5.0 |
| Power supply | 2.0–3.3 V | 2.0–3.3 V | 2.0–3.3 V | 1.8–3.8 V | 1.7–3.6 V |
| Output power | 4 dBm | 4 dBm | 0 dBm | 5 dBm | 4 dBm |
| Transmission interval | 1 s (adjustable) | 1 s (adjustable) | 1 s (adjustable) | 1 s (adjustable) | 0.1 s |
| Current of transmitter | 13 mA | 13 mA | 24 mA | 9.1 mA | 7.5 mA |
| Average current | 50 μA | 50 μA | 80 μA | 40 μA | - |
| Standby current | 3.1 μA | 3.1 μA | 3.1 μA | 1 μA | 1.8 μA |
| Operating distance | >50 m | >50 m | >50 m | >60 m | <200 m |
| Parameter | YJ-15044 | GT-DKBY-BLE |
|---|---|---|
| Supported standards | iBeacon, Eddystone | Apple iBeacon, Google Eddystone |
| Supported mobile system | Apple Beacon Standard, iOS from 7.0, Android from 4.3 | iOS from 7.0, Android from 4.3 |
| Replaceable battery | CR2477, 3 V/1000 mAh | CR2032, 3 V/235 mAh |
| Load current | 50 µA (@ 4 dBm, 0.5 s interval) | Not specified |
| Rx range | Up to 100 m | Up to 200 m |
| Tx range | Up to 60 m | Up to 90 m |
| Antenna | PCB | PCB |
| Output power | max 4 dBm | max 4 dBm |
| Transmission power | Adjustable from −30 to 4 dBm | Four levels: −23 dBm, −6 dBm, 0 dBm, 4 dBm |
| IDLE power/current | 12 µW/2 µA | Not specified |
| Operating voltage | 1.8–3.6 V | 1.7–3.6 V |
| Transmission interval | Adjustable from 0.1 to 2 s | Adjustable from 0.1 to 10 s |
| Sensors | Lack | Temperature, humidity, and acceleration sensors are accessible |
| Operating time | 12–24 month (depending on output power and time interval) | 12 month @ −6 dBm and 1 s interval |
| Temperature range | −40–105 °C | Operating: −15–45 °C Storage: −15–50 °C |
| Ingress protection | Waterproof | IP67 |
| Casing | Round plastic enclosure closed with three screws | Polycarbonate snap-closure case with variety of modified outer parts |
| Mounting method | Requires an additional enclosure enabling surface mounting | Enclosure ready for mounting on any surface using, e.g., screws, additionally equipped with double-sided adhesive tape |
| Function button | Programmable | On/Off |
| Device status | LED | Two-color LED |
| Signal Power | |||||||
| −23 dBm | −6 dBm | ||||||
| Imax, μA | Iav, μA | bl, h | Imax, μA | Iav, μA | bl, h | ||
| Time interval | 0.2 s | 11,777 | 74.8 | 3142 | 11,594 | 82.8 | 2838 |
| 1 s | 11,774 | 18.8 | 12,500 | 11,689 | 20.7 | 11,353 | |
| 2 s | 11,775 | 11.7 | 20,085 | 11,871 | 12.6 | 18,651 | |
| 4 s | 11,654 | 8.2 | 28,659 | 11,713 | 8.7 | 27,011 | |
| Signal Power | |||||||
| 0 dBm | 4 dBm | ||||||
| Imax, μA | Iav, μA | bl, h | Imax, μA | Iav, μA | bl, h | ||
| Time interval | 0.2 s | 12,846 | 112.6 | 2087 | 18,319 | 154.5 | 1521 |
| 1 s | 12,429 | 28.2 | 8333 | 18,115 | 29.8 | 7886 | |
| 2 s | 12,817 | 15.6 | 15,064 | 18,437 | 19.6 | 11,990 | |
| 4 s | 12,765 | 10.5 | 22,381 | 18,353 | 11.4 | 20,614 | |
| Orientation of Mobile Phone/ Output Power in Transmitter | Two Last Digits of Beacons’ MAC | ||||
|---|---|---|---|---|---|
| 56 | f9 | c1 | 2a | 9f | |
| RSSI Factor, dBm | |||||
| Phone horizontally/0 dBm | −97 | - | −88 | −87 | −99 |
| Phone vertically/0 dBm | −91 | - | −88 | −85 | −99 |
| Phone horizontally/−6 dBm | - | - | - | −99 | −100 |
| Phone vertically/−6 dBm | - | - | −99 | −89 | −90 |
| Orientation of Mobile Phone/ Output Power in Transmitter | Measurement Point/ Distance From Door, cm | Two Last Digits of Beacons’ MAC | ||||
|---|---|---|---|---|---|---|
| 56′ | f9 | c1 | 2a | 9f | ||
| RSSI Factor, dBm | ||||||
| Phone horizontally/0 dBm | P2/100 cm | −81 | −100 | −99 | −94 | −93 |
| Phone vertically/0 dBm | −75 | −95 | −95 | −96 | −100 | |
| Phone horizontally/0 dBm | P3/200 cm | −77 | −98 | −100 | −94 | −98 |
| Phone vertically/0 dBm | −77 | −95 | −90 | −97 | −97 | |
| Phone horizontally/0 dBm | P4/300 cm | −87 | - | −94 | −92 | −97 |
| Phone vertically/0 dBm | −76 | −100 | −100 | −92 | −97 | |
| Phone horizontally/−6 dBm | P2/100 cm | −88 | −99 | −98 | −100 | −92 |
| Phone vertically/−6 dBm | −88 | - | −99 | - | −98 | |
| Phone horizontally/−6 dBm | P3/200 cm | −88 | −100 | −99 | - | −92 |
| Phone vertically/−6 dBm | −86 | - | −99 | - | −97 | |
| Phone horizontally/−6 dBm | P4/300 cm | −86 | - | - | - | −93 |
| Phone vertically/−6 dBm | −89 | - | −100 | - | −93 | |
| Test Point | 1 | 2 | 3 | |
|---|---|---|---|---|
| No. | Beacons’ MAC | RSSI, dBm | RSSI, dBm | RSSI, dBm |
| 1 | MAC:x0A | −88 | ||
| 2 | MAC:xDD | −85 | ||
| 3 | MAC:x10 | −88 | ||
| 4 | MAC:x0B | −88 | ||
| 5 | MAC:xDB | −90 | ||
| 6 | MAC:x23 | −88 | ||
| 7 | MAC:x09 | −82 | ||
| 8 | MAC:x73 | −65 | −86 | |
| 9 | MAC:xDE | −78 | −80 | |
| 11 | MAC:x49 | −73 | −75 | −91 |
| 12 | MAC:x20 | −85 | −52 | −79 |
| 13 | MAC:xFE | −84 | −57 | −85 |
| 14 | MAC:xB3 | −90 | −71 | −80 |
| 15 | MAC:x42 | −87 | −72 | −70 |
| 16 | MAC:xD7 | −90 | −75 | −53 |
| 17 | MAC:x4C | −88 | −76 | −68 |
| 18 | MAC:x3E | −87 | −83 | |
| 19 | MAC:x8A | −78 | −62 | |
| 20 | MAC:x46 | −84 | −60 | |
| 21 | MAC:xFA | −86 | −79 | −68 |
| 22 | MAC:x4E | −72 | −87 | |
| 23 | MAC:xF1 | −59 | ||
| 24 | MAC:x99 | −78 | ||
| 25 | MAC:xD9 | −76 | −89 | |
| 26 | MAC:xD5 | −82 |
| Test Point | 1 | 2 | 3 | |
|---|---|---|---|---|
| No. | MAC | RSSI, dBm | RSSI, dBm | RSSI, dBm |
| 1 | MAC:x59 | −89 | −75 | −74 |
| 2 | MAC:x4E | −89 | −75 | −61 |
| 3 | MAC:xFB | −65 | −80 | |
| 4 | MAC:x17 | −68 | −78 | |
| 5 | MAC:x4B | −84 | −67 | −81 |
| 6 | MAC:x7E | −59 | −71 | |
| 7 | MAC:xEB | −62 | −83 | |
| 8 | MAC:xF4 | −83 | −81 | −90 |
| 9 | MAC:xE3 | −73 | −83 | −89 |
| 10 | MAC:x8E | −78 | −87 | −87 |
| 11 | MAC:x8A | −62 | −88 | −87 |
| 12 | MAC:x01 | −81 | −87 | |
| 13 | MAC:x4A | −68 | −90 | |
| 14 | MAC:x15 | −83 | −89 | |
| 15 | MAC:xFD | −76 | −87 | |
| 16 | MAC:x39 | −83 | ||
| 17 | MAC:x35 | −83 | −90 | −87 |
| Feature | Case I: Beacons Positioned Directly Above Room Doors | Case II: Beacons Evenly Positioned Along the Hall |
|---|---|---|
| Estimating distance indoors | Simple localization algorithm Signal strength increases as user approaches desired door | Calculation of user’s position across entire zone by using navigation algorithms Distance from door has to be calculated each time based on several received RSSI signals |
| Difficulties in setting up network nodes | Simple identification of location for beacon installation | IoT space should be evenly covered by beacons while adhering to estimated distance range (6–10 m) Node network has to be replicated on virtual map |
| Uniformity in covering IoT space with signals | Significant non-uniformity Signal strength is highest at doors | Uniform coverage with signals Signals are received from at least three beacons everywhere |
| Localization coverage | Where there are no doors, there are no beacons, there are no signals, and then user’s position is unknown | Entire localization space is marked with nodes Signals are available from at least three transmitters |
| Similar RSSI values for different nodes | This case is when doors are close to each other More advanced localization algorithms add complexity to software’s simplicity | This case is only at borders of beacon zones This case does not present any unusual challenge for navigation algorithms used in that system |
| Aesthetics | Beacons hanging chaotically near doors Mostly not forming symmetric patterns | Beacons arranged in symmetric patterns; positioned alongside elements like sensors, lights, etc., beacons do not prominently stand out |
| Quantity of required transmitter | Number of transmitters depends on number of doors Required number is higher than in second arrangement | Number of transmitters depends on IoT system size Required number is lower than in second arrangement |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pyt, P.; Skrobacz, K.; Jankowski-Mihułowicz, P.; Węglarski, M.; Kamuda, K. Empowering Accessibility: BLE Beacon-Based IoT Localization. Electronics 2023, 12, 4012. https://doi.org/10.3390/electronics12194012
Pyt P, Skrobacz K, Jankowski-Mihułowicz P, Węglarski M, Kamuda K. Empowering Accessibility: BLE Beacon-Based IoT Localization. Electronics. 2023; 12(19):4012. https://doi.org/10.3390/electronics12194012
Chicago/Turabian StylePyt, Patryk, Kacper Skrobacz, Piotr Jankowski-Mihułowicz, Mariusz Węglarski, and Kazimierz Kamuda. 2023. "Empowering Accessibility: BLE Beacon-Based IoT Localization" Electronics 12, no. 19: 4012. https://doi.org/10.3390/electronics12194012
APA StylePyt, P., Skrobacz, K., Jankowski-Mihułowicz, P., Węglarski, M., & Kamuda, K. (2023). Empowering Accessibility: BLE Beacon-Based IoT Localization. Electronics, 12(19), 4012. https://doi.org/10.3390/electronics12194012