
ROS Implementation of Planning and Robust Control Strategies for Autonomous Vehicles


Abstract
:1. Introduction
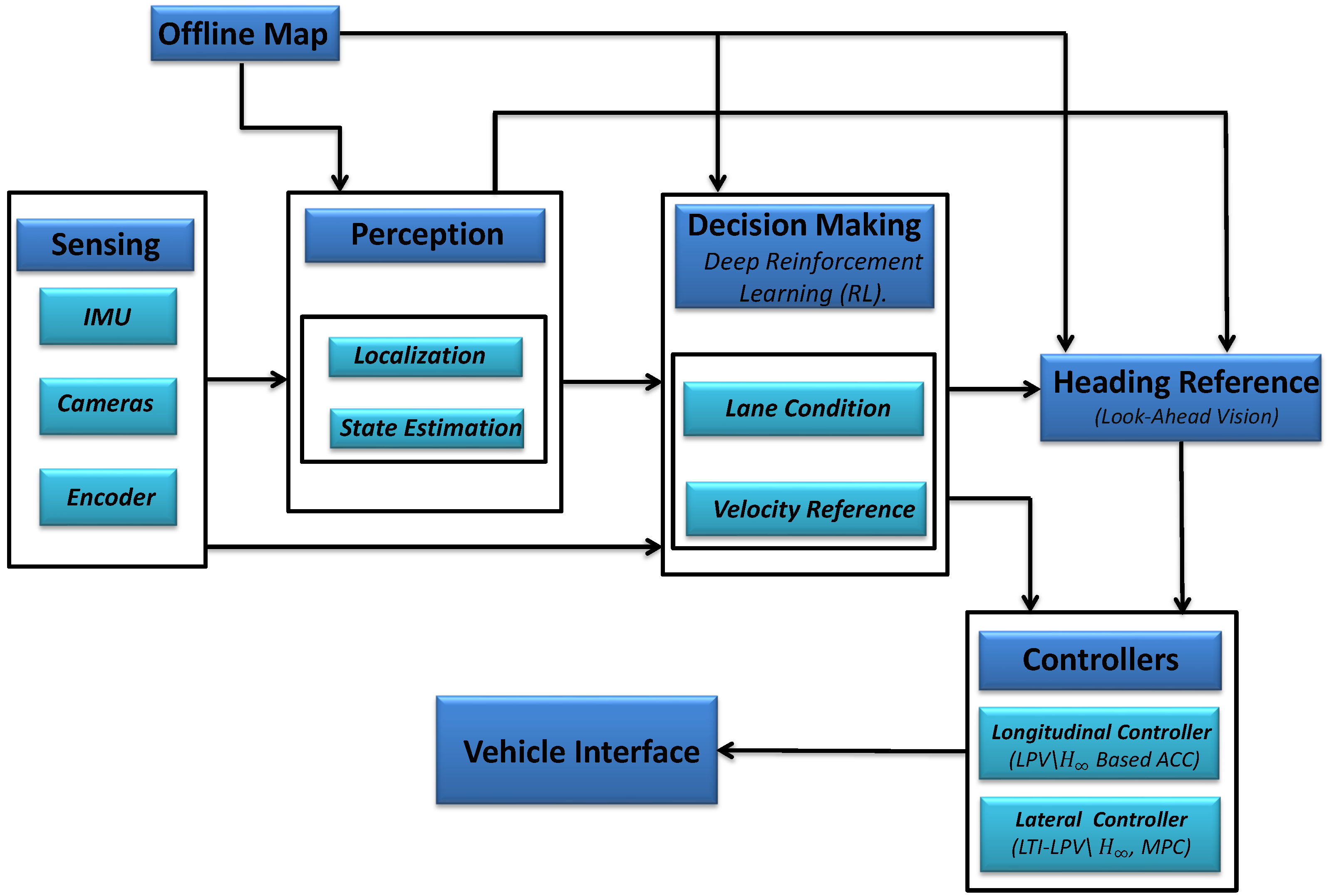
- Designing the ROS2 architecture: The initial focus is on developing the ROS2 architecture, taking into account technical implementation considerations. ROS2 serves as a crucial tool for testing of control algorithms. Although there has been some progress in implementing an autonomous vehicle architecture in ROS2, accomplishing this objective has proven challenging due to the variety of tasks involved. The framework will be utilized by colleagues to implement decision making and different vehicle lateral dynamic control algorithms.
- Estimating the lateral dynamics parameters of the new vehicle: With the introduction of a new vehicle, it is necessary to identify its model and estimate the lateral dynamics parameters. This step involves conducting multiple experiments, processing collected data, and addressing the mechanical aspects of the vehicle. Additionally, a realistic simulation is designed to test the controllers prior to implementation.
- Control of the lateral dynamics using a robust controller and planning algorithms: The final objective is to control the lateral dynamics of the vehicle utilizing a robust controller and planning algorithms. This controller can be easily tuned and demonstrates good performance for linear systems. It also accounts for uncertainties and disturbances affecting the system. Furthermore, since the algorithm considers various system parameters, the LPV tool is tested to enhance vehicle tracking performance.
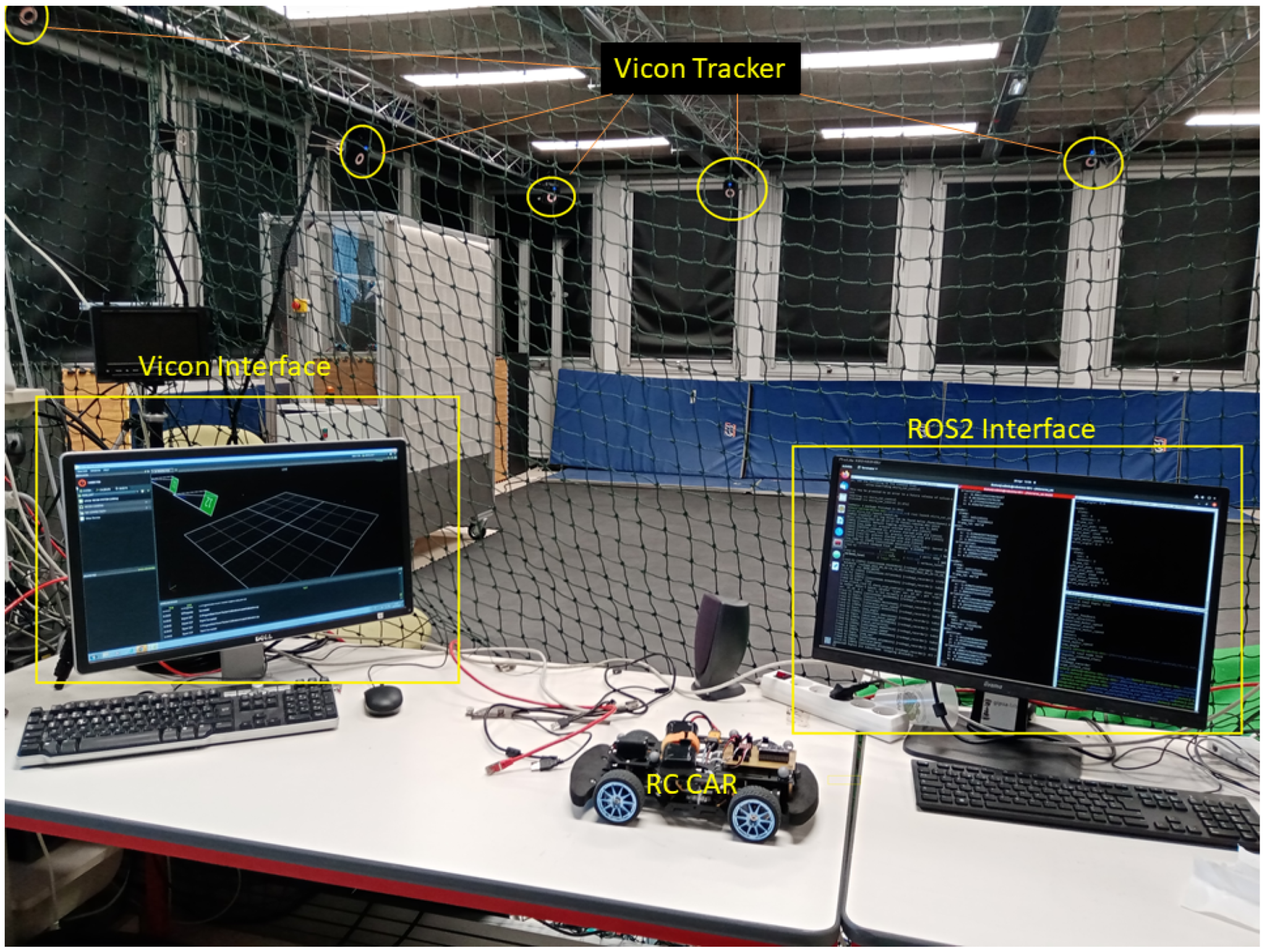
2. Experimental Setup
Autonomous Vehicle ROS Implementation Framework
3. Control Theory
3.1. Definition of Norm
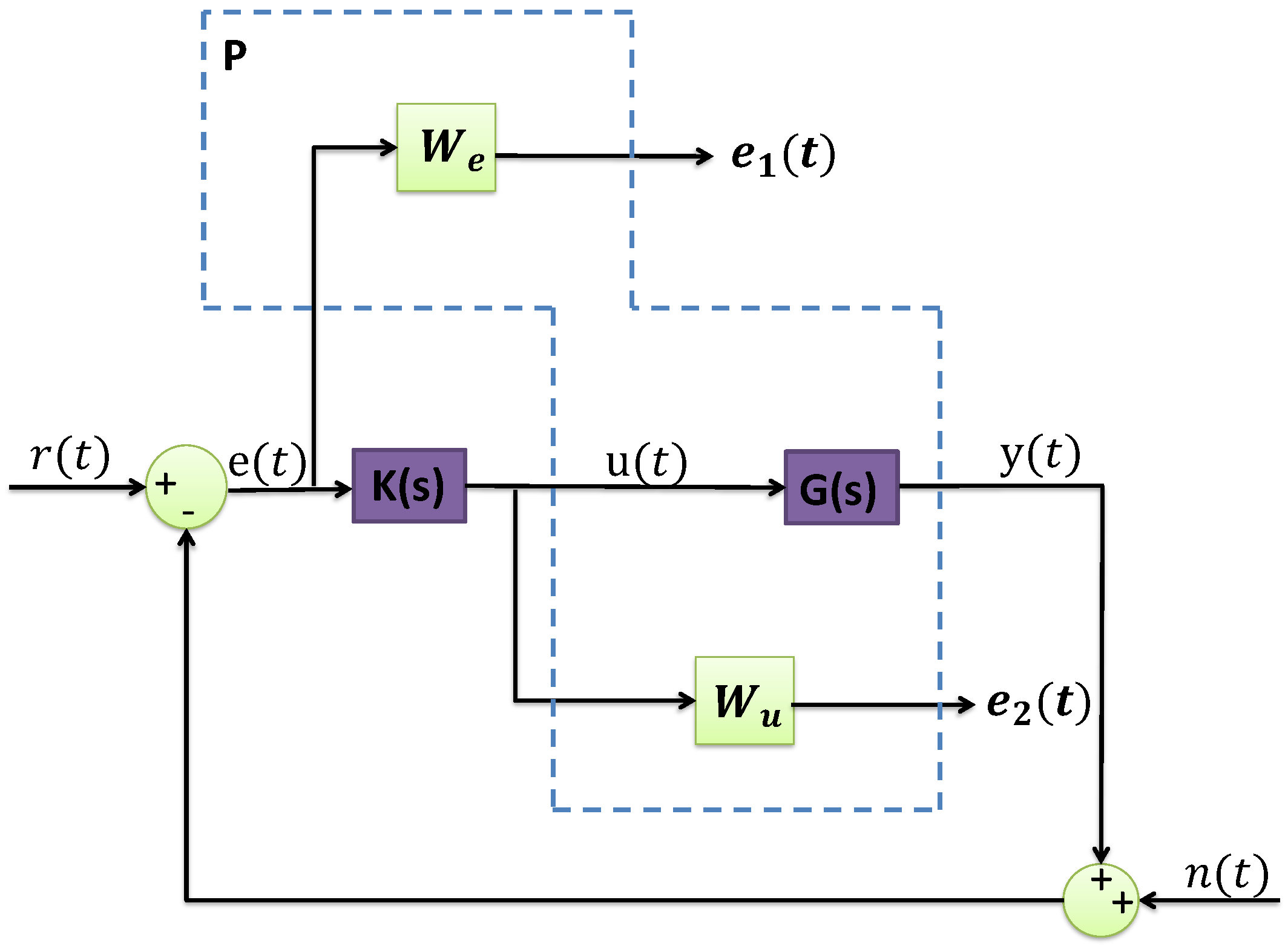
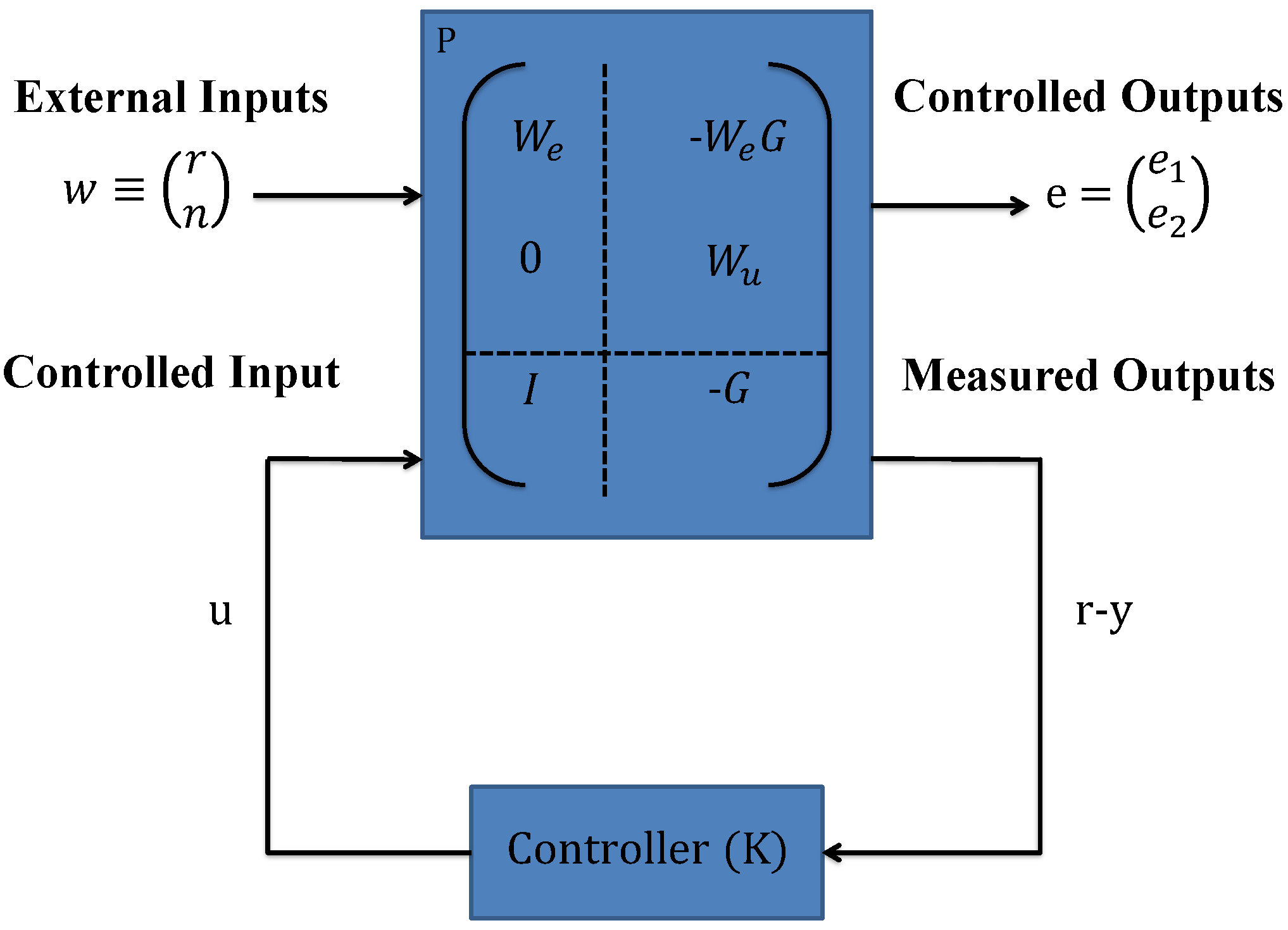
3.2. Control Problem Formulation
- : Robustness required with max module margin;
- : Tracking speed and rejecting disturbances;
- : Steady-state tracking error;
- : Actuator constraints based on ;
- : Actuator bandwidth;
- : Attenuated noises on controlled input.
3.3. LPV System Modeling Formulation
3.3.1. Affine Parameter Dependence
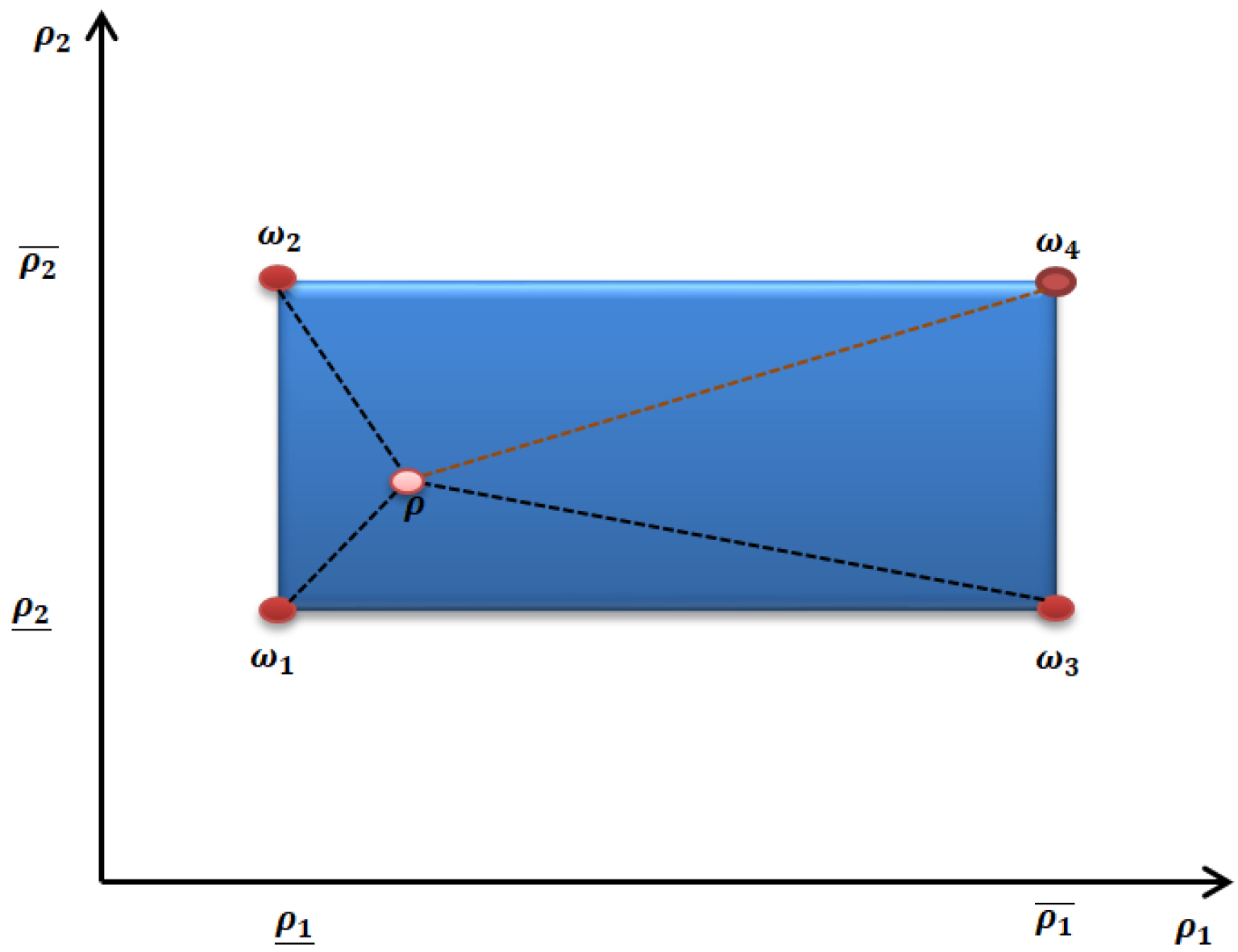
3.3.2. Polytopic Modeling Approach
4. Estimation of the Bicycle Lateral Model Parameters
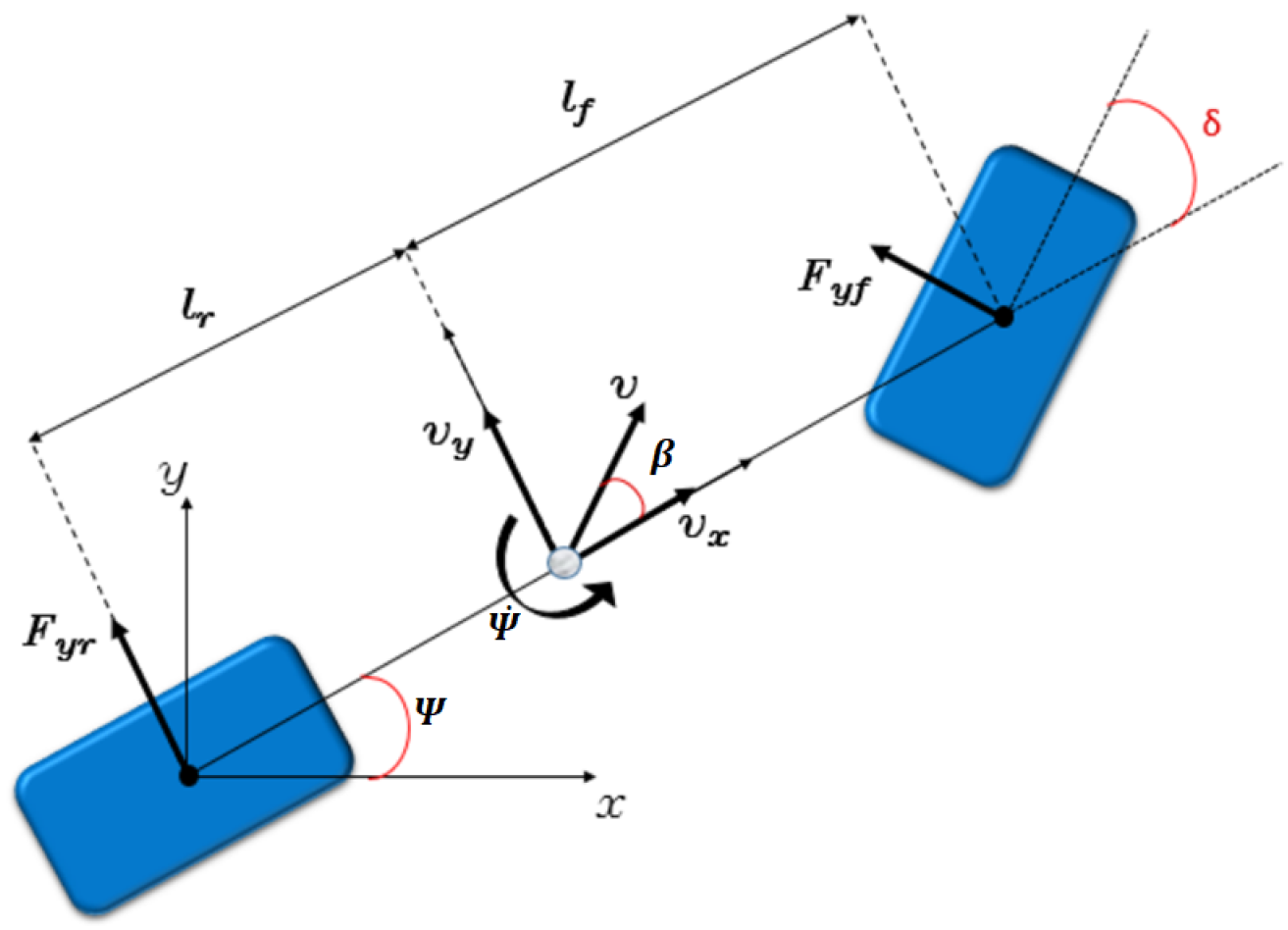
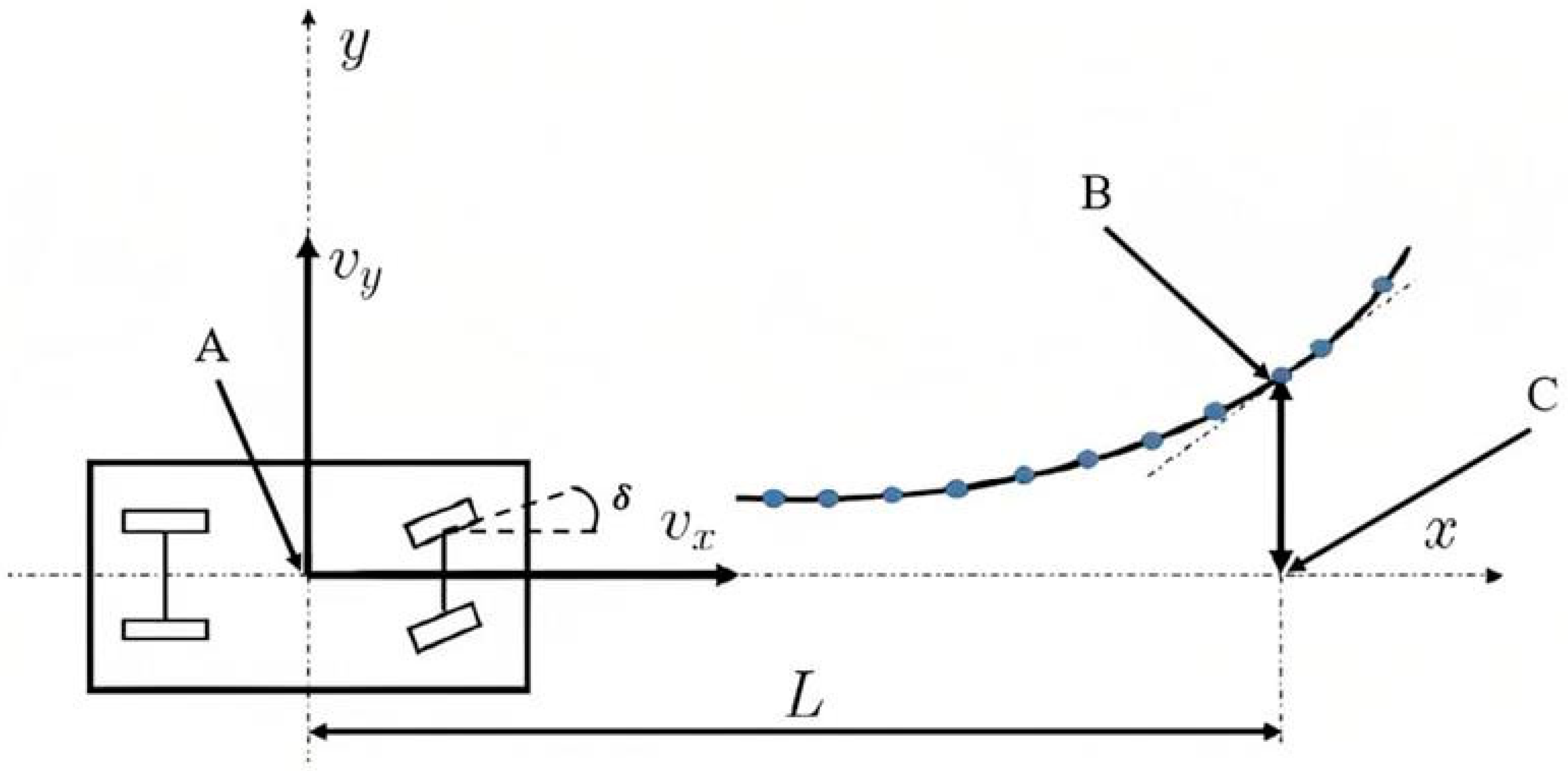
4.1. Mathematical Modeling
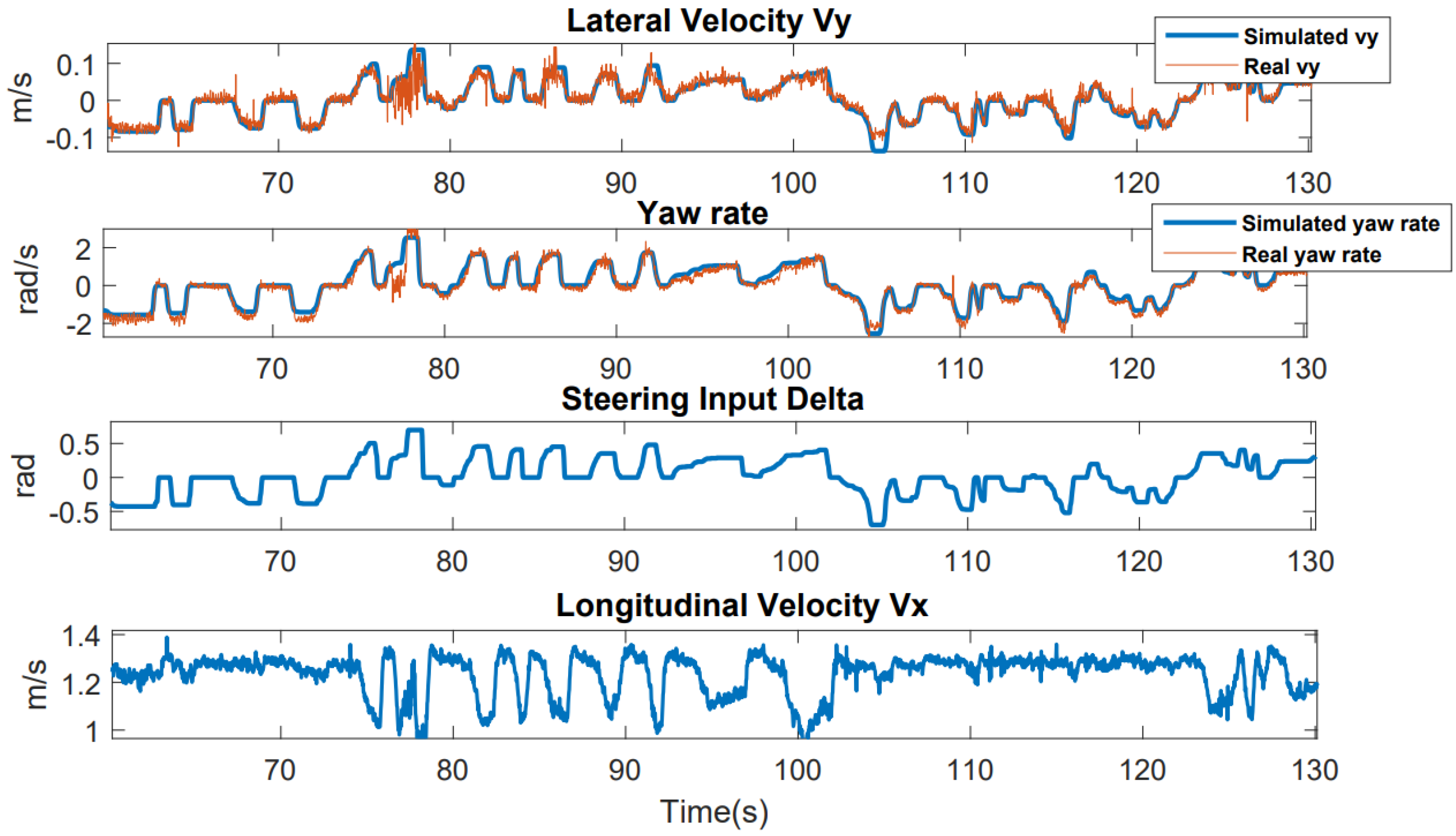
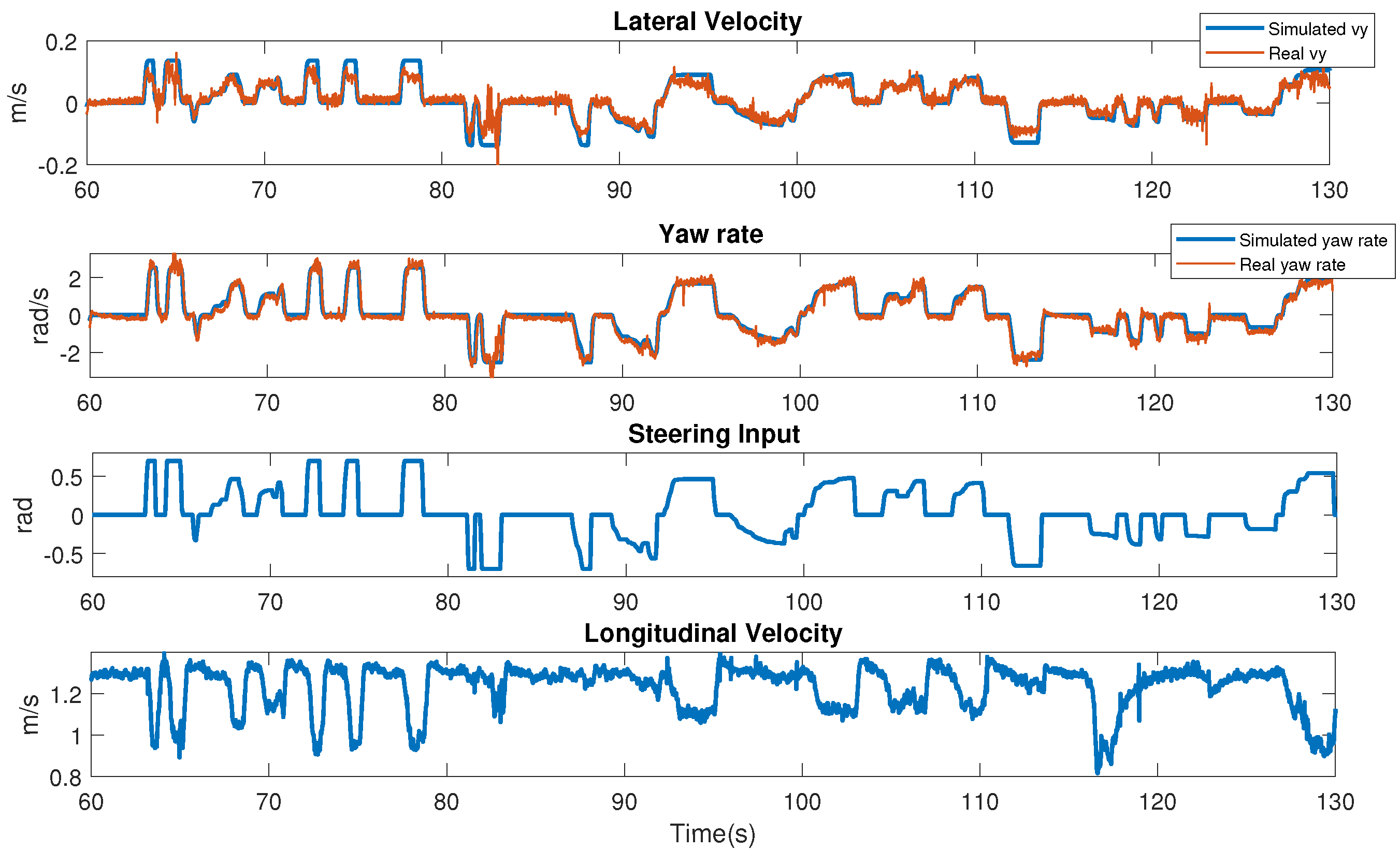
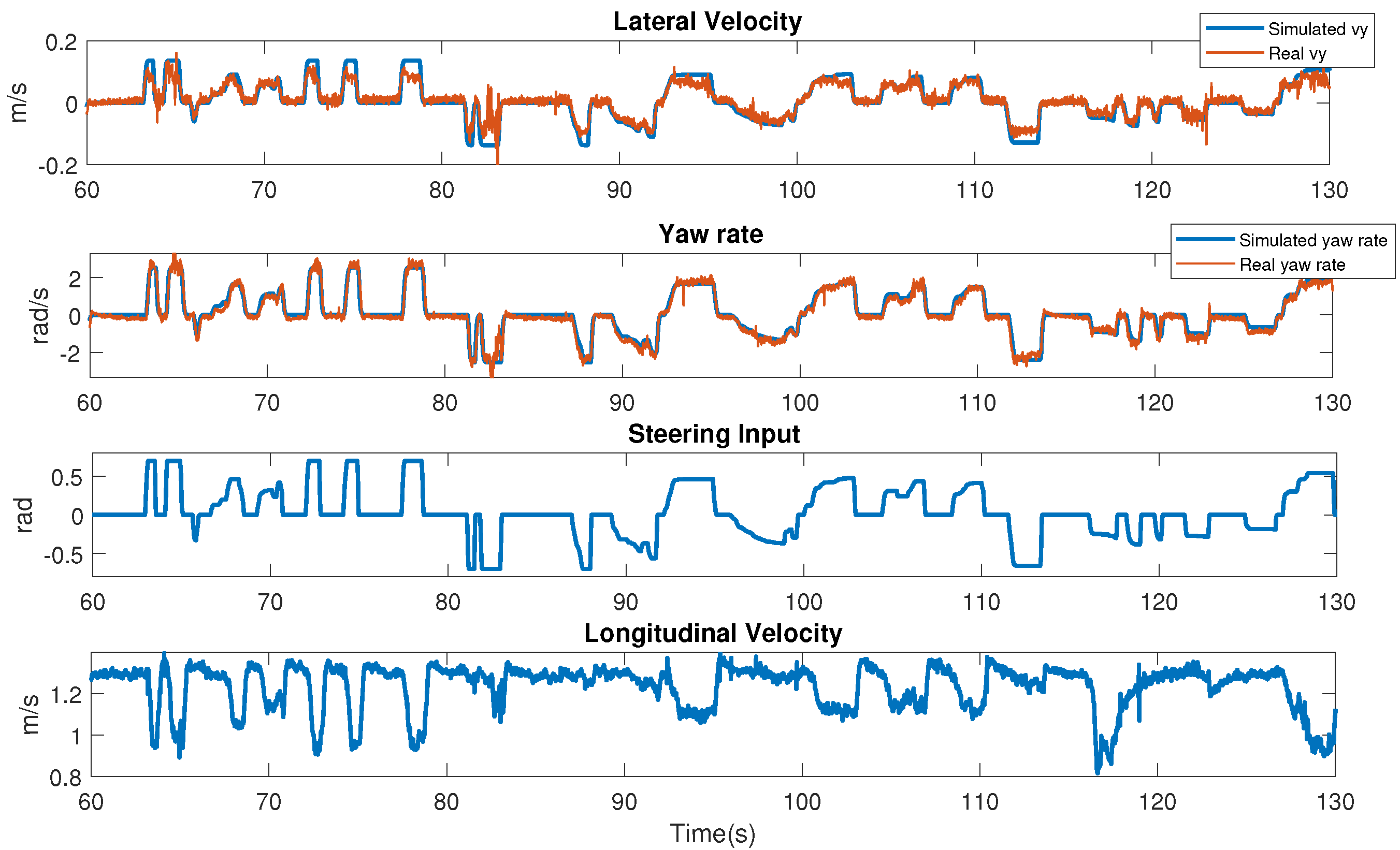
4.2. System Identification
5. Lateral Control Design
5.1. Look-Ahead Reference Generator
5.2. Controller
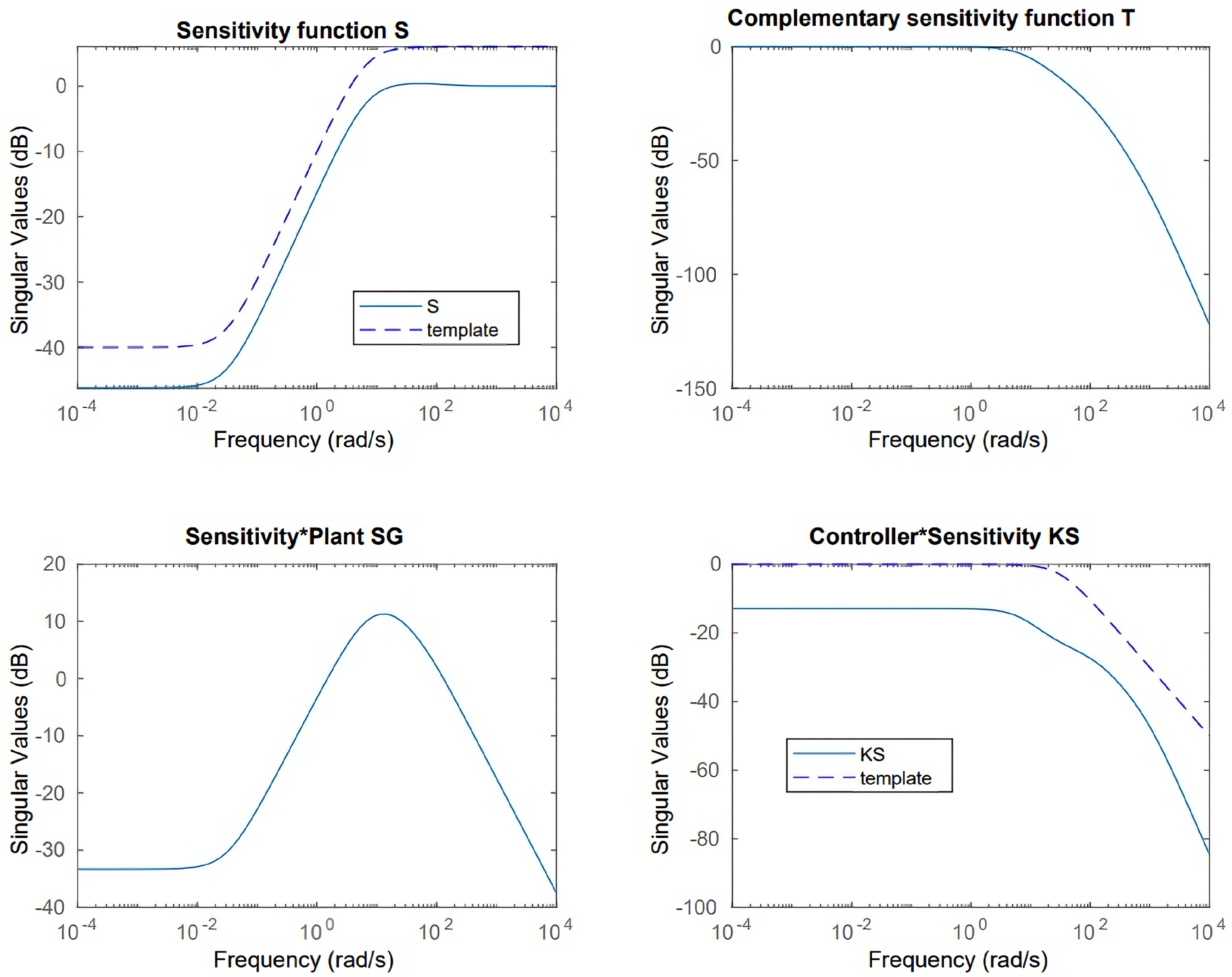
5.3. Controller
6. Simulation and Experimental Results
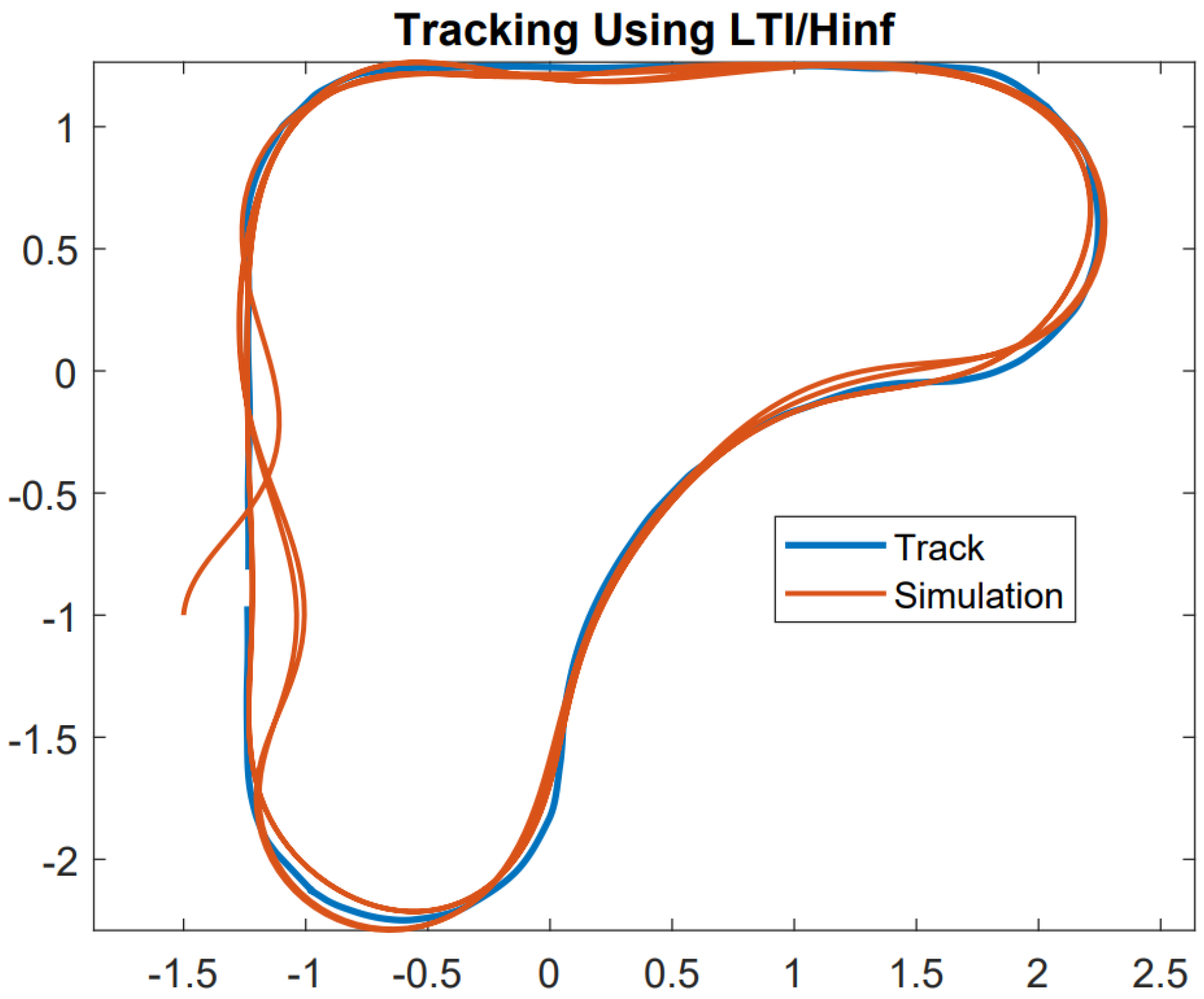
6.1. Simulation of LTI/ Controller
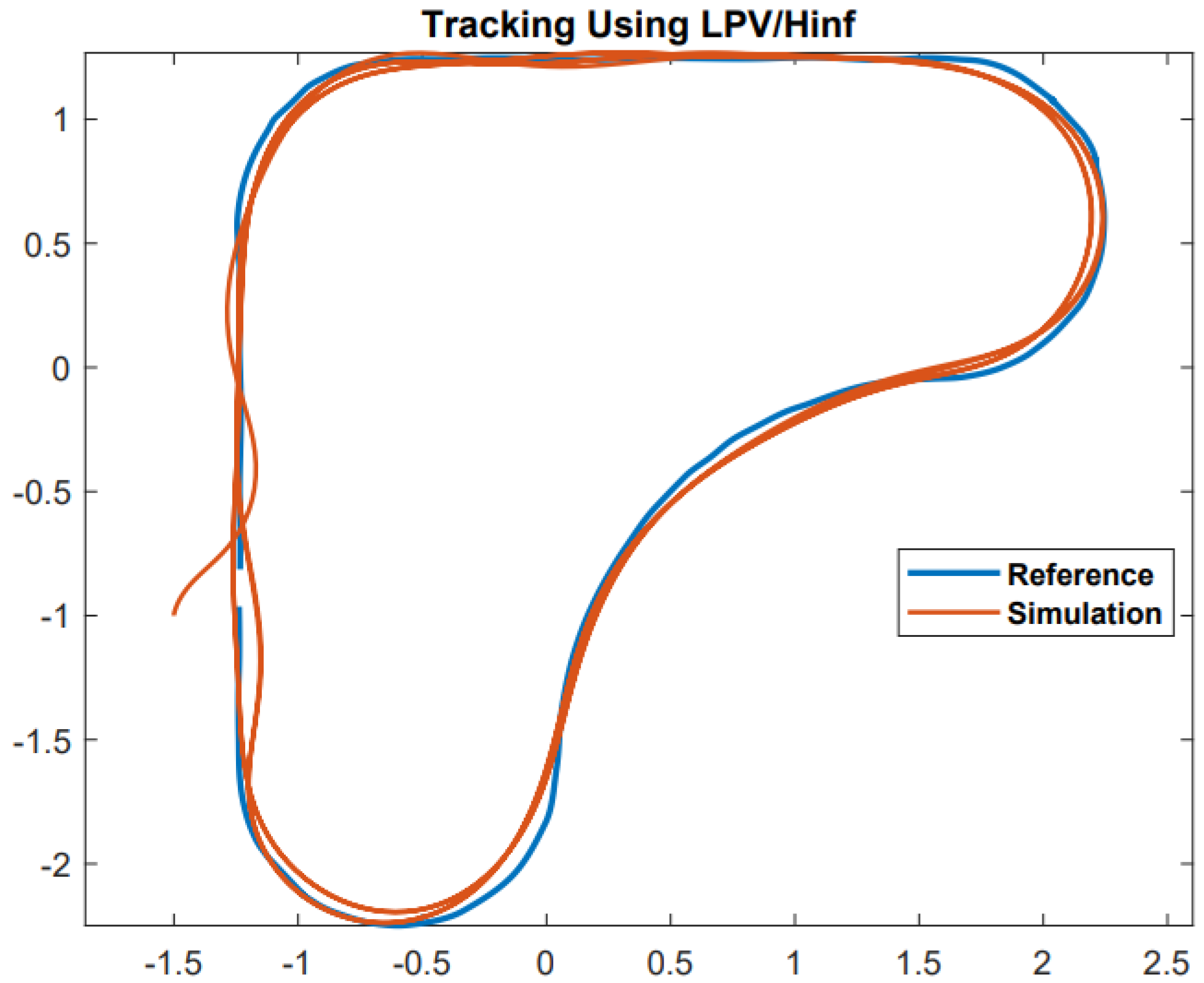
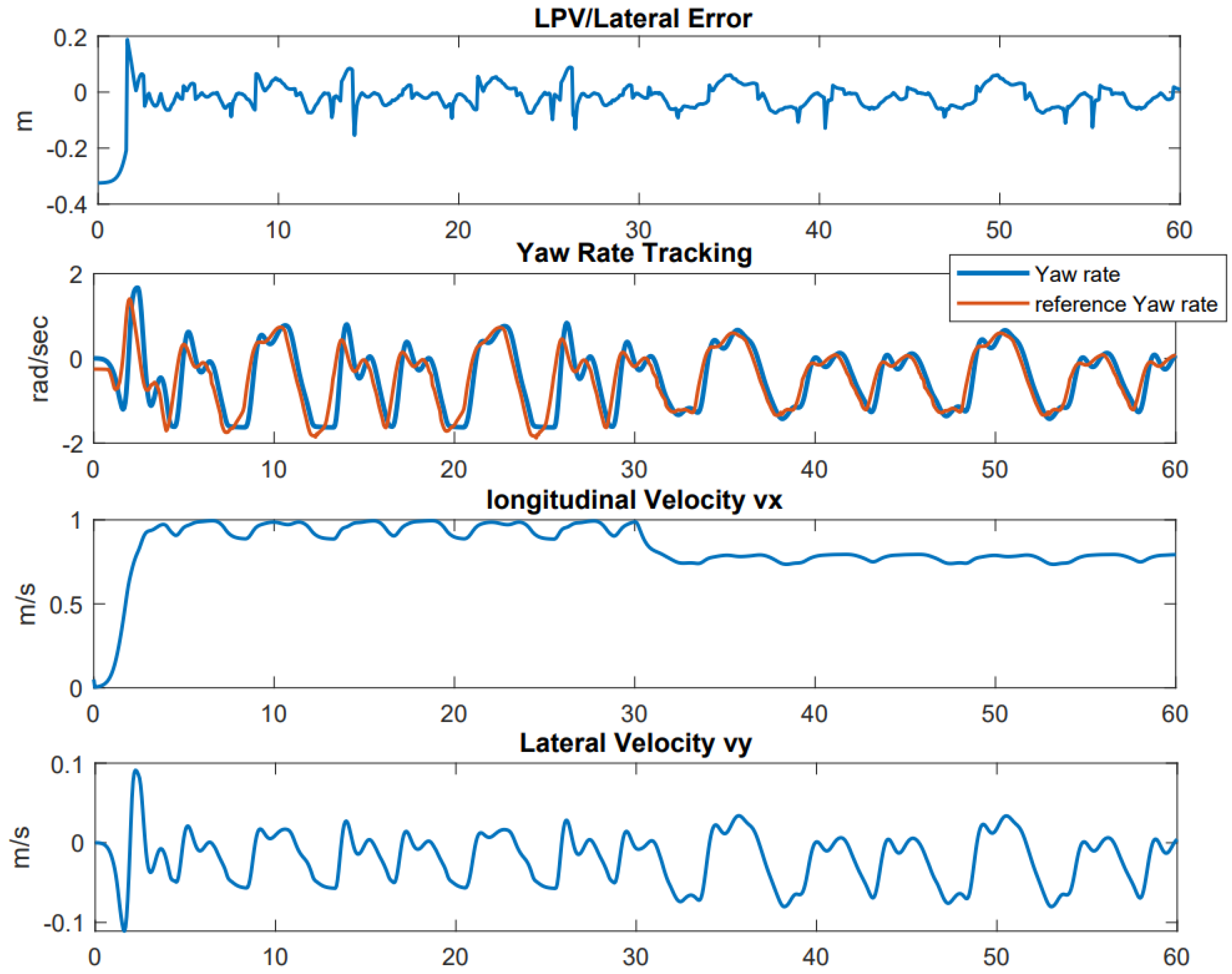
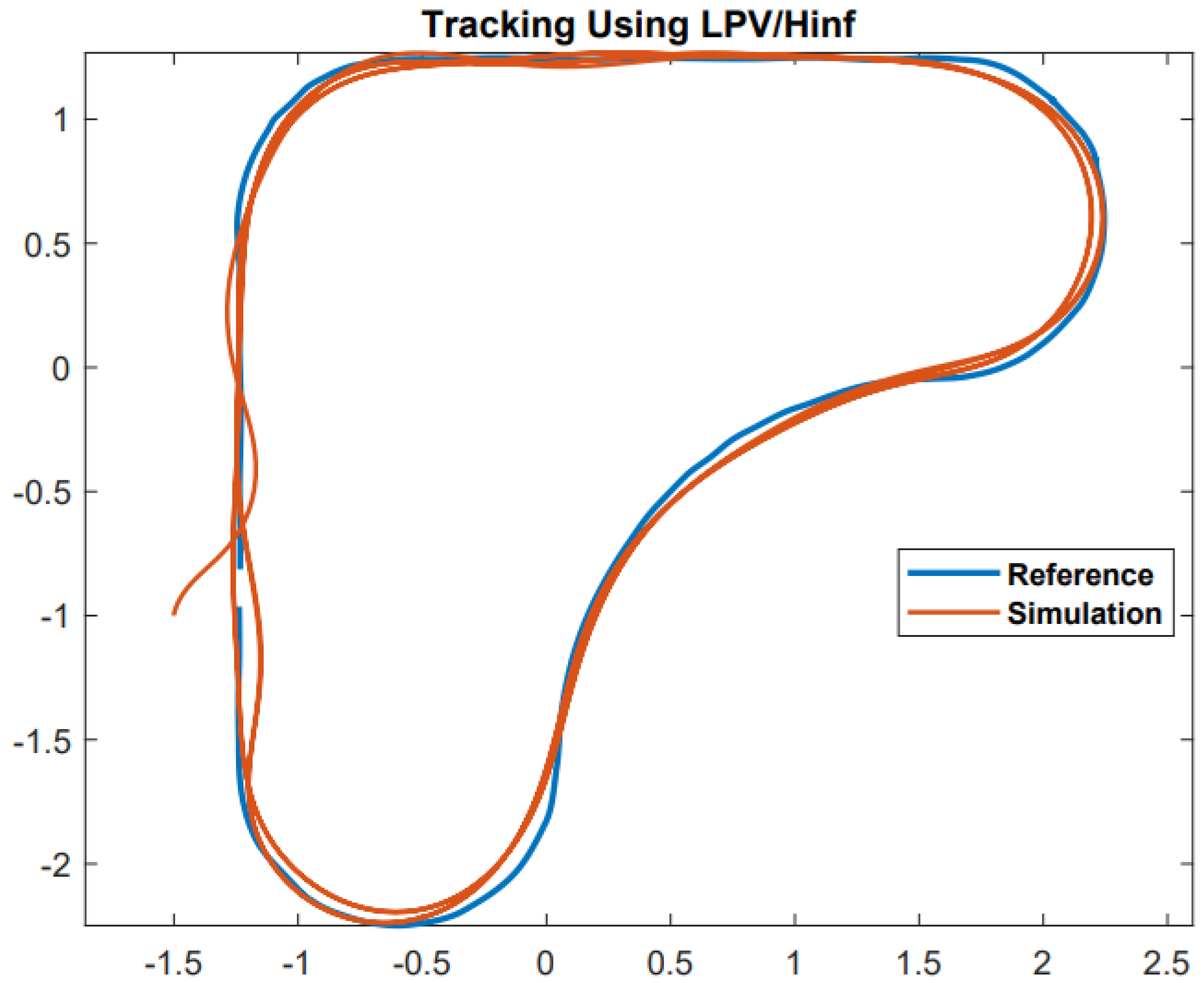
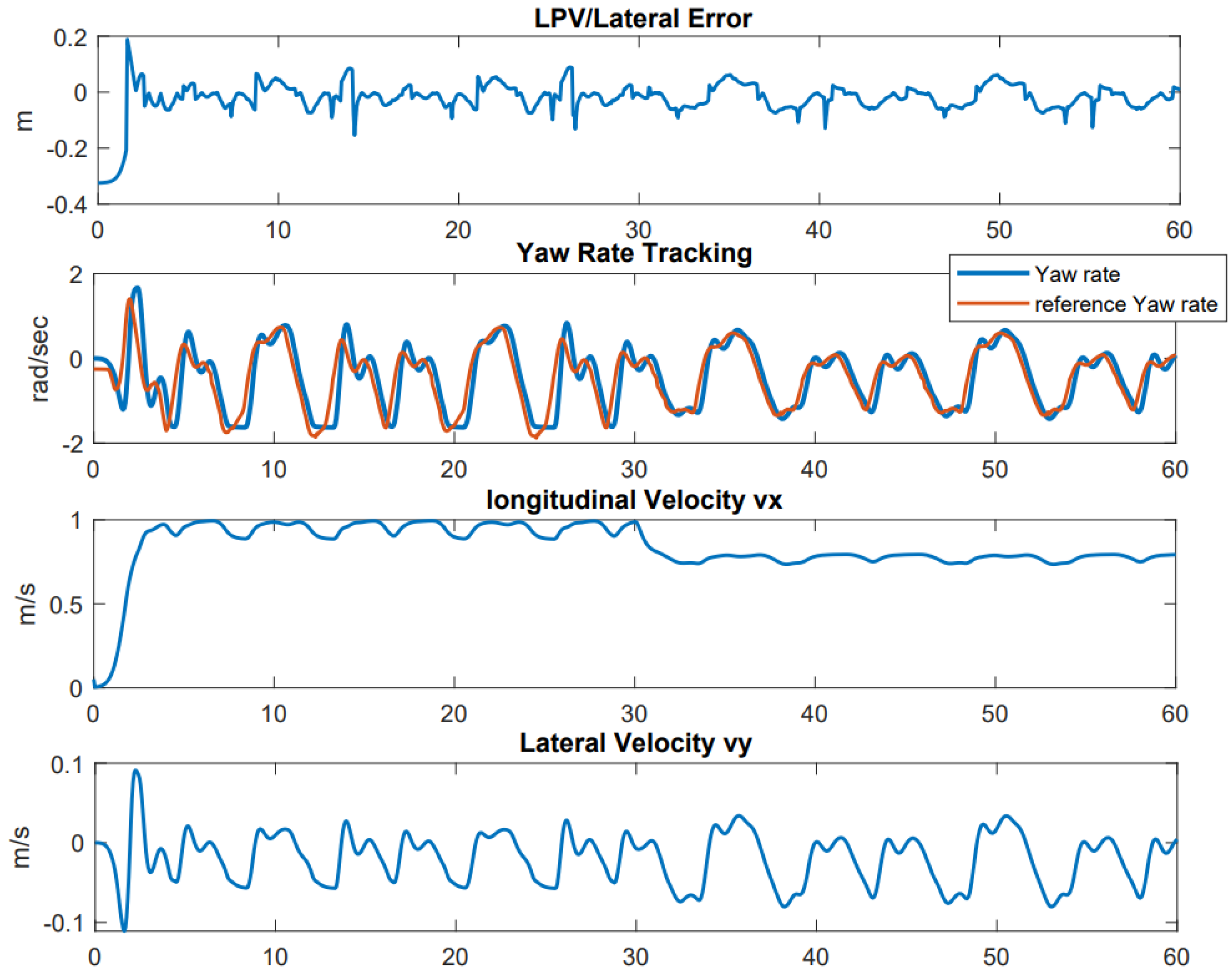
6.2. Simulation of LPV/ Controller
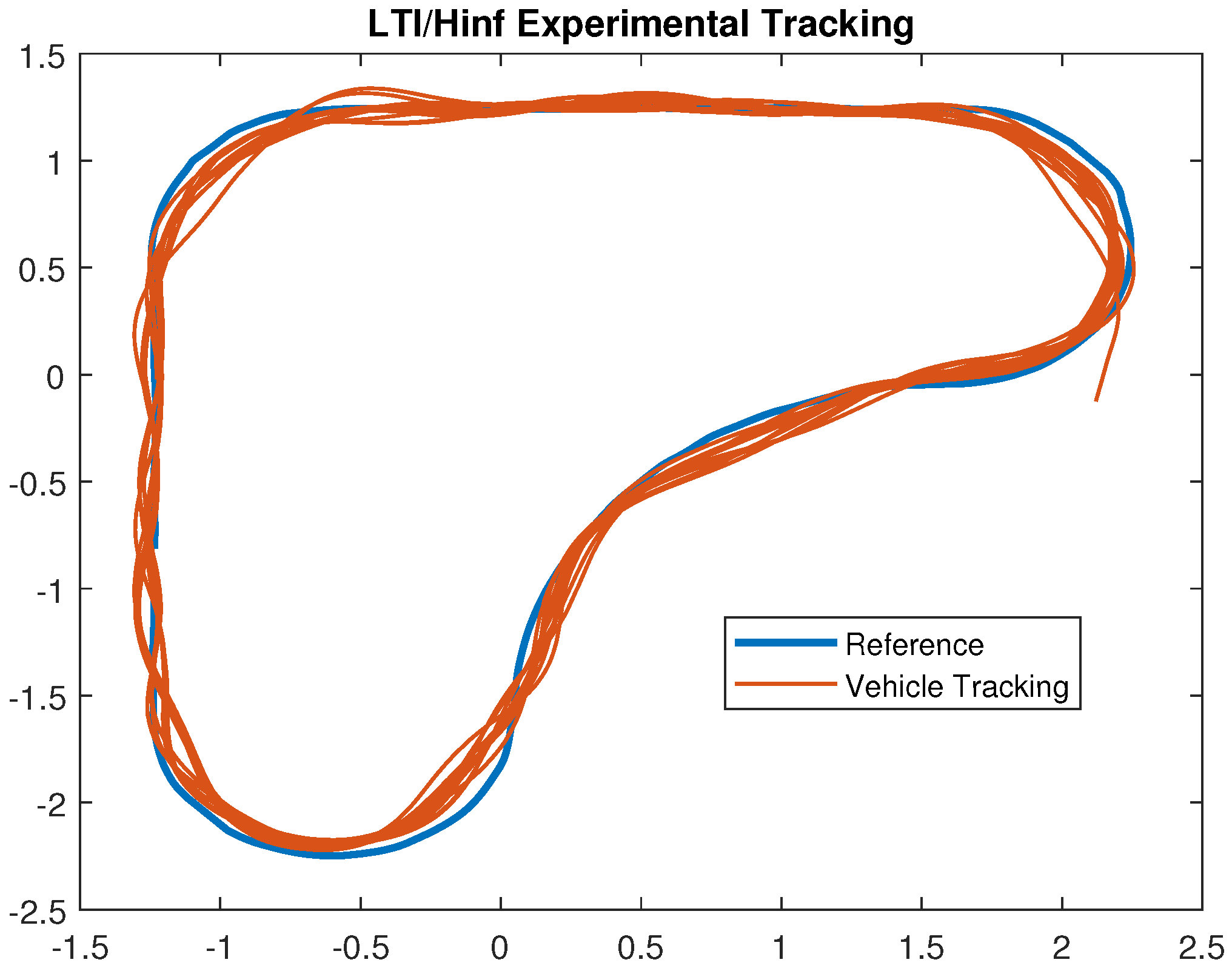
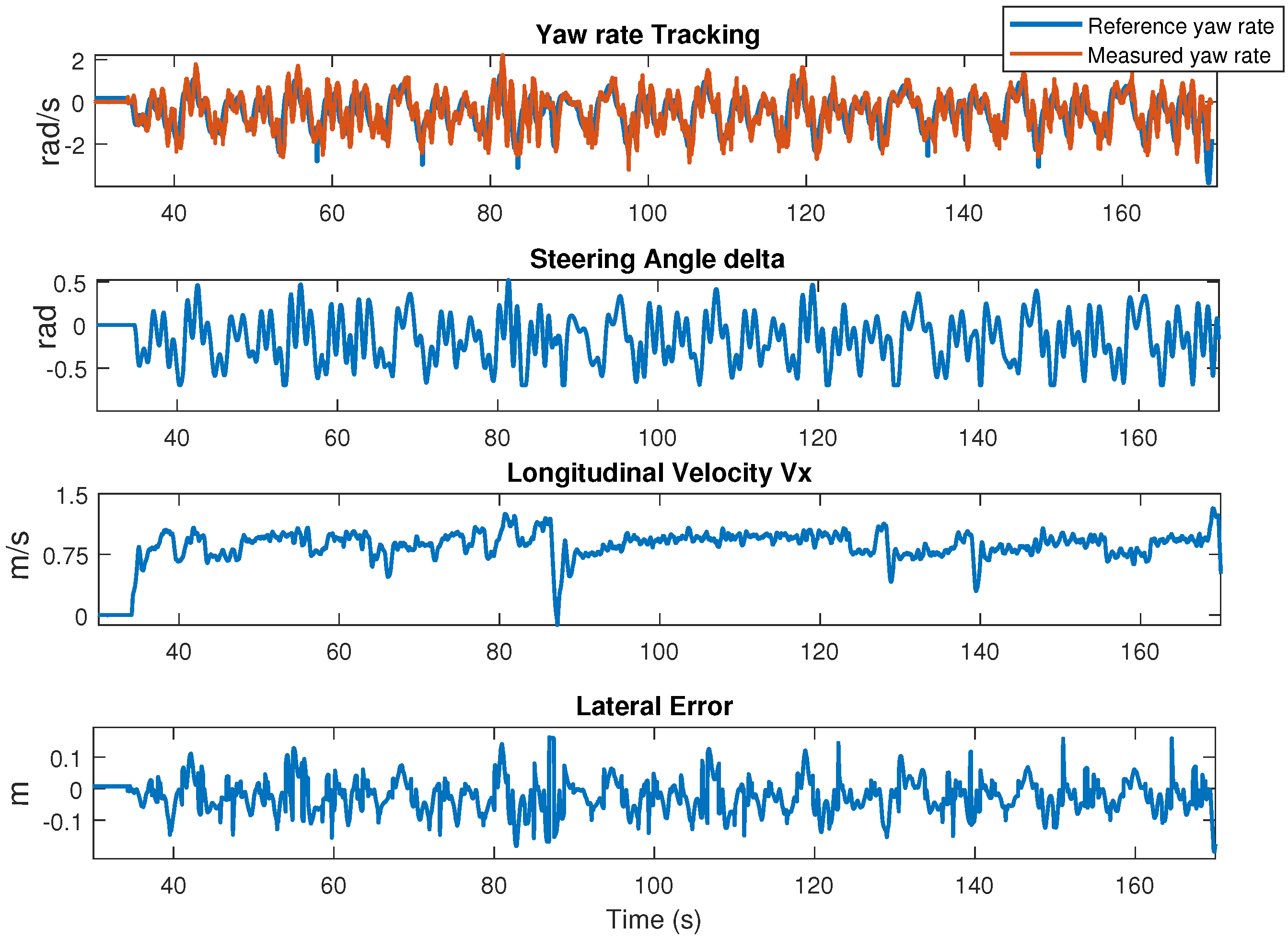
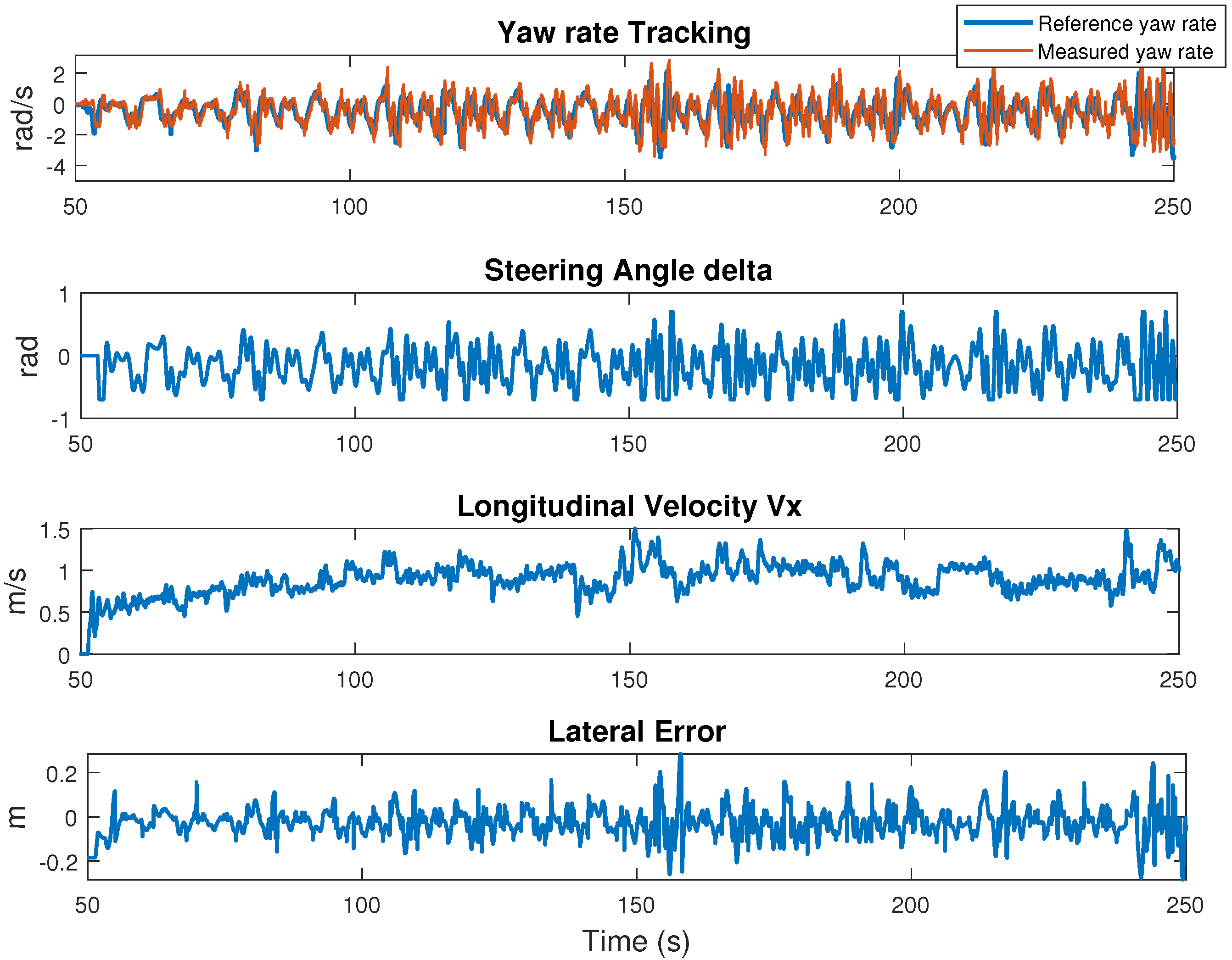
6.3. Experimental Results of LTI/
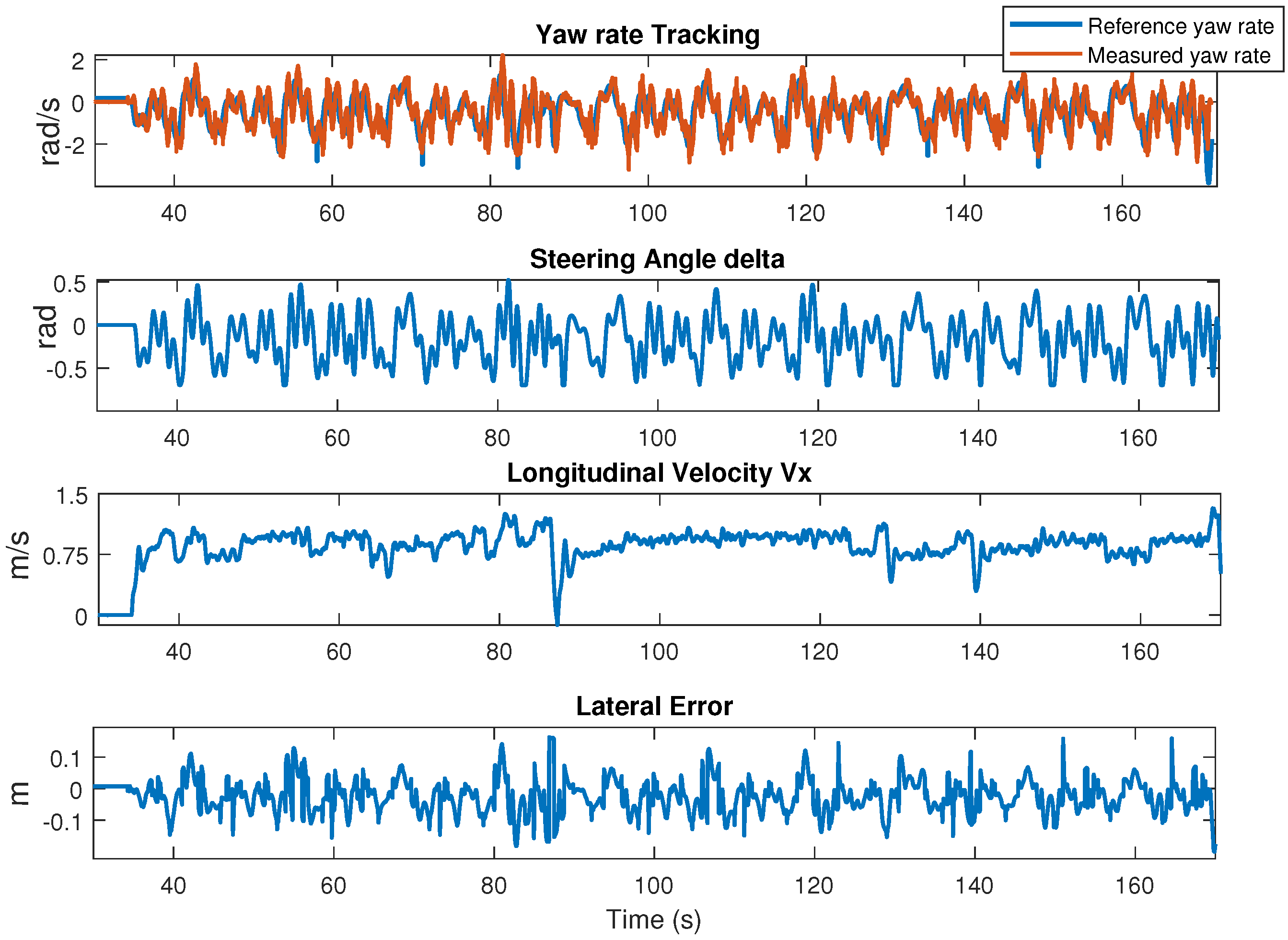
6.4. Experimental Results of LPV/
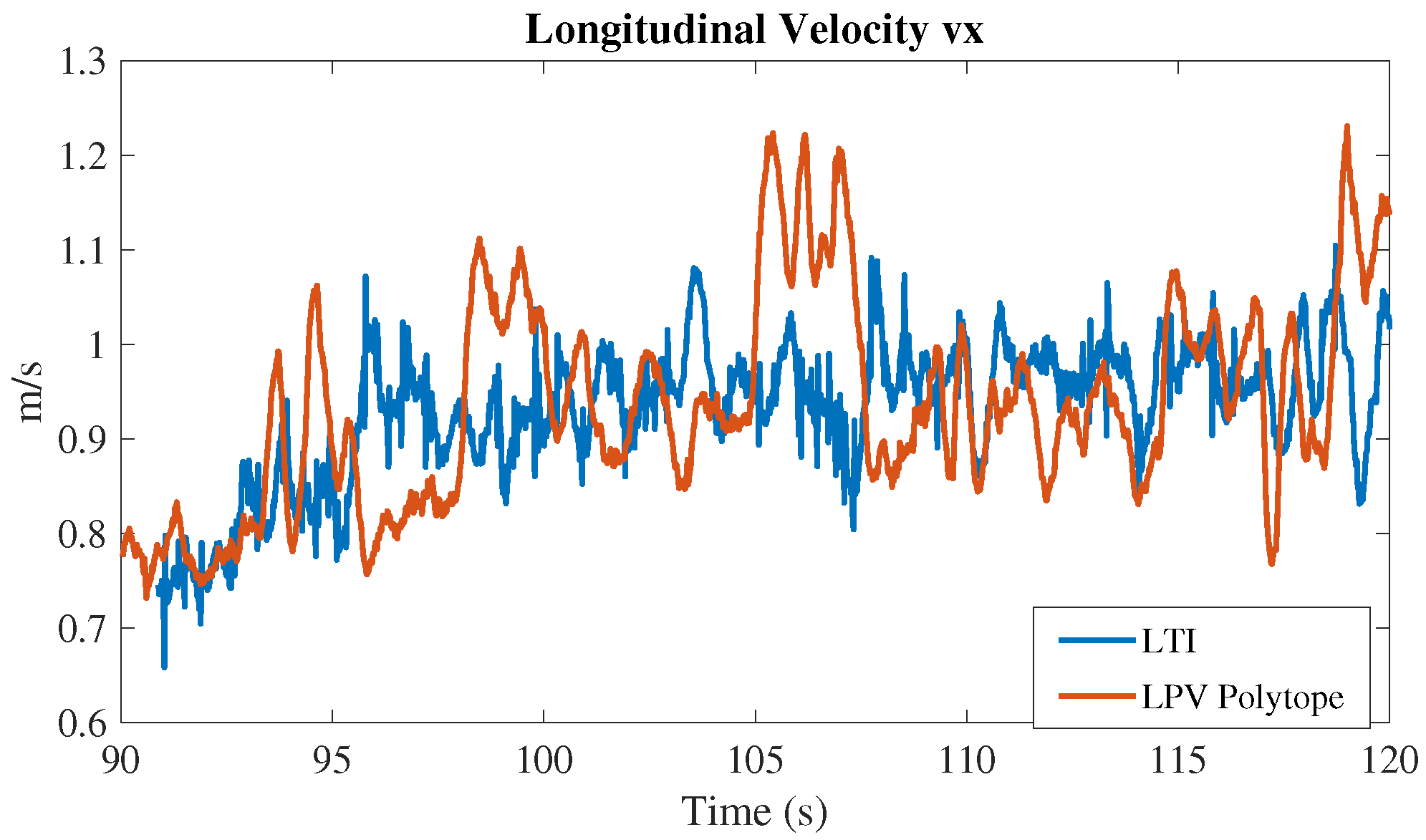
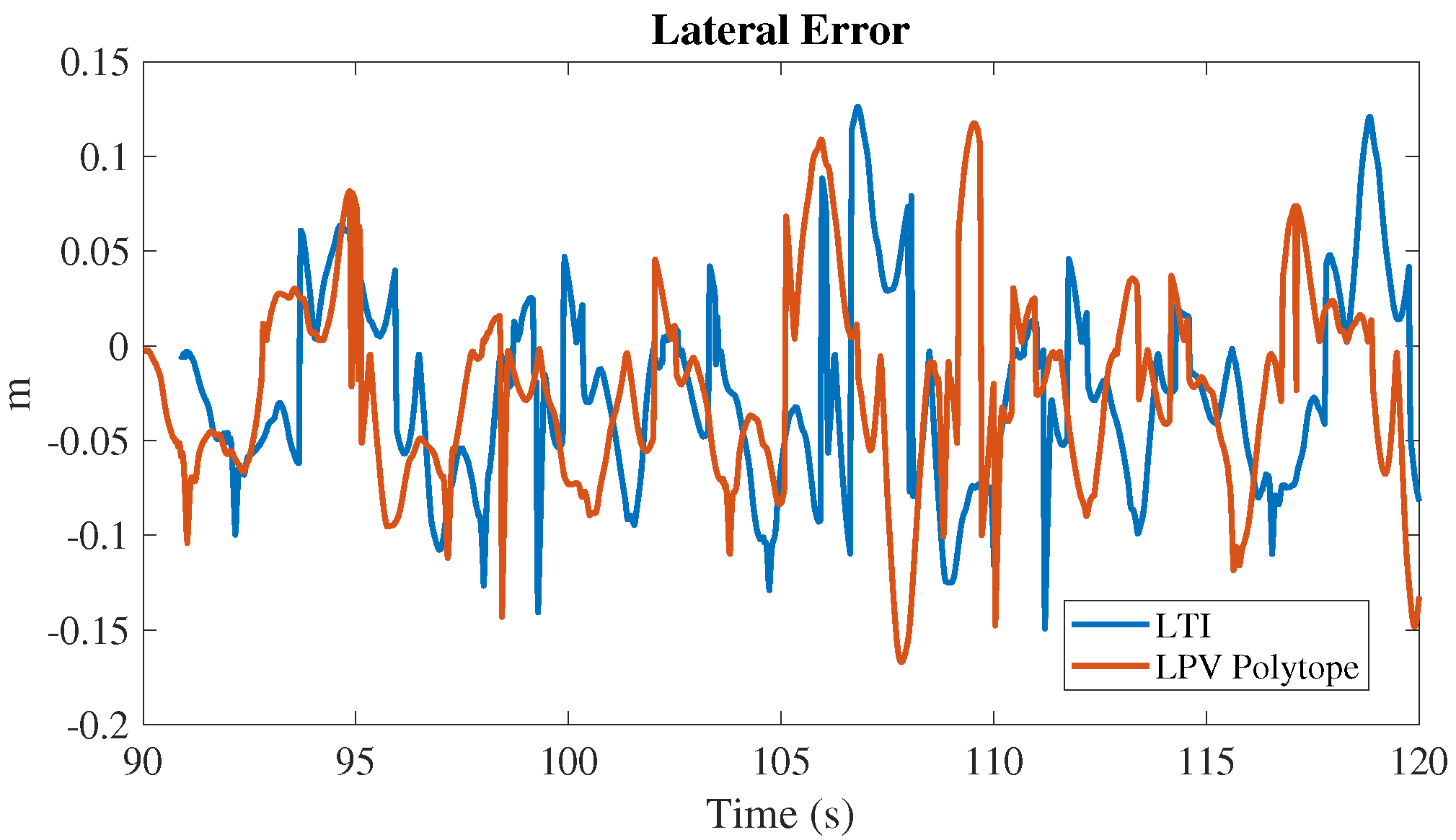
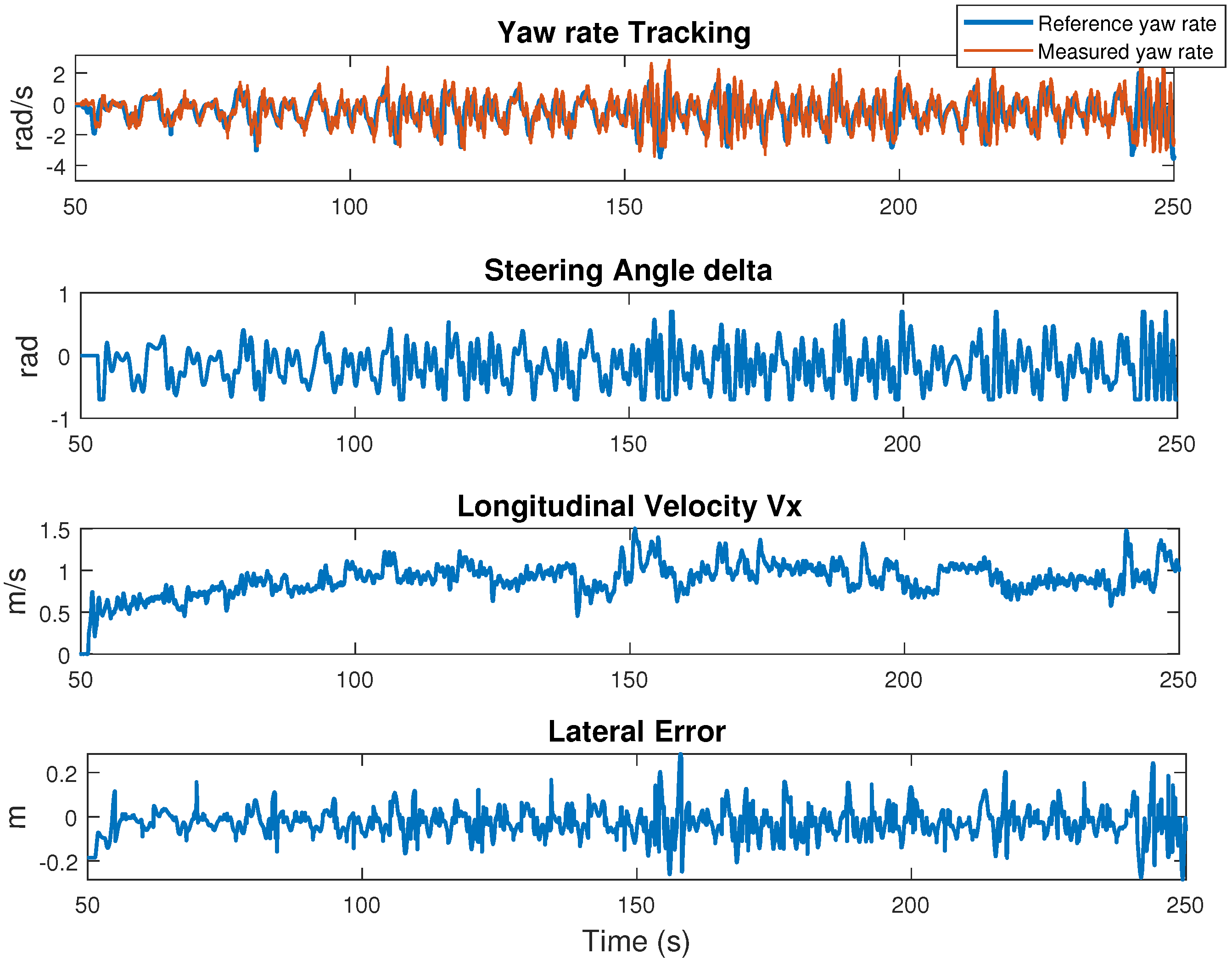
6.5. Experimental Comparison between LTI and Polytopic LPV
7. Conclusions
- We introduced the ROS2 environment, achieved through the design and development of a versatile architecture that breaks down the vehicle software controller into distinct levels. Each of these levels was addressed and adjusted independently.
- We introduced a concise discussion of the lateral dynamic model of the system, highlighting the impact of on its linear mode. Additionally, a parameter estimation-based prediction error method was presented, accompanied by realistic outcomes.
- The system is categorized as LTI or LPV depending on the variation of . For each scenario, a robust controller was designed and practically implemented using the previously described ROS2 architecture. In terms of experimental comparison, this study reveals the limitations of the LTI/ approach compared to the LPV/ approach, particularly when dealing with velocities higher than the designed operating point.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Aria, E.; Olstam, J.; Schwietering, C. Investigation of Automated Vehicle Effects on Driver’s Behavior and Traffic Performance. Transp. Res. Procedia 2016, 15, 761–770. [Google Scholar] [CrossRef]
- Czech, P.; Turoń, K.; Barcik, J. Autonomous vehicles: Basic issues. Zesz. Naukowe. Transp./Politech. Śląska(100) 2018, 100, 15–22. [Google Scholar] [CrossRef]
- Paden, B.; Čáp, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A Survey of Motion Planning and Control Techniques for Self-Driving Urban Vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef]
- Raviteja, S.; Shanmughasundaram, R. Advanced Driver Assitance System (ADAS). In Proceedings of the Second International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, 14–15 June 2018; pp. 737–740. [Google Scholar] [CrossRef]
- Kılıç, I.; Yazıcı, A.; Yıldız, Ö.; Özçelikors, M.; Ondoğan, A. Intelligent adaptive cruise control system design and implementation. In Proceedings of the 10th System of Systems Engineering Conference (SoSE), San Antonio, TX, USA, 17–20 May 2015; pp. 232–237. [Google Scholar] [CrossRef]
- Liu, W.; Hua, M.; Deng, Z.; Meng, Z.; Huang, Y.; Hu, C.; Song, S.; Gao, L.; Liu, C.; Shuai, B.; et al. A Systematic Survey of Control Techniques and Applications in Connected and Automated Vehicles. arXiv 2023, arXiv:2303.05665. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, X.; Wang, J. Extremum-Seeking-Based Adaptive Model-Free Control and Its Application to Automated Vehicle Path Tracking. IEEE/ASME Trans. Mechatron. 2022, 27, 3874–3884. [Google Scholar] [CrossRef]
- PTOLEMUS Consulting Group. 2019. Available online: https://www.ptolemus.com/topics/autonomous-vehicles/ (accessed on 24 June 2023).
- Sayssouk, W.; Atoui, H.; Medero, A.; Sename, O. Design and experimental Validation of an H-infinty Adaptive Cruise Control for a Scaled Car. In Proceedings of the ICMCE—10th International Conference on Mechatronics and Control Engineering (ICMCE 2021), Lisbon, Portugal, 26–28 July 2021. [Google Scholar]
- Kayacan, E. Multiobjective H∞ Control for String Stability of Cooperative Adaptive Cruise Control Systems. IEEE Trans. Intell. Veh. 2017, 2, 52–61. [Google Scholar] [CrossRef]
- Laib, K.; Sename, O.; Dugard, L. String Stable H∞ LPV Cooperative Adaptive Cruise Control with a Variable Time Headway. In Proceedings of the IFAC WC 2020—21st IFAC World Congress, Berlin, Germany, 11–17 July 2020. [Google Scholar]
- Luo, L.; Liu, H.; Li, P.; Wang, H. Model predictive control for adaptive cruise control with multi-objectives: Comfort, fuel-economy, safety and car-following. J. Zhejiang Univ. Sci. A 2010, 11, 191–201. [Google Scholar] [CrossRef]
- Sancar, F.E.; Fidan, B.; Huissoon, J.P.; Waslander, S.L. MPC based collaborative adaptive cruise control with rear end collision avoidance. In Proceedings of the IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; pp. 516–521. [Google Scholar] [CrossRef]
- Atoui, H.; Sename, O.; Milanés, V.; Molina, J.J.M. LPV-Based Autonomous Vehicle Lateral Controllers: A Comparative Analysis. IEEE Trans. Intell. Transp. Syst. 2021, 23, 13570–13581. [Google Scholar] [CrossRef]
- Kapsalis, D.; Sename, O.; Milanes, V.; Molina, J.M. Design and Experimental Validation of an LPV Pure Pursuit Automatic Steering Controller. IFAC-PapersOnLine 2021, 54, 63–68. [Google Scholar]
- Kosecka, J.; Blasi, R.; Taylor, C.J.; Malik, J. Vision-based lateral control of vehicles. In Proceedings of the Conference on Intelligent Transportation Systems, Boston, MA, USA, 9–12 November 1997; pp. 900–905. [Google Scholar]
- Zhou, X.; Wang, Z.; Wang, J. Popov-H∞ Robust Path-Tracking Control of Autonomous Ground Vehicles With Consideration of Sector-Bounded Kinematic Nonlinearity. J. Dyn. Syst. Meas. Control 2021, 143, 111004. [Google Scholar] [CrossRef]
- Zhao, J.; Li, W.; Hu, C.; Guo, G.; Xie, Z.; Wong, P.K. Robust Gain-Scheduling Path Following Control of Autonomous Vehicles Considering Stochastic Network-Induced Delay. IEEE Trans. Intell. Transp. Syst. 2022, 23, 23324–23333. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, X.; Wang, J. Robust gain-scheduling energy-to-peak control of vehicle lateral dynamics stabilisation. Veh. Syst. Dyn. 2014, 52, 309–340. [Google Scholar] [CrossRef]
- Brennan, S.; Alleyne, A. Generalized H∞ vehicle control utilizing dimensional analysis. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 3774–3780. [Google Scholar] [CrossRef]
- Alcalá, E.; Puig, V.; Quevedo, J. LPV-MPC Control for Autonomous Vehicles. IFAC Pap. 2019, 52, 106–113. [Google Scholar] [CrossRef]
- Menezes Morato, M.; Normey-Rico, J.; Sename, O. Model Predictive Control Design for Linear Parameter Varying Systems: A Survey. Annu. Rev. Control 2020, 49, 64–80. [Google Scholar] [CrossRef]
- Alcalá, E.; Puig, V.; Quevedo, J.; Rosolia, U. Autonomous racing using Linear Parameter Varying-Model Predictive Control (LPV-MPC). Control Eng. Pract. 2020, 95, 104270. [Google Scholar] [CrossRef]
- Ao, D.; Huang, W.; Wong, P.K.; Li, J. Robust Backstepping Super-Twisting Sliding Mode Control for Autonomous Vehicle Path Following. IEEE Access 2021, 9, 123165–123177. [Google Scholar] [CrossRef]
- Tagne, G.; Talj, R.; Charara, A. Higher-Order Sliding Mode Control for Lateral Dynamics of Autonomous Vehicles, with Experimental Validation. In Proceedings of the IEEE Intelligent Vehicles Symposium, Proceedings, Gold Coast City, Australia, 23 June 2013; pp. 678–683. [Google Scholar] [CrossRef]
- Alberri, M.; Hegazy, S.; Badra, M.; Nasr, M.; Shehata, O.M.; Morgan, E.I. Generic ROS-based Architecture for Heterogeneous Multi-Autonomous Systems Development. In Proceedings of the 2018 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Madrid, Spain, 12–14 September 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Reke, M.P.; Schulte-Tigges, D.; Schiffer, J.; Ferrein, S.; Walter, A.; Matheis, T.D. A Self-Driving Car Architecture in ROS2. In Proceedings of the 2020 International SAUPEC/RobMech/PRASA Conference, Cape Town, South Africa, 29–31 January 2020. [Google Scholar]
- Atoui, H.; Sename, O.; Milanés, V.; Martinez, J.J. Intelligent Control Switching for Autonomous Vehicles based on Reinforcement Learning. In Proceedings of the 2022 IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, 4–9 June 2022. [Google Scholar]
- Medero, A.; Morato, M.M.; Puig, V.; Sename, O. MPC-based optimal parameter scheduling of LPV controllers: Application to Lateral ADAS Control. In Proceedings of the 2022 30th Mediterranean Conference on Control and Automation (MED), Vouliagmeni, Greece, 28 June 2022–1 July 2022. [Google Scholar]
- Chen, G.; Zhao, X.; Gao, Z.; Hua, M. Dynamic Drifting Control for General Path Tracking of Autonomous Vehicles. IEEE Trans. Intell. Veh. 2023, 8, 2527–2537. [Google Scholar] [CrossRef]
- Atoui, H.; Sename, O.; Alcala, E.; Puig, V. Parameter Varying Approach for a Combined (Kinematic + Dynamic) Model of Autonomous Vehicles. IFAC-PapersOnLine 2020, 53, 15071–15076. [Google Scholar] [CrossRef]
- Bamieh, B.; Giarre, L. Identification of linear parameter varying models. In Proceedings of the 38th IEEE Conference on Decision and Control (Cat. No.99CH36304), Phoenix, AZ, USA, 7–10 December 1999; pp. 1505–1510. [Google Scholar] [CrossRef]
- Ho Duc, D. Some Results on Closed-Loop Identification of Quadcopters; Linköping University Electronic Press: Linköping, Sweden, 2018. [Google Scholar] [CrossRef]
- Dominguez, S.; Ali, A.; Garcia, G.; Martinet, P. Comparison of lateral controllers for autonomous vehicle: Experimental results. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Janeiro, Brazil, 1–4 November 2016; pp. 1418–1423. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
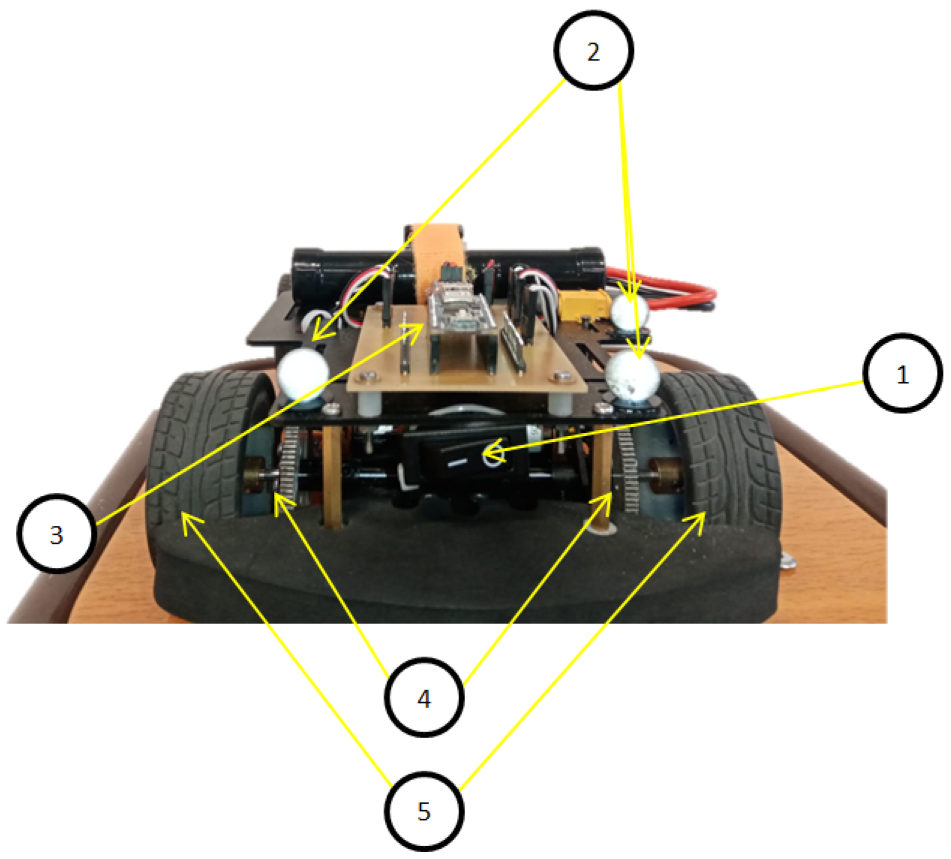
| Type | Functionality | |
|---|---|---|
| 1 | Swicth | Switching car power ON/OFF. |
| 2 | 8 mm Qualisys super-spherical | Captured by Vicon tracker. |
| 3 | Arduino RP 2040 | Microcontroller of the vehicle. |
| 4 | Spur gears | Increase torque provided by BLDC. |
| 5 | Elastic wheel | 2 rear wheels of the vehicle. |
| 6 | ACCU NI-MH 3000 | Supply battery power. |
| 7 | MG996R servo motor | Steering actuator. |
| 8 | Elastic wheel | 2 Front wheels of the vehicle. |
| 9 | BLDC–A2212/13T | Throttle actuator. |
| Parameter | Value | S.I Units |
|---|---|---|
| m | Kg | |
| Kg·m | ||
| m | ||
| m |
| Parameter | Value |
|---|---|
| 2 | |
| (rad/s) | 3.14 |
| 1 | |
| (rad/s) | 31.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hachem, M.; Borrell, A.M.; Sename, O.; Atoui, H.; Morato, M. ROS Implementation of Planning and Robust Control Strategies for Autonomous Vehicles. Electronics 2023, 12, 3680. https://doi.org/10.3390/electronics12173680
Hachem M, Borrell AM, Sename O, Atoui H, Morato M. ROS Implementation of Planning and Robust Control Strategies for Autonomous Vehicles. Electronics. 2023; 12(17):3680. https://doi.org/10.3390/electronics12173680
Chicago/Turabian StyleHachem, Mohamad, Ariel M. Borrell, Olivier Sename, Hussam Atoui, and Marcelo Morato. 2023. "ROS Implementation of Planning and Robust Control Strategies for Autonomous Vehicles" Electronics 12, no. 17: 3680. https://doi.org/10.3390/electronics12173680
APA StyleHachem, M., Borrell, A. M., Sename, O., Atoui, H., & Morato, M. (2023). ROS Implementation of Planning and Robust Control Strategies for Autonomous Vehicles. Electronics, 12(17), 3680. https://doi.org/10.3390/electronics12173680