
Smart Parking System Based on Edge-Cloud-Dew Computing Architecture

Abstract
1. Introduction
- The trend in system development: The usage of cloud services is a global trend. It can effectively utilize other cloud resources and increase the horizontal and vertical scalability of the system.
- Economic efficiency with scalability: Most smart parking systems rely heavily on image recognition to complete many innovation jobs, so the local build will experience the problem of relying heavily on computing and storage resource provision. This requires a great deal of expensive investment. However, the business demand of a parking lot fluctuates. When it comes to holidays or public events, parking services are usually very tight, and the quality of service is low. When the parking lot is in the off-season, its services are idle and a waste of investment. Hence, in the long run, using scalable cloud services is a better choice.
- Issues of system maintenance: The machine learning model used for image recognition needs to be retrained regularly to reflect changes in the environment, such as license plate format revision, shifting of the camera’s viewing angle, or fluctuations in lighting conditions. In these situations, business owners are usually unable to adjust or improve the system themselves, while cloud service providers can seamlessly adjust it remotely.
2. Related Works
2.1. Smart Parking System
- The significant manual workload of parking lot inspection and ticketing;
- The inefficiency of parking space usage;
- Inability to allocate the optimal location and layout of parking space for new incoming cars [9].
2.2. Edage-Cloud-Dew Computing Architecture
- Localized mode: where all the services are provided within the internal local network perimeter;
- Global mode: where it functions as an intermediate device in the client–server cloud model.
- He described the intersection of Software as a Service (SaaS) with the dew computing paradigm as Software-as-a-Dew Service (SaaDS) and Software-as-Dew Product (SaaDP). When one goes offline on SaaS, the other continually holds the business under the SaaS service model. Related data will be stored partly in cloud servers and partly in the local machine. The sew server can access and update the information stored in the local machine and also that synchronized with the cloud server.
- He also described the intersection of Infrastructure-as-a-Service (IaaS) with the dew computing paradigm as Infrastructure-as-a-Dew Service (IaaDS). The dew server ensures that the local infrastructure is safely recovered from the cloud when infrastructure-related data is lost or destroyed. Hence, the dew server must store all settings related to the infrastructure’s data as a backup copy into the cloud.
2.3. AIoT
3. Materials and Method
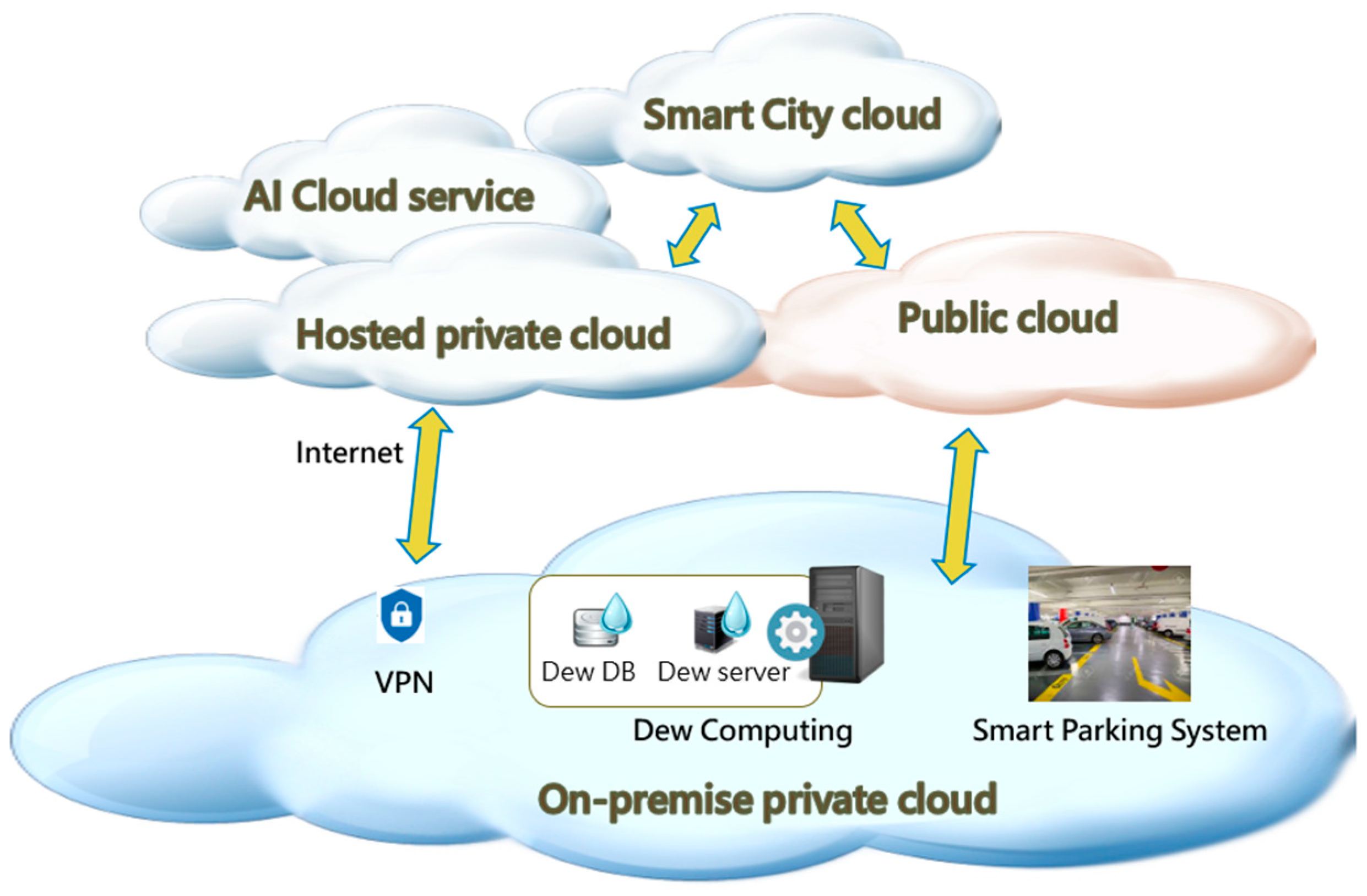
3.1. The Cloud-Dew Architecture for Smart Parking System
- On-premise private cloud: Private clouds comprise two primary types: externally hosted cloud solutions and internally locally hosted (or on-premise hardware) solutions. The main differences are the overall cost, level of support required, and feature scaling. In this case, we adopt both types of private cloud. The on-premise one can provide the components which require performance-critical missions, and the external cloud can provide the components which require massive batch computing or long-term persistence. Thus, in the on-premise private cloud, we had the client side of the smart parking and dew computing systems, and on the hosted private cloud, we had the server side of the smart parking system.
- Hosted private cloud: This is the core version of the smart parking system when an Internet connection is available. The dew server synchronizes with this version of the parking system.
- AI service cloud (third-party AI cloud service): Cloud service providers (CSP) provide services dedicated to specific tasks: object detection via video, face recognition of celebrities, and speech-to-text conversion. Some of these providers even offer advanced computing platforms (e.g., AI Platform as a Service (AI PaaS)). Instead of using a customized machine software package, some of the in-operation parking systems have begun to use third-party AI cloud services to assemble their image recognition systems. In our case, for the purpose of reducing the complicity of dew computing architecture, we built our own image recognition service from scratch.
- Smart city cloud (community cloud): By means of a smart city cloud, smart city services can be provided. For instance, when a vehicle departs from a parking space, city-wide IoT sensors notify the driver of available parking spaces via a smartphone app or messaging. Also, by using the cloud in the field of smart parking, stakeholders and governments can use the data for storage, analysis, and sharing in order to take the most effective actions.
- Local smart parking system: In the LAN environment, the client user interacts with the local smart parking system (the client-side agent). The agent takes care of communicating with the server side of the smart parking system for the purpose of system coordination. Also, the dew server periodically synchronizes with the server-side system in the background to prepare the dew service’s functions. When executing the image recognition function, it uses the cloud version of the image recognition service by default. However, when the Internet is unavailable, it functions as a proxy of the cloud image recognition service in order to execute the car plate recognition task.
- Image recognition tasks: The tasks include visual surveillance, license plate recognition, parking space detection, etc. These computing processes need to stay local for real-time performance. In our case, only the license plate recognition task was executed for simplicity.
- Video management middleware: For large-scale video surveillance, the middleware management system provides a consolidated hub of management capabilities, including system management, user management, and various extensive services. It also provides the buffer for image data processing.
- Cloud smart parking system: The server-side smart parking system collects the parking transaction data for operational analysis and auditing. It provides the cloud service/API for the client-side agent to use. In addition, it acts as a portal for administrators. By combining with the public cloud, it can collaborate with the enterprise resource planning system.
- Proxy image recognition service: This service is activated when the Internet is unavailable. The dew server is responsible for initializing and running it, and then shutting it down when the Internet is restored. It uses a lite version of the machine learning model to perform image recognition. A lite version of the model is downloaded in advance and updated at every scheduled time.
3.2. The Operational Flow of Dew License Plate Recognition Service
- Proxy image recognition model: A lite version of the model is downloaded from the cloud. Since the model is always a copy of the latest cloud version, we do not need to spend effort on maintenance or adjustment. However, it may not fit with the dynamic changes in the parking lot environment. We can enhance it using the recently collected dataset, which consists of the aforementioned enhanced training data. Although the initial performance of the lite proxy model may not be of high enough quality for real-time operation, after enhanced training, it approaches the performance level of the cloud image recognition model.
- Dew container: The proxy image recognition service is an API program hosted in a container environment. The dew container takes care of the initialization/destruction of the container from the image repository. After the container is prepared, the service can be run on it.
- Dew ML training: We use the enhanced training data to train the proxy image recognition model. The whole process is intended to fulfill the function of the dew service; thus, we call it dew ML training.
- Dew DB: The dew DB stores the configuration of the dew service, copies of pieces of cloud software, dew hyper-parameters, and fast training strategies and policies for dew ML training. The dew server uses them for the initialization of the proxy service.
- From the dew DB, gather the initialization-related data for the following process;
- Initial the dew container to prepare and activate the executive platform for the proxy image recognition service program;
- Fetch the lite version of the proxy image recognition model and the enhanced dataset from local storage for the following enhanced training;
- Train the proxy image recognition model using the enhanced dataset. Then, deploy the model and optimize the model into the proxy image recognition service;
- Operate the dew version of the license plate recognition service.
4. Evaluation
5. Discussion
5.1. Architecture Quality
- Maintainability: In cloud-dew architecture, change may occur in the cloud or on-premise. Making changes in software, whether for improvement or for the debugging process, is not an easy task. In our architecture, the dew server is responsible for the core task of providing dew services. As we constructed the dew server on the LAN-level, the deployment issue can be reduced to once rather than be installed again each time a new client machine uses the system. Moreover, every client’s machine has a different operating environment, and we cannot ensure that the deployment of dew software can avoid software conflict problems. Although LAN-level dew architecture may suffer the heavy-weight of architectural problems, it can largely reduce maintenance and deployment issues and increase the dew service’s reliability and sustainability. It is very important that software be easy to maintain, as it affects whether the system is acceptable for the user or not.
- Extensibility: Similarly, LAN-level dew architecture has a better ability to handle the addition of new functionalities and components through dew function decoupling in LAN design.
- Simplicity and understandability: Like the principle of Occam’s razor—”the simplest explanation is usually the best one”—making architecture as simple as possible usually makes it more explainable and understandable for the following missions. Although our architecture may be large and heavy, the mechanism is transparent and understandable. The fact that it is not a black box brings more flexibility and reduces its complexity. An understandable form of architecture is more maintainable, extensible, and reliable.
- Re-usability: Reusing software components makes development and design more responsive. Making a software architecture reusable is often very valuable to that software’s robustness. Herein, we reused the machine learning model from the cloud site and converted it into a lite version, resulting in a more robust architecture with exceptional handling.
- Performance: As the previous evaluation section presented, our smart parking system emphasized the performance of the license plate recognition service. Thus, cloud-dew architecture is able to keep the performance stable when the Internet is interrupted.
5.2. Cloud-Dew Service Model
6. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lin, T.; Rivano, H.; Mouël, F.L. A Survey of Smart Parking Solutions. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3229–3253. [Google Scholar] [CrossRef]
- Pham, T.N.; Tsai, M.; Nguyen, D.B.; Dow, C.; Deng, D. A Cloud-Based Smart-Parking System Based on Internet-of-Things Technologies. IEEE Access 2015, 3, 1581–1591. [Google Scholar] [CrossRef]
- Farooqi, N.; Alshehri, S.; Nollily, S.; Najmi, L.; Alqurashi, G.; Alrashedi, A. UParking: Developing a Smart Parking Management System Using the Internet of Things. In Proceedings of the 2019 Sixth HCT Information Technology Trends (ITT), Ras Al Khaimah, United Arab Emirates, 20–21 November 2019. [Google Scholar]
- Wang, Y. Definition and Categorization of Dew Computing. Open J. Cloud Comput. 2016, 3, 1–7. [Google Scholar] [CrossRef]
- Fox, R.; Hao, W. Internet Infrastructure: Networking, Web Services, and Cloud Computing; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Yu, Y.-C. A Dew Computing Architecture for Smart Parking System with Cloud Image Recognition Service. In Proceedings of the 2021 IEEE 45th Annual Computers, Software, and Applications Conference (COMPSAC), Madrid, Spain, 12–16 July 2021; pp. 1805–1809. [Google Scholar] [CrossRef]
- Manville, M.; Shoup, D. Parking, people, and cities. J. Urban Plan. Develop. 2005, 131, 233–245. [Google Scholar] [CrossRef]
- Naji, B.; Abdelmoula, C.; Masmoudi, M. A Real Time Algorithm for Versatile Mode Parking System and Its Implementation on FPGA Board. Appl. Sci. 2022, 12, 655. [Google Scholar] [CrossRef]
- Mufaqih, M.S.; Kaburuan, E.R.; Wang, G. Applying smart parking system with internet of things (IoT) design. IOP Conf. Ser. Mater. Sci. Eng. 2020, 725, 012095. [Google Scholar] [CrossRef]
- Shih, S.E.; Tsai, W.H. A Convenient Vision-Based System for Automatic Detection of Parking Spaces in Indoor Parking Lots Using Wide-Angle Cameras. IEEE Trans. Veh. Technol. 2014, 63, 2521–2532. [Google Scholar] [CrossRef]
- Ashqer, M.I.; Bikdash, M. Parking Lot Space Detection Based On Image Processing. In Proceedings of the 2019 SoutheastCon, Huntsville, AL, USA, 11–14 April 2019. [Google Scholar]
- Anggawijaya, Y.M.; Weng, T.; Herawati, R. Energy Aware Parking Lot Availability Detection Using YOLO on TX2. In Proceedings of the 2019 3rd International Conference on Informatics and Computational Sciences (ICICoS), Semarang, Indonesia, 29–30 October 2019. [Google Scholar]
- Yi, P.; Guangchun, L. Cloud computing, fog computing, and dew computing. ZTE Commun. 2019, 15, 1–2. [Google Scholar]
- Wang, Y. Cloud-dew Architecture. Int. J. Cloud Comput. 2015, 4, 199–210. [Google Scholar] [CrossRef]
- Ray, P.P. An Introduction to Dew Computing: Definition, Concept and Implications. IEEE Access 2018, 6, 723–737. [Google Scholar] [CrossRef]
- Wang, Y.; Leblanc, D. Integrating SaaS and SaaP with Dew Computing. In Proceedings of the 2016 IEEE International Conferences on Big Data and Cloud Computing (BDCloud), Social Computing and Networking (SocialCom), Sustainable Computing and Communications (SustainCom) (BDCloud-SocialCom-SustainCom), Atlanta, GA, USA, 8–10 October 2016; pp. 590–594. [Google Scholar] [CrossRef]
- Gushev, M. Dew Computing Architecture for Cyber-Physical Systems and IoT. Internet Things 2020, 11, 100186. [Google Scholar] [CrossRef]
- Loncar, P. Data-Intensive Computing Paradigms for Big Data. In Proceedings of the 29th International DAAAM Symposium, Zadar, Croatia, 24–27 October 2018; pp. 1010–1018. [Google Scholar]
- Ghosh, S.; De, D. DewGame: D2D communication enabled dew computing for 5G IoT using coalition formation game. J. Supercomput. 2023, in press. [Google Scholar] [CrossRef]
- Gusev, M.; Wang, Y. Formal Description of Dew Computing. In Proceedings of the 3rd International Workshop on Dew Computing, Riverton, NJ, USA, 29–31 October 2018; pp. 8–13. [Google Scholar]
- Martin, W.; Sarro, F.; Jia, Y.; Zhang, Y.; Harman, M. A Survey of App Store Analysis for Software Engineering; University College London Research Note RN/16/02; UCL Department of Computer Science: London, UK, 2016. [Google Scholar]
- Wang, Y. An API for Dew Computing Services. In Proceedings of the 2021 IEEE 45th Annual Computers, Software, and Applications Conference (COMPSAC), Madrid, Spain, 12–16 July 2021; pp. 1801–1804. [Google Scholar] [CrossRef]
- Mishra, K.; Rajareddy, G.N.; Ghugar, U.; Chhabra, G.S.; Gandomi, A.H. A Collaborative Computation and Offloading for Compute-intensive and Latency-sensitive Dependency-aware Tasks in Dew-enabled Vehicular Fog Computing: A Federated Deep Q-Learning Approach. IEEE Trans. Netw. Serv. Manag. 2023, in press. [Google Scholar] [CrossRef]
- Lin, T.-T.; Rustia, D.J.A. Trends of AIoT Application in Smart Agriculture. 2019. Available online: https://ap.fftc.org.tw/article/1636 (accessed on 16 June 2023).
- Leveraging the Upcoming Disruptions from AI and IoT. Available online: https://www.pwc.es/es/publicaciones/digital/pwc-ai-and-iot.pdf (accessed on 16 June 2023).
- Utomo, P.; Falahah. Dew Computing: Concept and Its Implementation Strategy. In Proceedings of the 2020 Fifth International Conference on Informatics and Computing (ICIC), Gorontalo, Indonesia, 3–4 November 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Géron, A. Hands-On Machine Learning with Scikit-Learn, Keras, and Tensorflow: Concepts, Tools, and Techniques to Build Intelligent Systems; O’Reilly Media: Sebastopol, CA, USA, 2019. [Google Scholar]
- Benchmarking TensorFlow and TensorFlow Lite on the Raspberry Pi. Available online: https://www.hackster.io/news/benchmarking-tensorflow-and-tensorflow-lite-on-the-raspberry-pi-43f51b796796 (accessed on 16 June 2023).
- Coulin, T.; Detante, M.; Mouchère, W.; Petrillo, F. Software Architecture Metrics: A literature review. arXiv 2019, arXiv:1901.09050. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Category | Resource in Dew | Default Carrier | Key Function | Applications (Use Case) |
|---|---|---|---|---|
| WiD | A fraction of web content | PC | Access a fraction of the web without Internet connection | |
| STiD | Storage | PC | Storage in dew has a cloud copy | Dropbox |
| DBiD | Database | PC | Local database has a cloud backup | |
| SiD | Software | PC | Software ownership and settings have a cloud copy | Apple App Store Google play |
| PiD | Platform/Library | PC | SDK and projects have a cloud copy | GitHub |
| IaD | Computer/VM/Container | PC | On-premise computer settings and data have a cloud copy | |
| DiD | Data in forms other than above | PC | Dew computing applications not in above categories | Novell Groupwise 7 |
| SaaDS/SaaDP | Software suite/Product | PC/VM | Local and distributed software access | |
| IaaDS | Virtualized system | PC/VM | Regeneration of cloud platform and relevant services | |
| MLiD/DaaDS | A proxy of cloud AI services on LAN | PC/VM/LAN server | A lite cloud AI service on LAN without Internet connection | Smart parking system |
| MMiD/MaaDS | Vehicular Fog Computing (VFC) networks | Vehicular MCUs | Performs computations, communications, offloading, and resource utilization, considering the latency and energy consumption | Vehicular computing |
| Uncertainty | |||
|---|---|---|---|
| Recognizable | Unrecognizable | Arch. Bias | |
| Cloud arch. | 0.98 | 0.02 | NA |
| Dew arch. (normal model) | 0.84 | 0.16-x | X1 |
| Dew arch. (lite model) | 0.806 | 0.194-x | X2 |
| SaaDS | PaaDS | IaaDS | |
|---|---|---|---|
| Pros | Cloud computing on SaaS has the advantages of immediate access, no software management issues, and simple scalability. | Cloud computing on PaaS has the advantages of simple management and development convenience. | Cloud computing on IaaS has the advantages of cost control, a pay-as-you-go model, and horizontal scale-out. |
| Dew computing makes the software configuration available no matter whether the Internet is connected or not (cross-platform and cross-network). | Dew computing benefits the complicated and advanced function of PaaS, making it available when the internet is down. | Dew computing converts the IaaS into a dual-infrastructure framework (a fail-over feature) | |
| Cons | Cloud computing on SaaS has the disadvantages of a lack of control over the underlying infrastructure and the fact that integration with internal applications is difficult. | Cloud computing on PaaS has the disadvantages of difficulty meeting instant and unpredictable spikes in demand, unique services and configurations, and difficulty changing the PaaS platform. | Cloud computing on PaaS has the disadvantages of complex security controls and dependency on the IaaS provider. |
| Dew computing makes software deployment more difficult (cloud and on-premise) and the configuration experiences more frequent conflicts. | Dew computing makes the above problems more serious. | Dew computing requires that the IaaS provider have the ability to construct a dew service. | |
| Construction difficulty | Dew services need a mechanism to add dew versions of software. | Dew services need mechanisms by which to add dew versions of platforms or platform functions. | Dew services need mechanisms to add dew versions of infrastructure or parts of it. |
| The difficulty is minor. | The difficulty is significant, as the platform function is built from scratch again. | The difficulty is significant, but depends on the practice of the business domain. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.-C. Smart Parking System Based on Edge-Cloud-Dew Computing Architecture. Electronics 2023, 12, 2801. https://doi.org/10.3390/electronics12132801
Yu Y-C. Smart Parking System Based on Edge-Cloud-Dew Computing Architecture. Electronics. 2023; 12(13):2801. https://doi.org/10.3390/electronics12132801
Chicago/Turabian StyleYu, Yuan-Chih. 2023. "Smart Parking System Based on Edge-Cloud-Dew Computing Architecture" Electronics 12, no. 13: 2801. https://doi.org/10.3390/electronics12132801
APA StyleYu, Y.-C. (2023). Smart Parking System Based on Edge-Cloud-Dew Computing Architecture. Electronics, 12(13), 2801. https://doi.org/10.3390/electronics12132801