
Performance Enhancement of CAN/Ethernet Automotive Gateway with a CAN Data Reduction Algorithm



Abstract
1. Introduction
2. Related Work
2.1. Gateway
2.2. CAN Data Reduction
2.2.1. Enhanced Data Reduction
2.2.2. Quotient Remainder Compression
2.2.3. Boundary of Fifteen Compression
3. Proposed Gateway System
3.1. Gateway Implementation
3.1.1. Hardware Configuration
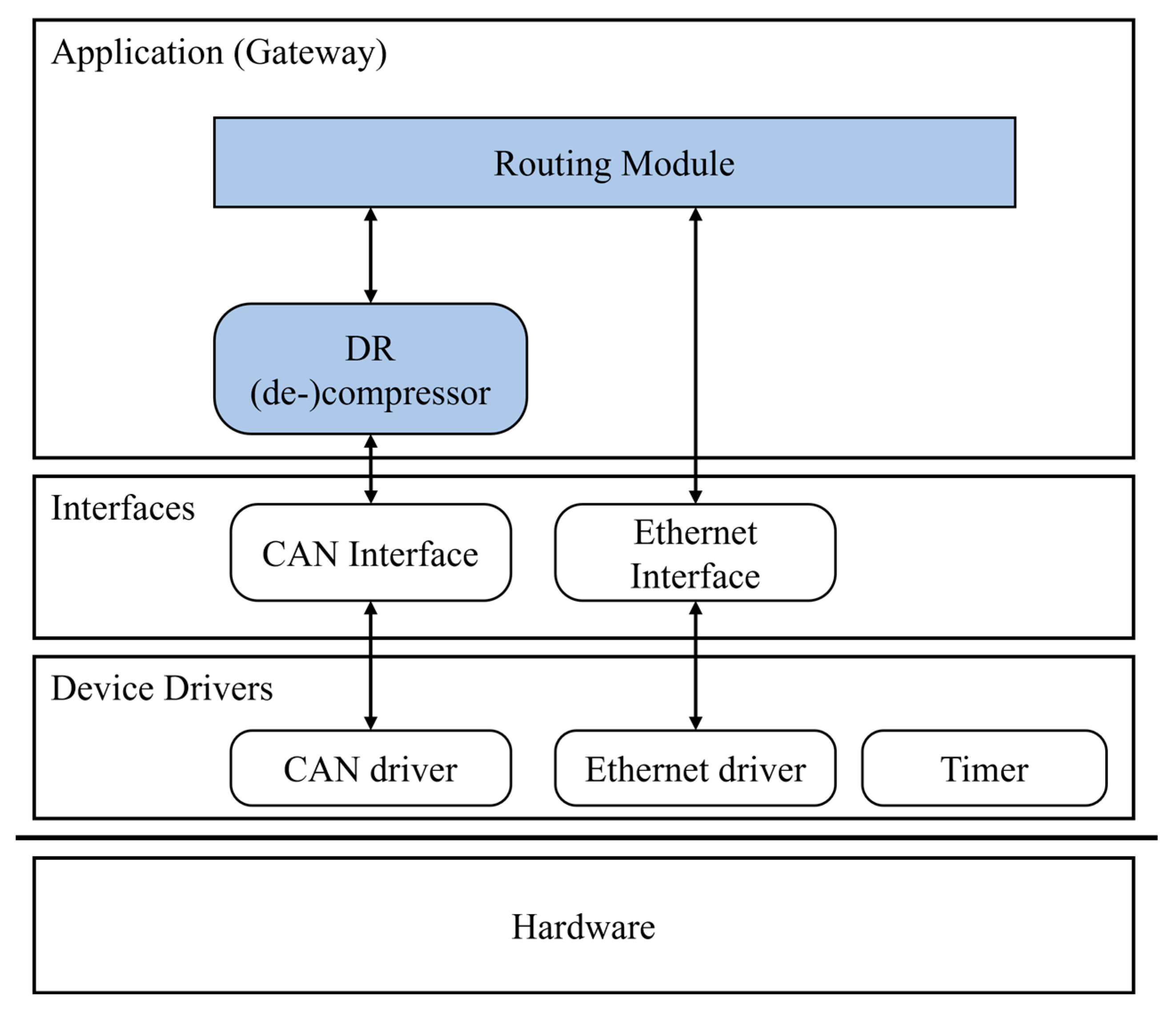
3.1.2. Software Configuration
3.2. Data Reduction Mechanism
3.3. Routing
4. Results and Discussion
4.1. Experimental Environment
4.2. Performance Analysis
4.2.1. Compression Ratio and CAN Busload
4.2.2. Processing and Delay Time
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kim, S.H.; Seo, S.H.; Kim, J.H.; Moon, T.M.; Son, C.W.; Hwang, S.H.; Jeon, J.W. A gateway system for an automotive system: LIN, CAN, and FlexRay. In Proceedings of the 6th IEEE International Conference on Industrial Informatics, Daejeon, Republic of Korea, 13–16 July 2008. [Google Scholar]
- Kelkar, S.; Kamal, R. Boundary of fifteen compression algorithm for controller area network based automotive applications. In Proceedings of the International Conference on Circuits, Systems, Communications and Information Technology Applications, Mumbai, India, 4–5 April 2014. [Google Scholar]
- Miucic, R.; Mahmud, S.M.; Popovic, Z. An Enhanced Data-Reduction Algorithm for Event-Triggered Networks. IEEE Trans. Veh. Technol. 2009, 58, 2663–2678. [Google Scholar] [CrossRef]
- Oh, S.B.; Kim, J.H. Comparison and Analysis of Controller Area Network Compression Algorithms. KSAE 2020, 28, 629–636. [Google Scholar] [CrossRef]
- Misbahuddin, S.; Mahmud, S.M.; Al-Holou, N. Development and Performance Anaylsis of a Data-Reduction Algorithm for Automotive Multiplexing. IEEE Trans. Veh. Technol. 2001, 50, 162–169. [Google Scholar] [CrossRef]
- Kim, Y.J.; Zou, Y.; Kim, Y.E.; Chung, J.G. Multi-Level Data Arrangement Algorithm for CAN Data Compression. Int. J. Automot. Technol. 2020, 21, 1527–1537. [Google Scholar] [CrossRef]
- Daoud, R.M.; Amer, H.H.; Elsayed, H.M.; Sallez, Y. Ethernet-based car control network. In Proceedings of the Canadian Conference on Electrical and Computer Engineering, Ottawa, ON, Canada, 7–10 May 2006. [Google Scholar]
- Navet, N.; Song, Y.; Simonot-Lion, F.; Wilwert, C. Trends in Automotive Communication Systems. Proc. IEEE. 2005, 93, 1204–1223. [Google Scholar] [CrossRef]
- Seo, S.H.; Kim, J.H.; Moon, T.Y.; Hwang, S.H.; Kwon, K.H.; Jeon, J.W. A Reliable Gateway for In-Vehicle Networks. ACM Trans. Embedded Comput. Syst. 2012, 11, 1–24. [Google Scholar] [CrossRef]
- Oh, S.B.; Lee, M.J.; Jeon, J.W. Efficient data communication automotive gateway system for CAN-Ethernet networks. In Proceedings of the 17th International Conference on Ubiquitous Information Management and Communication, Seoul, Republic of Korea, 3–5 January 2023. [Google Scholar]
- Kim, J.H.; Seo, S.H.; Nguyen, T.; Cheon, B.M.; Lee, Y.S.; Jeon, J.W. Gateway Framework for In-Vehicle Networks based on CAN, FlexRay and Ethernet. IEEE Trans. Veh. Technol. 2015, 64, 4472–4486. [Google Scholar] [CrossRef]
- Lee, Y.S.; Kim, J.H.; Jeon, J.W. FlexRay and Ethernet AVB Synchronization for High QoS Automotive Gateway. IEEE Trans. Veh. Technol. 2017, 66, 5737–5751. [Google Scholar] [CrossRef]
- Lee, T.Y.; Lin, I.A.; Liao, R.H. Design of a FlexRay/Ethernet Gateway and Security Mechanism for In-Vehicle Networks. Sensors 2020, 20, 641. [Google Scholar] [CrossRef] [PubMed]
- Kern, A.; Reinhard, D.; Streichert, T.; Teich, J. Gateway Strategies for Embedding of Automotive CAN-Frames into Ethernet-Packets and Vice Versa. In Proceedings of the 24th International Conference on Architecture of Computing Systems, Lake Como, Italy, 24–25 February 2011; pp. 259–270. [Google Scholar]
- Postolache, M.; Neamtu, G.; Trofin, S.D. CAN-Ethernet gateway for automotive applications. In Proceedings of the 17th International Conference on System Theory, Control and Computing, Sinaia, Romania, 11–13 October 2013. [Google Scholar]
- Kim, H.J.; Lee, U.; Kim, M.; Lee, S. Time-Synchronization Method for CAN-Ethernet Networks with Gateways. Appl. Sci. 2020, 10, 8873. [Google Scholar] [CrossRef]
- Rui, Z.; Gui-He, Q.; Jia-Qiao, L. Gateway system for CAN and FlexRay in automotive ECU networks. In Proceedings of the International Conference on Information, Networking and Automation, Kunming, China, 18–19 October 2010. [Google Scholar]
- Kim, D.Y.; Jung, M.W.; Kim, S.H. An Internet of Vehicles Access Gateay Design Considering the Efficiency of the In-Vehicle Ethernet Backbone. Sensors 2021, 21, 98. [Google Scholar] [CrossRef]
- Brunner, S.; Roder, J.; Kucera, M.; Waas, T. Automotive E/E-architecture enhancements by usage of Ethernet TSN. In Proceedings of the 13th Workshop on Intelligent Solutions in Embedded Systems, Hamburg, Germany, 12–13 June 2017. [Google Scholar]
- Hu, S.; Zhang, Q.; Weimerskirch, A.; Mao, Z.M. Gatekeeper: A gateway-based broadcast authentication protocol for the in-vehicle Ethernet. In Proceedings of the 2022 ACM on Asia Conference on Computer and Communications Security, Nagasaki, Japan, 30 May–3 June 2022. [Google Scholar]
- Reindardt, D.; Kucera, M. Domain controlled architecture. In Proceedings of the Third International Conference on Pervasive and Embedded Computing and Communication Systems, Barcelona, Spain, 19–21 February 2013. [Google Scholar]
- Kelkar, S.; Kamal, R. Control area network based quotient remainder compression-algorithm for automotive applications. In Proceedings of the 38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012. [Google Scholar]
- Lee, M.J.; Oh, S.B.; Kim, Y.S.; Kim, J.H. Divisor and QR Parameter Optimization in QRC to Improve the Compression Rate. Int. J. Automot. Technol. 2023, 24, 889–899. [Google Scholar] [CrossRef]
- Wu, Y.; Li, J.; Xu, Y.; Chung, J.G.; Dai, Y.; Xu, Y. Dynamic Rearrangement Compression Algorithm for Intelligent Connected Vehicles. IEEE Trans. Veh. Technol. 2022, 71, 10350–10360. [Google Scholar] [CrossRef]
- Kelkar, S.; Kamal, R. Comparison and analysis of quotient remainder compression-algorithms for automotives. In Proceedings of the 2012 Annual IEEE India Conference, Kochi, India, 7–9 December 2012. [Google Scholar]
- Wu, Y.; Chung, J.G. An Improved Controller Area Network Data-Reduction Algorithm for In-Vehicle Networks. Ieice Fund. Electr. 2017, 100, 346–352. [Google Scholar] [CrossRef]
- Jin, S.; Kim, Y.; Chung, J.; Kim, Y. CAN data compression based on sorting and mapping method. In Proceedings of the 18th International SoC Design Conference, Jeju Island, Republic of Korea, 6–9 October 2021. [Google Scholar]
- Wu, Y.J.; Chung, J.G. Efficient Controller Area Network Data Compression for Automobile Applications. Front. Inf. Technol. Electron. Eng. 2015, 16, 70–78. [Google Scholar] [CrossRef]
- Infineon, TC27x D-Step User Manual. Available online: https://www.infineon.com (accessed on 26 May 2023).
- Infineon, KIT_A2G_TC377_SEC_GTW. Available online: https://www.infineon.com/cms/en/product/evaluation-boards/kit_a2g_tc377_sec_gtw/ (accessed on 18 June 2023).
- Infineon, KIT_A2G_TC397_24V_GTW. Available online: https://www.infineon.com/cms/en/product/evaluation-boards/kit_a2g_tc397_24v_gtw/ (accessed on 18 June 2023).
- NXP, S32G3 Vehicle Networking Reference Design. Available online: https://www.nxp.com/design/designs/s32g3-vehicle-networking-reference-design:S32G-VNP-RDB3 (accessed on 18 June 2023).
- Kim, Y.J.; Woo, S.; Chung, J.G. Triple ID Flexible MAC for CAN Security Improvement. IEEE Access. 2021, 9, 126388–126399. [Google Scholar] [CrossRef]
- Piao, J.; Jin, S.; Seo, D.H.; Woo, S.; Chung, J.G. MAC-Based Compression Ratio Improvement for CAN Security. Appl. Sci. 2023, 13, 2654. [Google Scholar] [CrossRef]
- Kim, W.; Lee, J.; Lee, Y.; Kim, Y.; Chung, J.; Woo, S. Vehicular Multilevel Data Arrangement-Based Intrusion Detection System for In-Vehicle CAN. Secur. Commun. Netw. 2022, 2022, 4322148. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | IVN Protocols | Features |
|---|---|---|
| Kim [11] | CAN Ethernet FlexRay | Frame, signal, PDU-based routing between the CAN, FlexRay, and Ethernet. Supporting parallel reprogramming. Diagnostic routing between DoIP and UDSs. GUI-based configuration software. |
| Lee [12] | Ethernet AVB FlexRay | Exchanging data between FlexRay and Ethernet AVB. Time synchronization between FlexRay and Ethernet AVB network. |
| Lee [13] | Ethernet FlexRay | Transforming and exchanging data between FlexRay and Ethernet. Security data transmission mechanism for cybersecurity. |
| Kern [14] | CAN Ethernet | The transformation between CAN and Ethernet-IP networks. Buffered, Timed, and urgency transformation methods. |
| Postolache [15] | CAN Ethernet | Packing and unpacking CAN messages in an Ethernet frame. Graphical software for control and diagnosis. |
| Kim [16] | CAN Ethernet | Time synchronization between CAN and Ethernet networks. |
| PC Bits Value | BF Signal Compression Status |
|---|---|
| 00 | no compression |
| 01 | fully compression |
| 10 | BFC compressed (current value > previous value) |
| 11 | BFC compressed (current value < previous value) |
| Method | Main Features |
|---|---|
| EDR [3] | Using delta compression Delta ranges based on signal size |
| QRC [22] | Using quotient and remainder compression QR-range and remainder size based on signal size |
| BFC [2] | Using delta compression Delta range of ±15 regardless of signal size |
| Board | Manufacturer | MCU | Memory | Interfaces |
|---|---|---|---|---|
| KIT_A2G_TC377_SEC_GTW [31] | Infineon | AURIX TC377TX | 6 MB internal Flash/ 4 MB internal SRAM | CAN/CAN FD Ethernet FlexRay LIN |
| KIT_A2G_TC397_24V_GTW [32] | Infineon | AURIX TC397XX | 16 MB internal Flash/ 7 MB internal SRAM | CAN/CAN FD Ethernet FlexRay LIN |
| S32G-VNP-RDB3 [33] | NXP | S32G399A | 20 MB internal RAM | CAN/CAN FD FlexRay LIN Ethernet TSN |
| This paper | - | AURIX TC275 | 4 MB internal Flash/ 384 KB internal RAM | CAN/CAN FD Ethernet |
| CAN | |||
| Baud rate | 500 kBits/s | SJW | 1 |
| Tseg1, Tseg2 | 9, 6 | ||
| Ethernet | |||
| Baud rate | 100 Mbps | Interface | RMII |
| Duplex mode | Full duplex | ||
| CAN ID | Compression Ratio | |
|---|---|---|
| Normal Driving | Rough Driving | |
| 0xA0 | 70.19% | 64.51% |
| 0xA1 | 74.92% | 74.85% |
| 0x1F1 | 62.90% | 59.69% |
| 0x316 | 64.89% | 56.77% |
| 0x4B0 | 62.16% | 58.50% |
| 0x4B1 | 36.98% | 35.65% |
| CAN ID | Number of Bytes Transmitted | |||
|---|---|---|---|---|
| Normal Driving | Rough Driving | |||
| Average | SD | Average | SD | |
| 0xA0 | 2.38 | 0.77 | 2.83 | 0.99 |
| 0xA1 | 2.01 | 0.07 | 2.01 | 0.10 |
| 0x1F1 | 2.96 | 0.63 | 3.22 | 0.65 |
| 0x316 | 2.81 | 1.05 | 3.45 | 1.19 |
| 0x4B0 | 3.02 | 0.61 | 3.31 | 1.02 |
| 0x4B1 | 5.04 | 0.63 | 5.14 | 0.81 |
| Processing Time | Process | |
|---|---|---|
| Compression | Decompression | |
| Average | 2.04 | 1.53 |
| Worst-case | 3.06 | 3.24 |
| SD | 0.069 | 0.606 |
| Delay | CAN Bus Status | |
|---|---|---|
| No Compression | Compression | |
| Average | 236 | 145 |
| Worst-case | 287 | 205 |
| SD | 4.26 | 17.23 |
| E2E Delay | CAN Bus Status | |
|---|---|---|
| No Compression | Compression | |
| Average | 421 | 336 |
| Worst-case | 793 | 703 |
| SD | 59.28 | 60.41 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oh, S.B.; Do, Y.S.; Lee, M.J.; Kim, J.H.; Jeon, J.W. Performance Enhancement of CAN/Ethernet Automotive Gateway with a CAN Data Reduction Algorithm. Electronics 2023, 12, 2777. https://doi.org/10.3390/electronics12132777
Oh SB, Do YS, Lee MJ, Kim JH, Jeon JW. Performance Enhancement of CAN/Ethernet Automotive Gateway with a CAN Data Reduction Algorithm. Electronics. 2023; 12(13):2777. https://doi.org/10.3390/electronics12132777
Chicago/Turabian StyleOh, Sung Bhin, Young Soo Do, Min Jeong Lee, Jin Ho Kim, and Jae Wook Jeon. 2023. "Performance Enhancement of CAN/Ethernet Automotive Gateway with a CAN Data Reduction Algorithm" Electronics 12, no. 13: 2777. https://doi.org/10.3390/electronics12132777
APA StyleOh, S. B., Do, Y. S., Lee, M. J., Kim, J. H., & Jeon, J. W. (2023). Performance Enhancement of CAN/Ethernet Automotive Gateway with a CAN Data Reduction Algorithm. Electronics, 12(13), 2777. https://doi.org/10.3390/electronics12132777