
Three-Dimensional Point Cloud-Filtering Method Based on Image Segmentation and Absolute Phase Recovery

Abstract
:1. Introduction
2. Principle
2.1. Point Cloud Noise Analysis
2.2. Basic Framework
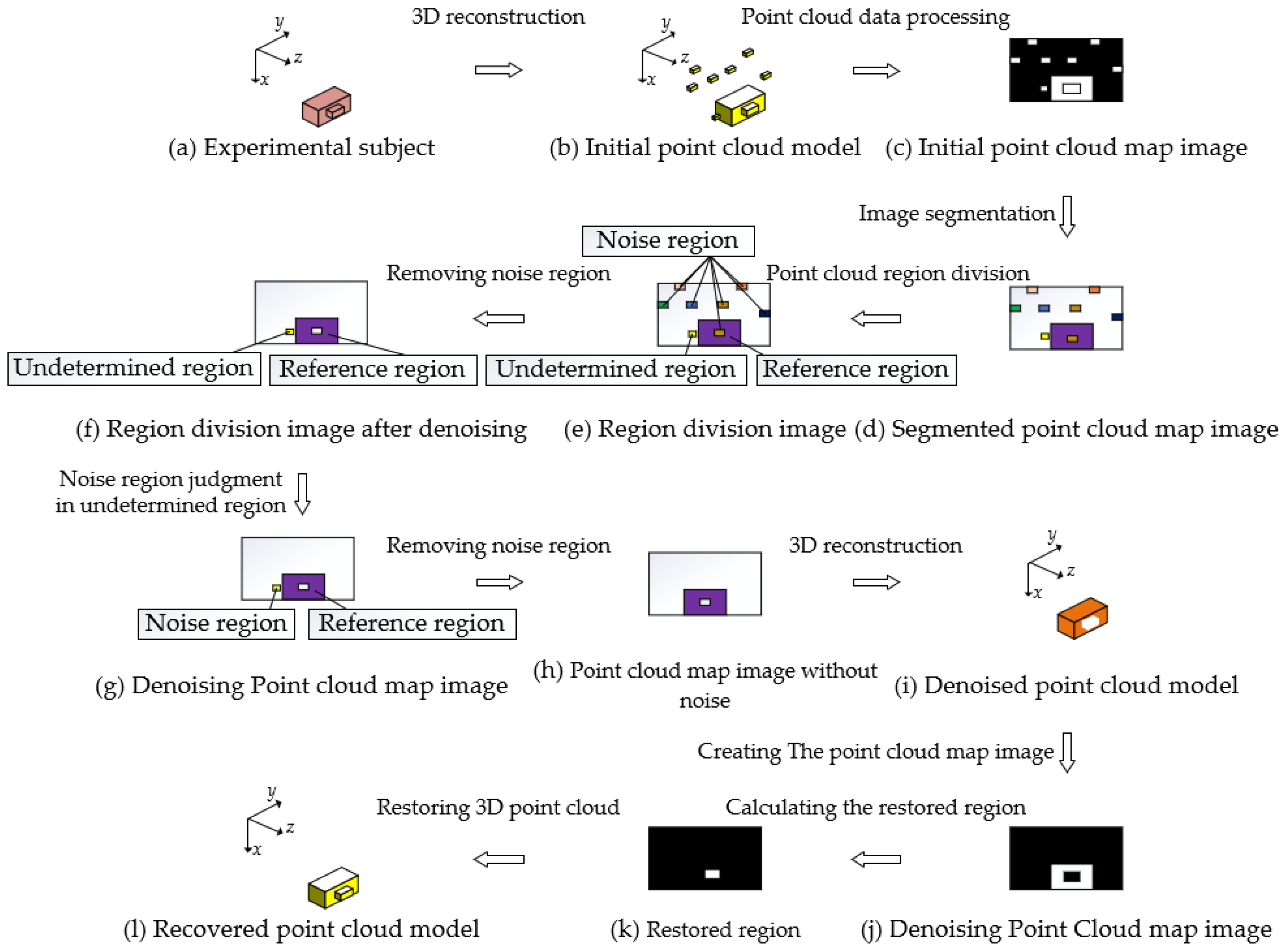
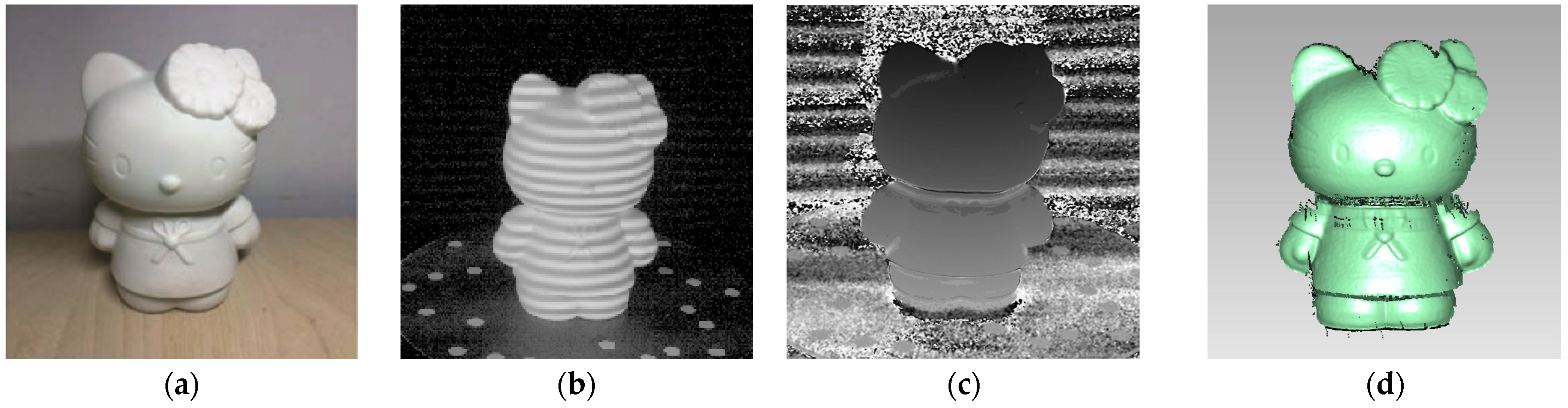
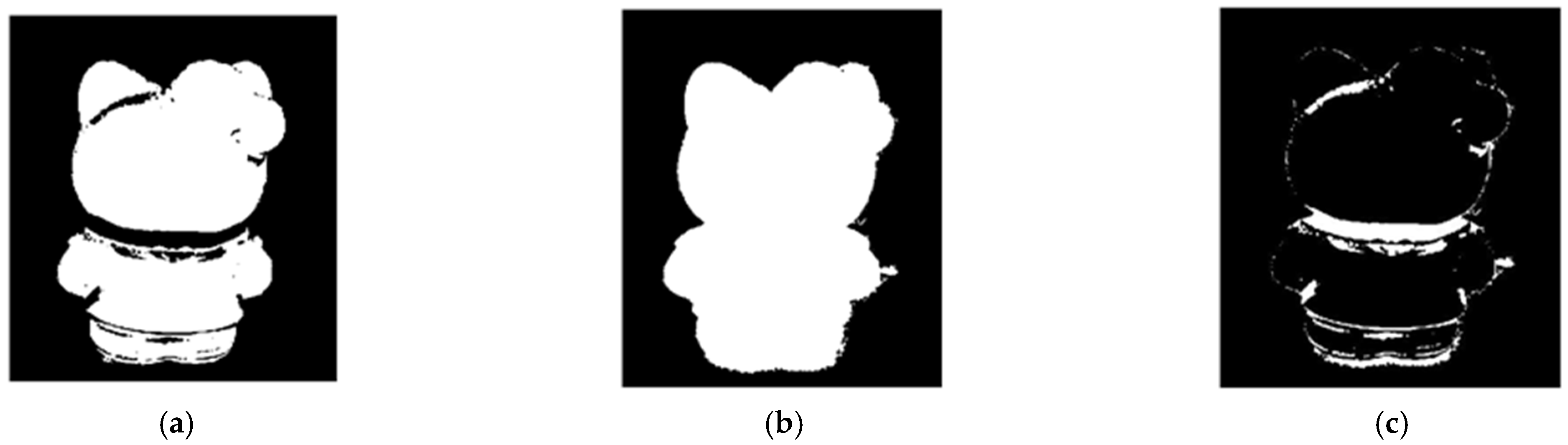
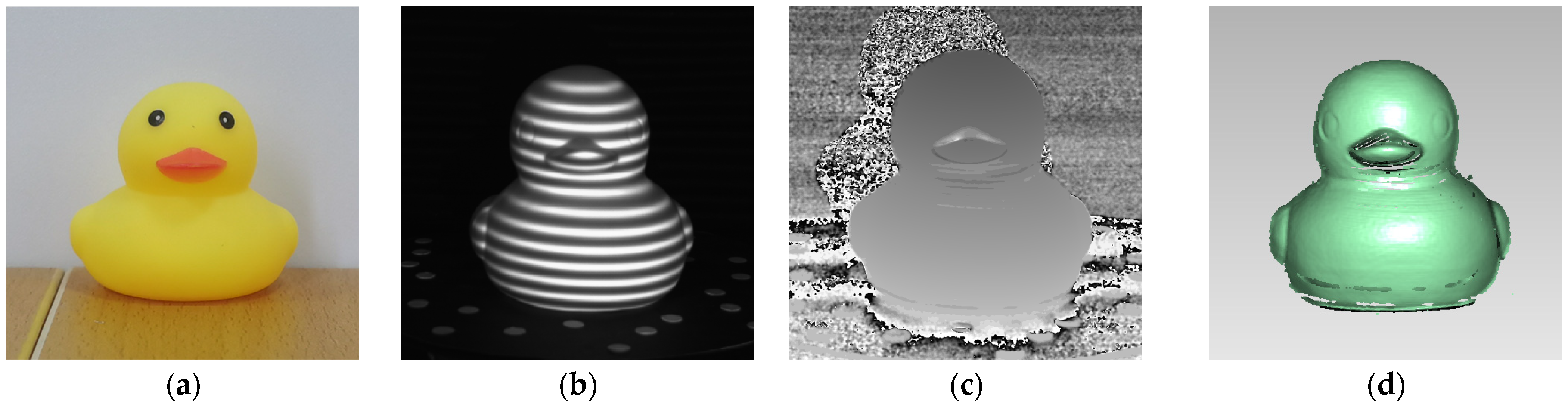
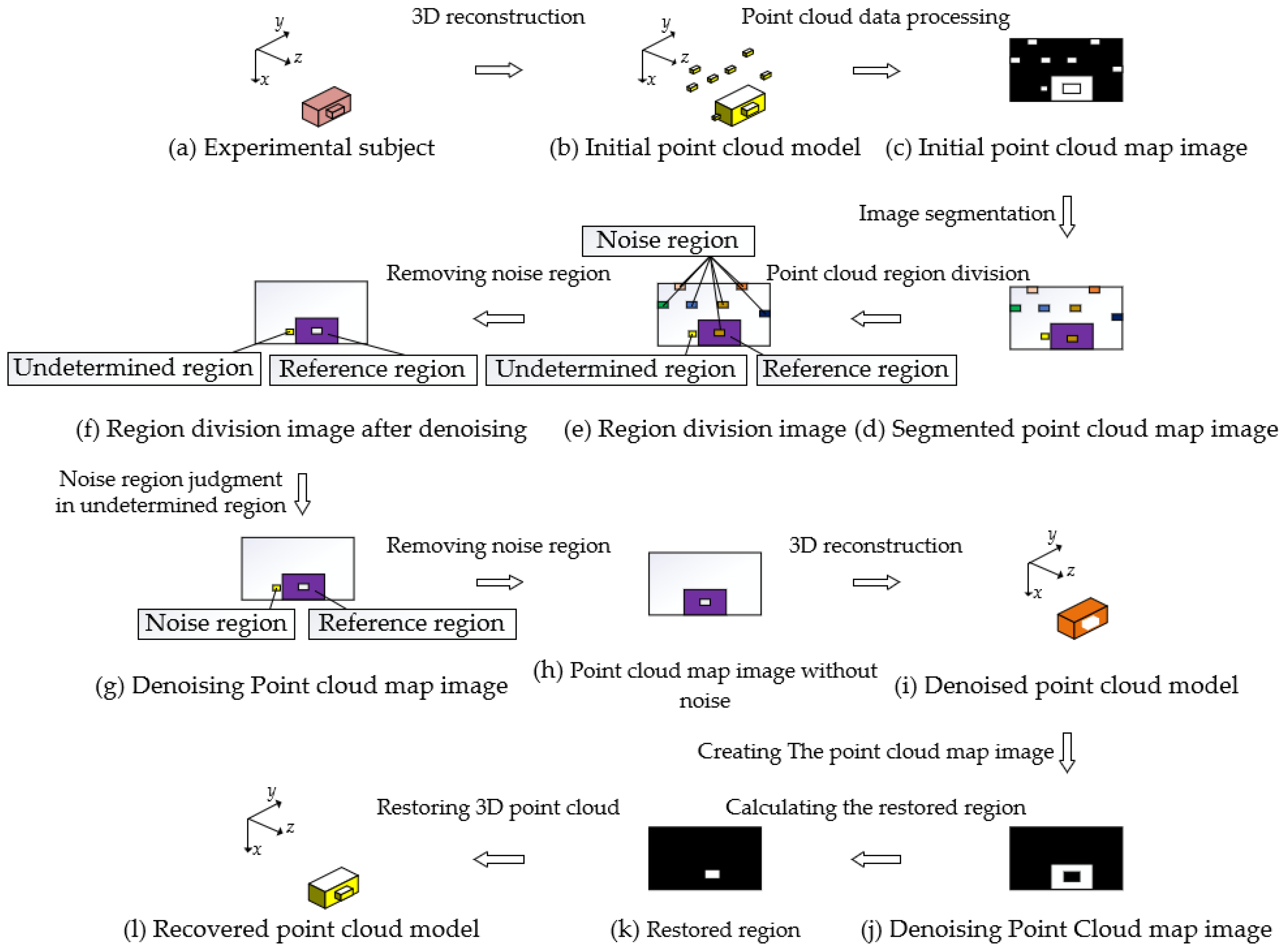
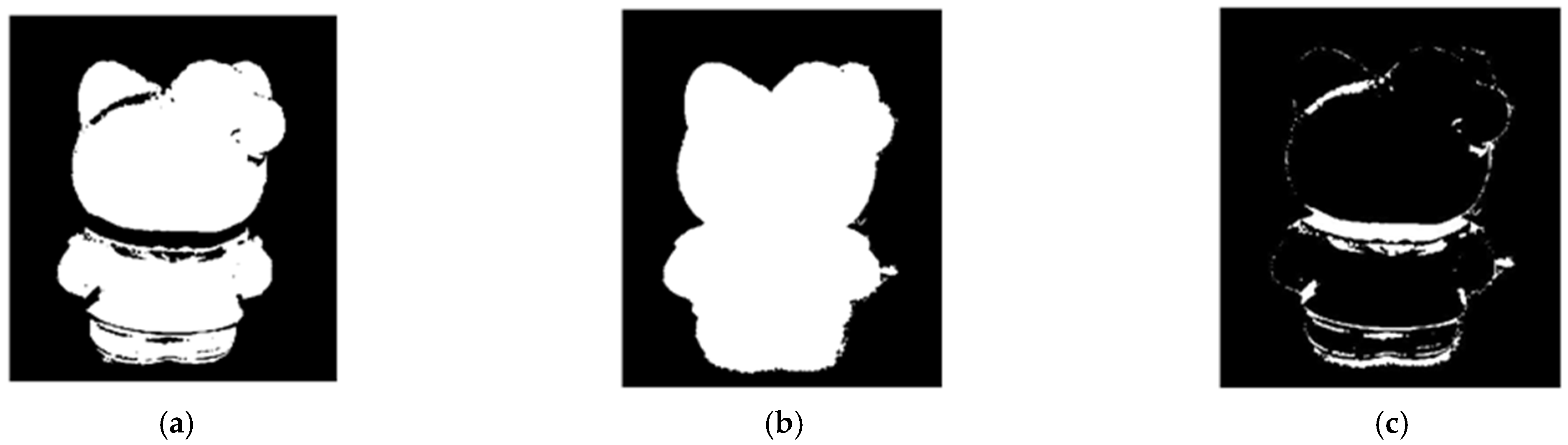
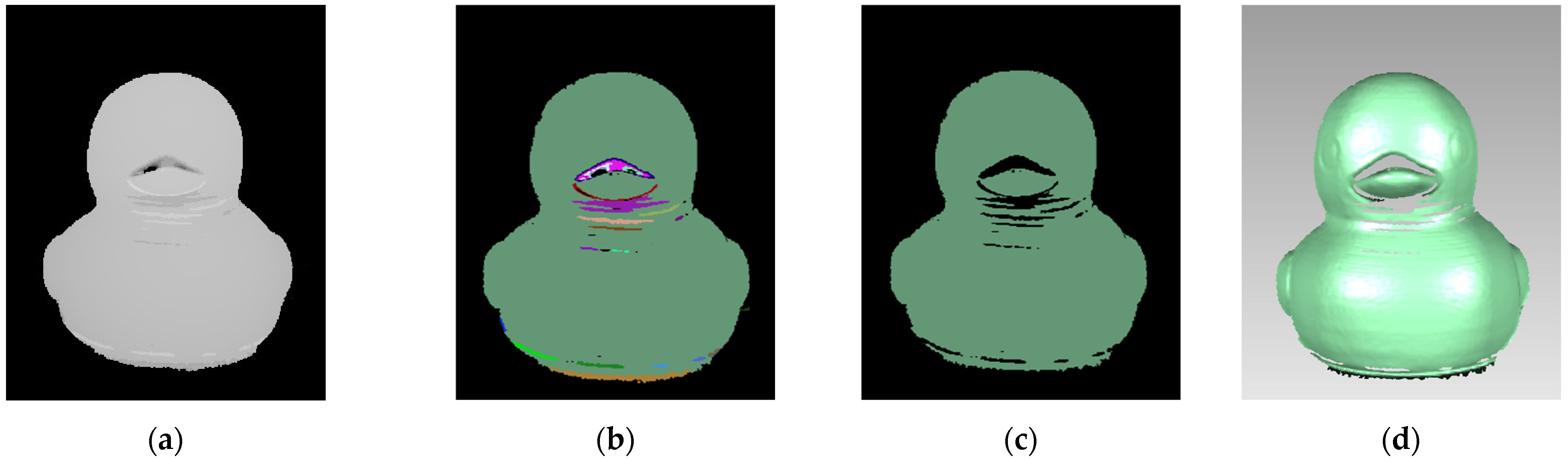
- Image segmentation is performed on the point cloud mapping image, as shown in Figure 2d. Calculate the area of each region and the total region in the point cloud mapping image to judge the noise region and the noise-free region, and then further judge the non-noise region to obtain the reference region without noise and the undetermined region that may have noise, as shown in Figure 2e. The point cloud mapping image in Figure 2f is obtained by removing the judged noise region, which only contains the reference region and the noise region;
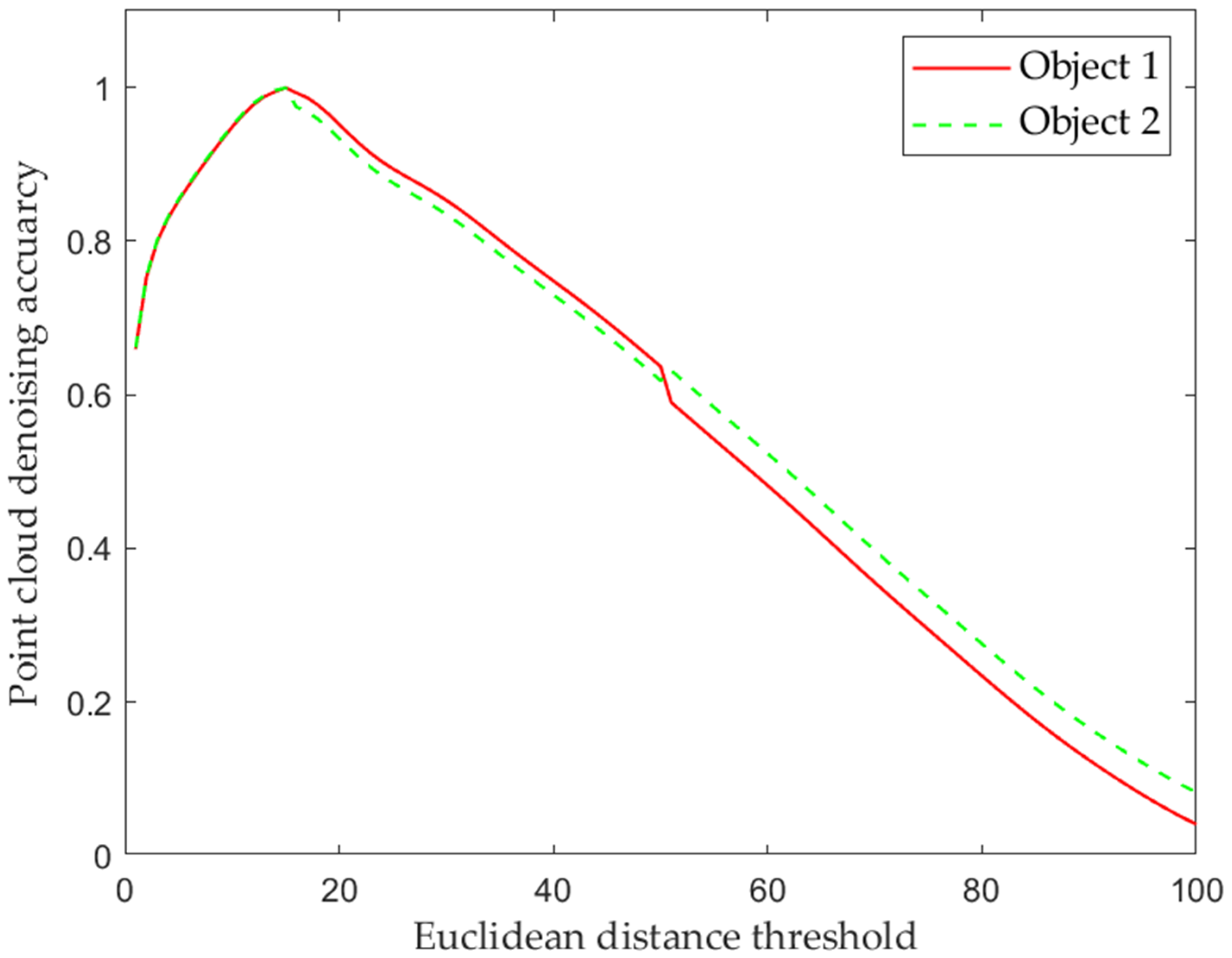
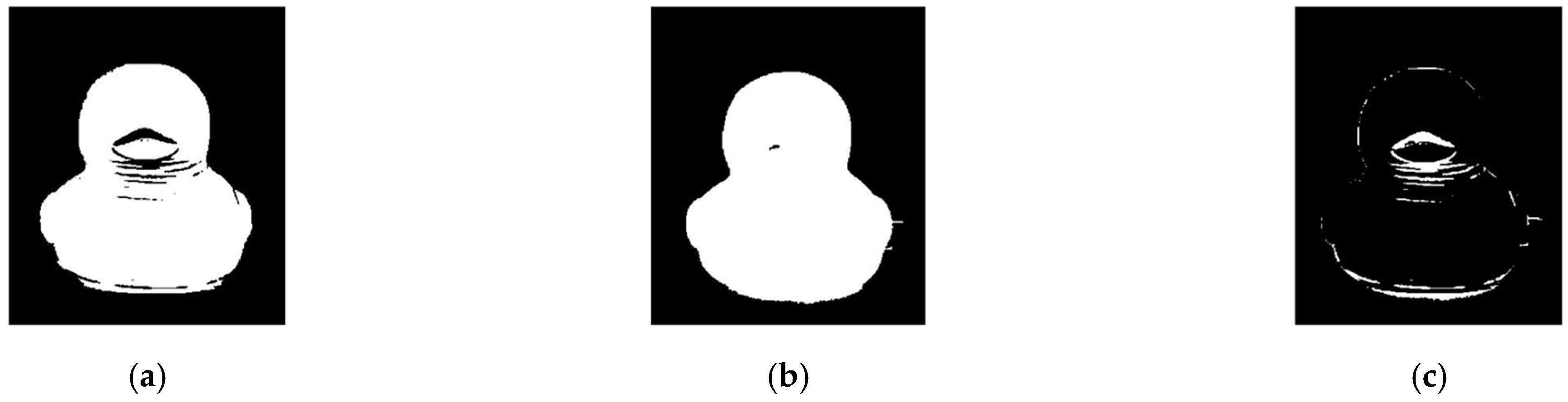
- Determine whether the undetermined region contains noise, fill holes in the reference region, and use the K-nearest neighbor (KNN) algorithm to further judge the undetermined region and the reference region after hole filling to obtain the undetermined region containing noise, as shown in Figure 2g. Calculate the distance between the contour point of the undetermined region of the nearest neighbor point and the three-dimensional point Z of the contour point of the reference region. If the threshold value greater than the set distance is judged as a noise point, the noise region in the image is deleted to obtain Figure 2h;
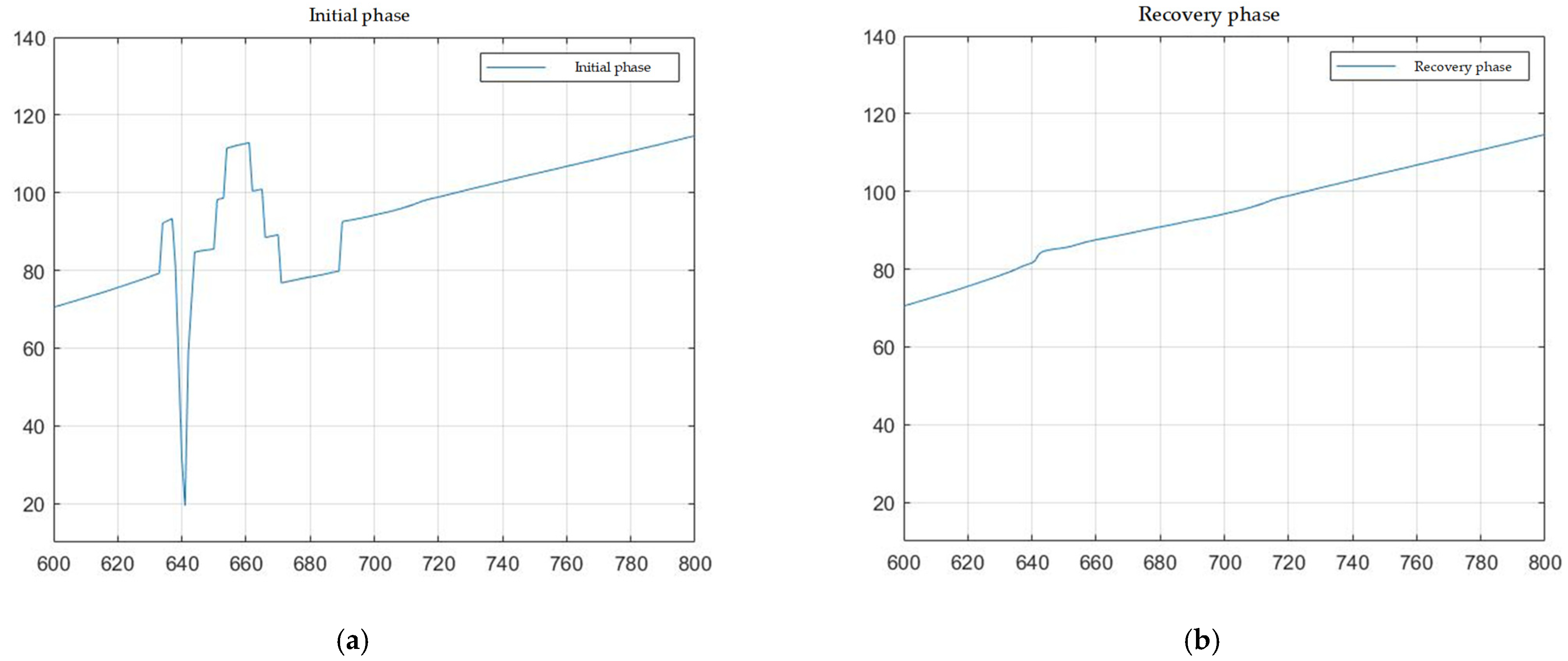
- Restore the point cloud. According to the point cloud mapping image in Figure 2h, absolute phase image, and three-dimensional calibration parameters, the three-dimensional calculation is performed to obtain a three-dimensional point cloud with noise removed. Based on the denoised 3D point cloud, the point cloud mapping binary image is established, and the point cloud mapping binary image in Figure 2c is XORed within the range of the object contour to obtain the point cloud mapping image of the restored region. The point cloud mapping image is 3D reconstructed and added to the denoised 3D point cloud model to obtain the restored 3D point cloud model.
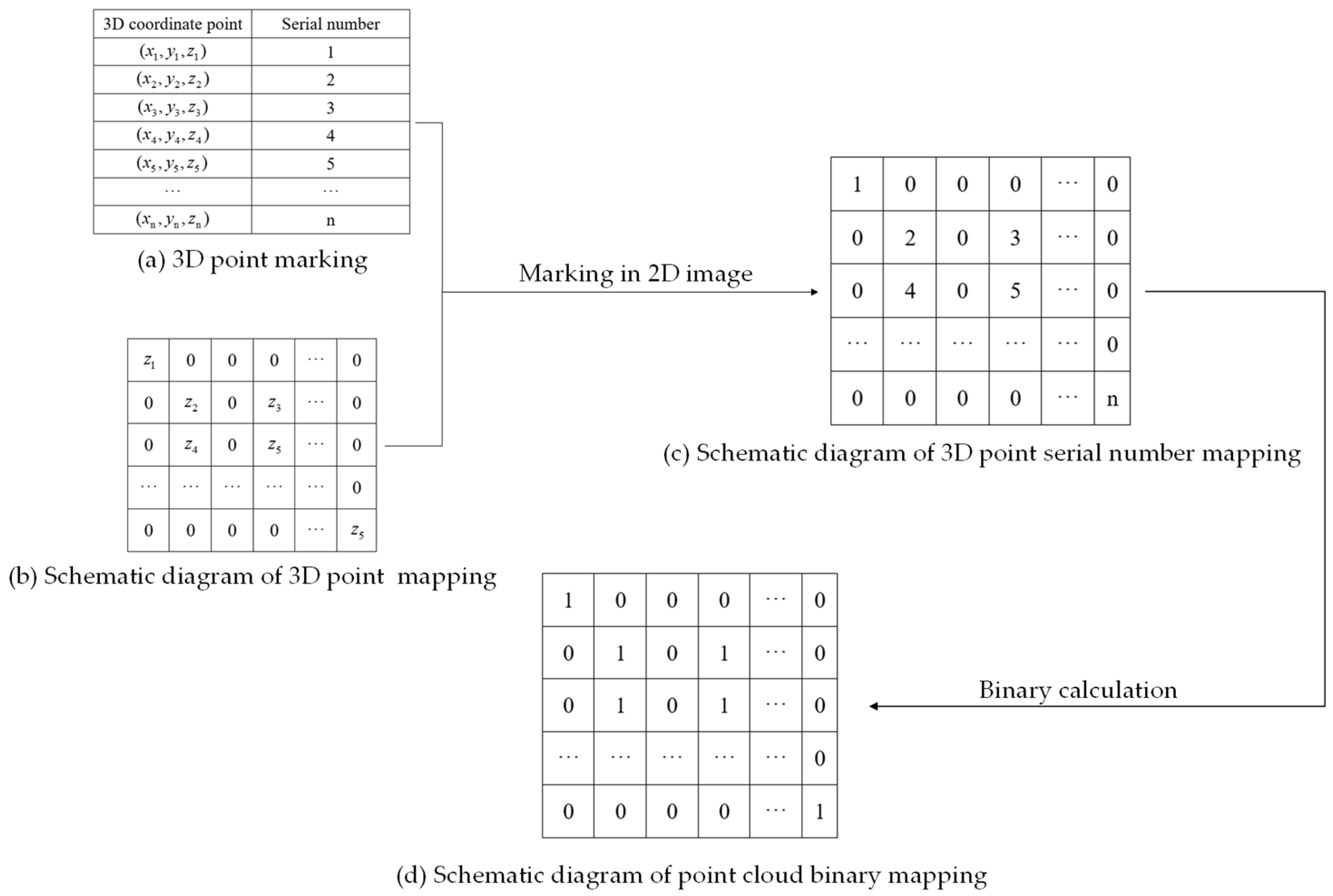
2.3. Point Cloud Mapping Image Creation
2.4. Mapping Image Segmentation
2.5. Noise Regions Judgment
2.6. Point Cloud Restoration
3. Experiments and Discussion
3.1. 3D Point Cloud Data Acquisition
3.2. Point Cloud Denoising Performance Evaluation Indicators
3.3. Point Cloud Denoising Experiment 1
3.4. Point Cloud Denoising Experiment 2
3.5. Parameter Selection Comparison
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Su, X.; Zhang, Q. Dynamic 3-D shape measurement method: A review. Opt. Lasers Eng. 2010, 48, 191–204. [Google Scholar] [CrossRef]
- Zhang, S. High-speed 3D shape measurement with structured light methods: A review. Opt. Lasers Eng. 2018, 106, 119–131. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhu, R.; Zhang, K.; Yu, H.; Bai, L.; Zheng, D.; Han, J. Accurate dynamic 3-D shape measurement based on the fringe pattern super-reconstruction technique. Measurement 2022, 200, 111575. [Google Scholar] [CrossRef]
- Tian, X.; Liu, R.; Wang, Z.; Ma, J. High quality 3D reconstruction based on fusion of polarization imaging and binocular stereo vision. Inf. Fusion 2022, 77, 19–28. [Google Scholar] [CrossRef]
- Hu, Y.; Zhen, W.; Scherer, S. Deep-learning assisted high-resolution binocular stereo depth reconstruction. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 8637–8643. [Google Scholar]
- Wang, X.; Jian, Z.; Ren, M. Non-lambertian photometric stereo network based on inverse reflectance model with collocated light. IEEE Trans. Image Process 2020, 29, 6032–6042. [Google Scholar] [CrossRef]
- Ju, Y.; Dong, J.; Chen, S. Recovering surface normal and arbitrary images: A dual regression network for photometric stereo. IEEE Trans. Image Process 2021, 30, 3676–3690. [Google Scholar] [CrossRef]
- Long, J.; Xi, J.; Zhu, M.; Cheng, W.; Cheng, R.; Li, Z.; Shi, Y. Absolute phase map recovery of two fringe patterns with flexible selection of fringe wavelengths. Appl. Opt. 2014, 53, 1794–1801. [Google Scholar] [CrossRef]
- Ding, Y.; Xi, J.; Yu, Y.; Deng, F.; Cheng, J. Multiple spatial-frequency fringes selection for absolute phase recovery. Surf. Topogr. 2015, 4, 015004. [Google Scholar] [CrossRef]
- Xu, J.; Zhang, S. Status, challenges, and future perspectives of fringe projection profilometry. Opt. Lasers Eng. 2020, 135, 106193. [Google Scholar] [CrossRef]
- Sun, J.; Zhang, Y.; Cheng, X. A high precision 3D reconstruction method for bend tube axis based on binocular stereo vision. Opt. Express 2019, 27, 2292–2304. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Qian, J.; Feng, S.; Chen, Q.; Zuo, C. Deep-learning-enabled dual-frequency composite fringe projection profilometry for single-shot absolute 3D shape measurement. Opto-Electron. Adv. 2022, 5, 210021. [Google Scholar] [CrossRef]
- Li, H.; Wei, H.; Liu, J.; Deng, G.; Zhou, S.; Wang, W.; He, L.; Tian, P. Fringe Projection Profilometry Based on Saturated Fringe Restoration in High Dynamic Range Scenes. Sensors 2023, 23, 3133. [Google Scholar] [CrossRef]
- Li, J.; Li, B. TPDNet: Texture-Guided Phase-to-DEPTH Networks to Repair Shadow-Induced Errors for Fringe Projection Profilometry. Photonics 2023, 10, 246. [Google Scholar] [CrossRef]
- Gao, R.; Li, M.; Yang, S.-J.; Cho, K. Reflective Noise Filtering of Large-Scale Point Cloud Using Transformer. Remote Sens. 2022, 14, 577. [Google Scholar] [CrossRef]
- Chen, H.; Wei, Z.; Li, X.; Xu, Y.; Wei, M.; Wang, J. Repcd-net: Feature-aware recurrent point cloud denoising network. Int. J. Comput. Vis. 2022, 130, 615–629. [Google Scholar] [CrossRef]
- Camuffo, E.; Mari, D.; Milani, S. Recent Advancements in Learning Algorithms for Point Clouds: An Updated Overview. Sensors 2022, 22, 1357. [Google Scholar] [CrossRef] [PubMed]
- Galea, C.; Guillemot, C. Denoising of 3D point clouds constructed from light fields. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 1882–1886. [Google Scholar]
- Leal, E.; Sanchez-Torres, G.; Branch, J.W. Sparse Regularization-Based Approach for Point Cloud Denoising and Sharp Features Enhancement. Sensors 2020, 20, 3206. [Google Scholar] [CrossRef]
- Luo, S.; Hu, W. Score-Based Point Cloud Denoising. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 10–17 October 2021; pp. 4583–4592. [Google Scholar]
- Irfan, M.A.; Magli, E. Joint geometry and color point cloud denoising based on graph wavelets. IEEE Access 2021, 9, 21149–21166. [Google Scholar] [CrossRef]
- Mao, A.; Du, Z.; Wen, Y.H.; Xuan, J.; Liu, Y.J. PD-Flow: A Point Cloud Denoising Framework with Normalizing Flows. In Proceedings of the Computer Vision–ECCV 2022: 17th European Conference, Tel Aviv, Israel, 23–27 October 2022; pp. 398–415. [Google Scholar]
- Ding, Y.; Peng, K.; Yu, M.; Lu, L.; Zhao, K. Fringe order correction for the absolute phase recovered by two selected spatial frequency fringe projections in fringe projection profilometry. Rev. Sci. Instrum. 2017, 88, 083104. [Google Scholar] [CrossRef]
- Long, J.; Xi, J.; Zhang, J.; Zhu, M.; Cheng, W.; Li, Z.; Shi, Y. Recovery of absolute phases for the fringe patterns of three selected wavelengths with improved anti-error capability. J. Mod. Opt. 2016, 63, 1695–1705. [Google Scholar] [CrossRef] [Green Version]
- Zuo, C.; Feng, S.; Huang, L.; Tao, T.; Yin, W.; Chen, Q. Phase shifting algorithms for fringe projection profilometry: A review. Opt. Lasers Eng. 2018, 109, 23–59. [Google Scholar] [CrossRef]
- Yang, X.; Zeng, C.; Luo, J.; Lei, Y.; Tao, B.; Chen, X. Absolute Phase Retrieval Using One Coded Pattern and Geometric Constraints of Fringe Projection System. Appl. Sci. 2018, 8, 2673. [Google Scholar] [CrossRef] [Green Version]
- Wan, M.; Kong, L.; Peng, X. Single-Shot Three-Dimensional Measurement by Fringe Analysis Network. Photonics 2023, 10, 417. [Google Scholar] [CrossRef]
- Fu, G.; Cao, Y.; Wang, Y.; Wan, Y.; Wang, L.; Li, C. Dynamic Phase Measuring Profilometry Based on Tricolor Binary Fringe Encoding Combined Time-Division Multiplexing. Appl. Sci. 2019, 9, 813. [Google Scholar] [CrossRef] [Green Version]
- Mohammadi, F.; Kofman, J. Multi-Wavelength Digital-Phase-Shifting Moiré Based on Moiré Wavelength. Appl. Sci. 2019, 9, 1917. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Zhang, Q.; Li, Y.; Liu, Y. High Speed 3D Shape Measurement with Temporal Fourier Transform Profilometry. Appl. Sci. 2019, 9, 4123. [Google Scholar] [CrossRef] [Green Version]
- Liang, J.; Zhang, J.; Shao, J.; Song, B.; Yao, B.; Liang, R. Deep Convolutional Neural Network Phase Unwrapping for Fringe Projection 3D Imaging. Sensors 2020, 20, 3691. [Google Scholar] [CrossRef]
- Meng, X.; Sun, F.; Zhang, L.; Fang, C.; Wang, X. Visual Three-Dimensional Reconstruction Based on Spatiotemporal Analysis Method. Electronics 2023, 12, 535. [Google Scholar] [CrossRef]
- Tuominen, S.; Näsi, R.; Honkavaara, E.; Balazs, A.; Hakala, T.; Viljanen, N.; Pölönen, I.; Saari, H.; Ojanen, H. Assessment of Classifiers and Remote Sensing Features of Hyperspectral Imagery and Stereo-Photogrammetric Point Clouds for Recognition of Tree Species in a Forest Area of High Species Diversity. Remote Sens. 2018, 10, 714. [Google Scholar] [CrossRef] [Green Version]
- Anand, R.; Veni, S.; Aravinth, J. Robust Classification Technique for Hyperspectral Images Based on 3D-Discrete Wavelet Transform. Remote Sens. 2021, 13, 1255. [Google Scholar] [CrossRef]
- Zhang, H.; Zhu, L.; Cai, X.; Dong, L. Noise removal algorithm based on point cloud classification. In Proceedings of the International Seminar on Computer Science and Engineering Technology (SCSET), Indianapolis, IN, USA, 8–9 January 2022; pp. 93–96. [Google Scholar]
- Gao, J.; Li, F.; Zhang, C.; He, W.; He, J.; Chen, X. A method of d-type weld seam extraction based on point clouds. IEEE Access 2021, 9, 65401–65410. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, F.; Long, J. Point Cloud Filtering Algorithm Based on Image Processing. Laser Optoelectron. Prog. 2021, 6, 0610015. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region Type | Number of Regions | Area |
|---|---|---|
| All regions | 95 | 189,121 |
| Noise-free reference regions | 3 | 169,811 |
| Noise regions | 66 | 3828 |
| Undetermined regions | 26 | 15,482 |
| Reference Region Number | Euclidean Distance | Noise Region Judgment | ||
|---|---|---|---|---|
| 1 | 159.8183 | 215.2727 | 55.4544 | yes |
| 2 | 144.2411 | 75.3465 | 68.8946 | yes |
| 3 | 143.5596 | −4.5771 | 148.1367 | yes |
| 4 | 158.7262 | 92.7360 | 65.9902 | yes |
| 5 | 160.9971 | 14.6061 | 146.3910 | yes |
| 6 | 151.4172 | 208.5608 | 57.1436 | yes |
| 7 | 205.1798 | 147.1611 | 58.0187 | yes |
| 8 | 181.1901 | 118.2757 | 62.9144 | yes |
| 9 | 138.8656 | 197.0954 | 58.2298 | yes |
| 10 | 147.4264 | 80.3247 | 67.1017 | yes |
| 11 | 183.5244 | 184.7373 | 1.2129 | no |
| 12 | 167.6902 | 222.4362 | 54.7460 | yes |
| 13 | 147.9508 | 80.2411 | 67.7097 | yes |
| 14 | 150.0689 | 206.8956 | 56.8267 | yes |
| 15 | 156.9197 | 89.3048 | 67.6149 | yes |
| 16 | 184.3475 | 49.5676 | 134.7799 | yes |
| 17 | 161.3780 | 96.4765 | 64.9015 | yes |
| 18 | 181.5619 | 234.0803 | 52.5184 | yes |
| 19 | 152.5448 | 208.5010 | 55.9562 | yes |
| 20 | 172.0235 | 225.6556 | 53.6321 | yes |
| 21 | 151.5831 | 207.7492 | 56.1661 | yes |
| 22 | 153.0938 | 6.4802 | 146.6136 | yes |
| 23 | 155.6365 | 88.3370 | 67.2995 | yes |
| 24 | 212.8726 | 156.0542 | 56.8184 | yes |
| 25 | 153.3561 | 209.5078 | 56.1517 | yes |
| 26 | 142.6327 | 94.4186 | 48.2141 | yes |
| Denoising Calculation Parameters | Ours | Radius Filtering Algorithm | Voxel Filtering Algorithm | The Algorithm Proposed in [37] |
|---|---|---|---|---|
| Number of initial point clouds (pixel) | 169,854 | 187,940 | 90,878 | 167,795 |
| point cloud denoising time (s) | 0.954 | 0.755 | 0.081 | 0.909 |
| (pixel) | 169,811 | 167,857 | 12,702 | 167,736 |
| (pixel) | 43 | 20,083 | 78,176 | 60 |
| (%) | 99.974 | 89.314 | 13.977 | 99.964 |
| Region Type | Number of Regions | Area |
|---|---|---|
| All regions | 22 | 120,613 |
| Noise-free reference regions | 1 | 112,871 |
| Noise regions | 9 | 1423 |
| Undetermined regions | 12 | 6319 |
| Reference Region Number | Euclidean Distance | Noise Region Judgment | ||
|---|---|---|---|---|
| 1 | 93.7989 | −4.9949 | 98.7938 | yes |
| 2 | 63.8626 | 176.2533 | 112.3907 | yes |
| 3 | 5.1033 | 106.9922 | 101.8889 | yes |
| 4 | 5.9464 | 88.0945 | 82.1481 | yes |
| 5 | −11.7774 | 85.5615 | 97.3389 | yes |
| 6 | −12.0302 | 72.3592 | 84.3894 | yes |
| 7 | 82.3165 | 203.8977 | 121.5812 | yes |
| 8 | 126.7995 | 35.2944 | 91.5051 | yes |
| 9 | 200.5824 | 356.9985 | 156.4161 | yes |
| 10 | 79.3232 | 74.3904 | 4.9328 | no |
| 11 | 178.7573 | 329.0114 | 150.2541 | yes |
| 12 | −0.4411 | 81.4749 | 81.9160 | yes |
| Denoising Calculation Parameters | Ours | Radius Filtering Algorithm | Voxel Filtering Algorithm | The Algorithm Proposed in [37] |
|---|---|---|---|---|
| Number of initial point clouds (pixel) | 112,934 | 124,960 | 60,432 | 111,565 |
| point cloud denoising time (s) | 0.875 | 0.574 | 0.058 | 0.862 |
| (pixel) | 112,871 | 119,174 | 10,309 | 111,495 |
| (pixel) | 63 | 5786 | 50,123 | 70 |
| (%) | 99.944 | 95.370 | 17.059 | 99.937 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Long, J.; Du, Z.; Ding, Y.; Peng, Y.; Xi, J. Three-Dimensional Point Cloud-Filtering Method Based on Image Segmentation and Absolute Phase Recovery. Electronics 2023, 12, 2749. https://doi.org/10.3390/electronics12122749
Zhang J, Long J, Du Z, Ding Y, Peng Y, Xi J. Three-Dimensional Point Cloud-Filtering Method Based on Image Segmentation and Absolute Phase Recovery. Electronics. 2023; 12(12):2749. https://doi.org/10.3390/electronics12122749
Chicago/Turabian StyleZhang, Jianmin, Jiale Long, Zihao Du, Yi Ding, Yuyang Peng, and Jiangtao Xi. 2023. "Three-Dimensional Point Cloud-Filtering Method Based on Image Segmentation and Absolute Phase Recovery" Electronics 12, no. 12: 2749. https://doi.org/10.3390/electronics12122749
APA StyleZhang, J., Long, J., Du, Z., Ding, Y., Peng, Y., & Xi, J. (2023). Three-Dimensional Point Cloud-Filtering Method Based on Image Segmentation and Absolute Phase Recovery. Electronics, 12(12), 2749. https://doi.org/10.3390/electronics12122749