
Cooperative Multitask Planning Strategies for Integrated RF Systems Aboard UAVs



Abstract
:1. Introduction
- (a)
- Four novel task-planning strategies are designed for different planning purposes based on the constraint conditions and evaluation indicators.
- (b)
- The results for different task planning strategies are presented by simulation.
- (c)
- The effectiveness of these strategies, as well as their advantages, disadvantages, and scenarios for which they are most suitable, are analyzed by comparison and analysis.
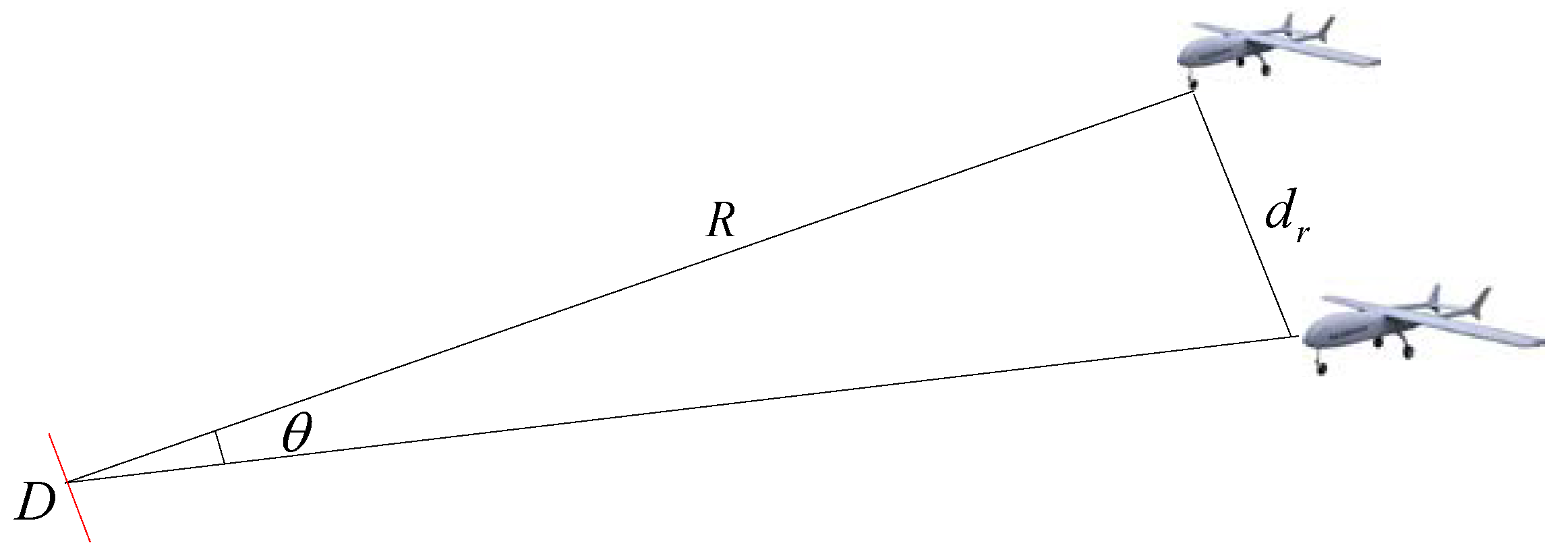
2. Physical Model for UAV Cooperation
3. Essential Compositions for UAVs Cooperation Task Planning
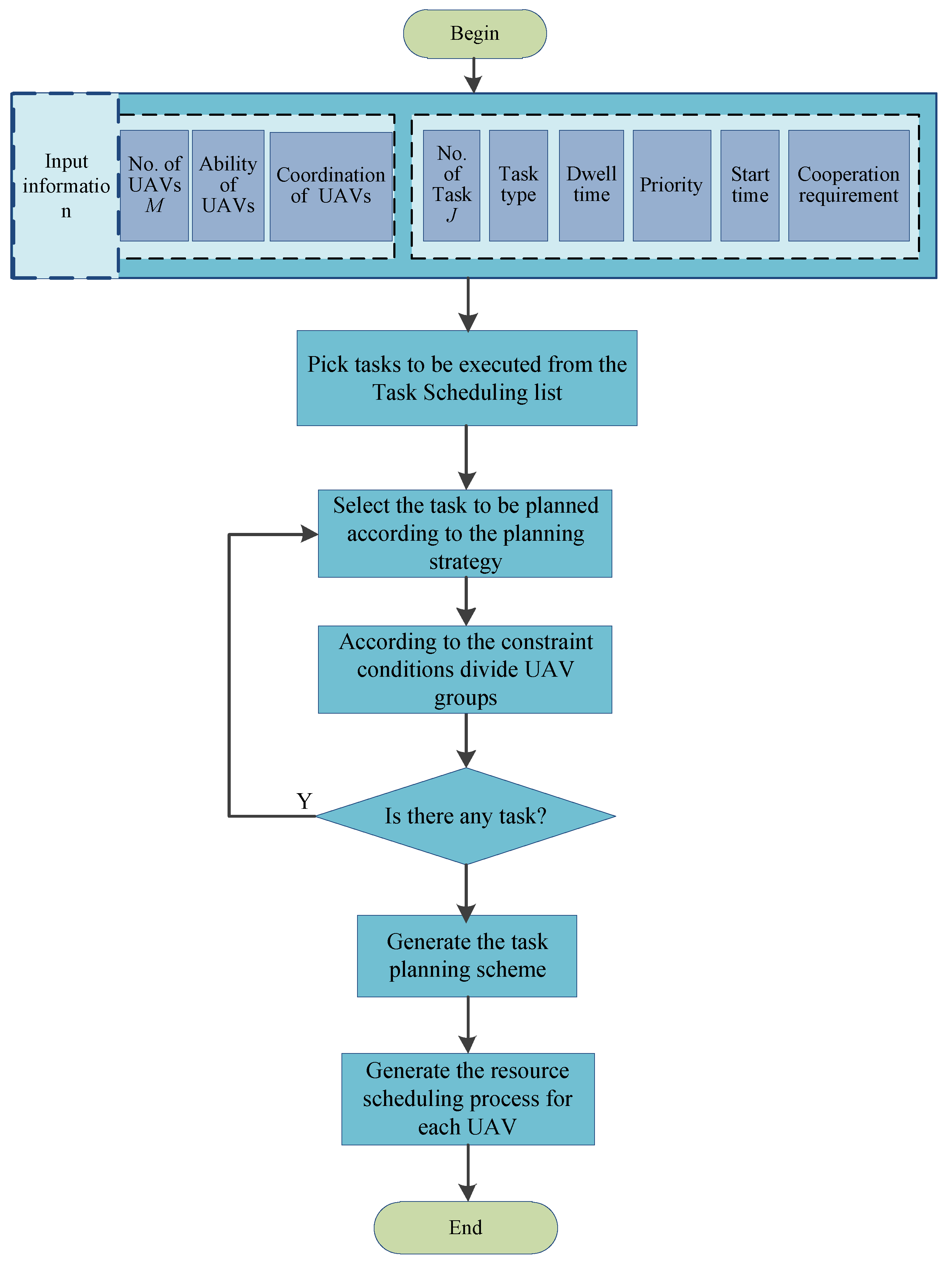
3.1. Input Information
3.2. Constraint Conditions
- (a)
- Function constraint
- (b)
- Position constraint
- (c)
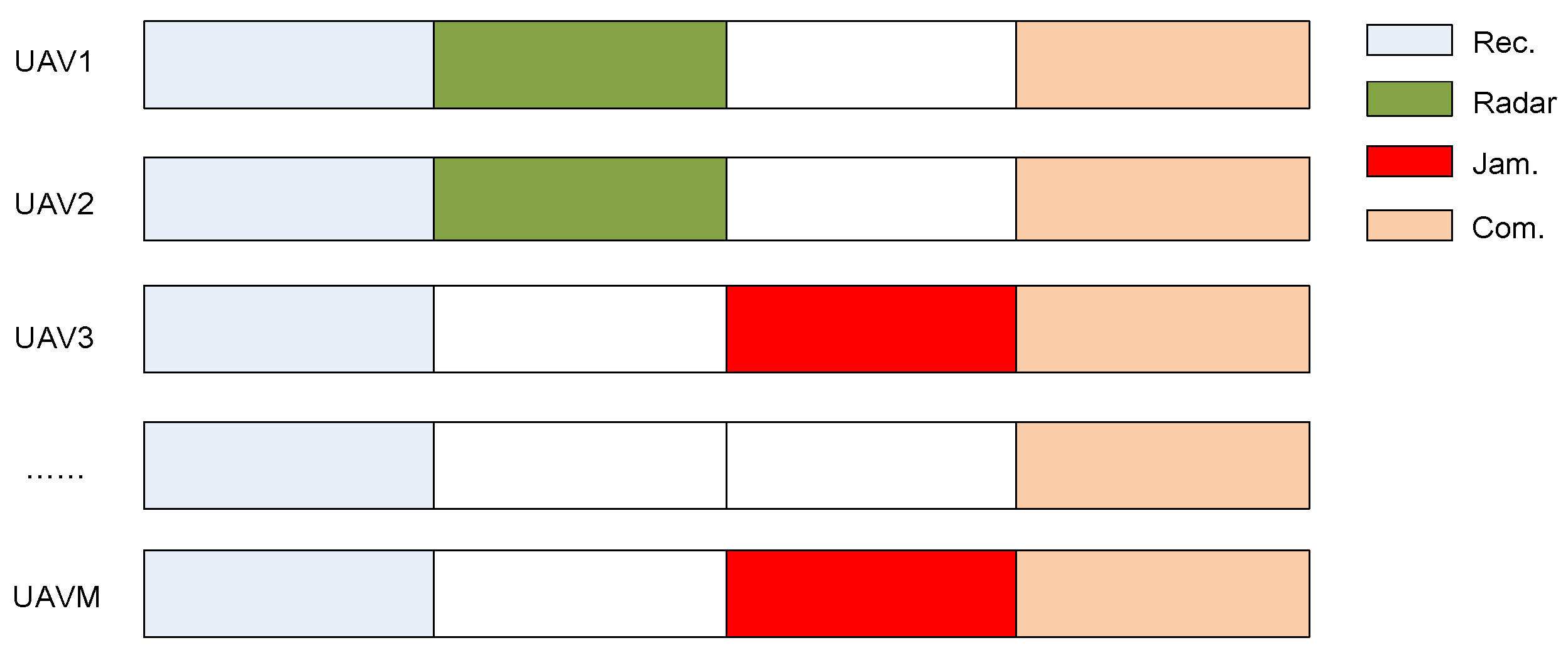
- Integrated RF resource constraint
- (d)
- Time resource constraints
3.3. Evaluation Indicators
4. Task Planning Strategies
4.1. Strategy I: Highest Priority of the Task and Shortest Distance between UAVs and the Target
4.2. Strategy II: Highest Priority of the Task and Best Task Execution Equality Rate of UAVs
4.3. Strategy III: Earliest Expected Start Time of the Task and Shortest Distance between UAVs and the Target
4.4. Strategy IV: Earliest Expected Start Time of the Task and Best Task Execution Equality Rate of UAVs
5. Task Planning Flow
6. Simulation Results and Discussion
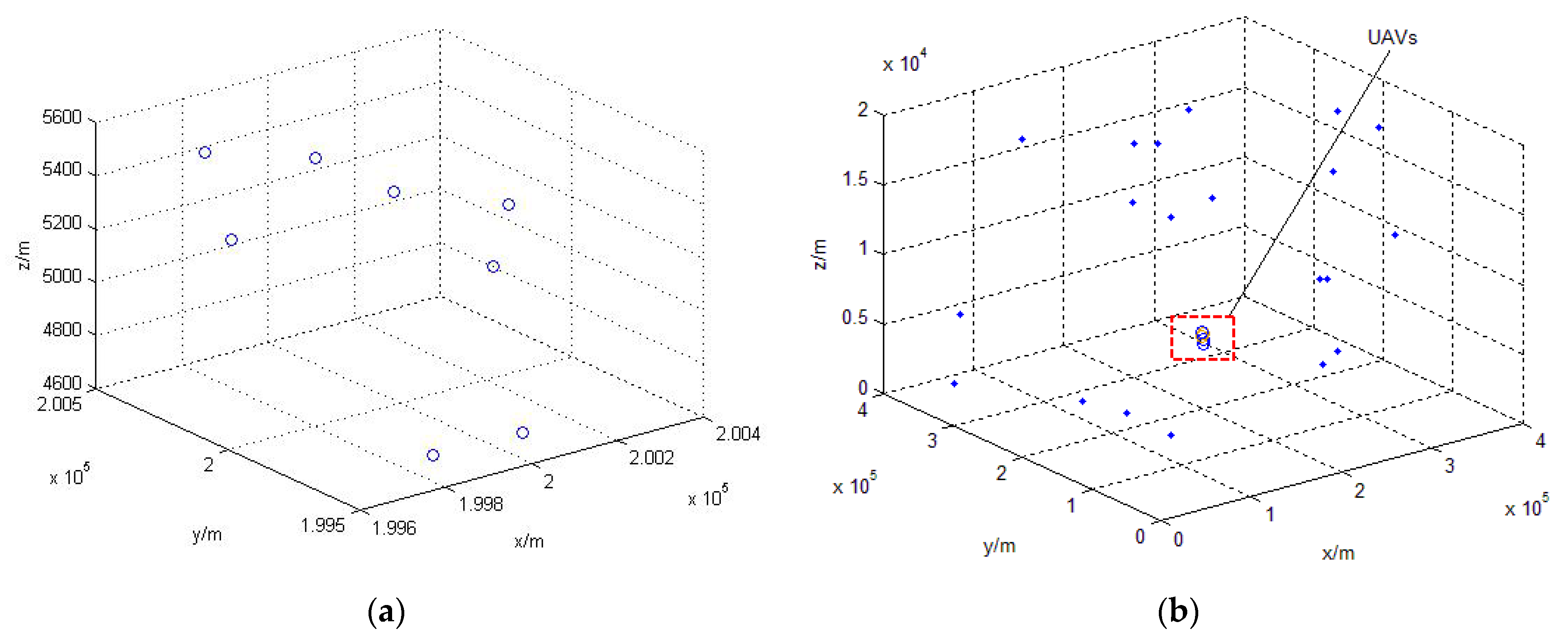
6.1. Simulation Parameters
6.2. Simulation Results
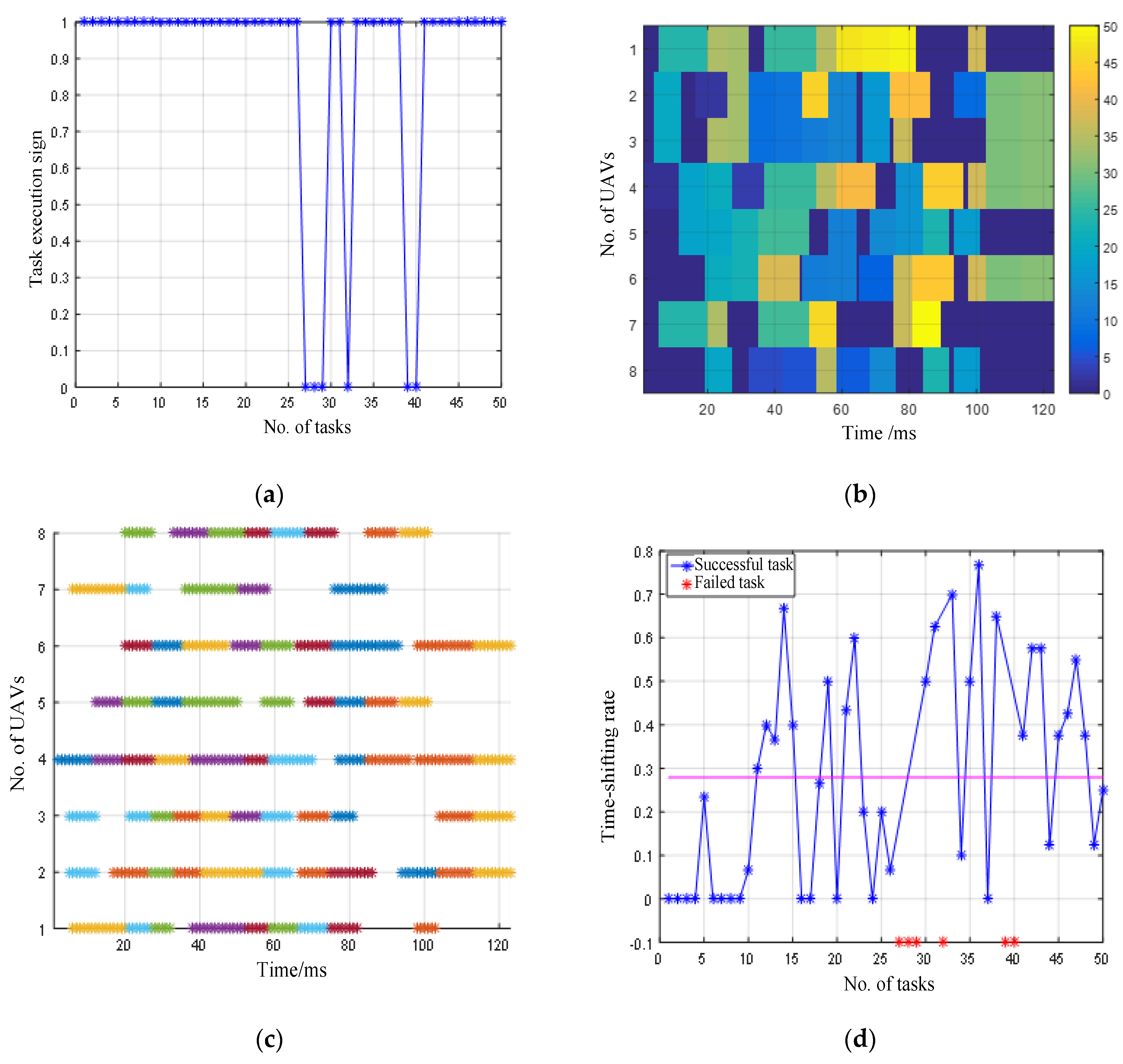
6.2.1. Results for Strategy I
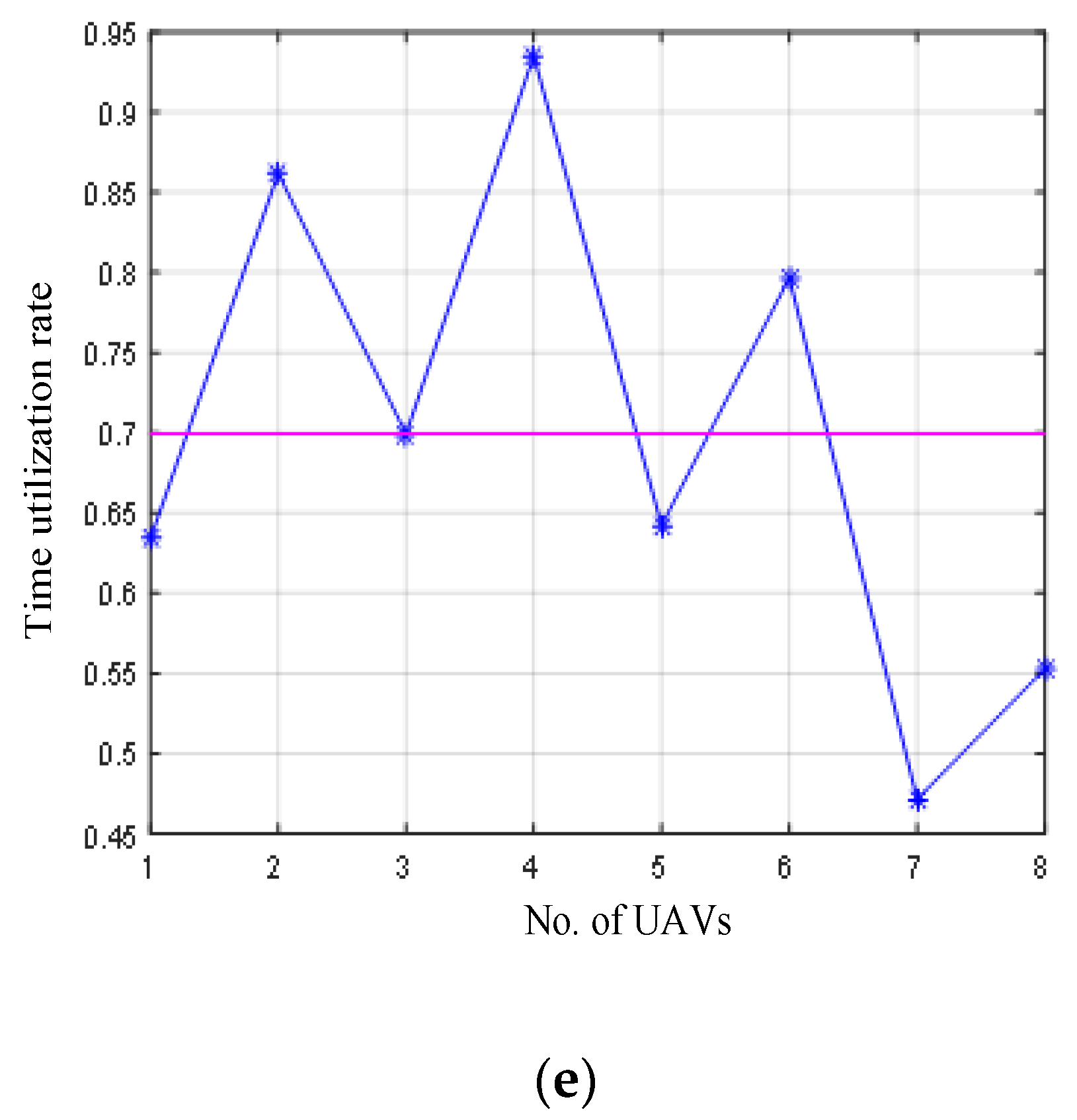
6.2.2. Results for Strategy II
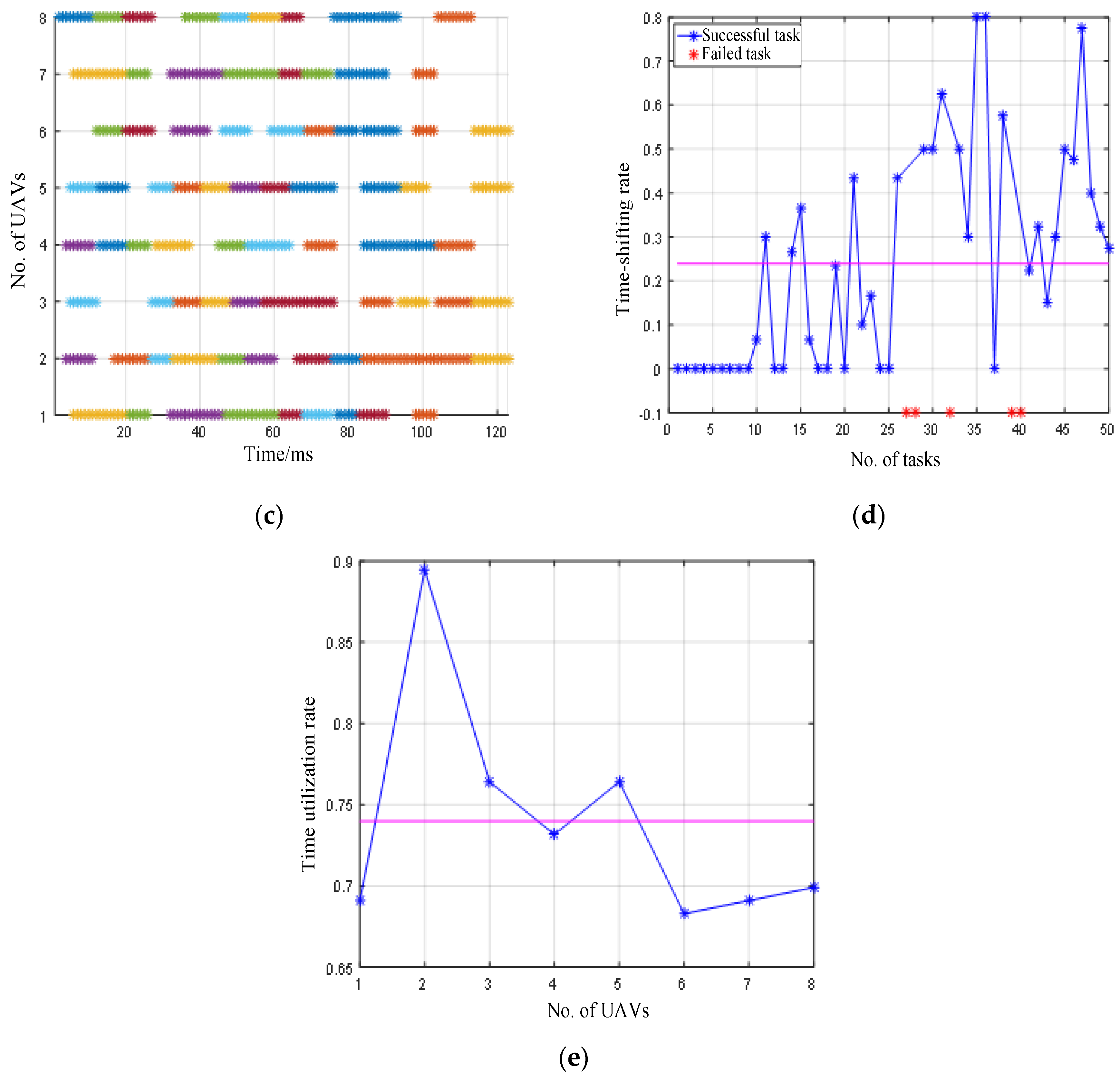
6.2.3. Results for Strategy III
6.2.4. Results for Strategy IV
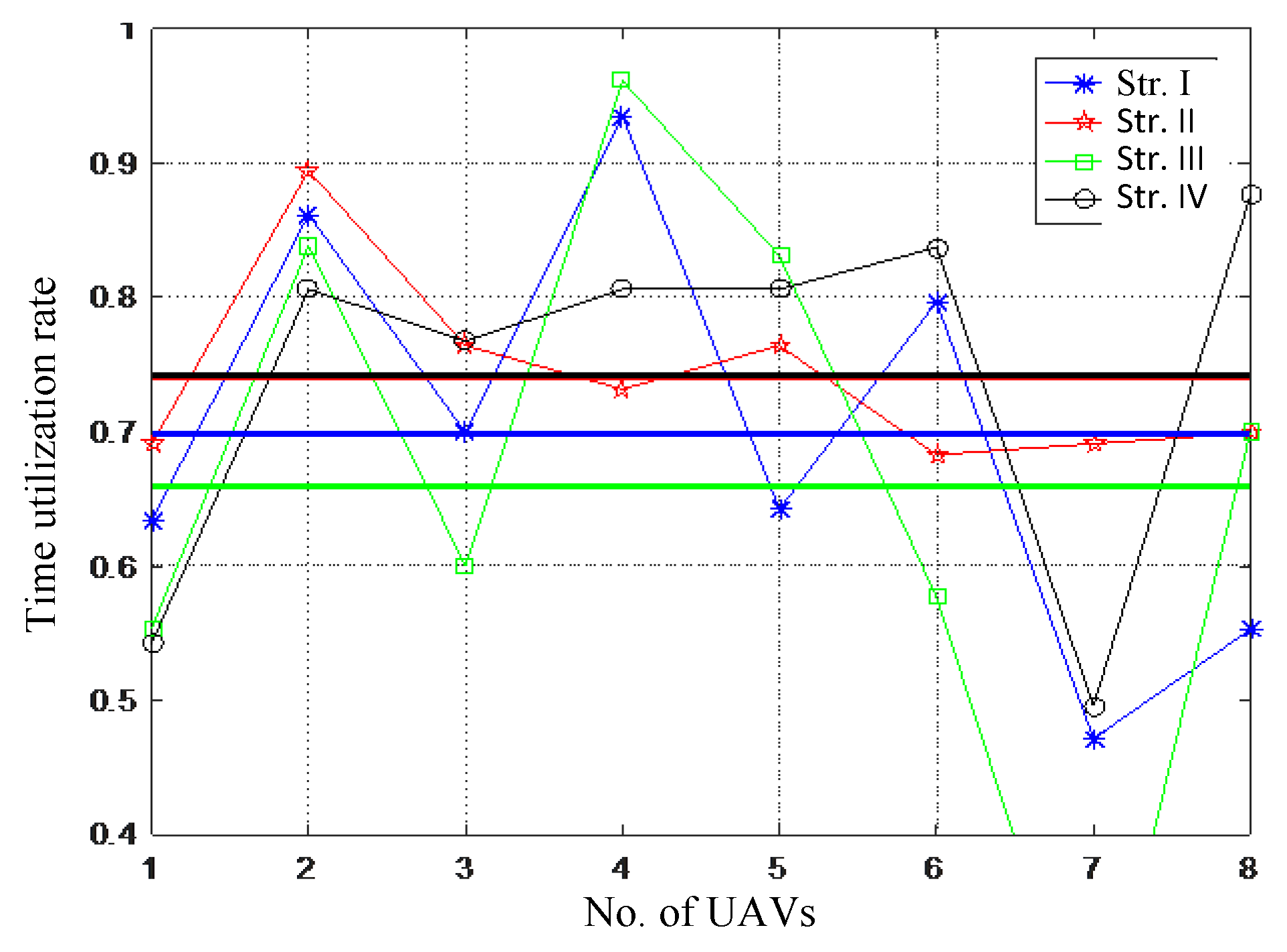
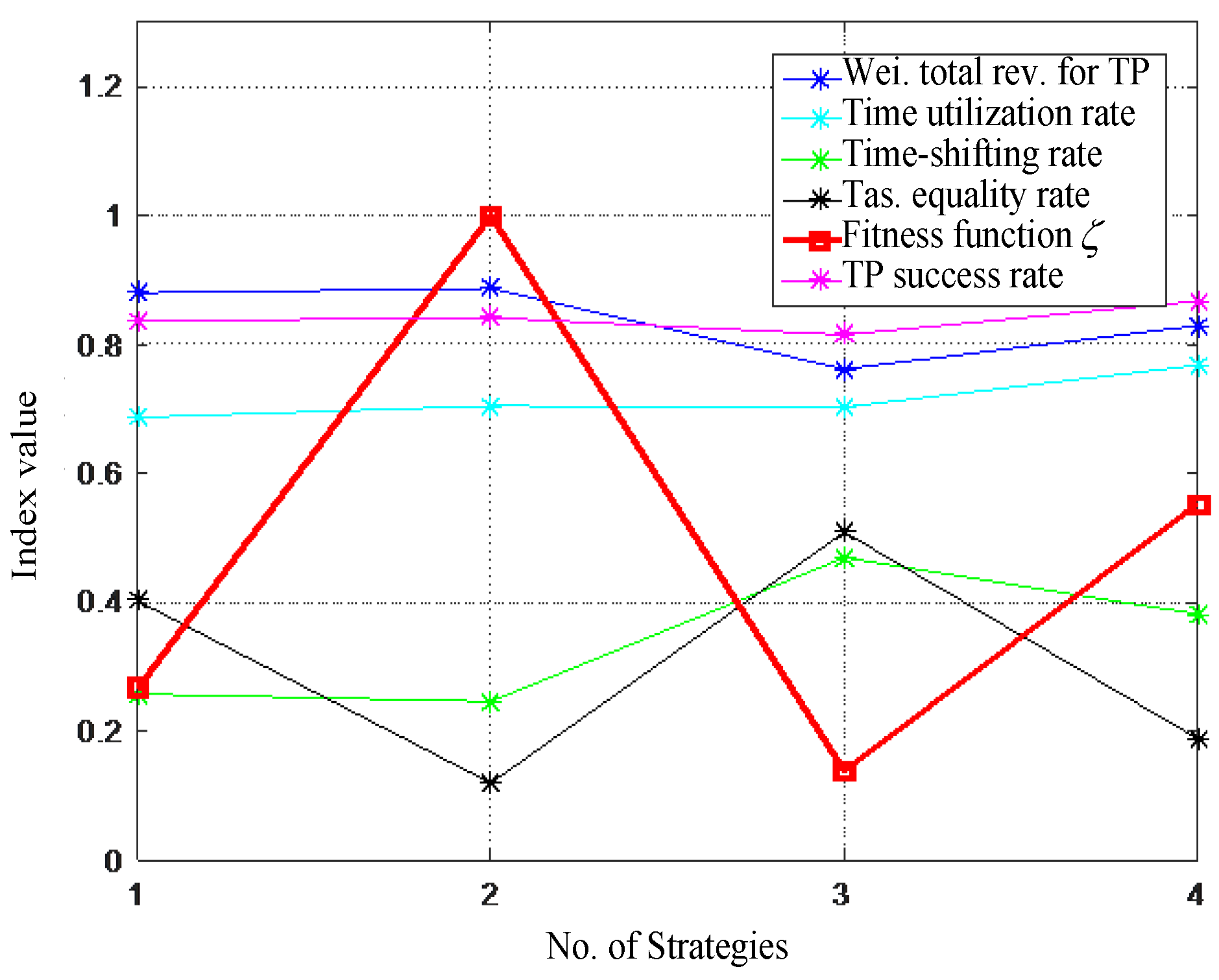
6.3. Comparison and Analysis
- (1)
- A strategy based on the task priority is better than one based on expected start time. Strategies based on priority have higher task planning revenue and lower time-shifting rate, which can ensure that important tasks could be executed in a prioritized and timely manner.
- (2)
- A strategy based on the task execution equality rate is superior to a strategy based on the shortest distance between UAVs and the target. In the task planning process, the task execution equality rate is relatively important and should be considered. Doing so can improve the task planning success rate by avoiding failure of task planning due to excessive task allocation to certain UAVs. The better the task execution equality rate is, the higher the task-planning success rate, and the higher the weighted total revenue of task planning.
- (3)
- If the sum of all dwell times of all tasks is far less than the scheduling interval of UAVs, both strategies based on expected start time and task priority could be selected, and both could ensure a certain task planning success rate. However, a strategy based on task priority is more suitable in scenarios with more tasks to be planned, which could obtain higher task planning revenue and lower time-shifting rate.
- (4)
- If the number of tasks to be executed is large and dense, the number of failed tasks would be increased. In this scenario, a strategy based on task priority and task execution equality should be selected first. Then, if the timeliness requirements of tasks are low, the time window of tasks should be increased appropriately. The larger the time window of the task is, the greater the probability of successful planning. In addition, increasing the number of UAVs or increasing the number of UAVs with certain functions can also increase the probability of successful planning for this type of task.
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Huizing, A.G.; Otten, M.P.G.; Van Rossum, W.L.; Van Dijk, R.; Maas, A.P.M.; Van der Houwen, E.H.; Bolt, R.J. Compact scalable multifunction RF payload for UAVs with FMCW radar and ESM functionality. In Proceedings of the International Radar Conference-Surveillance for a Safer World, Bordeaux, France, 12–16 October 2009. [Google Scholar]
- Kemkemian, S.; Nouvel-Fiani, M. Toward Common Radar & EW Multifunction Active Arrays. In Proceedings of the 2010 IEEE International Symposium on Phased Array Systems and Technology, Waltham, MA, USA, 12–15 October 2010. [Google Scholar]
- Chabod, L.; Galaup, P. Shared resources for airborne multifunction sensor systems. In Proceedings of the IET International Conference on Radar Systems (Radar 2012), Glasgow, UK, 22–25 October 2012. [Google Scholar]
- Baptiste, P.; Sadykov, R. Time Indexed Formulations for Scheduling Chains on a Single Machine: An Application to Airborne Radars. Eur. J. Oper. Res. 2010, 203, 476–483. [Google Scholar] [CrossRef] [Green Version]
- Barbato, A.; Giustiniani, P. An improved scheduling algorithm for a naval phased array radar. In Proceedings of the 92 International Conference on Radar, Brighton, UK, 12–13 October 1992. [Google Scholar]
- Lee, C.G.; Kang, P.S.; Shih, C.S.; Sha, L. Schedulability Envelope for Real-Time Radar Dwell Scheduling. IEEE Trans. Comput. 2006, 55, 1599–1613. [Google Scholar]
- Chavali, P.; Nehorai, A. Scheduling and power allocation in a cognitive radar network for multiple-target tracking. IEEE Trans. Signal Process. 2011, 60, 715–729. [Google Scholar] [CrossRef]
- Mir, H.S. Source Localization Using Airborne Sensor Arrays in the Presence of Manifold Perturbations; University of Washington: Washington, DC, USA, 2005. [Google Scholar]
- Zhang, Y.Z.; Li, J.W.; Hu, B.; Zhang, J.D. An improved PSO algorithm for solving multi-UAV cooperative reconnaissance task decision-making problem. In Proceedings of the IEEE International Conference on Aircraft Utility Systems, Beijing, China, 10–12 October 2016. [Google Scholar]
- Zhang, Z.; Tian, Y. A novel resource scheduling method of netted radars based on Markov decision process during target tracking in clutter. EURASIP J. Adv. Signal Process. 2016, 2016, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Su, Y.; Cheng, T.; He, Z. Joint Waveform Selection and Time-Space Resource Management in Netted Colocated MIMO Radar System for Multi-target Tracking. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–6. [Google Scholar]
- Li, X.; Cheng, T.; Su, Y.; Peng, H. Joint time-space resource allocation and waveform selection for the collocated MIMO radar in multiple targets tracking. Signal Process. 2020, 176, 107650. [Google Scholar] [CrossRef]
- Li, K.; Wang, R.; Zhang, T.; Ishibuchi, H. Evolutionary many-objective optimization: A comparative study of the state-of-the-art. IEEE Access 2018, 6, 26194–26214. [Google Scholar] [CrossRef]
- Li, F.; Xu, Z.; Li, H. A multi-agent based cooperative approach to decentralized multi-project scheduling and resource allocation. Comput. Ind. Eng. 2020, 151, 106961. [Google Scholar] [CrossRef]
- Yi, W.; Yuan, Y.; Hoseinnezhad, R.; Kong, L. Resource scheduling for distributed multi-target tracking in netted colocated MIMO radar systems. IEEE Trans. Signal Process. 2020, 68, 1602–1617. [Google Scholar] [CrossRef]
- Cao, Y.; Wang, R.; Chen, M.; Barnawi, A. AI agent in software-defined network: Agent-based network service prediction and wireless resource scheduling optimization. IEEE Internet Things J. 2019, 7, 5816–5826. [Google Scholar] [CrossRef]
- Xue, H.; Zhang, T.; Wang, R.; Liu, X.H. Multi-task Planning for Cooperative UAVs with Integrated Radio Frequency system. In Proceedings of the 2021 CIE International Conference on Radar (Radar), Haikou, China, 15–19 December 2021; pp. 1225–1230. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Related Works | Main Contributions | Application |
|---|---|---|
| Baptiste [4] | Resource scheduling algorithm for a single platform | Single platform |
| Barbato A [5] | Resource scheduling algorithm for multitask and multifunction radar | Single platform |
| Lee C G [6] | Real-time resource scheduling algorithm for radar system | Single platform |
| Chavali P [7] | Task planning algorithm for multitarget tracking | Multi-platforms and multitargets |
| Mir H S [8] | Localization algorithm for multi-sensors | multi-sensors for cooperation |
| Zhang Y Z [9] | Task decision-making algorithm for cooperative reconnaissance | Multi-sensors for cooperation |
| Zhang Z [10] | Resource scheduling method for netted radar | Multi-platfoms and multi-sensors |
| UAV | Rec. Capability | Radar Capability | Jam. Capability | Coordinates/m | ||
|---|---|---|---|---|---|---|
| x | y | z | ||||
| UAV #1 | 1 | 0 | 0 | 200,420 | 200,356 | 5434 |
| UAV #2 | 1 | 1 | 1 | 200,142 | 199,674 | 4939 |
| UAV #3 | 1 | 1 | 0 | 199,830 | 199,714 | 4659 |
| UAV #4 | 1 | 1 | 1 | 200,220 | 200,253 | 5300 |
| UAV #5 | 1 | 1 | 0 | 199,716 | 200,351 | 4730 |
| UAV #6 | 1 | 1 | 1 | 199,818 | 199,822 | 4530 |
| UAV #7 | 1 | 0 | 0 | 199,664 | 199,940 | 5240 |
| UAV #8 | 1 | 1 | 1 | 199,692 | 200,297 | 4827 |
| S/N | Task Type | Nodes | Dwell Time /ms | Time Window | Coordinates/m | Start Time /ms | Deadline /ms | ||
|---|---|---|---|---|---|---|---|---|---|
| x | y | x | |||||||
| 1 | 1 | 1 | 8 | 40 | 390,914 | 140,398 | 8393 | 70 | 110 |
| 2 | 2 | 1 | 12 | 40 | 321,448 | 40,453 | 508 | 10 | 50 |
| 3 | 1 | 1 | 8 | 40 | 28,170 | 142,416 | 4714 | 72 | 112 |
| 4 | 7 | 2 | 8 | 30 | 265,990 | 265,183 | 14,982 | 65 | 95 |
| 5 | 4 | 4 | 10 | 40 | 317,821 | 59,505 | 17,900 | 89 | 129 |
| 6 | 1 | 1 | 8 | 40 | 298,014 | 292,073 | 14,615 | 37 | 77 |
| 7 | 8 | 1 | 10 | 30 | 200,229 | 198,593 | 5750 | 17 | 47 |
| 8 | 3 | 3 | 6 | 30 | 304,018 | 187,893 | 15,860 | 18 | 48 |
| 9 | 2 | 1 | 12 | 40 | 226,019 | 228,558 | 4557 | 44 | 84 |
| 10 | 5 | 2 | 15 | 30 | 309,574 | 256,529 | 10,933 | 34 | 64 |
| 41 | 2 | 1 | 12 | 40 | 106,449 | 217,285 | 6306 | 59 | 99 |
| 42 | 8 | 1 | 10 | 30 | 106,386 | 210,546 | 5161 | 33 | 63 |
| 43 | 8 | 1 | 10 | 30 | 366,505 | 358,620 | 962 | 28 | 58 |
| 44 | 8 | 1 | 10 | 30 | 193,621 | 294,000 | 5901 | 36 | 66 |
| 45 | 4 | 4 | 10 | 40 | 399,429 | 238,880 | 2277 | 64 | 104 |
| 46 | 7 | 2 | 8 | 30 | 11,064 | 342,277 | 14,901 | 45 | 75 |
| 47 | 7 | 2 | 8 | 30 | 355,477 | 40,526 | 5273 | 67 | 97 |
| 48 | 7 | 2 | 8 | 30 | 188,358 | 222,482 | 16,826 | 49 | 79 |
| 49 | 4 | 4 | 10 | 40 | 62,130 | 121,062 | 15,196 | 39 | 79 |
| 50 | 3 | 3 | 6 | 30 | 260,324 | 374,762 | 5106 | 38 | 68 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, H.; Zhang, T.; Wang, R.; Liu, X. Cooperative Multitask Planning Strategies for Integrated RF Systems Aboard UAVs. Electronics 2023, 12, 2565. https://doi.org/10.3390/electronics12122565
Xue H, Zhang T, Wang R, Liu X. Cooperative Multitask Planning Strategies for Integrated RF Systems Aboard UAVs. Electronics. 2023; 12(12):2565. https://doi.org/10.3390/electronics12122565
Chicago/Turabian StyleXue, Hui, Tao Zhang, Rui Wang, and Xinghua Liu. 2023. "Cooperative Multitask Planning Strategies for Integrated RF Systems Aboard UAVs" Electronics 12, no. 12: 2565. https://doi.org/10.3390/electronics12122565
APA StyleXue, H., Zhang, T., Wang, R., & Liu, X. (2023). Cooperative Multitask Planning Strategies for Integrated RF Systems Aboard UAVs. Electronics, 12(12), 2565. https://doi.org/10.3390/electronics12122565