1. Introduction
Facial Expression Recognition (FER), or emotion recognition, is most often viewed as a classification task where the goal is to classify the expression of a person’s face into one of N predefined emotion classes. The emotion recognition problem has proved to be hard, even for humans. People can be easily mistaken when predicting another human being’s emotional state just by using visual traits. Hence, humans tend to judge emotions of others by using not just facial expressions, but also body language, audio signals such as voice, etc. One of the situations where it is important to recognize human emotions is during lectures in the classroom. By observing the faces of students, teachers can recognize if the students are listening carefully, if they seem to understand the course material, if the lecture tempo is too slow or too fast, etc. With the development of machine learning algorithms and appropriate hardware, computer-aided FER became possible. Since FER is difficult for humans, it is even more challenging to automate this task and predict emotions from images in real time.
In this paper, we applied real-time FER to the images of student faces in the classroom environment in order to help teachers assess the quality of used teaching methods. The purpose of this research was primarily to evaluate the quality of active teaching methods with FER as a tool for obtaining emotion predictions. Similar research to ours predominantly analyzed how student emotions could be utilized to improve passive teaching methods where teachers hold a lecture while students listen and write down what the teacher is presenting [
1]. Furthermore, passive teaching with FER is most often researched for online lectures, since the video data of students during the online lecture are easily obtainable. Conversely, we went in the active teaching direction and applied our FER models to video data of robotics workshop participants in a classroom environment and statistically analyzed collected data. This active case is more challenging since it aligns with the FER
in-the-wild setting where the emotion recognition task is aggravated by occlusions and head pose variations.
Our robotics workshop included solving eight simple visual programming tasks in order to run them on a Lego Mindstorms EV3 (
https://education.lego.com/en-us/product-resources/mindstorms-ev3/teacher-resources/classroom-materials (accessed on 28 February 2022)) robot [
2]. It included both male and female participants who engaged in different activities that can be divided into programming, using the robot, asking for help, and other actions. During the mentioned activities, participants showed different facial expressions such as
anger,
sadness,
happiness,
surprise,
neutral, and
other which represents
fear,
disgust, and all other emotions that are not likely to emerge during the active teaching setting. The named emotions were not easily obtainable and needed to be automatically recognized from the video data of the workshop. Therefore, a substantial effort in this study was directed towards development of appropriate FER models. For the purpose of this work, the experiment was named the FER classroom experiment. In order to provide teachers with feedback for active teaching methods, we formulated the following research questions:
Which emotions generally occur most often in the active classroom environment?
Is there any difference between genders regarding the shown emotions that occur in the active classroom environment?
Which emotions are more likely to occur in the context of each activity?
Which activity is the most likely to evoke a certain emotion?
Is there any dependency between emotions, activities, gender, and tasks?
To answer the stated research questions, we used statistical analysis methods, specifically Maximum Likelihood Estimation (MLE) and a test of independence.
We see the following main contributions of our paper:
Extensive research of existing FER solutions in the machine learning area and similar classroom experiments where emotions of participants were tracked and recorded in time.
Development of four different FER models and detailed statistical comparison of their success on standard data sets.
Statistical data analysis of predicted emotions in the FER classroom experiment with insights into connections and correlations between emotions, tasks, gender, and activities which signal how active teaching methods could be improved.
The remainder of this paper is organized as follows. In order to develop the model which best suits our case, we did extensive research on existing FER solutions and similar classroom experiments which we deliver in
Section 2.
Section 3 presents the setting of our classroom experiment and describes the machine learning models and data sets utilized for their training and evaluation.
Section 4 presents our results and inferences from statistical data analysis of predicted emotions and activities where we answer our research questions.
Section 5 argues potential validity threats and future work directions while
Section 6 concludes the paper.
3. Methodology
The FER classroom experiment consisted of 40 participants who were asked to solve 8 visual programming tasks using a Lego Mindstorms EV3 educational robot. Participants were adults, mostly master’s and PhD students. Some of them had experience with programming and none had experience with the mentioned robot. The programming language for the used robot was visual in order to enable participants with no prior programming knowledge to independently solve the given tasks.
Table 1 gives an explanation of what the tasks were and the purpose of each task. The order of the tasks was fixed for all participants. The first task was the easiest and introduced the participants to the programming software for the robot. Each succeeding task used the knowledge from the previous tasks and gradually introduced new ideas and concepts. The participants solved the tasks on their own and called for help only in case they were stuck. In our previous research, we developed automatic assessment of programming solutions for the same tasks [
2].
The faces of participants were recorded with a tablet positioned in front of the computer. Since the tablet was slightly under the screen, the recorded faces ended up slightly tilted and, due to the position of the tablet, faces were sometimes occluded by the robot in front of them. Because of this, we can consider this setting as a FER in-the-wild case. Computer screens were recorded to keep track of mouse movement and keyboard presses. Considering that clocks in the tablet and computer were synced, we connected moments when each participant started and finished each task on the computer and in the video. We cut the videos into separate tasks to enable the analysis of the correlation between emotions and tasks. Each task could have been solved in two to five minutes. The longest time any experiment participant spent on solving any task was half an hour. Several participants did not solve most of the tasks. Hence, we discarded those videos and were left with videos of 32 participants (gender: 19 male and 13 female). Some of the remaining participants did not solve the 8th task so for that task we have only 29 videos.
During the experiment, we identified four types of activities:
Programming (P)—participant is looking at the screen, touching mouse or keyboard.
Robot (R)—participant is looking at the robot, trying out the program written for the robot, and observing the robot’s behavior after running the program.
Help (H)—participants were sometimes stuck and needed our help with the programming or robot, so this activity refers to the part where we explained and guided them.
Other (O)—everything not in the first three categories including, but not limited to, talking with other participants, looking around the classroom, walking, drinking, eating, searching through their things, etc.
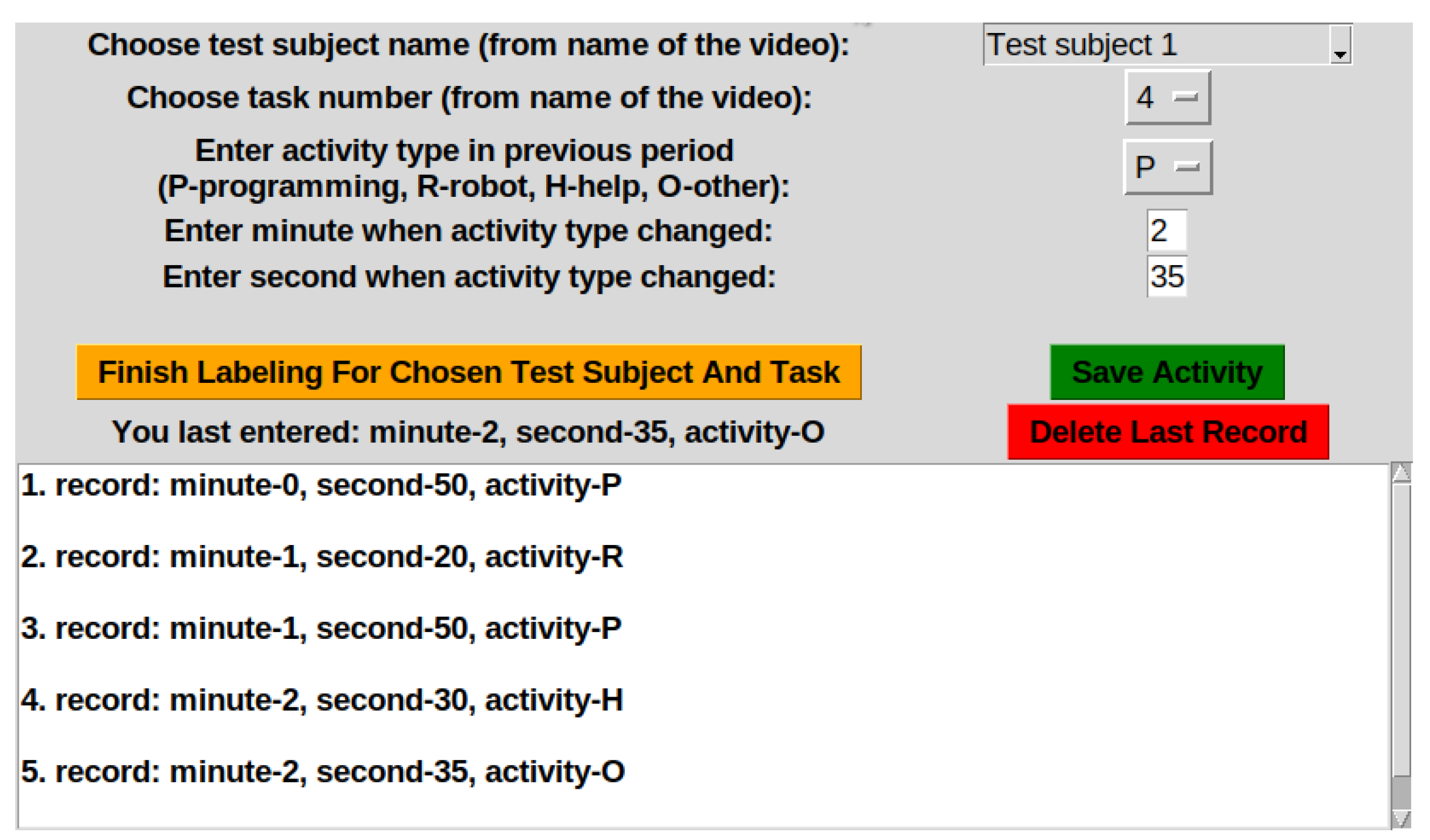
To label activities for experiment participants, a simple desktop application called
Video Labeler was developed. With it, 14 annotators labeled videos of all 32 participants (almost 23 h of the video material). They were instructed to enter labels only on activity type change. The labeling task was pretty straightforward because the activity type change moment was always clearly visible and there was a minimal chance of disagreement between annotators due to the non-existent subjectivity component. Therefore, we used one annotator per video. A screenshot of Video Labeler is shown in
Figure 1.
After obtaining the data about gender, tasks, and activity types for each participant, we needed to predict emotions on their faces. In each second of the video, the face was detected using SSD [
31]. Since we wanted to eliminate face detection of extremely tilted faces when participants were looking far away from the camera, we discarded all detected faces if the model’s confidence level of the detection was under
. It is important to mention that it was possible that sometimes there were multiple faces in front of the camera. This would happen when a participant was asking for help. In these situations, we kept only the face with the largest detected bounding box area. Finally, in order to automatically label extracted faces with emotions, machine learning models were developed and used. Since most of the data sets and models were developed specifically for either lab-controlled or
in-the-wild FER, and our use case is somewhere in between, we had to tailor both the FER models and data sets used for their training to our specific use case.
3.1. Emotion Recognition Models
To find the best models for FER in the active classroom environment where students are expected to constantly move their heads and not look directly into the camera, we investigated both traditional and deep learning algorithms in combination with categorical FER.
3.1.1. Data Set
In order to enable the predictive models to work properly in the active classroom environment, we combined both lab-controlled and
in-the-wild standard emotion recognition data sets: CK+, FER-2013, and SFEW. These data sets were used to train our FER models. Used data set statistics are presented in
Table 2.
The CK+ data set has a set of images for each test subject and each of the following emotions: anger, disgust, fear, happiness, sadness, surprise, and contempt. For a specific emotion, images were recorded gradually from a neutral emotion to the targeted emotion that the subject was asked to show. Hence, we used only the first and the last image. The first image was gathered only once for each test subject from CK+ data set in order to avoid having class imbalance due to the large number of neutral class images. The contempt class was not used. From FER-2013, we hand-picked images for each class that were correctly labeled in our opinion. In our final data set, the most common examples are images from FER-2013 data set. This data set was labeled with the following emotions: anger, disgust, fear, happiness, sadness, surprise, and neutral. Finally, we added all the images from the SFEW train set which was labeled with same categorical emotion labels as FER-2013 data set.
To adjust the data set to the expected FER in the classroom for our experiment, class other was created by merging all images labeled as fear or disgust into one class, under the assumption that students will not show emotions of fear or disgust during programming and working with the robot. Furthermore, it is important to note that we discarded images with children’s faces due to the fact that all participants in our experiment were adults.
As a result, we had 3929 images in our starting data set. Some images from the data set were already cropped in advance to show only the face (mostly for the FER-2013 data set) while others required detection and extraction of the faces manually. Additionally, the SFEW data set had images with several faces in one image showing the same emotion. Therefore, we extracted them into separate images which increased the final data set face number to 3950. For face detection, we used the Single Shot MultiBox Detector (SSD) [
31]. If the model had confidence higher than
, we assumed that the detected object was a face. Finally, images were resized to match the size of 300 × 300 pixels, converted to grayscale, and Contrast Limited Adaptive Histogram Equalization (CLAHE) was applied.
The data set splits into train, validation, and test sets were stratified to avoid the class imbalance problem. Furthermore, the splits were created with the same random state in advance to enable model comparison. We trained all the models on the same train set, tuned hyperparameters on the same validation set, and compared prediction success on the same unseen testing data.
3.1.2. Machine Learning Models
We implemented and tested traditional (e.g., Support Vector Machine (SVM)) and deep learning (e.g., CNN) methods in Python using specialized machine learning (ML) libraries scikit-learn (
https://scikit-learn.org/stable/ (accessed on 28 February 2022)) and Pytorch (
https://pytorch.org/ (accessed on 28 February 2022)). Experiments with deep learning models were performed on Google Colab (
https://colab.research.google.com/ (accessed on 28 February 2022)).
The starting approach for solving the FER problem was to use facial landmarks for crafting the features which were inserted into the traditional machine learning model. Facial landmarks were located using the C++ library dlib [
32] in combination with Python. The 68 facial landmarks form the
starting points set
.
Since humans can show the same emotion in different parts of the image due to head movement, face shape etc., we performed scaling of original facial landmarks to mitigate that effect:
where
refers to the mean of the set
P i.e., a centroid on the face. The denominator is the largest absolute value among
x and
y values from the set
P. Moreover, we created additional features using distances from each facial landmark to the centroid of all facial landmarks. The
distance features were calculated by applying L2-norm on the facial landmarks from the standardized set
and its centroid
:
where the standardized set of facial landmarks was defined as:
with
,
denoting estimated standard deviation of
x and
y points from the starting points set
P, respectively.
Finally, features from and were concatenated into the final feature vector with a total number of elements equal to 204. The final feature vector included both x and y values of the set and all distance values from the set. Furthermore, to filter out redundant features, univariate feature selection was applied. Depending on the f-value from an Analysis of Variance (ANOVA) test, 120 final features were chosen that showed statistically significant differences across the 6 emotion classes.
Numerous traditional models were tried out on extracted features: SVM, Logistic Regression (LR), K-nearest Neighbors (KNNs), Random Forest Classifier (RF), and eXtreme Gradient Boosting Classifier (XGBoost). We opted for the SVM since it generalized best on the crafted features.
The SVM model was performing sufficiently well enough in the static case, but seemed to generalize badly when the experiment participant was not looking directly at the camera due to head rotation. This could certainly be explained by the inability of dlib’s facial landmarks predictor to properly position facial landmarks on a tilted face. Thus, we turned to the development of deep models using our own and pre-trained CNNs.
First, we developed our own CNN for FER (EM-CNN), whose architecture is shown in
Table 3. Input to the EM-CNN was a resized grayscale image to match the 300 × 300 dimensions with 3 input channels. Since grayscale images have only one channel, the three channels were simulated by copying the first channel two times. We added image augmentation to the training set including random horizontal flip and random image rotation where the angle of the rotation was chosen randomly from the interval
. Lastly, images from train, validation, and test sets were standardized using a mean of
and a standard deviation of
. The mean and standard deviation values were calculated a priori on the whole data set. This network performed better than our SVM model, as is given in the next section.
However, the data set of almost 4000 images turned out to be too small to train the EM-CNN from scratch in order to obtain a significant generalization performance improvement over the SVM with handcrafted features.
Therefore, we fine-tuned two popular pre-trained CNNs: ResNet-34 [
33] and Inception-v3 [
34]. At the end of these networks, the final fully connected layer was appended to enable classification into 6 classes.
For the training phase, Inception-v3 uses two output layers. The primary output is a linear layer at the network’s end, while the second output is an auxiliary one. For the testing phase, only the primary output is used. Input image size for Inception-v3 is 299 × 299. Thus, the data set images were shrunk a little before being fed into the network’s input to match its requirements.
ResNet-34 is a deep residual convolutional neural network with 34 layers. It gave better results than ResNet-18 and ResNet-152 with 18 and 152 layers, respectively. Input image size for ResNet-34 is 224 × 224.
The following pre-processing steps were the same for Inception-v3 and ResNet-34. Both networks expect three channels at the input, so the grayscale images from the data set were duplicated onto the two remaining channels. Next, the same pre-processing pipeline was applied to the train set as for EM-CNN: random horizontal flip, random rotation, and standardization. Validation and test sets were only standardized.
3.1.3. Model Selection
We compare four models: SVM with handcrafted features, EM-CNN, fine-tuned Inception-v3, and fined-tuned ResNet-34. All models were trained, validated, and tested on the same splits of the original data set.
For our SVM model, a radial basis function kernel was used. We tuned regularization parameter C and kernel coefficient using grid search with 5-fold cross validation. Both parameters for grid search took on values from the following set: . The best hyperparameters were: , .
CNNs had different hyperparameters to optimize with respect to SVM, but the same with respect to each other. The best obtained hyperparameters for the three CNNs are presented in
Table 4. We explored Stochastic Gradient Descent (SGD) and Adam as optimizers. Adam gave better results. The optimal architecture for EM-CNN is given in
Table 3. Pre-trained CNNs were examined as fixed feature extractors and as fine-tuned models. Both Inception-v3 and ResNet-34 worked better when fine-tuned. For training our deep models, we tried learning rates of different orders of magnitude. The best performance was obtained when the learning rate was of the order of magnitude of
. In addition, we tried training with and without the learning rate scheduler. The better performance on the validation set was achieved when we used the learning rate scheduler in contrast to keeping the learning rate fixed during the training phase. For all models, the best learning rate scheduler was the multiplicative one. This scheduler multiplies the learning rate of each parameter group with the multiplicative factor in each epoch. Hyperparameters for CNNs were optimized using randomized search. Lastly, early stopping was implemented that tracked changes in accuracy on the validation set. If there was no improvement on the validation set in 50 consecutive epochs, the training phase was stopped. For each CNN, the parameters that were chosen as optimal were ones that achieved the highest score on the validation set independent of the early stopping method.
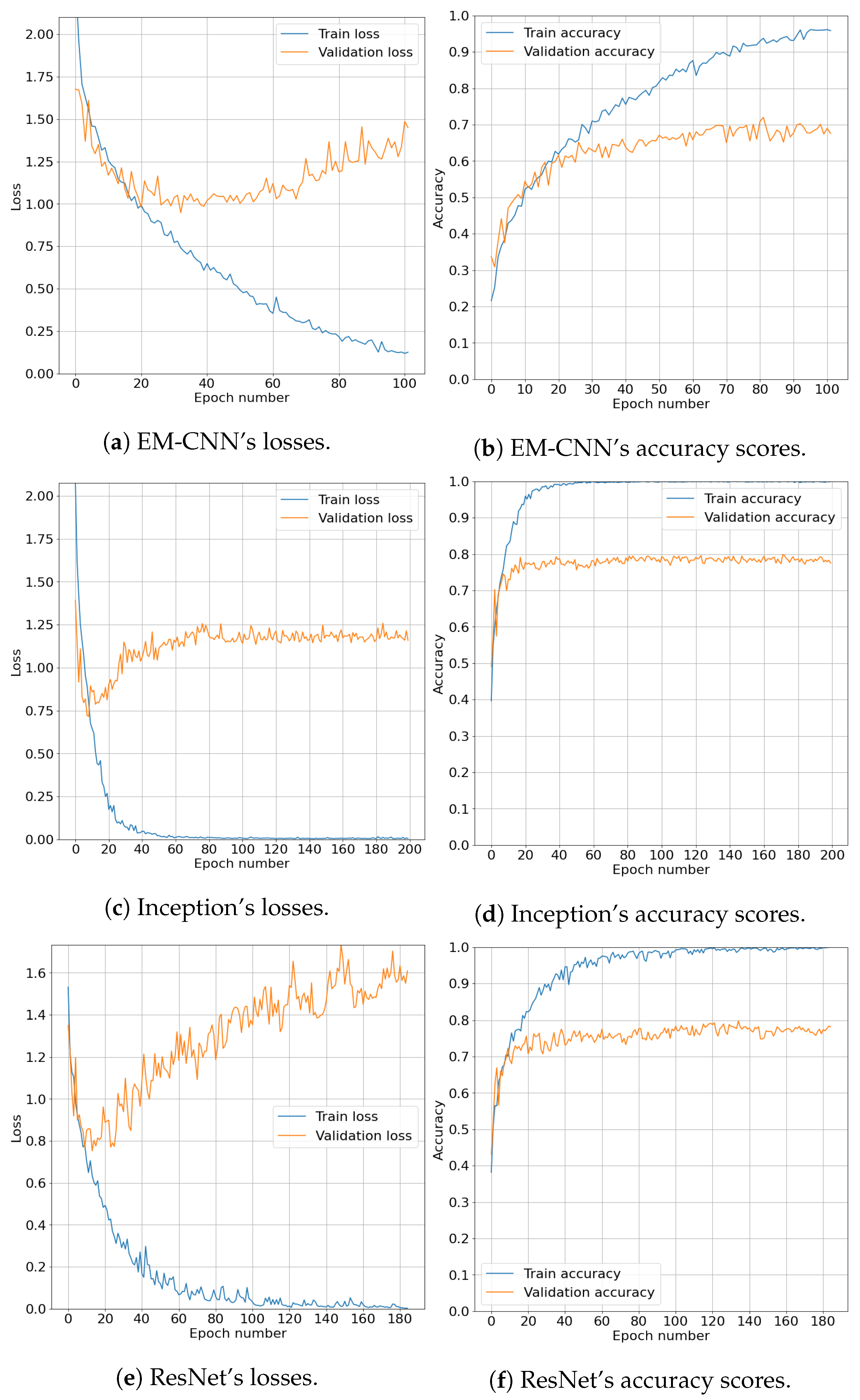
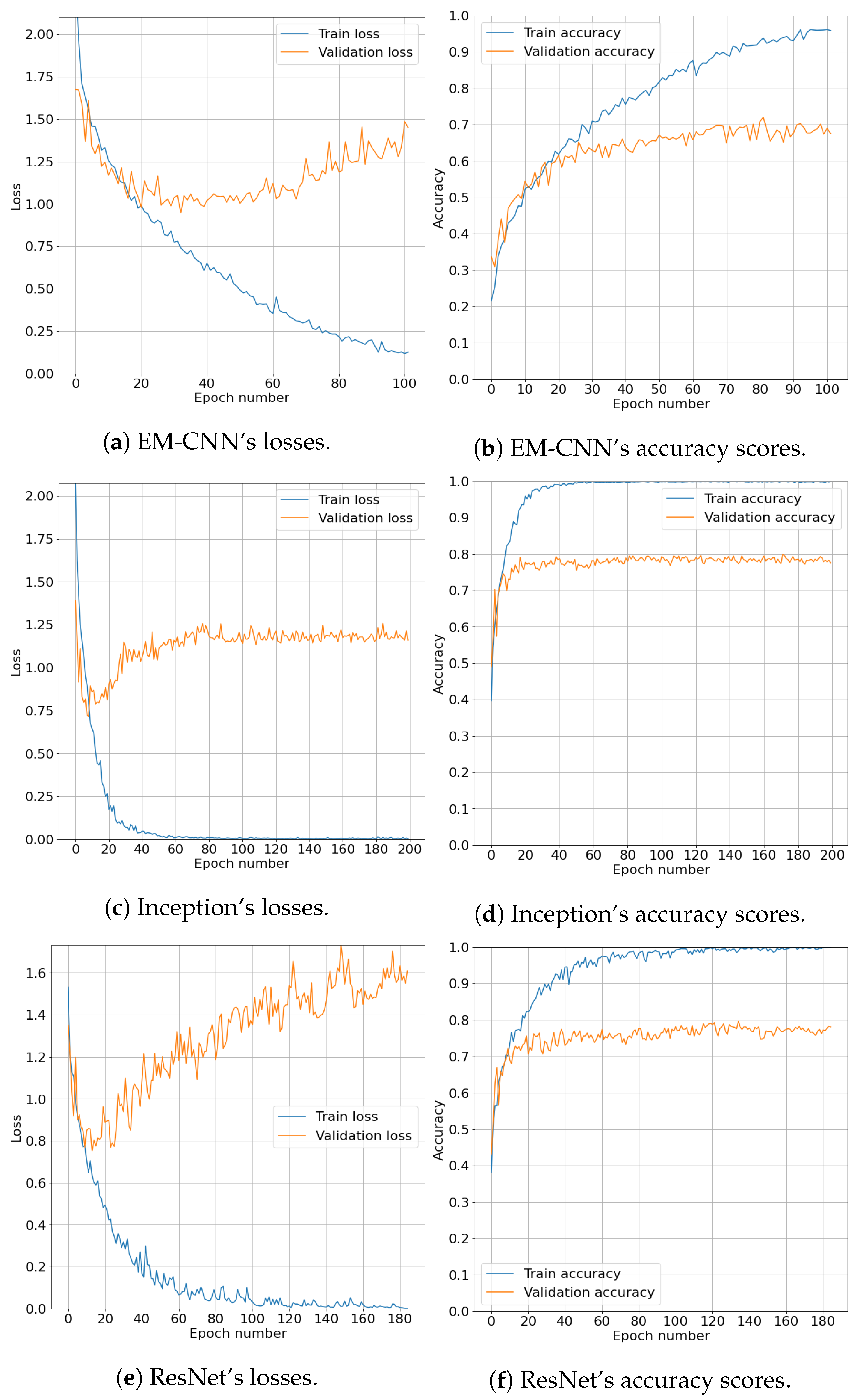
Plots of cross-entropy losses and accuracy scores over epochs are given in
Figure 2. A maximum number of epochs was not set in advance since the early stopping method was used. Hence, every CNN has a different final number of epochs on the x-axis. Generally speaking, all CNNs followed similar trends. Loss on the train set dropped almost monotonically, while loss on the validation set dropped until some point where it started to grow again. Accuracy scores on the train set gravitated towards
, while the validation set scores rose to a score between
and
and oscillated around that value until the early stopping was activated and stopped the training phase.
Table 5 contains evaluation results on the test set for the four previously described models. The following standard evaluation metrics were chosen: macro precision, macro recall, macro F1-score, and accuracy. Fine-tuned Inception-v3 proved to have the highest score on the test set for every evaluation metric. ResNet-34 followed with a slight difference. EM-CNN and SVM had greater drops in all evaluation metrics. Given the results, each of the models learned fairly well to classify emotions into one of the six classes when we consider that the random guessing probability for classification into one of six classes equals
.
Two-tailed permutation tests were conducted on model pairs and the results are displayed in
Table 6. The tests were performed only on macro F1-score since it is the most unbiased one of all the chosen metrics. P-values show how all the test results are statistically significant when using the Bonferroni corrected significance level of
(starting significance level was
), except the one between Inception and ResNet. Thus, we cannot claim that there is statistically significant difference in generalization performance between the two models. However, we can claim that SVM performed worst, followed by EM-CNN, while fine-tuned Inception-v3 and ResNet-34 performed best. Therefore, we decided to combine both fine-tuned CNNs for prediction on the videos from our FER classroom experiment.
4. Results
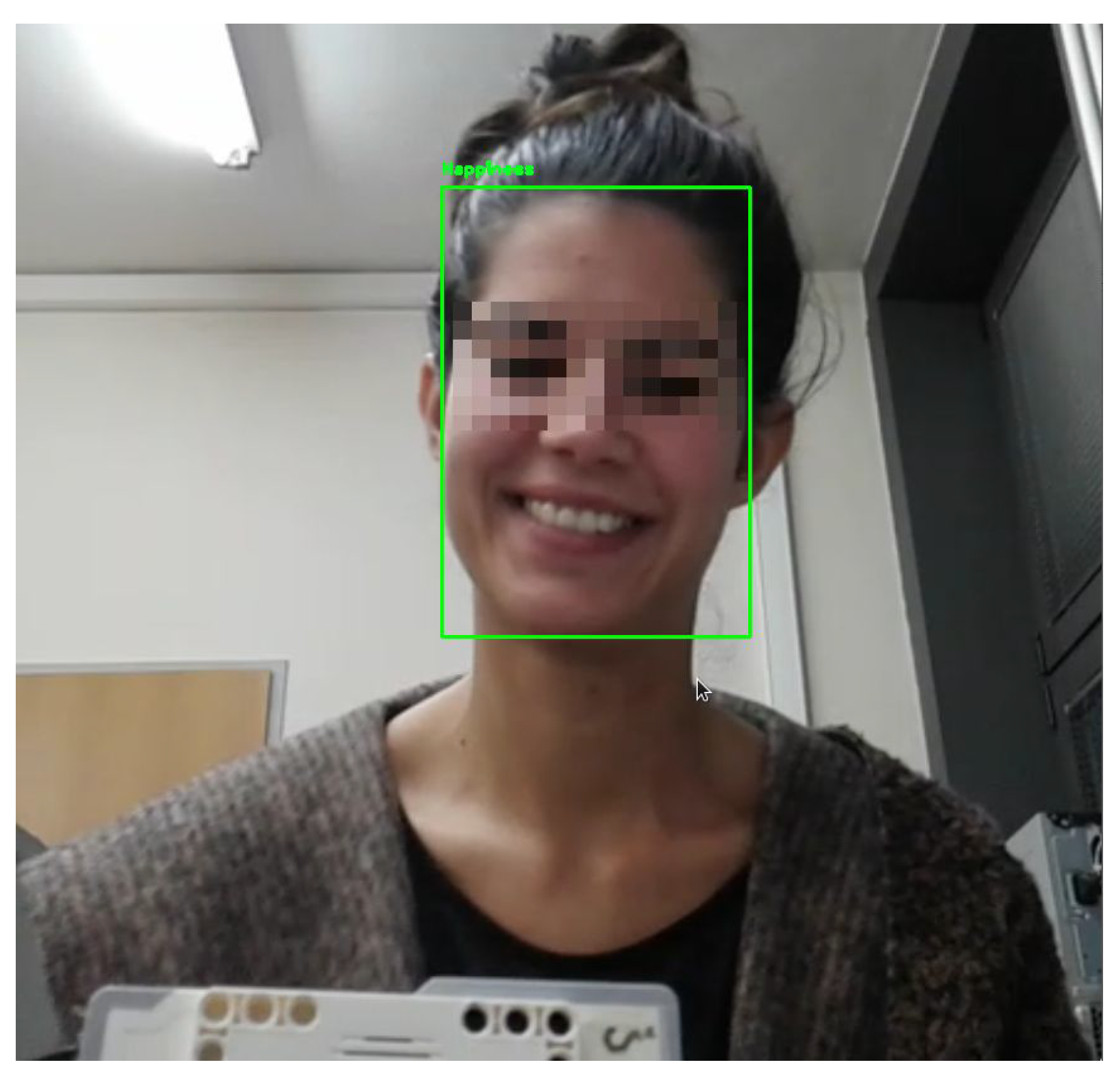
Based on the predicted emotions, labeled activities, stated gender, and extracted tasks, in this section we use statistical analysis methods to answer our research questions. Predictions of emotions in time were obtained by applying the developed models on the collected images of faces extracted from videos of experiment tasks. To obtain more robust predictions, we used prediction from both fine-tuned Inception-v3 and ResNet-34. An emotion was considered valid only if the prediction from both models applied to the extracted face was the same. In this way, we obtained 39,144 predicted emotions from roughly 23 h of video footage. This means that
of all the footage was labeled with emotions. This is one of the reasons why there are parts in videos with no recorded emotion predictions. Additionally, the SSD did not detect the face in the image. However, this was not a problem since it does not matter at what exact second an emotion occurred, but it is important in what context the emotion appeared with respect to the task being solved, gender of the participant, and the activity type that was being performed when the emotion emerged. An example of the emotion prediction on the frame from one specific video, during the
robot activity, is shown in
Figure 3.
The total counts of predicted emotions in all videos for men and women separately and together are presented in
Table 7. The process of obtaining predictions from 23 h of video footage took 4 h and 30 min on an Intel
® Core™ i7-6700HQ processor and a computer with 8 gigabytes of RAM. Therefore, for one second of the video, face detection and prediction, with the help of the two chosen models, are obtained within
s. We can observe that the most common predicted emotions were
neutral and
sadness regardless of gender. Such high numbers for a
neutral emotion were expected because for the most of the experiment participants were programming and showed no emotions. On the other hand, high numbers for the emotion of
sadness were an unexpected outcome. Fortunately, there is a simple explanation. Since the cameras were set up to record faces slightly from below, neutral faces viewed from below can appear sad. Since the
neutral emotion (and in our case
sadness) was the default facial expression in our experiment, for the remainder of the analysis we used only
happiness,
anger, and
surprise. The emotion
other was not used since it represents all other unspecific emotions, and therefore is hard to interpret.
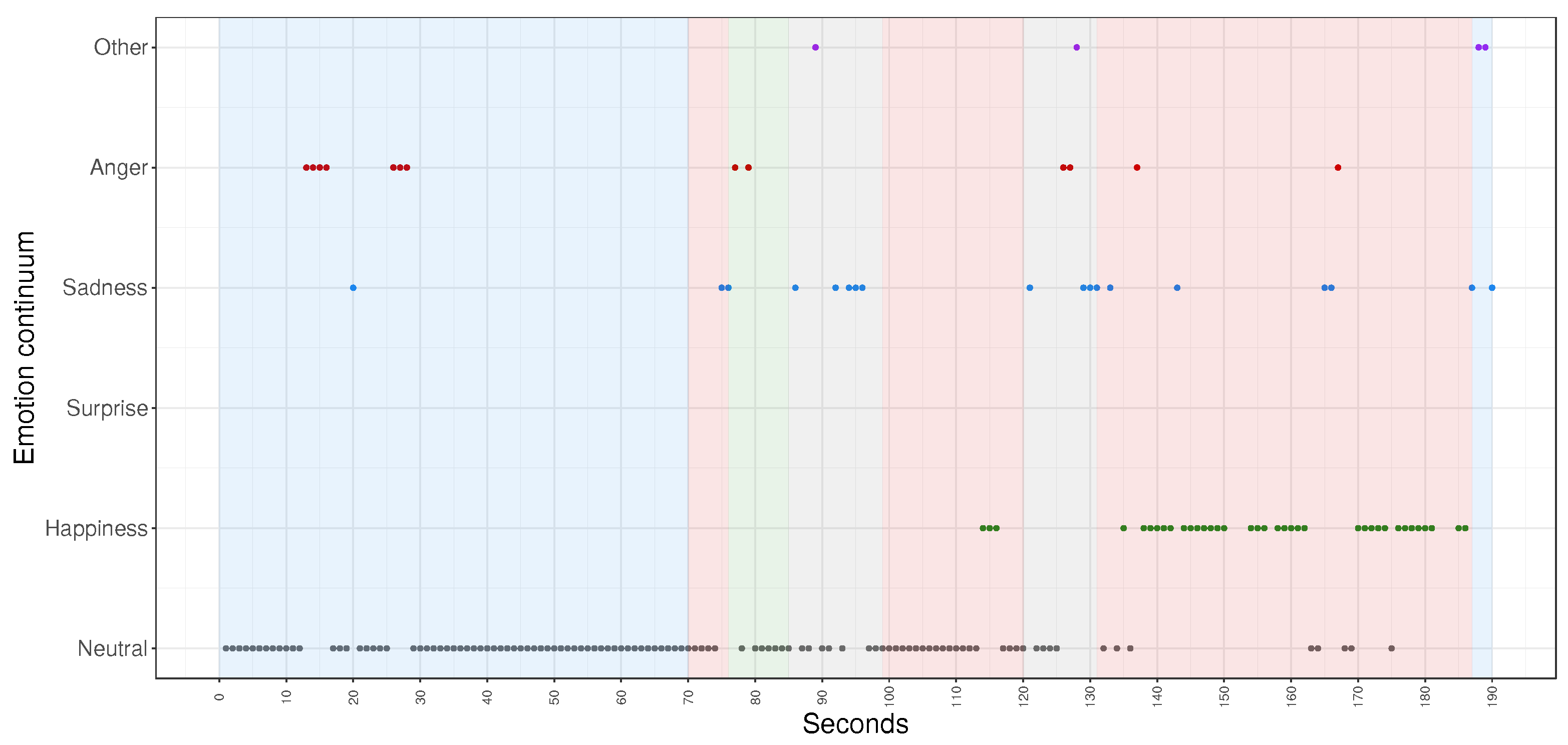
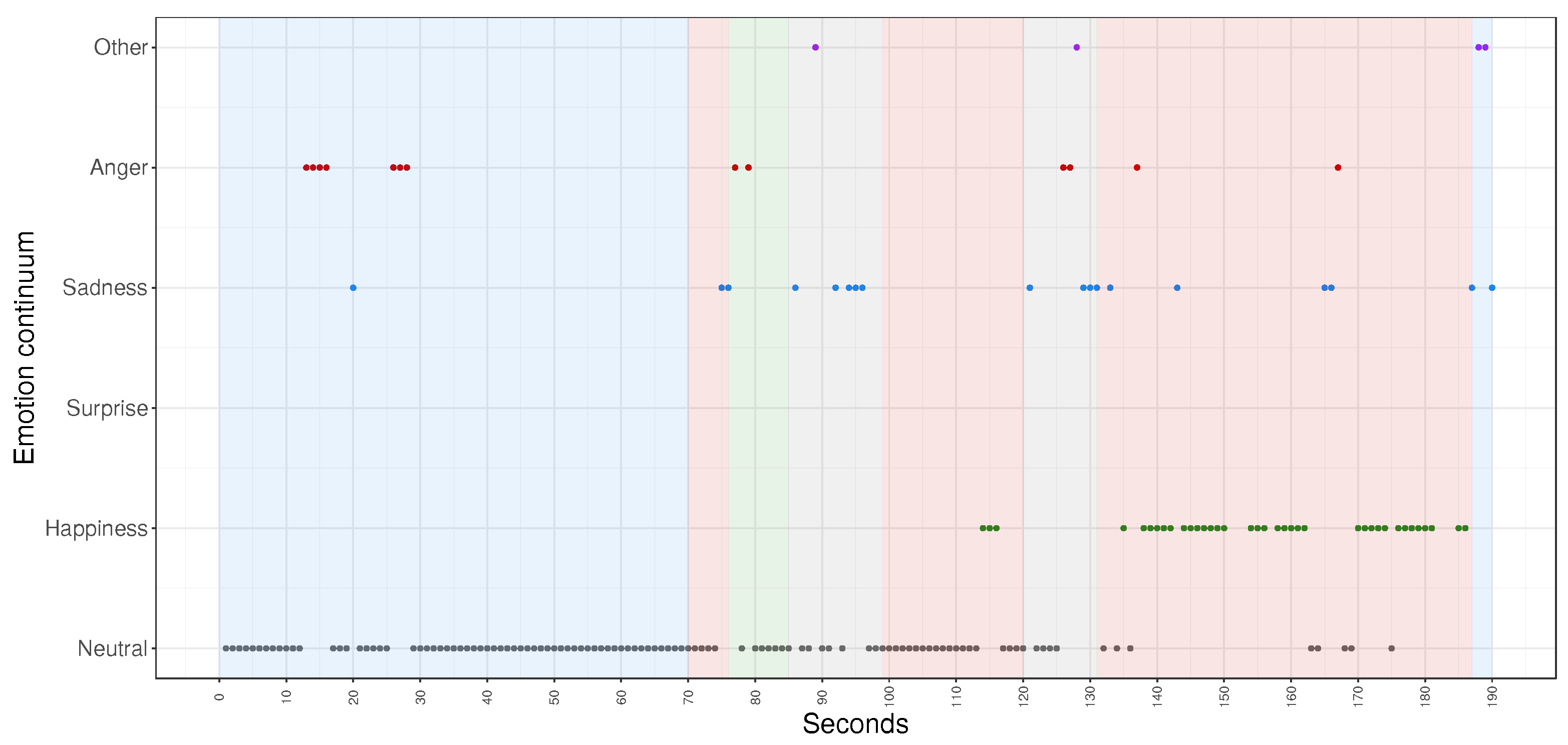
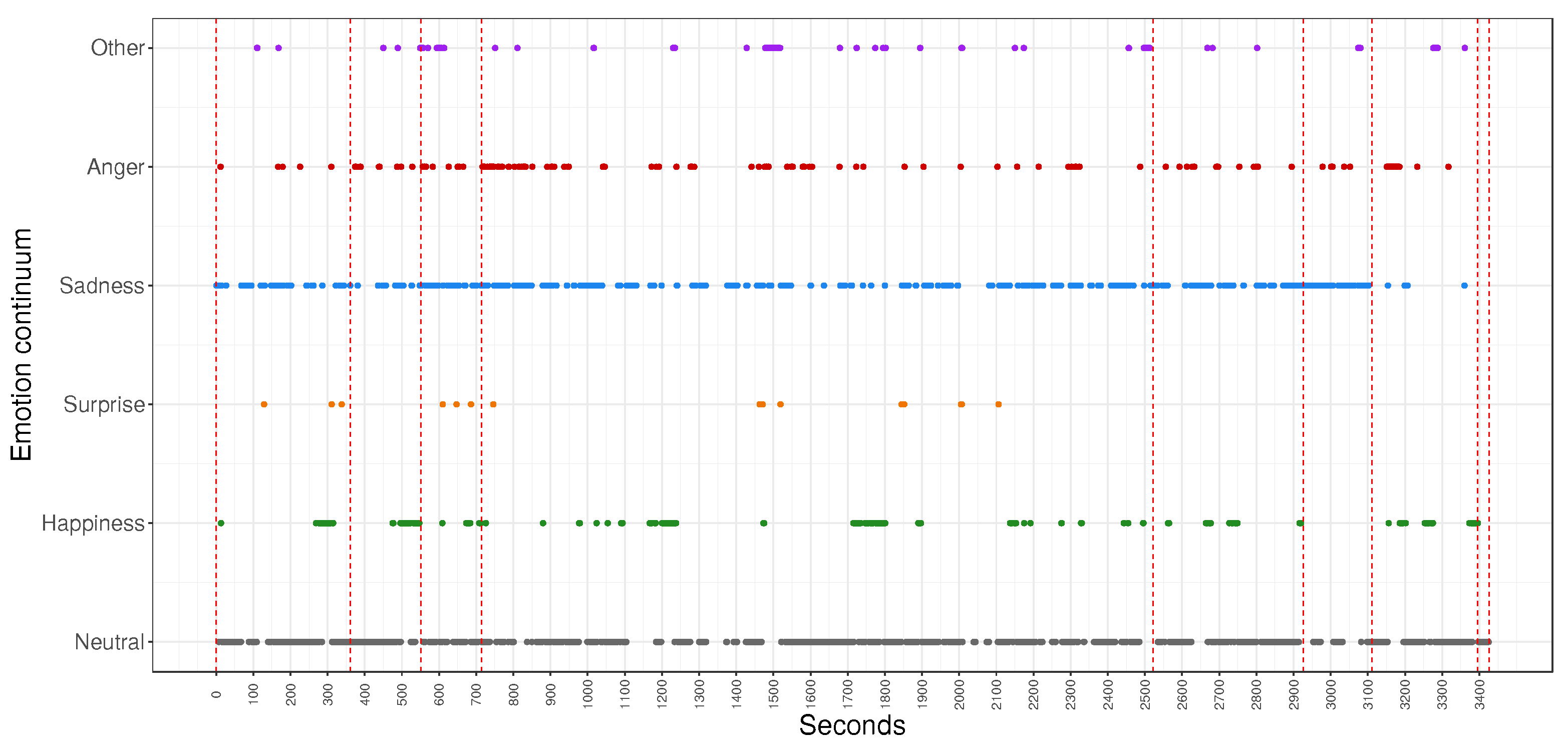
It is interesting to observe the timeline of predicted emotions for just one particular participant and one task from the experiment (
Figure 4). The y-axis shows a so-called continuum of emotions where emotions are presented gradually (1: neutral, 2: happiness, 3: surprise, 4: sadness, 5: anger, 6: other). This particular example contains occurrences of all considered emotions except
surprise with respect to all types of activities whose duration is shown using a shaded background. We can infer that the most frequently shown emotion was
neutral and that this specific participant spent most of the time at the beginning of the task doing programming (blue shaded background) while at the end of the task the participant spent most of the time using the robot (red shaded background). It can also be noticed that here the emotion of
anger occurred most often during
programming while the emotion of
happiness emerged mostly during the experimentation with the robot, while the class
other appeared the least (when we do not consider the absence of the emotion of
surprise).
Figure 5 shows predicted emotions in time for all eight tasks of the same participant as in
Figure 4. Emotions
neutral and
sadness come to the fore and both can be interpreted as
neutral as was already discussed. Since not all participants in the experiment spent the same or even a similar amount of time solving the same or distinct tasks, we turned to analysis of emotions with respect to activity types, gender, and tasks through probability distributions and statistical tests without the consideration of the absolute time component.
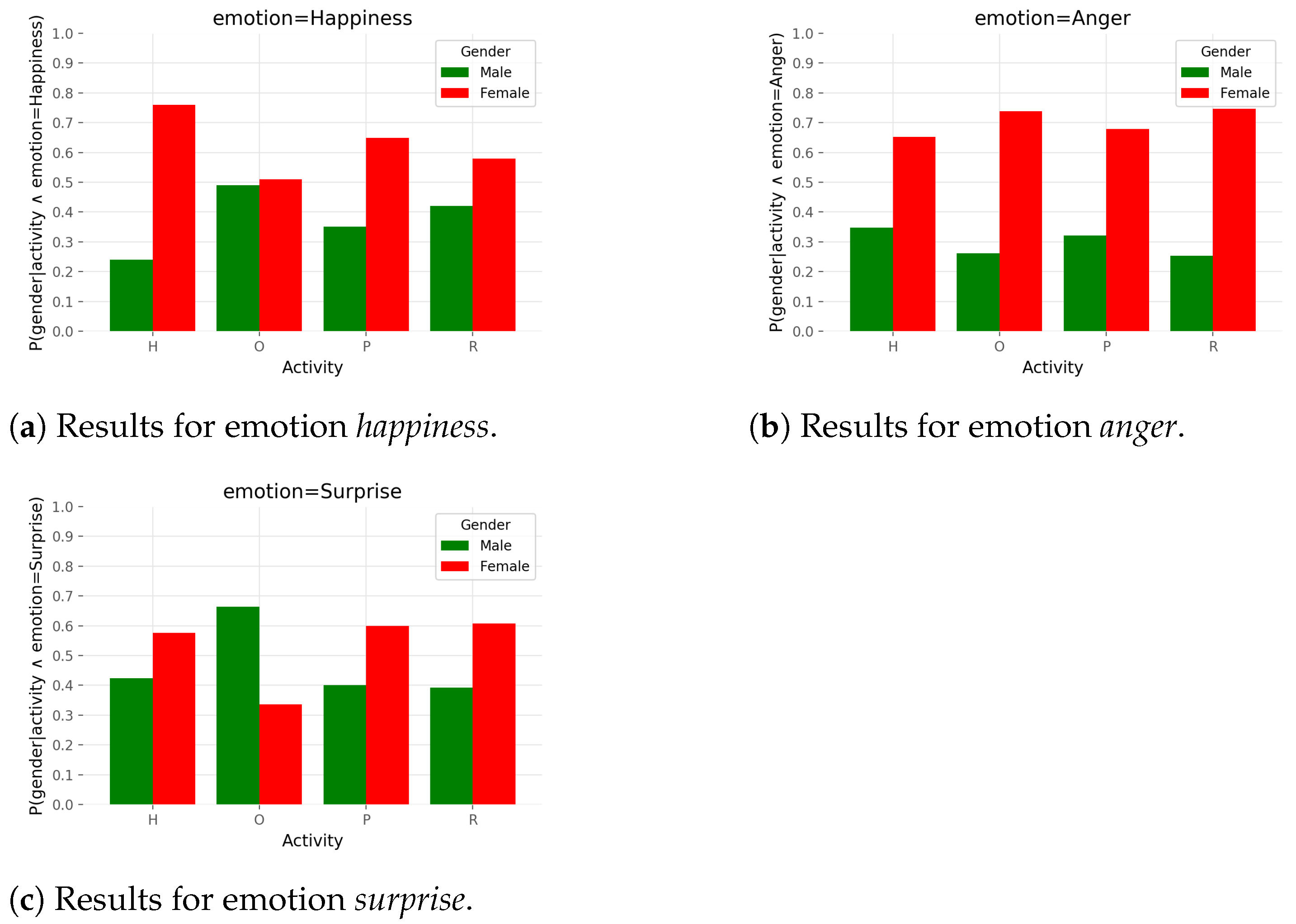
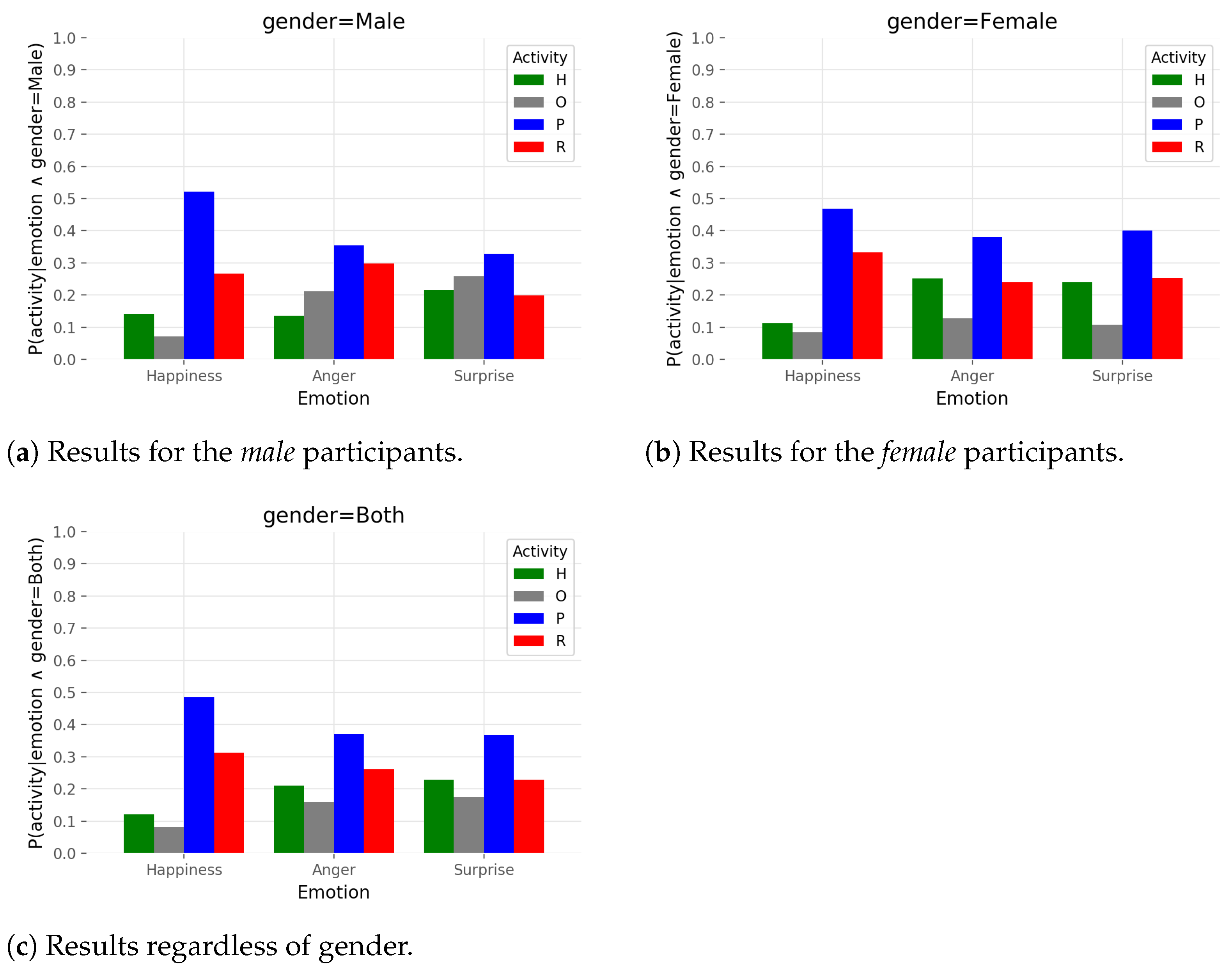
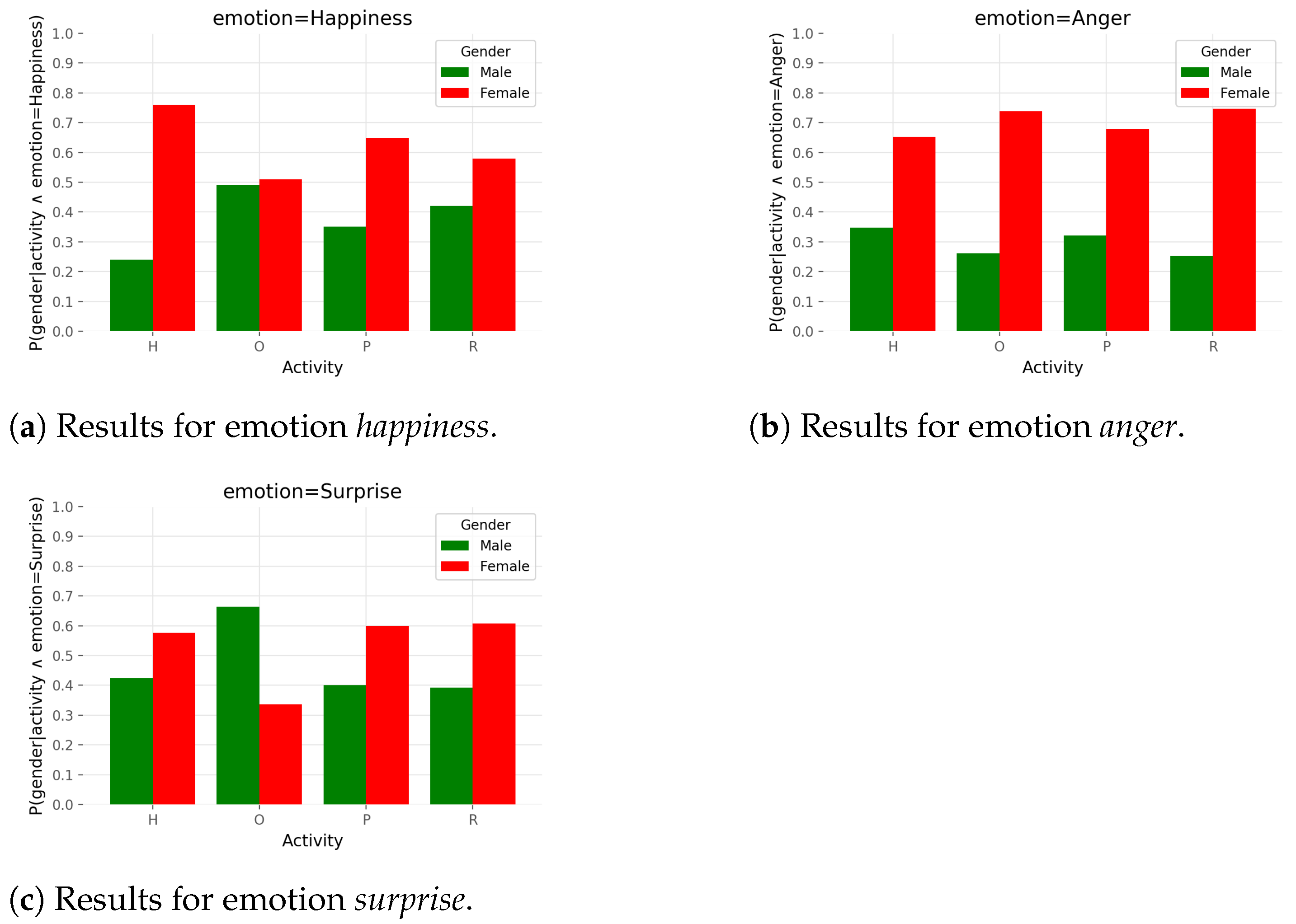
For the statistical analysis of the connection between emotions, activities, and gender, the probability distributions were employed whose parameters were estimated using the maximum likelihood estimation. The probabilities were estimated with the equation:
where
C denotes frequency. Each of the variables
can describe either emotion, activity, or gender.
correspond to concrete values of these three variables. Specifically, for probability distributions from
Figure 6, the following assignment is valid:
. Probabilities sum to
inside variable gender which leads to the fact that bar plots are comparable only inside that variable. Each graph shows one of the three chosen emotions:
happiness,
anger, and
surprise.
Figure 6 shows that for the most of the activities, female participants showed emotions of
happiness,
anger, and
surprise with higher probability than male participants. The outlier is the emotion of
surprise and activity
other from
Figure 6c where the trend is reversed. Additionally, female and male participants showed with similar probability the emotion of
happiness during the activity
other. Further, the female participants expressed with very high probability the emotion of
happiness during the activity
help and had very high probability of showing the emotion of
anger during the activity
robot.
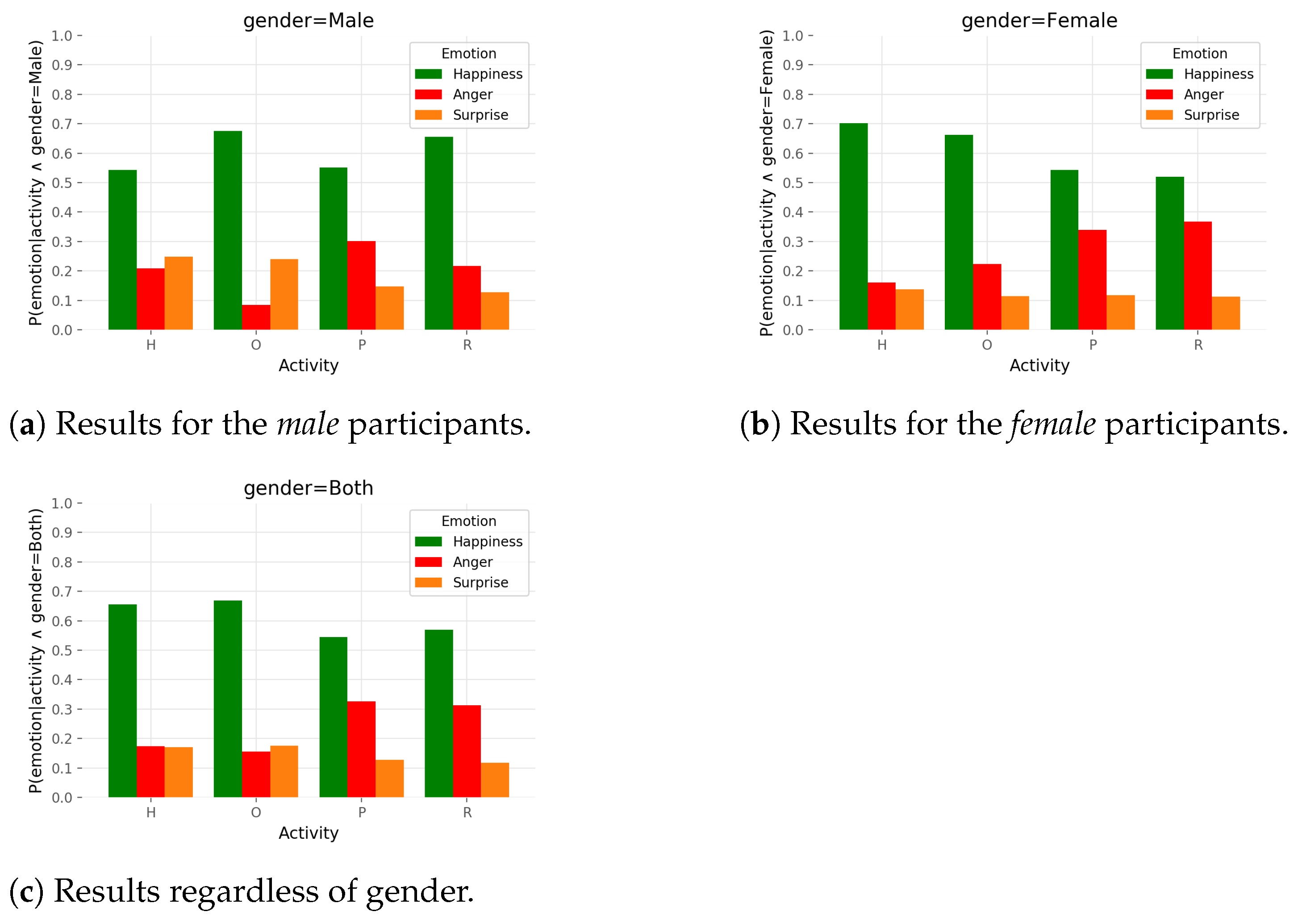
Similarly to the previous analysis, the MLE method was used to estimate the probability distributions
. Consequently, the following assignment is valid:
. Probabilities sum to
inside the variable
emotion. The results are shown in
Figure 7. The conclusion that can be drawn is that regardless of gender, the emotion of
happiness was shown with the highest probability (in this simplified scenario where only emotions of
happiness,
anger, and
surprise were considered) within all types of activities.
Anger was the second most probable emotion to appear and the emotion of
surprise had the lowest probability. Only during the
help and
other activities did male participants show more
surprise than
anger. As a result,
surprise and
anger appeared equally regardless of gender in those two activities.
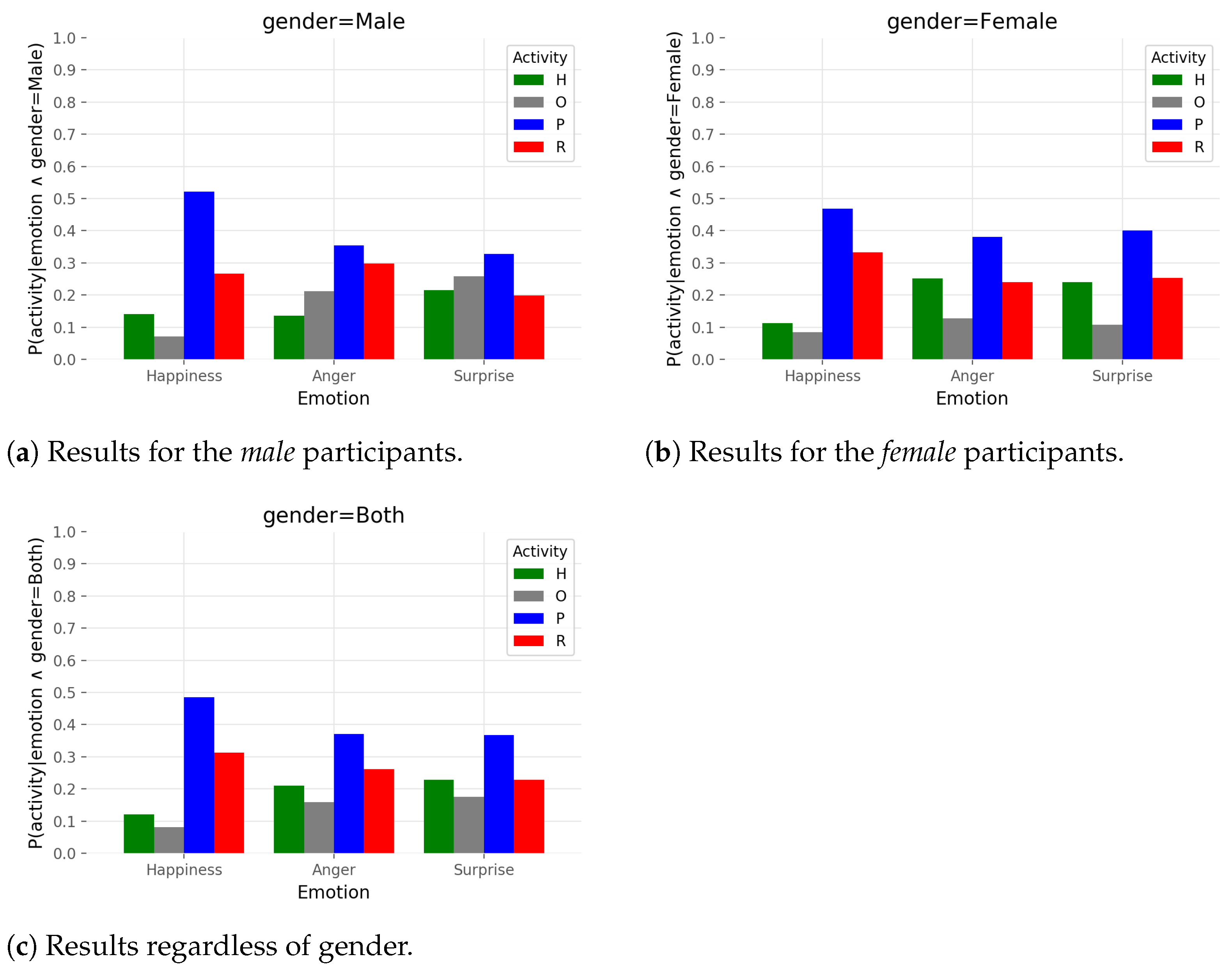
The last analysis using probability distributions describes estimated probabilities
with MLE. Variables were assigned as follows:
. Probabilities sum to
inside variable
activity. This type of visualization enables the observation of the probability of individual emotions appearing in the relationship with activity types. It is quite interesting to notice how the shapes of distributions for female experiment participants from
Figure 8b dictated shapes of distributions
regardless of gender from
Figure 8c. The inference is being imposed that, regardless of gender, the probability that some of the emotions of
happiness,
anger, or
surprise will appear is highest during the activity
programming. Right after
programming, the most probable time for emotions to appear is during the activity
robot if we observe the state shown in
Figure 8c, although the appearance of the emotion
surprise in the activities
help and
robot seems equally probable.
In order to analyze the dependency between emotions and activities through tasks,
tests of independence were carried out. The results are given in
Table 8. With chosen significance level of
, we proved that there exists dependency between the three analyzed emotions and four types of activities for almost every task. For men, the dependency was not proved for tasks 2, 5, and 6 while, for women, for tasks 3 and 6. If we look at
Table 1, it is interesting to observe that tasks 2 and 5 were short and just checked understanding of the previous tasks. They were the same as task 1 with respect to the used command, but required change in the parameters. Task 3 also did not introduce new commands but required use of mathematics or a trial and error approach. In task 6, participants needed to copy a prepared program in advance and discover the effect of the program on the robot’s behavior. Since the approach to these tasks was different from the others, that could explain why the test results were not significant. However, if we consider all tasks together, regardless of the gender of the experiment participants, there exists dependency between showing the emotion of
happiness,
anger, or
surprise and the activity type that was being performed by the participant at the moment of showing the emotion.
tests showed that there exists dependency between emotions and activities for the classroom experiment on the whole.
5. Discussion
During the experiment and analysis of the results, we noticed some potential validity threats to our research. The first big threat is that experiment participants might have changed their emotional behavior due to the fact that they knew they were being recorded with a camera while participating in the experiment. This is known as the
Hawthorne effect [
35] which could have been avoided by not telling the participants that they were going to be recorded, and asking them after the experiment if they wished for us to delete the recorded footage of them. However, this could have resulted in many of them asking us not to use their data for our research, so asking the participants to comply with our requirements before the experiment started seemed the best solution. The second big threat is potentially the selection bias since our experiment participants were mostly master’s and PhD students. Nonetheless, this only limits the selection in the aspect of the age range. Participants were still randomized in the sense that they came from different study disciplines. Regarding the conduction of the classroom experiment, we note that the tablet camera was not positioned in the optimal way and the faces were recorded tilted downward, resulting in a lot of
sadness predictions instead of
neutral. However, since the tablet cameras were the only available recording equipment, we positioned them in the best possible way we could. Furthermore, by applying stricter conditions on the behavior of the participants in the experiment, we could have limited the appearance of the activity type
other. Nonetheless, we believe that this would have only accentuated the Hawthorne effect. Finally, although the annotation of the video data of the experiment with activity types was a pretty straightforward task and we opted to use one annotator per video, it would always be better to use two or more annotators per video to avoid potential labeling errors.
In the future work, we would like to collect more data for learning of the models, and re-conduct the classroom experiment with better camera positioning and stricter conditions on the behavior of the participants in the experiment. Additionally, we would like to explore if using the available audio data from the video recordings would enhance the quality of emotion predictions.
6. Conclusions
The goal of this study was to investigate the dependency of shown emotion, the activities, tasks, and gender during a robotics workshop, which is an example of an active teaching setting in the classroom. The tasks were given sequentially, from easier to harder, by introducing new commands and concepts. The experiment participants stated their gender, while the activities (programming, robot, help, other) were manually labeled by annotators. The most demanding part was to detect emotions. Therefore, much of the work was done to develop appropriate emotion recognition models. The training data for these models were collected from images of three well-known data sets for emotion recognition: CK+, FER-2013, and SFEW. Four models were developed on the collected data: one with the help of traditional machine learning and three using deep learning methods. The models were thoroughly compared by measuring prediction success on the test set and two of the models were selected to predict emotions on videos of the robotics workshop. The best models were fine-tuned Inception-v3 and ResNet-34. Their application enabled us to carry out the statistical data analysis, which provided insights into the relationship between emotions, gender, tasks, and types of activities and at the same time revealed answers to our research questions. Experiment participants mostly showed a neutral emotion during the classroom experiment. The most common emotions (neutral and sadness) were eliminated from the analysis and only emotions of happiness, anger, and surprise were statistically investigated. Female participants showed emotions of happiness, anger, and surprise more frequently and more noticeably (e.g., anger during the robot activity and happiness during the help activity) than male participants. Within all types of activities, the emotion of happiness was the most likely to appear. Participants were the most likely to show emotions of happiness, anger, or surprise during the activity programming. Statistical tests showed that there is dependency between showing the three chosen emotions and the four activities during the classroom experiment. The stated conclusions prove that FER can be used to evaluate the effect of active teaching methods in the physical classroom.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 activity
activity