Fast Sidelobe Calculation for Planar Phased Arrays Using an Iterative Sidelobe Seeking Method


Abstract

1. Introduction
2. Formulation and Algorithm
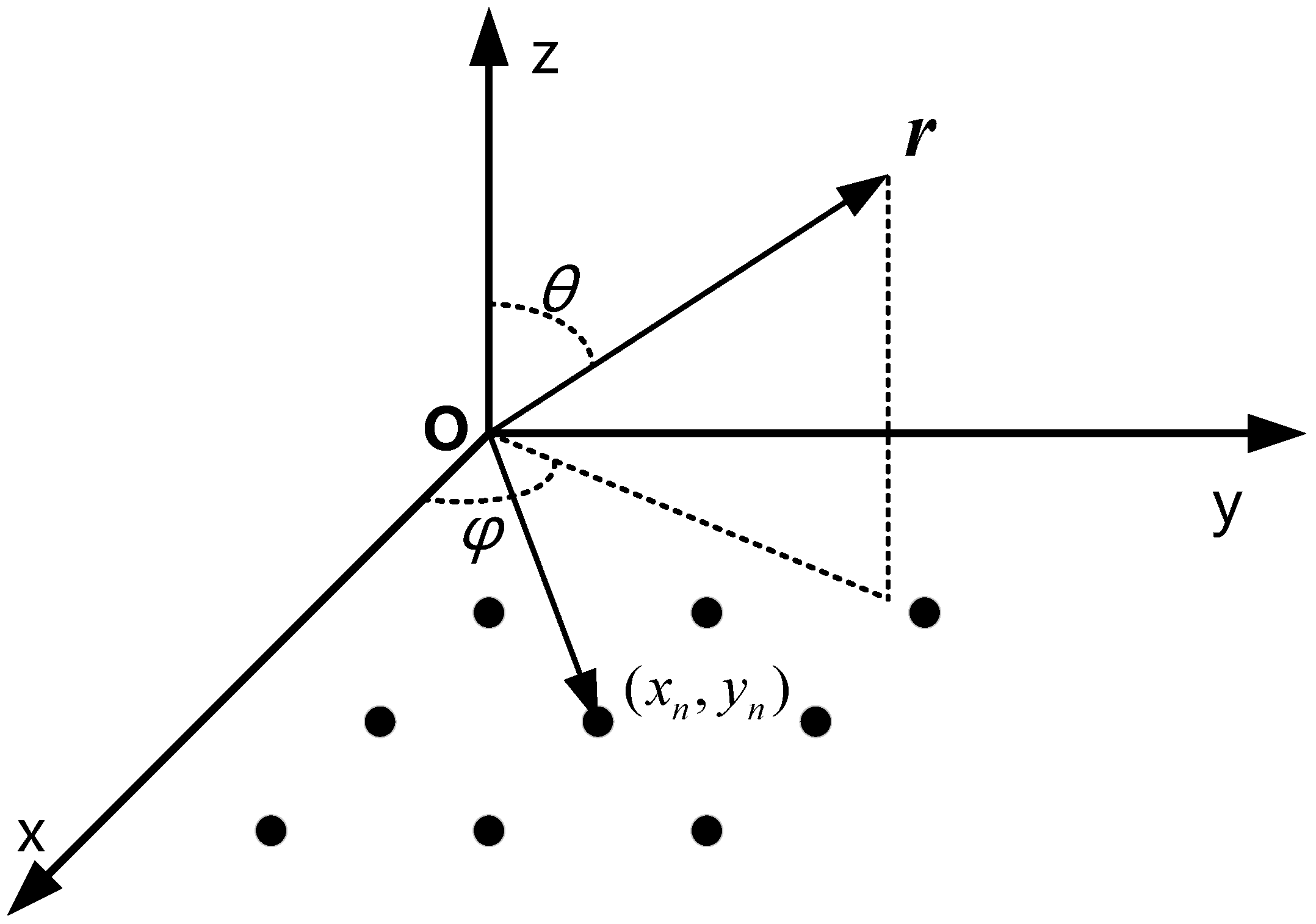
2.1. Formulation of Sidelobes in a Planar Phased Array
2.2. Newton’s Iterative Method
2.3. Iterative Sidelobe-Seeking Framework
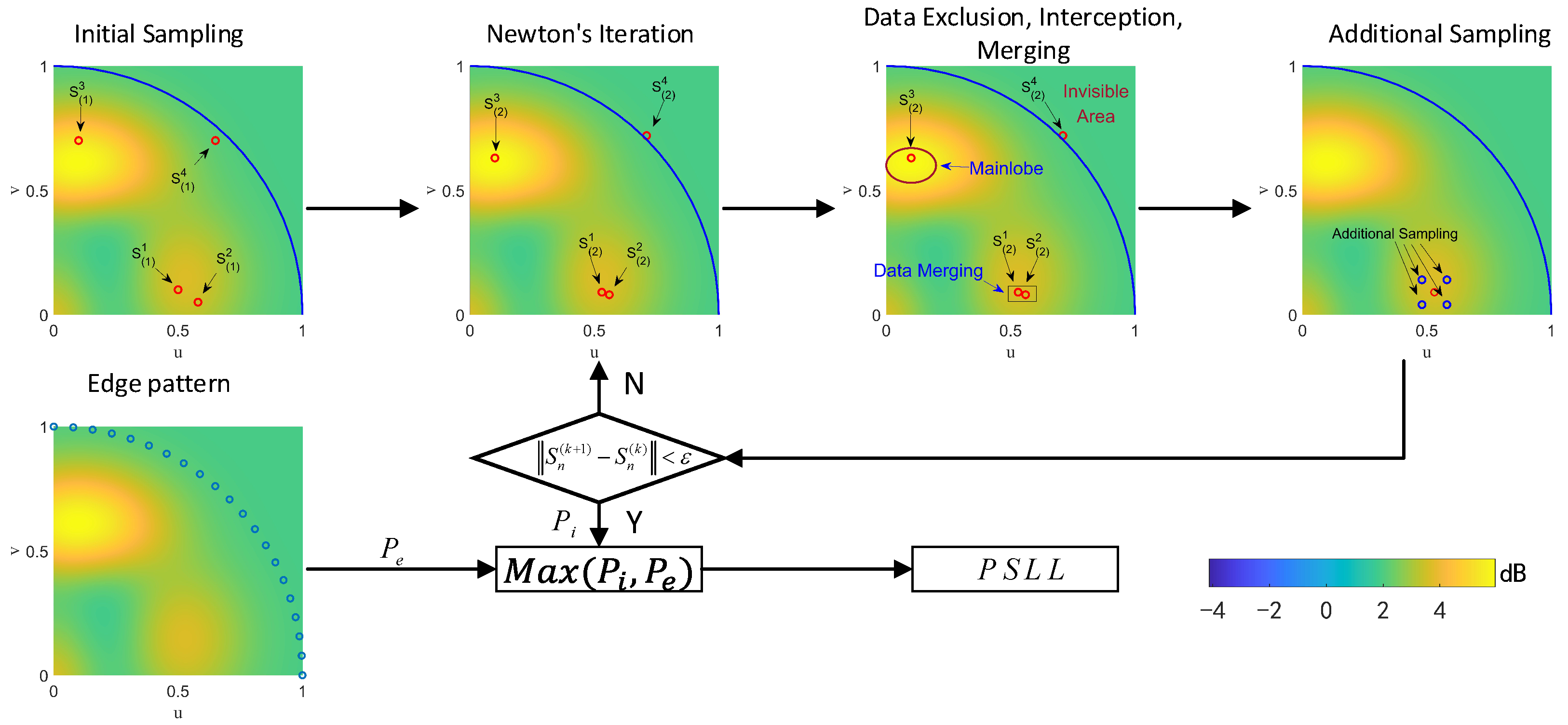
2.3.1. Initial Sampling
2.3.2. Newton’s Iteration
2.3.3. Data Processing
- Data exclusion. The iterated points may move out of the visible area or into the main lobe area. These points should be excluded due to their meaninglessness for subsequent solution. The visible area conforms to .The main lobe area requires an evaluation of beam width. We first calculate the pattern of the array in -cut and -cut as,Secondly, the dB beam width can be determined from each cut pattern. is set according to the size of the array. The two beam widths are defined as and . As the main lobe is approximately elliptical in the system, the area is marked as,
- Data interception. This step cuts off the iterated points with low power due to their low possibility of iterating to the extreme points. The criteria for the interception are a certain proportion of the total points or a certain power value.
- Data merging. This step merges the close points into one point. If two points and meet the condition , they are to be merged. L is a preset parameter.
2.3.4. Additional Sampling
2.3.5. Iteration and the Iteration End
2.3.6. Edge Pattern
2.3.7. Final Result
2.4. Analysis of Computational Complexity
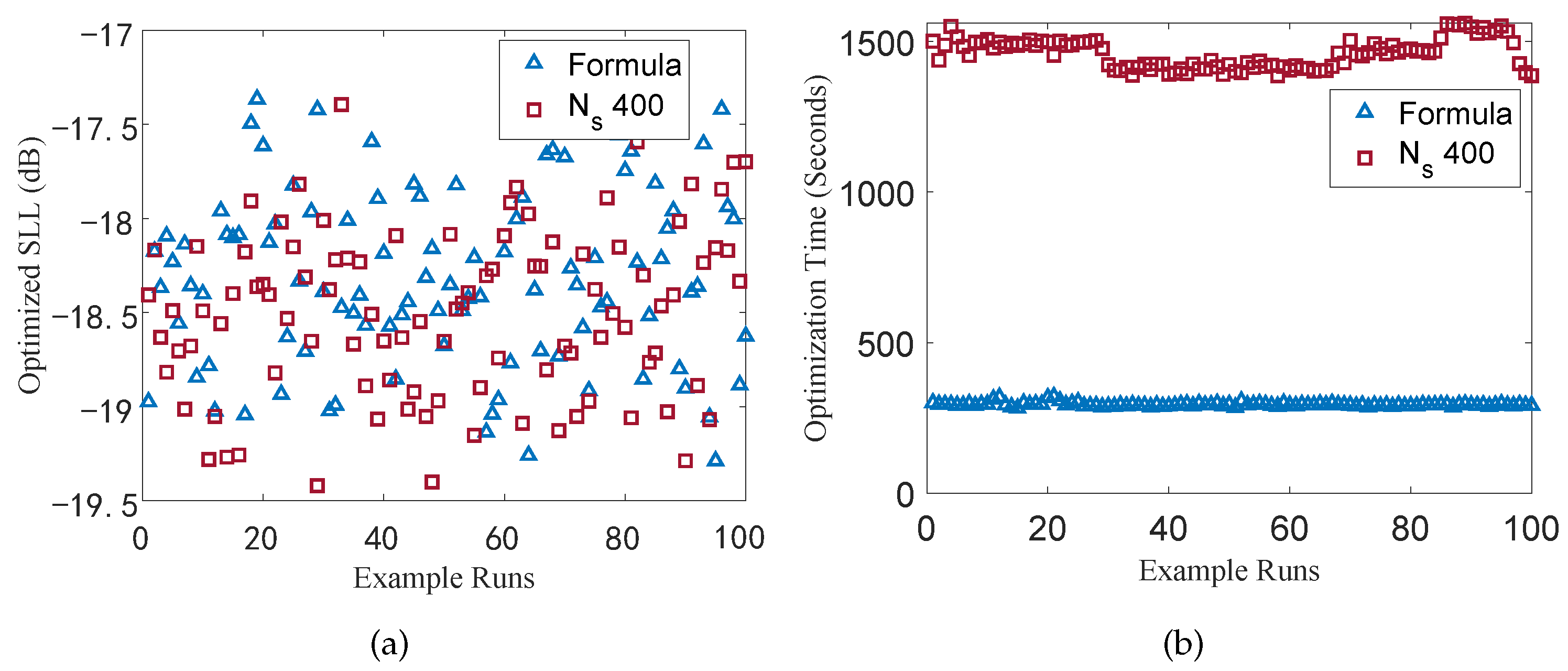
3. Numeric Experiments and Results
3.1. Sidelobe Calculation for Square Aperture Arrays
3.2. Sidelobe Calculation for Circular Array with Taylor Weighting
3.3. Synthesis of Sparse Planar Arrays
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Brookner, E. Advances and breakthroughs in radars and phased-arrays. In Proceedings of the 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 10–13 October 2016; pp. 1–9. [Google Scholar] [CrossRef]
- Warnick, K.F.; Maaskant, R.; Ivashina, M.V.; Davidson, D.B.; Jeffs, B.D. Phased Arrays for Radio Astronomy, Remote Sensing, and Satellite Communications; Cambridge University Press: Cambridge, UK, 2018. [Google Scholar]
- Lopezf, J.; Tsay, J.; Guzman, B.; Mayeda, J.; Lie, D. Phased arrays in wireless power transfer. In Proceedings of the 2017 IEEE 60th International Midwest Symposium on Circuits and Systems (MWSCAS), Boston, MA, USA, 6–9 August 2017; pp. 5–8. [Google Scholar] [CrossRef]
- Mailloux, R.J. Phased Array Antenna Handbook, 3rd ed.; Artech House: Norwood, MA, USA, 2018. [Google Scholar]
- Balanis, C.A. Antenna Theory: Analysis and Design, 4th ed.; Wiley: Hoboken, NJ, USA, 2015. [Google Scholar]
- Chen, K.; Yun, X.; He, Z.; Han, C. Synthesis of Sparse Planar Arrays Using Modified Real Genetic Algorithm. IEEE Trans. Antennas Propagat. 2007, 55, 1067–1073. [Google Scholar] [CrossRef]
- Rocha-Alicano, C.; Covarrubias-Rosales, D.; Brizuela-Rodriguez, C.; Panduro-Mendoza, M. Differential evolution algorithm applied to sidelobe level reduction on a planar array. AEU-Int. J. Electron. Commun. 2007, 61, 286–290. [Google Scholar] [CrossRef]
- Cen, L.; Yu, Z.L.; Ser, W.; Cen, W. Linear Aperiodic Array Synthesis Using an Improved Genetic Algorithm. IEEE Trans. Antennas Propagat. 2012, 60, 895–902. [Google Scholar] [CrossRef]
- Pappula, L.; Ghosh, D. Linear Antenna Array Synthesis using Cat Swarm Optimization. AEU-Int. J. Electron. Commun. 2014, 68, 540–549. [Google Scholar] [CrossRef]
- Liu, H.; Zhao, H.; Li, W.; Liu, B. Synthesis of Sparse Planar Arrays Using Matrix Mapping and Differential Evolution. IEEE Antennas Wirel. Propagat. Lett. 2016, 15, 1905–1908. [Google Scholar] [CrossRef]
- Pinchera, D.; Migliore, M.D.; Panariello, G. Synthesis of Large Sparse Arrays Using IDEA (Inflating-Deflating Exploration Algorithm). IEEE Trans. Antennas Propagat. 2018, 66, 4658–4668. [Google Scholar] [CrossRef]
- Anselmi, N.; Rocca, P.; Salucci, M.; Massa, A. Irregular Phased Array Tiling by Means of Analytic Schemata-Driven Optimization. IEEE Trans. Antennas Propagat. 2017, 65, 4495–4510. [Google Scholar] [CrossRef]
- Dong, W.; Xu, Z.H.; Liu, X.; Wang, L.; Xiao, S.P. Modular Subarrayed Phased Array Design by Means of Iterative Convex Relaxation Optimization. IEEE Antennas Wirel. Propagat. Lett. 2019, 18, 447–451. [Google Scholar] [CrossRef]
- Yang, K.; Wang, Y.; Tang, H. A Subarray Design Method for Low Sidelobe Levels. Prog. Electromagn. Res. Lett. 2020, 89, 45–51. [Google Scholar] [CrossRef][Green Version]
- Hwang, Y.; Han, C. The use of GTD in the design and analysis of low sidelobe reflector antennas. Proc. Antennas Propag. Soc. Int. Symp. 1981, 19, 484–487. [Google Scholar] [CrossRef]
- Odendaal, J.; Pistorius, C. Horn Antenna with Suppressed Sidelobe Level. Microw. Opt. Technol. Lett. 1991, 4, 238–239. [Google Scholar] [CrossRef]
- Rocca, P.; Mailloux, R.J.; Toso, G. GA-Based Optimization of Irregular Subarray Layouts for Wideband Phased Arrays Design. IEEE Antennas Wirel. Propagat. Lett. 2015, 14, 131–134. [Google Scholar] [CrossRef]
- Miao, K.; Zhang, Y.; Sun, H. Fast Sidelobe Calculation and Suppression in Arbitrary Two-Dimensional Phased Arrays. IEEE Antennas Wirel. Propagat. Lett. 2021, 20, 928–932. [Google Scholar] [CrossRef]
- Sauer, T. Numerical Analysis; Pearson Education: Boston, MA, USA, 2011. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Array Size | 400 | 900 | 1600 | 2500 |
|---|---|---|---|---|
| Proposed ( 44) | 0.013 | 0.022 | 0.064 | 0.052 |
| Proposed ( 46) | 0.003 | 0.022 | 0.035 | 0.046 |
| Proposed ( 48) | 0.002 | 0.016 | 0.023 | 0.049 |
| Proposed ( 50) | 0.001 | 0.012 | 0.010 | 0.035 |
| Conventional ( 400) | 0.009 | 0.023 | 0.040 | 0.061 |
| Conventional ( 200) | 0.045 | 0.089 | 0.167 | 0.189 |
| Fast method in [18] | 0.003 | 0.033 | 0.039 | 0.061 |
| Array Size | 400 | 900 | 1600 | 2500 |
|---|---|---|---|---|
| Proposed ( 44) | 0.124 | 0.164 | 0.257 | 0.368 |
| Proposed ( 46) | 0.130 | 0.189 | 0.271 | 0.385 |
| Proposed ( 48) | 0.144 | 0.202 | 0.285 | 0.405 |
| Proposed ( 50) | 0.147 | 0.216 | 0.307 | 0.457 |
| Conventional ( 400) | 1.106 | 1.824 | 2.850 | 4.184 |
| Conventional ( 200) | 0.277 | 0.459 | 0.718 | 1.050 |
| Fast method in [18] | 0.283 | 0.462 | 0.709 | 1.100 |
| Sampling Type | Sampling Number | Mean Error (dB) | Time (s) |
|---|---|---|---|
| Random | 2049 | 0.0188 | 0.3094 |
| Random | 1984 | 0.0214 | 0.3006 |
| Random | 1746 | 0.0311 | 0.2725 |
| Random | 1596 | 0.0397 | 0.2610 |
| Random | 1442 | 0.0483 | 0.2516 |
| Rectangular | 1961 ( 50) | 0.0095 | 0.3061 |
| Rectangular | 1793 ( 48) | 0.0231 | 0.2835 |
| Rectangular | 1576 ( 46) | 0.0265 | 0.2707 |
| Conventional Method | Fast Formula Method | Proposed Method | |
|---|---|---|---|
| Time Complexity | O (mn) | O (n) | O (mn) |
| Computing Time | slow | fast | middle |
| Scope of Application | any planar arrays | planar arrays with given positions | any planar arrays |
| Accuracy | high | middle | high |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miao, K.; Zhang, Y.; Jing, H.; Wang, S.; Sun, H. Fast Sidelobe Calculation for Planar Phased Arrays Using an Iterative Sidelobe Seeking Method. Electronics 2022, 11, 3366. https://doi.org/10.3390/electronics11203366
Miao K, Zhang Y, Jing H, Wang S, Sun H. Fast Sidelobe Calculation for Planar Phased Arrays Using an Iterative Sidelobe Seeking Method. Electronics. 2022; 11(20):3366. https://doi.org/10.3390/electronics11203366
Chicago/Turabian StyleMiao, Ke, Yi Zhang, Handan Jing, Shuoguang Wang, and Houjun Sun. 2022. "Fast Sidelobe Calculation for Planar Phased Arrays Using an Iterative Sidelobe Seeking Method" Electronics 11, no. 20: 3366. https://doi.org/10.3390/electronics11203366
APA StyleMiao, K., Zhang, Y., Jing, H., Wang, S., & Sun, H. (2022). Fast Sidelobe Calculation for Planar Phased Arrays Using an Iterative Sidelobe Seeking Method. Electronics, 11(20), 3366. https://doi.org/10.3390/electronics11203366