Abstract
Event detection is usually the primary purpose of wireless sensor networks (WSNs). Therefore, it is crucial to determine where and when an event occurs in order to map the event to its spatio-temporal domain. In WSN localization, a few anchor nodes are those aware of their locations via the Global Positioning System (GPS), which is energy-consuming. Non-anchor nodes self-localize by gathering information from anchor nodes to estimate their positions using a localization technique. Traditional algorithms use at least three static anchors for the localization process. Recently, researchers opted to replace multiple static anchors by a single mobile anchor during the localization process. This paper proposes a Kalman filter based on bounding box localization algorithm (KF-BBLA) in WSNs with mobile anchor node. We present a new mobile anchor localization strategy to minimize energy, hardware costs, and computation complexity, while improving accuracy and cost-effectiveness. Network connectivity measurement and the bounding box localization method are used in order to identify the bounded possible localization zone. The Kalman filter is then used to minimize the uncertainty produced by the connectivity process. We aim also to minimize the localization inaccuracies generated by the bounding box algorithm. Simulation results show that our proposed approach significantly reduces the localization error compared to other localization algorithms chosen from the recent literature by up to . We use the cumulative distribution function (CDF) as an indicator to assess the accuracy of our proposed algorithm.
1. Introduction
Wireless sensor networks (WSNs) are the result of advancements in wireless communication, embedded systems, and the Internet-of-Things technology [1,2]. This emerging technology consists of low-cost, low-power, tiny sensor nodes that communicate with each other to collect and process information gathered from their sensing field [3,4]. WSNs have achieved high interest nowadays, especially in green technology [5], vehicular networks [6,7], and Internet of Things (IoT) [8,9]. WSNs have been used in many applications, such as security applications [10], object tracking for military applications, healthcare applications, and environmental applications [11,12,13].
In WSNs, the geographic position of each sensor node within the network must be known because it provides fundamental support for many applications, such as fire detection in forests, military surveillance, healthcare [9,14], disaster relief [15,16], and target tracking [17]. Localization is also linked with the field of human–machine interaction and autonomous systems.
Localization presents a key aspect in WSNs and robotics, mainly where the Global Positioning Systems (GPS) cannot be implemented at sensor nodes [18]. Distributed robotics and WSNs collaborate to create Mobile Sensor Networks (MSNs) [19], where the localization process is more challenging due to node mobility.
Regarding the limited cost and complexity of WSN platforms [20], several methods are used to solve the WSN node localization problem [21,22], such as Time of Arrival (TOA) [23], Time Difference of Arrival (TDoA) [24], and Angle of Arrival (AoA) [25], as well as the Received Signal Strength (RSS) [26,27], where the signal strength is inversely proportional to the squared distance, so that a radio propagation model can be used to convert the signal strength into distance. In the range-based case, the Kalman filter [28] is used in the localization process of sensor nodes to filter the estimated distance based on RSSI or ToA. Proposed in the early 1960s, the Kalman filter is a recursive algorithm based on a model of dynamic systems, modeled via state equations and onboard sensor measurements to obtain an estimation of the state vector while minimizing the covariance error [19,29,30].
Localization techniques generally involve anchor nodes in the localization process. These anchors are position-aware nodes acting via GPS units to assist the localization of unknown nodes by providing reference positions and information [31]. Anchor nodes are generally more costly than ordinary nodes and consume more energy, which is restrictive for battery-powered devices. Therefore, to provide a cost-effective WSN, the minimum number of anchor nodes must be deployed.
Multi-hop methods are almost range-free but can also use the estimation of distances via hop-count information [22,32]. They aim to determine a connectivity graph and then try to make it fit the known positions as accurately as possible. The solution is to deploy only an anchor node that can mobilize along a planned or a random trajectory within the network. This anchor node periodically broadcasts its location information to help unknown nodes to estimate their positions via the hop-count information and the anchor coordinates [33,34], as in the example shown in Figure 1. The mobile anchor in this example is moving via a robot within the network in a random manner. N1, N2, and N3 are the unknown nodes. N1 is directly connected to the mobile anchor and the node N2, which have the same communication range. Thus, for example, the hop count of node N2 is 1 = min(1,2), and the hop count of node N3 is 2 = min(2,3).
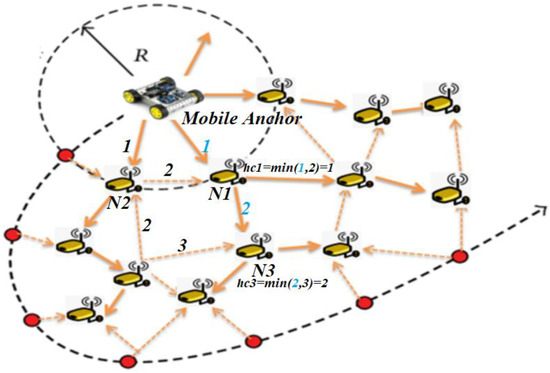
Figure 1.
Localization assisted by mobile anchor node.
Using one mobile anchor gives many extra anchor locations; it is also a technique to minimize the number of static anchor nodes deployed in the WSN. This mobile anchor, broadcasting its position regularly, would be moving around the WSN deployment area and following a predetermined planned path. In our work, we assumed that the anchor node moves following a random path model by the famous Random Waypoint model (RWP) [35].
To the best of our knowledge, there is no previous work based on an enhanced bounding box localization method for WSNs. In this work, we leverage the use of the bounding box method for sensor node localization using a mobile anchor. Moreover, the Kalman filter is used to refine and improve the accuracy of the estimated position.
This paper focuses on a novel localization algorithm (KF-BBLA) in WSNs with mobile anchor nodes. The proposed method operates as follows. First, it computes the minimum hop number between nodes. Then, it uses the bounding box method to determine the possible zone of the unknown node location. Finally, the Kalman filter technique is used to estimate the position of the unknown node.
In summary, the main contribution of our work is the use of Kalman filter to achieve better localization accuracy with a mobile anchor node. We verify the effectiveness of the proposed method through simulation experiments. Moreover, the proposed contribution in this paper can achieve improved localization accuracy by up to when compared with other localization algorithms form the literature.
The remainder of this paper is organized as follows. In the next section, we present related works on localization algorithms. Section 3 shows the research material and methods used in the proposed algorithm. Then, we propose our localization algorithm in Section 4. We present simulation experiments and compare and analyze the simulation results in Section 5. Finally, we conclude our paper in Section 6.
2. Related Works
The localization in WSNs with a mobile anchor needs to compute the node position location sequentially in real time. Monte Carlo Localization (MCL), proposed by Hu and Evans [36], is the most well-known localization technique for WSNs with the presence of mobility. This technique does not need additional hardware and estimates the node’s location area sequentially. Baggio et al. [37] constrain the researched area, where different samples are defined by building a box based on MCL. This proposed technique is named Monte Carlo Localization Boxed (MCB). MCB helps to speed up the drawing of the position samples. Thus, the resulted estimation accuracy is improved. Many other improvements of MCB are shown in the literature, such as MSL [38], MMCL [37], and RSS-MCL [39]. The authors in [40] proposed a cooperative localization method with bounding constraints for MSNs. The proposed technique predicts the trajectory using the polynomial Newton interpolation and bounding box.
The authors in [41] presented a localization technique called mobile anchor centroid localization (MACL) using only one mobile anchor node. This method is based on the radio frequency. Thus, the hardware cost is minimized. Different works have been developed to test the utility of localization using mobile anchor nodes. The research work in [42] presents a localization method based on a mobile anchor node using the trilateration method. The proposed technique uses mobile anchor nodes that shift along the trajectory. Han et al. have proposed in [43] a mobile anchor-based localization algorithm called the mobile anchor-assisted localization algorithm based on a regular hexagon (MAALRH). This technique is based on regular hexagonal shapes in two-dimensional (2D) WSNs. This algorithm presents good localization accuracy compared with other algorithms in the literature, but it is not effective in the case of randomly deployed nodes. The authors in [44] proposed a three-dimensional localization method based on a mobile anchor node for wireless sensor networks. They used the RSSI ranging and TOA ranging techniques to obtain information about the distance between the mobile anchor and the unknown node. The authors proved the effectiveness of the proposed RSSI-TOA method by simulation results. However, as these ranging techniques can be greatly affected by the environment and the node devices, the localization error may not be very effective.
Previously, most localization techniques were based on the numerical computation of numerous network parameters, such as the power of the transmitter or receiver, network connectivity information, radio transmission, and transmission and reception time [45]. The cited parameters include many constraints, including the environmental conditions and complications. Many localization methods in the literature focus on minimizing the localization errors during the localization process. In [46], the authors presented a modified Kalman filter (KF) for positioning based on Unscented Kalman Filter (UKF) and Particle Filter (PF) Localization. The proposed localization technique is suitable for any localization network, especially for robot localization. Ref. [47] proposed a range-free localization method. The proximity coefficient is used to estimate the relative position. The geographical distance to neighbors is then estimated through collaborative exchange and, finally, the bounding box is used to refine localization result. The node localization algorithm presented in [48] is based on virtual partition and distance correction. Each hop distance on the shortest path between the sensor node and the anchor node is estimated. The actual distance to the anchor node is then corrected as the shortest path is not a straight line.
The anchor node can move within a random or planned path. Many studies have been conducted to achieve the optimization of anchor path planning [3,49,50]. Random path models are used in many localization algorithms, such as the Random Waypoint (RWP) model, in which the direction and speed of the mobile anchor node are modified randomly for the localization of unknown nodes [35]. The RWP is a well-known mobility model, first proposed for wireless routing in ad hoc networks. This model was then developed to be implicated in localization assistance models. Other examples of random path planning of anchors are Random Direction (RD) and Reference Point Group Mobility (RPGM) [51]. The authors in [52] proposed a Cosine Rule-Based Localization (CRL) algorithm with a mobile anchor node that moves in static trajectories. Instead of using the trilateration method [32] to localize sensor nodes, the authors in [52] use the cosine rule on received anchor positions and distances obtained from RSSI. The authors conducted simulations to prove the performance in terms of localization accuracy of their proposed approach in comparison with other works based on the trilateration technique. The performance of the proposed algorithm is also verified, although environmental conditions such as noise influences and the presence of obstacles are not considered.
The authors in [53] presented a survey on localization algorithms for mobile wireless sensor networks. The paper focused mainly on the mobile properties of the nodes, with an emphasis on uncontrollable mobility.
The authors in [54] proposed a localization algorithm with a single moving anchor node. The moving anchor node followed the Hilbert trajectory. The proposed algorithm used Particle Swarm Optimization (PSO) and H-Best Particle Swarm Optimization (HPSO).
The authors in [55] presented a review of the most well-known localization methods used to minimize the localization error in WSNs. This paper gives a novel taxonomy of the different methods applied to solve localization issues in WSNs, including the mobility of anchor nodes, the techniques of machine learning, some mathematical models, and meta-heuristics.
Ghorpade et al. emphasized in [56] the importance of localization accuracy in WSNs, as well as its several challenges. These challenges are dependent on the movement of the sensor nodes in the network (static or mobile), how they are located in the sensing field (random or planned deployment), and the environmental conditions, such as the presence of obstacles and so on. Moreover, the effectiveness of localization techniques is greatly dependent on the different scenarios and environmental conditions where nodes are deployed.
3. Background: The Bounding Box Method (Min–Max Method)
In a range-free WSN case, the bounding box or the Min–Max process consists of constructing the Monte Carlo Box (MCB) with a k-hops range. The bounding box algorithm proposed uses squares to estimate the possible locations of a node. Figure 2 presents an example of the bounding box technique used in our algorithm.
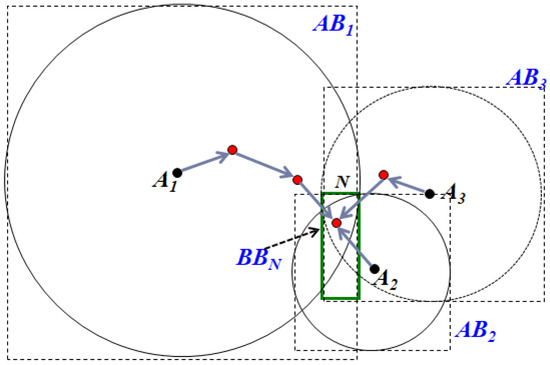
Figure 2.
Bounding box localization method.
As in the example shown in Figure 2, node N is an unknown node that has three connected anchors, A1, A2, and A3. The coordinates of anchor are , k = 1, 2, 3. In order to border the initial search space of sensor node N, we utilize square forms with side length 2 × h × R (R is the communication range and h presents the hop count between anchors and unknown sensor node N) and with coordinates and . Anchors , , and are positioned in the center of each square. Then, the obtained overlapping space of the considered squares given in Figure 3 presents the search space of node N.
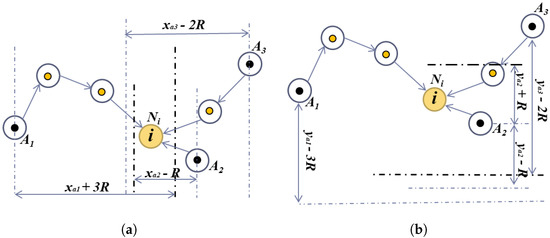
Figure 3.
Bounding box method: search space of unknown node. (a) coordinates of possible zone of node i. (b) coordinates of possible zone of node i.
The possible zone of node i is .
We note that every unknown node N has its unique search space calculated by anchors positioned within its transmission range. The bounding box determines the search space of the unknown node, which aims to minimize the computational time and complexity compared with the trilateration method.
4. Proposed Kalman Filter-Based Bounding Box Localization Algorithm (KF-BBLA)
4.1. Proposed Bounding Box Localization Technique
We consider a wireless sensor network consisting of N unknown nodes and one mobile anchor node, randomly deployed in the sensing area. We assume that the anchor node is mobile via a robot (Figure 1). At each instance t, when moving within the network, the anchor node forwards a packet to neighboring nodes, informing them about its actual location k: . The communication radio of each node is equal to R, and all sensor nodes are connected with k-hop distance. The proposed algorithm begins with a flooding phase: as with the algorithm in [30], the minimum hop count between all nodes is estimated and then the network connectivity is computed. During the flooding step, the mobile anchor node forwards its position, its ID, and the current cumulative minimum hop counts representing the intermediate nodes of the shortest multi-hop path recorded in a vector. After this phase, all the unknown nodes can be made aware of the anchor information for all of its movement within the network.
Then, the bounding box searches the possible zone where the unknown node can be located. The bounding box method or Max–Min algorithm exploits rectangle forms as an alternative to the circles used in the original DV-Hop (trilateration method). The rectangle called the bounding box limits the possible zone of a node location. In Figure 2, we distinguish between anchor boxes and bounding box . For each anchor node , an anchor box is defined as a rectangle with its center at the position of the anchor node , with sides of size , where represents the hop count between anchor node k and unknown node N. The coordinates of the anchor box are and . The bounding box defines the intersection of all anchor boxes and can be easily calculated via the Max–Min algorithm for all boxes . The final position of the unknown node is then computed as the centroid of the resulting bounding box .
For each anchor node , we define the box range as follows: .
For all anchor nodes M, the bounding box delimiting the expected zone that defines the location of the unknown node is defined as follows:
Then, the measured location of the unknown node N is given by the Centroid Bounding Box :
and .
4.2. Proposed Kalman Filter Localization Technique
Most popular in control systems, the discrete Kalman filter estimates recursively the state of a dynamic system modeled by a discrete-time state equation. The Kalman filter gives an iterative estimation algorithm that utilizes a set of measurements observed during time variation. The series of measurements includes different inaccuracies, such as statistical noise. Then, the filter gives estimations of unknown variables that tend to have more accuracy than those based on a single measure. In fact, over time, at each position of the anchor node, the Kalman filter refines the node position estimated by the mobile bounding box localization algorithm according to the measured coordinate of the unknown node and the perceived noise covariance.
The state variables at anchor position are represented as . The discrete Kalman filter estimates recursively the position of the unknown node by the discrete-time state equation:
where is the estimated node position when the anchor is at the position k. The process noise vector considers the perturbations on the unknown node position and is presented by a vector of random noise normally distributed with zero mean and covariance matrix . In our case, we consider that the position of the unknown node is fixed and unchanged during the localization process, so the value of is equal to zero. The transition matrix = identity matrix.
The following measurement equation presents the system of observation.
where is the measurement vector given by the mobile bounding box process when the anchor is at the position k, H is the observation matrix with identity matrix, which estimates the measurements at the anchors’ positions , and is the observation noise vector, assumed as a vector of random variables normally distributed with zero mean and covariance matrix R. The choice of covariance matrix of noise depends on the stability of the unknown node during the localization phase. During our simulations, we choose to use a random variable with a normal distribution of zero mean and standard deviation of 0.1. For the choice of the covariance matrix R, as in the measurement noise, which depends on electromagnetic pollution and obstacles related to the environment (irregularity of the communication), we choose to use a noise that corresponds at most to a hop between two nodes, which corresponds to a distance of 30 m.
Given both models (prediction equation and update equation), the Kalman filter algorithm iteratively tracks the state evolution as in Figure 4.
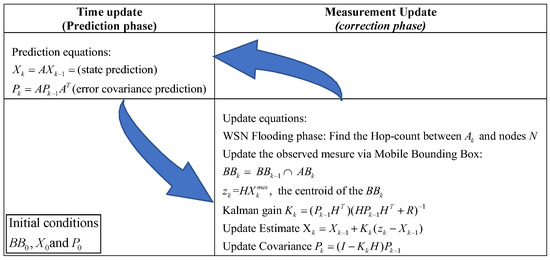
Figure 4.
Proposed localization algorithm.
5. Simulation Results
For all experiments, we supposed that a set of sensor nodes was randomly and uniformly deployed in a 100 m × 100 m sensing area where there were no obstacles. We assumed that all of the sensor nodes were static and their locations would not be changed. A mobile anchor node is arranged to process the localization of unknown nodes and is aware of its location at any point in the network. We suppose that the anchor node has a random speed and direction through the network, by the RWP model.
5.1. Variation of Localization Performance over Time
In the case of WSNs with a mobile anchor node, the position of a sensor node at any time slot is random and uncertain. These issues may cause error accumulation and position deviation [40].
As a first experiment, we aim to evaluate the performance of the proposed algorithm (KF-BBLA) by showing the localization error variation over time with a different number of nodes. Simulation results are depicted in Figure 5. We repeated the simulation 50 times and each value presents the average value of the repeated simulation. Simulation parameters are presented in Table 1. The covariance matrix Q is assumed as a positive matrix as the unknown nodes are assumed to be stable and the anchor displacement covariance matrix is assumed to be 0.1 m.
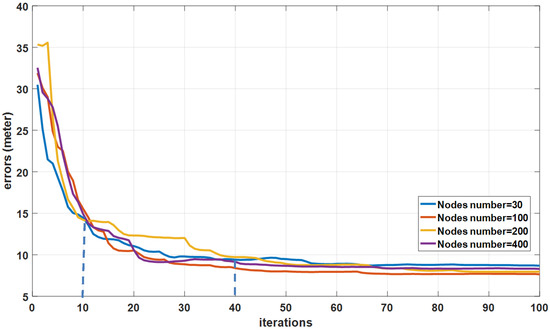
Figure 5.
Convergence analysis.

Table 1.
Simulation parameters.
Figure 5 presents the average localization error of all unknown nodes during a period of 100 time slots (iterations). As seen in Figure 5, the errors decrease and tend to be stable during this time. This statement proves that our localization technique performs better over time. This performance can be explained by the use of the Kalman filter in position correction, which uses a series of measurements observed over time, containing statistical noise and other inaccuracies, and produces estimates of unknown variables that tend to be more accurate than those based on a single measure. One can see from Figure 5 that when varying the number of nodes, we can notice that our algorithm converges well within 100 iterations. In fact, we can also notice that we can obtain a localization error of less than 15 m (R/2) in 10 iterations and an error of less than 10 m in 40 iterations. These results can prove that the proposed algorithm is well suited for localization in the case of a single mobile anchor and for range-free WSNs.
5.2. Localization Accuracy with Node Number Variation
By the following experiment, we aim to show the impact of the variation in the total amount of sensor nodes deployed in the sensing area on the localization performance. The number of unknown nodes in this experiment is 30, 100, 200, and 400. The used parameters for simulation are summarized in Table 1. Simulation results showing the influence of node number are shown in Figure 6. In this experiment, the Cumulative Distribution Functions (CDFs) are presented to illustrate the localization accuracy of the proposed algorithm with different numbers of nodes.
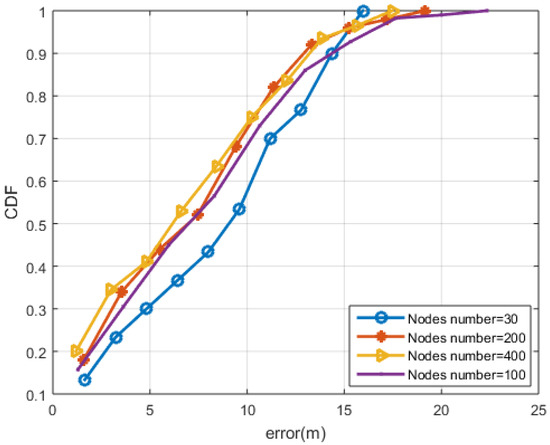
Figure 6.
CDFs of KF-BBLA with node number variation.
We notice from Figure 6 that the CDFs are highest when the amount of nodes is 400, and the CDFs are lowest when the number of nodes is 30. As the number of nodes decreases, the CDFs tend to drop. This result can be related to the high connectivity of the network, which aims to give an accurate estimation of the distance between nodes. One can see also from Figure 6 that with all different numbers of nodes, of nodes are located within its communication region, with an average error of 20 m (2R/3). For large-scale WSNs, where the number of nodes is large, multi-hop algorithms are suitable. Therefore, the high number of nodes makes the localization accuracy of the proposed algorithm better.
5.3. Comparison of Localization Accuracy of Localization Techniques
In the present section, we show some simulation results to offer a comparison of the localization accuracy performance of the proposed algorithm in this paper (KF-BBLA), PM [40], MCL [36], MCB [37], and also two localization algorithms using altered forms of Message Passing (MP) in [37,57].
The compared localization algorithms above are range-free methods and suitable for mobile and large-scale WSNs. We conduct simulations to compare their performance under the same scenario.
The localization error, depicted by the CDF, is between 0 m and 50 m. Simulation parameters are presented in Table 2 and simulation results are presented in Figure 7.
Table 2.
Simulation parameters.
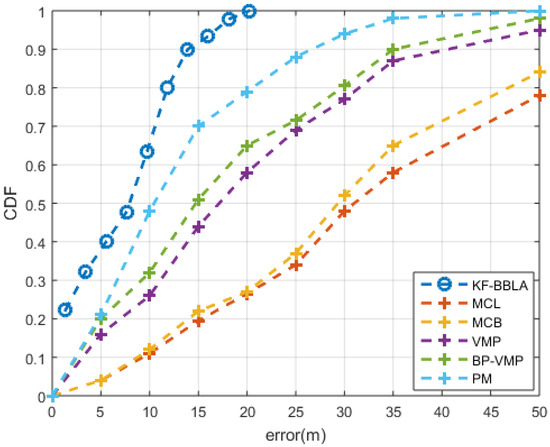
Figure 7.
Localization techniques’ accuracy.
One can see from Figure 7 that although MCL and MCB are well-known algorithms for mobile WSN localization, their localization performance must be improved as it is inferior in comparison with the other localization techniques. Moreover, we can see from Figure 7 that the accuracy of VMP and BP-VMP is improved in comparison to that of MCL and MCB. The resulting localization error of KF-BBLA is the smallest among the five compared techniques. We can explain this statement by the fact that our proposed algorithm is based on using both the bounding box method and Kalman filter to adjust the estimated position. Therefore, KF-BBLA outperforms the others in the localization accuracy. We can see also from Figure 7 that KF-BBLA gives better percentages of located unknown nodes with smaller values of localization error, when compared to other localization schemes. Furthermore, of unknown nodes are well located, with an error of less than 20 m (2R/3), and of unknown nodes are located with less than 10 m error (R/3R). However, for the PM algorithm, only of the nodes are located with an error less than 20 m and with an error less than 10 m. The following Table 3 summarizes the accuracy of our KF-BBLA algorithm and shows that it has better performance compared to other algorithms.
Table 3.
Simulation parameters.
6. Conclusions
In this paper, we proposed a novel localization algorithm based on the bounding box method (KF-BBLA) with mobile anchor nodes. The estimated position of the sensor node is then improved using the Kalman filter. Our mobile localization strategy is used to reduce the hardware costs for a sensor network and the computational effort compared to static anchors. Through simulation experiments and the cumulative distribution function (CDF), we proved that the proposed localization algorithm outperforms the compared localization algorithms from the literature in terms of localization accuracy by up to .
In this proposed technique, we used a mobile anchor that moves randomly within the network. However, many recent works use a mobile anchor based on a planned path to achieve better localization accuracy for WSNs. Moreover, the proposed method does not take into consideration the problem of the straight line path of the mobile anchor. This issue may affect the bounding box localization accuracy and increase the error of localization. As future work, we aim to address the problem of path planning of the mobile anchor to achieve the best accuracy, with reduced localization time.
Author Contributions
Conceptualization, H.L. and S.M.; methodology, S.M.; validation, O.C., A.K. and M.H.; formal analysis, O.C.; investigation, O.C.; resources, O.C.; writing—original draft preparation, S.M.; writing—review and editing, O.C.; visualization, A.K.; supervision, M.H.; funding acquisition, M.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Princess Nourah bint Abdulrahman University Researchers Supporting Project number (PNURSP2022R125), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia.
Acknowledgments
The authors would like to acknowledge the support of Prince Sultan University for paying the Article Processing Charges (APC) of this publication.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Muzammal, M.; Talat, R.; Sodhro, A.H.; Pirbhulal, S. A multi-sensor data fusion enabled ensemble approach for medical data from body sensor networks. Inf. Fusion 2020, 53, 155–164. [Google Scholar]
- Atiga, J.; Hamdi, M.; Ejbali, R.; Zaied, M. Recurrent neural network NARX for distributed fault detection in wireless sensor networks. Int. J. Sens. Netw. 2021, 37, 100–111. [Google Scholar] [CrossRef]
- Alomari, A.; Comeau, F.; Phillips, W.; Aslam, N. New path planning model for mobile anchor-assisted localization in wireless sensor networks. Wirel. Netw. 2018, 24, 2589–2607. [Google Scholar]
- Hajjej, F.; Hamdi, M.; Ejbali, R.; Zaied, M. A New Optimal Deployment Model of Internet of Things Based on Wireless Sensor Networks. In Proceedings of the 2019 15th International Wireless Communications & Mobile Computing Conference (IWCMC), Tangier, Morocco, 24–28 June 2019; pp. 2092–2097. [Google Scholar] [CrossRef]
- Sodhro, A.H.; Sangaiah, A.K.; Sodhro, G.H.; Sekhari, A.; Ouzrout, Y.; Pirbhulal, S. Energy-efficiency of tools and applications on Internet. In Computational Intelligence for Multimedia Big Data on the Cloud with Engineering Applications; Elsevier: Amsterdam, The Netherlands, 2018; pp. 297–318. [Google Scholar]
- Mershad, K.; Cheikhrouhou, O.; Ismail, L. Proof of Accumulated Trust: A new consensus protocol for the security of the IoV. Veh. Commun. 2021, 32, 100392. [Google Scholar]
- Jamil, F.; Cheikhrouhou, O.; Jamil, H.; Koubaa, A.; Derhab, A.; Ferrag, M.A. PetroBlock: A blockchain-based payment mechanism for fueling smart vehicles. Appl. Sci. 2021, 11, 3055. [Google Scholar] [CrossRef]
- Cheikhrouhou, O.; Koubâa, A. Blockloc: Secure localization in the internet of things using blockchain. In Proceedings of the 2019 15th International Wireless Communications & Mobile Computing Conference (IWCMC), Tangier, Morocco, 24–28 June 2019; pp. 629–634. [Google Scholar]
- Zaabar, B.; Cheikhrouhou, O.; Ammi, M.; Awad, A.I.; Abid, M. Secure and Privacy-aware Blockchain-based Remote Patient Monitoring System for Internet of Healthcare Things. In Proceedings of the 2021 17th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Bologna, Italy, 11–13 October 2021; pp. 200–205. [Google Scholar]
- Cheikhrouhou, O. Secure group communication in wireless sensor networks: A survey. J. Netw. Comput. Appl. 2016, 61, 115–132. [Google Scholar]
- Sodhro, A.H. A review on 802.11 MAC protocols industrial standards, architecture elements for providing QoS guarantee, supporting emergency traffic, and security: Future directions. J. Ind. Inf. Integr. 2021, 4, 100225. [Google Scholar]
- Cheikhrouhou, O.; Mahmud, R.; Zouari, R.; Ibrahim, M.; Zaguia, A.; Gia, T.N. One-dimensional CNN approach for ECG arrhythmia analysis in fog-cloud environments. IEEE Access 2021, 9, 103513–103523. [Google Scholar]
- Frikha, T.; Chaari, A.; Chaabane, F.; Cheikhrouhou, O.; Zaguia, A. Healthcare and fitness data management using the iot-based blockchain platform. J. Healthc. Eng. 2021, 2021, 9978863. [Google Scholar] [CrossRef]
- Zaabar, B.; Cheikhrouhou, O.; Jamil, F.; Ammi, M.; Abid, M. HealthBlock: A secure blockchain-based healthcare data management system. Comput. Netw. 2021, 200, 108500. [Google Scholar]
- Cheikhrouhou, O.; Koubâa, A.; Zarrad, A. A cloud based disaster management system. J. Sens. Actuator Netw. 2020, 9, 6. [Google Scholar]
- Sharma, K.; Anand, D.; Sabharwal, M.; Tiwari, P.K.; Cheikhrouhou, O.; Frikha, T. A Disaster Management Framework Using Internet of Things-Based Interconnected Devices. Math. Probl. Eng. 2021, 2021, 916440. [Google Scholar]
- Han, G.; Jiang, J.; Zhang, C.; Duong, T.Q.; Guizani, M.; Karagiannidis, G.K. A survey on mobile anchor node assisted localization in wireless sensor networks. IEEE Commun. Surv. Tutorials 2016, 18, 2220–2243. [Google Scholar]
- Ullah, I.; Qian, S.; Deng, Z.; Lee, J.H. Extended Kalman Filter-based localization algorithm by edge computing in Wireless Sensor Networks. Digit. Commun. Netw. 2021, 7, 187–195. [Google Scholar]
- Messous, S.; Liouane, H.; Liouane, N. Improvement of DV-Hop localization algorithm for randomly deployed wireless sensor networks. Telecommun. Syst. 2020, 73, 75–86. [Google Scholar]
- Messous, S.; Liouane, N.; Pegatoquet, A.; Auguin, M. Hop-based routing protocol based on energy efficient Minimum Spanning Tree for wireless sensor network. In Proceedings of the 2018 International Conference on Advanced Systems and Electric Technologies (IC_ASET), Hammamet, Tunisia, 22–25 March 2018; pp. 421–426. [Google Scholar]
- Koubâa, A.; Jamâa, M.B. Taxonomy of Fundamental Concepts of Localization in Cyber-Physical and Sensor Networks. Wirel. Pers. Commun. 2013, 72, 461–507. [Google Scholar] [CrossRef]
- Liouane, H.; Messous, S.; Cheikhrouhou, O.; Baz, M.; Hamam, H. Regularized Least Square Multi-Hops Localization Algorithm for Wireless Sensor Networks. IEEE Access 2021, 9, 136406–136418. [Google Scholar]
- Girod, L.; Estrin, D. Robust range estimation using acoustic and multimodal sensing. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Expanding the Societal Role of Robotics in the the Next Millennium (Cat. No. 01CH37180), Maui, HI, USA, 29 October–3 November 2001; Volume 3, pp. 1312–1320. [Google Scholar]
- Priyantha, N.B.; Chakraborty, A.; Balakrishnan, H. The cricket location-support system. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking, Boston, MA, USA, 6–11 August 2000; pp. 32–43. [Google Scholar]
- Niculescu, D.; Nath, B. Ad hoc positioning system (APS) using AOA. In Proceedings of the IEEE INFOCOM 2003, Twenty-second Annual Joint Conference of the IEEE Computer and Communications Societies (IEEE Cat. No. 03CH37428), San Francisco, CA, USA, 30 March–03 April 2003; Volume 3, pp. 1734–1743. [Google Scholar]
- Viani, F.; Lizzi, L.; Rocca, P.; Benedetti, M.; Donelli, M.; Massa, A. Object tracking through RSSI measurements in wireless sensor networks. Electron. Lett. 2008, 44, 653–654. [Google Scholar] [CrossRef]
- Jamâa, M.B.; Koubâa, A.; Kayani, Y. EasyLoc: RSS-Based Localization Made Easy. Procedia Comput. Sci. 2012, 10, 1127–1133. [Google Scholar] [CrossRef][Green Version]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Cappelletti, C.; Battistini, S.; Malphrus, B. CubeSat Handbook: From Mission Design to Operations; Academic Press: Cambridge, MA, USA, 2020. [Google Scholar]
- Messous, S.; Liouane, H.; Cheikhrouhou, O.; Hamam, H. Improved Recursive DV-Hop Localization Algorithm with RSSI Measurement for Wireless Sensor Networks. Sensors 2021, 21, 4152. [Google Scholar] [PubMed]
- Messous, S.; Liouane, H. Online sequential DV-hop localization algorithm for wireless sensor networks. Mob. Inf. Syst. 2020, 2020, 8195309. [Google Scholar]
- Liouane, H.; Messous, S.; Cheikhrouhou, O. Regularized least square multi-hops localization algorithm based on DV-Hop for wireless sensor networks. Telecommun. Syst. 2022, 80, 349–358. [Google Scholar] [CrossRef]
- Campos, A.N.; Souza, E.L.; Nakamura, F.G.; Nakamura, E.F.; Rodrigues, J.J. On the impact of localization and density control algorithms in target tracking applications for wireless sensor networks. Sensors 2012, 12, 6930–6952. [Google Scholar] [PubMed]
- Han, G.; Zhang, C.; Jiang, J.; Yang, X.; Guizani, M. Mobile anchor nodes path planning algorithms using network-density-based clustering in wireless sensor networks. J. Netw. Comput. Appl. 2017, 85, 64–75. [Google Scholar]
- Johnson, D.B.; Maltz, D.A. Dynamic source routing in ad hoc wireless networks. In Mobile computing; Springer: Berlin/Heidelberg, Germany, 1996; pp. 153–181. [Google Scholar]
- Hu, L.; Evans, D. Localization for mobile sensor networks. In Proceedings of the 10th annual international conference on Mobile computing and networking, Philadelphia, PA, USA, 26 September–1 October 2004; pp. 45–57. [Google Scholar]
- Baggio, A.; Langendoen, K. Monte Carlo localization for mobile wireless sensor networks. Ad Hoc Netw. 2008, 6, 718–733. [Google Scholar] [CrossRef]
- Correia, S.D.; Beko, M.; da Silva Cruz, L.A.; Tomic, S. Elephant herding optimization for energy-based localization. Sensors 2018, 18, 2849. [Google Scholar]
- Wang, W.; Zhu, Q. RSS-based Monte Carlo localisation for mobile sensor networks. IET Commun. 2008, 2, 673–681. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, B.; Wang, X.; Chai, S.; Bai, Y. Cooperative Localization With Bounding Constraints in Mobile Wireless Sensor Networks. IEEE Access 2018, 6, 47011–47025. [Google Scholar] [CrossRef]
- Hu, Z.; Gu, D.; Song, Z.; Li, H. Localization in wireless sensor networks using a mobile anchor node. In Proceedings of the 2008 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Xi’an, China, 2–5 July 2008; pp. 602–607. [Google Scholar]
- Han, G.; Xu, H.; Jiang, J.; Shu, L.; Hara, T.; Nishio, S. Path planning using a mobile anchor node based on trilateration in wireless sensor networks. Wirel. Commun. Mob. Comput. 2013, 13, 1324–1336. [Google Scholar] [CrossRef]
- Han, G.; Zhang, C.; Lloret, J.; Shu, L.; Rodrigues, J.J. A mobile anchor assisted localization algorithm based on regular hexagon in wireless sensor networks. Sci. World J. 2014, 2014, 219371. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Yang, Z.; Zhang, S.; Yang, H. Three-dimensional localization algorithm of WSN nodes based on RSSI-TOA and single mobile anchor node. J. Electr. Comput. Eng. 2019, 2019, 4043106. [Google Scholar] [CrossRef]
- Hamdi, M.; Mhiri, S. Dynamic mesh router placement for connectivity maximization in wireless mesh networks. In Proceedings of the 2015 5th International Conference on Information & Communication Technology and Accessibility (ICTA), Marrakech, Morocco, 21–23 December 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Ullah, I.; Shen, Y.; Su, X.; Esposito, C.; Choi, C. A localization based on unscented Kalman filter and particle filter localization algorithms. IEEE Access 2019, 8, 2233–2246. [Google Scholar] [CrossRef]
- Silmi, S.; Doukha, Z.; Moussaoui, S. A self-localization range free protocol for wireless sensor networks. Peer-Netw. Appl. 2021, 14, 2061–2071. [Google Scholar] [CrossRef]
- Meng, Y.; Zhi, Q.; Dong, M.; Zhang, W. A Node Localization Algorithm for Wireless Sensor Networks Based on Virtual Partition and Distance Correction. Information 2021, 12, 330. [Google Scholar] [CrossRef]
- Boukhari, N.; Bouamama, S.; Moussaoui, A. Path Parameters Effect on Localization Using a Mobile Anchor in WSN. Int. J. Inform. Appl. Math. 2020, 3, 12–22. [Google Scholar]
- Rezazadeh, J.; Moradi, M.; Ismail, A.S.; Dutkiewicz, E. Impact of static trajectories on localization in wireless sensor networks. Wirel. Netw. 2015, 21, 809–827. [Google Scholar] [CrossRef]
- Han, G.; Chao, J.; Zhang, C.; Shu, L.; Li, Q. The impacts of mobility models on DV-hop based localization in mobile wireless sensor networks. J. Netw. Comput. Appl. 2014, 42, 70–79. [Google Scholar] [CrossRef]
- Sabale, K.; Mini, S. Localization in wireless sensor networks with mobile anchor node path planning mechanism. Inf. Sci. 2021, 579, 648–666. [Google Scholar] [CrossRef]
- de Oliveira, L.L.; Eisenkraemer, G.H.; Carara, E.A.; Martins, J.B.; Monteiro, J. Mobile Localization Techniques for Wireless Sensor Networks: Survey and Recommendations. ACM Trans. Sens. Netw. (TOSN) 2022. [Google Scholar] [CrossRef]
- Singh, P.; Khosla, A.; Kumar, A.; Khosla, M. Optimized localization of target nodes using single mobile anchor node in wireless sensor network. AEU-Int. J. Electron. Commun. 2018, 91, 55–65. [Google Scholar] [CrossRef]
- Lalama, Z.; Boulfekhar, S.; Semechedine, F. Localization Optimization in WSNs Using Meta-Heuristics Optimization Algorithms: A Survey. Wirel. Pers. Commun. 2022, 122, 1197–1220. [Google Scholar] [CrossRef]
- Ghorpade, S.; Zennaro, M.; Chaudhari, B. Survey of localization for internet of things nodes: Approaches, challenges and open issues. Future Internet 2021, 13, 210. [Google Scholar] [CrossRef]
- Yi, J.; Yang, S.; Cha, H. Multi-hop-based monte carlo localization for mobile sensor networks. In Proceedings of the 2007 4th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks, San Diego, CA, USA, 18–21 June 2007; pp. 162–171. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).