
Modeling and Analysis of Non-Linear Phenomena of Satellite Power System in Space Environment and Hazard-Risk Evaluations


Abstract
:1. Introduction
- We find the weak links of the satellite power system by modeling and analyzing non-linear phenomena influenced by the space environment factors;
- Through the hazard risk evaluations of the above non-linear phenomena, we find the law of the negative impact of the space environment on the satellite power system.
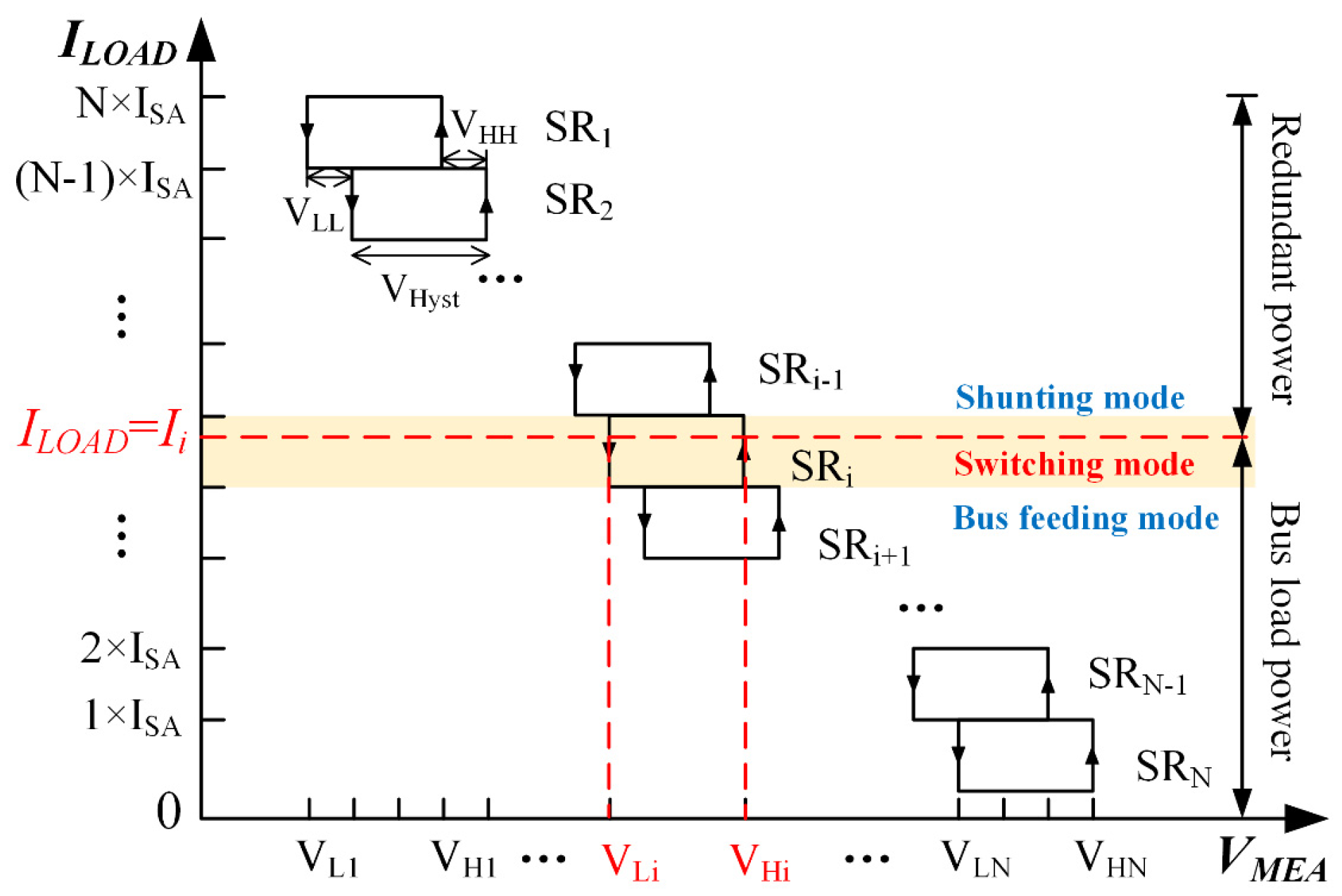
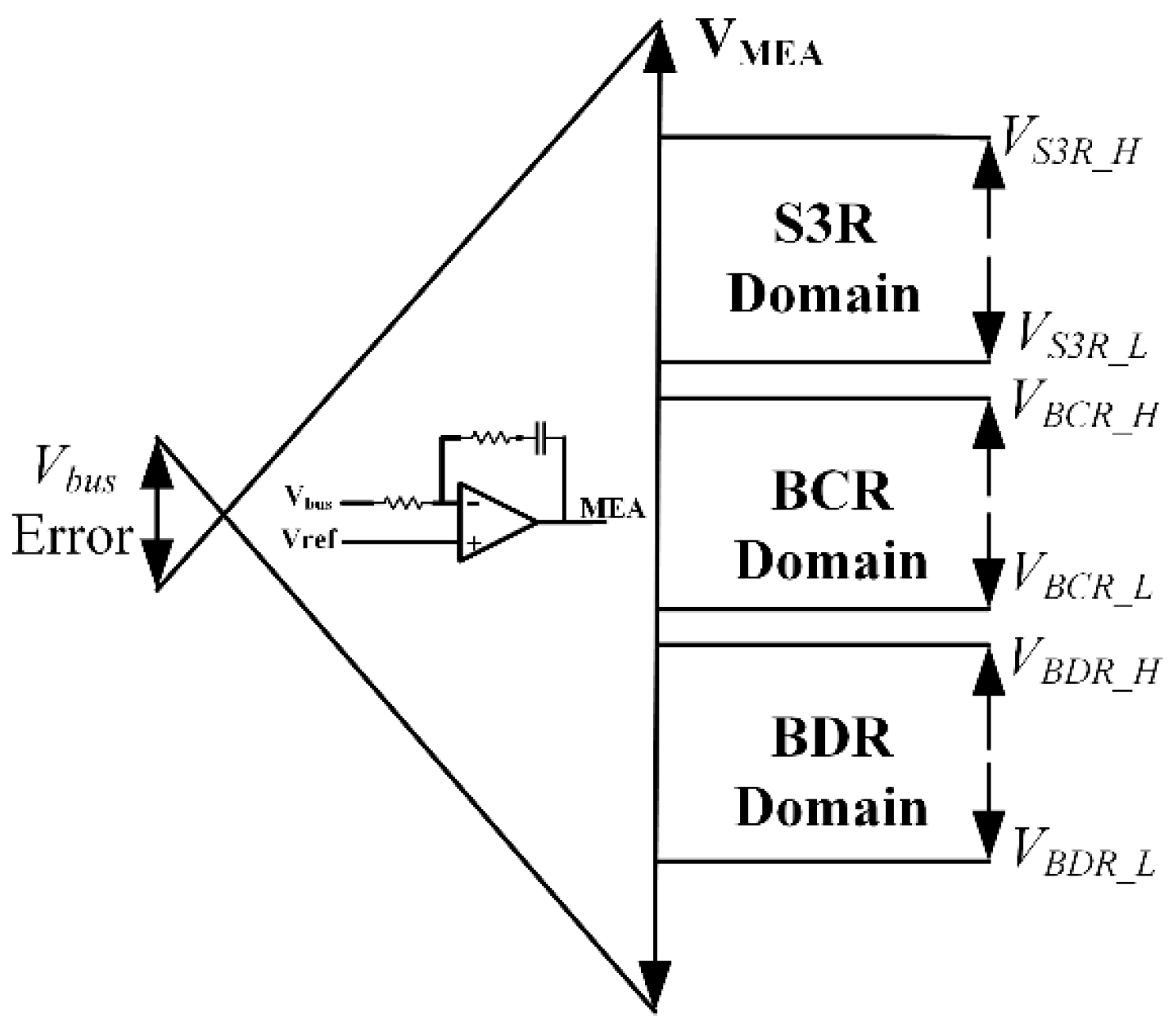
2. Operation Principle of PCU
3. Unexpected Energy of Solar Array and Hazard–Risk Evaluations
3.1. Modeling of Non-Linear Phenomena of Solar Array
3.2. Hazard–Risk Evaluations
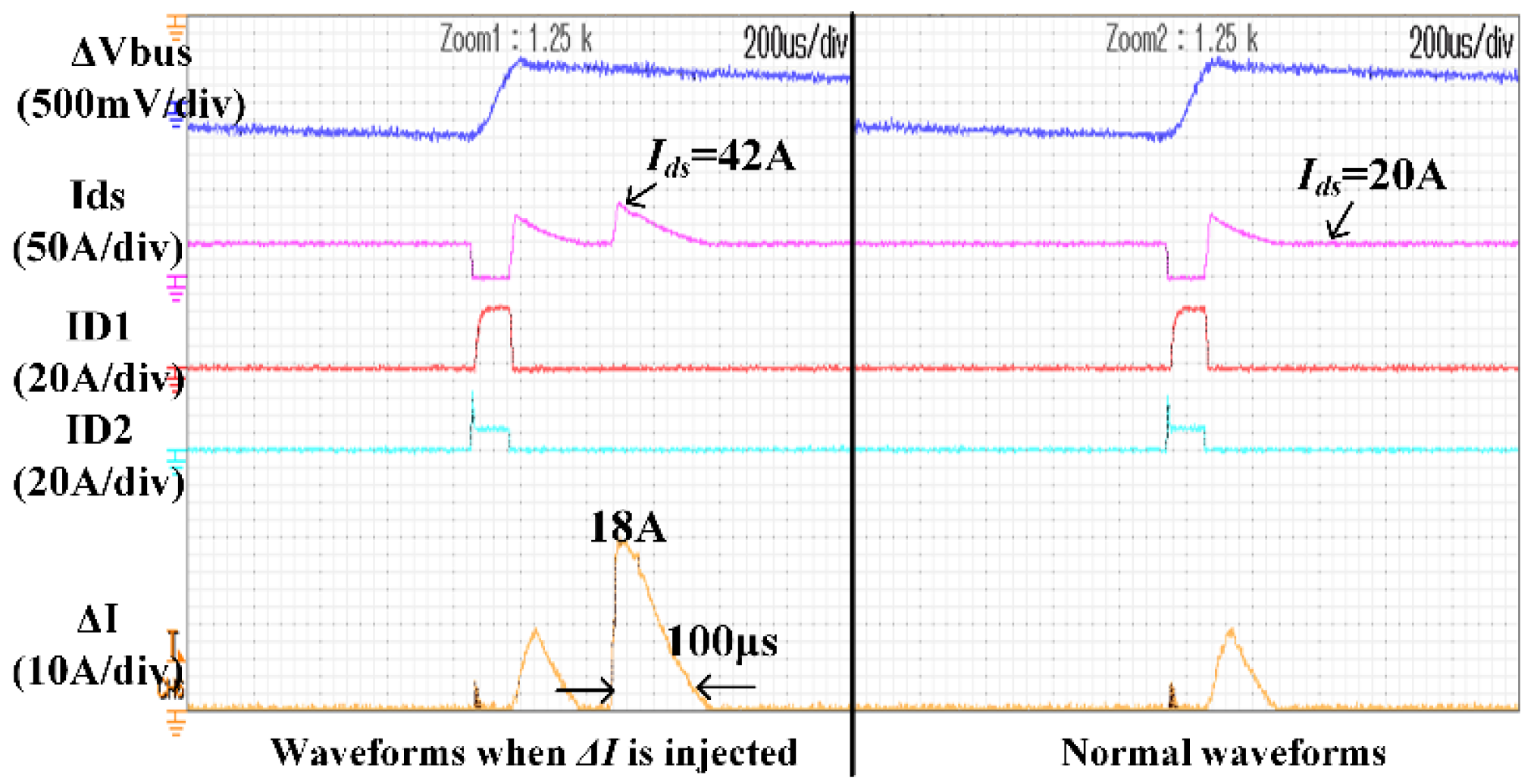
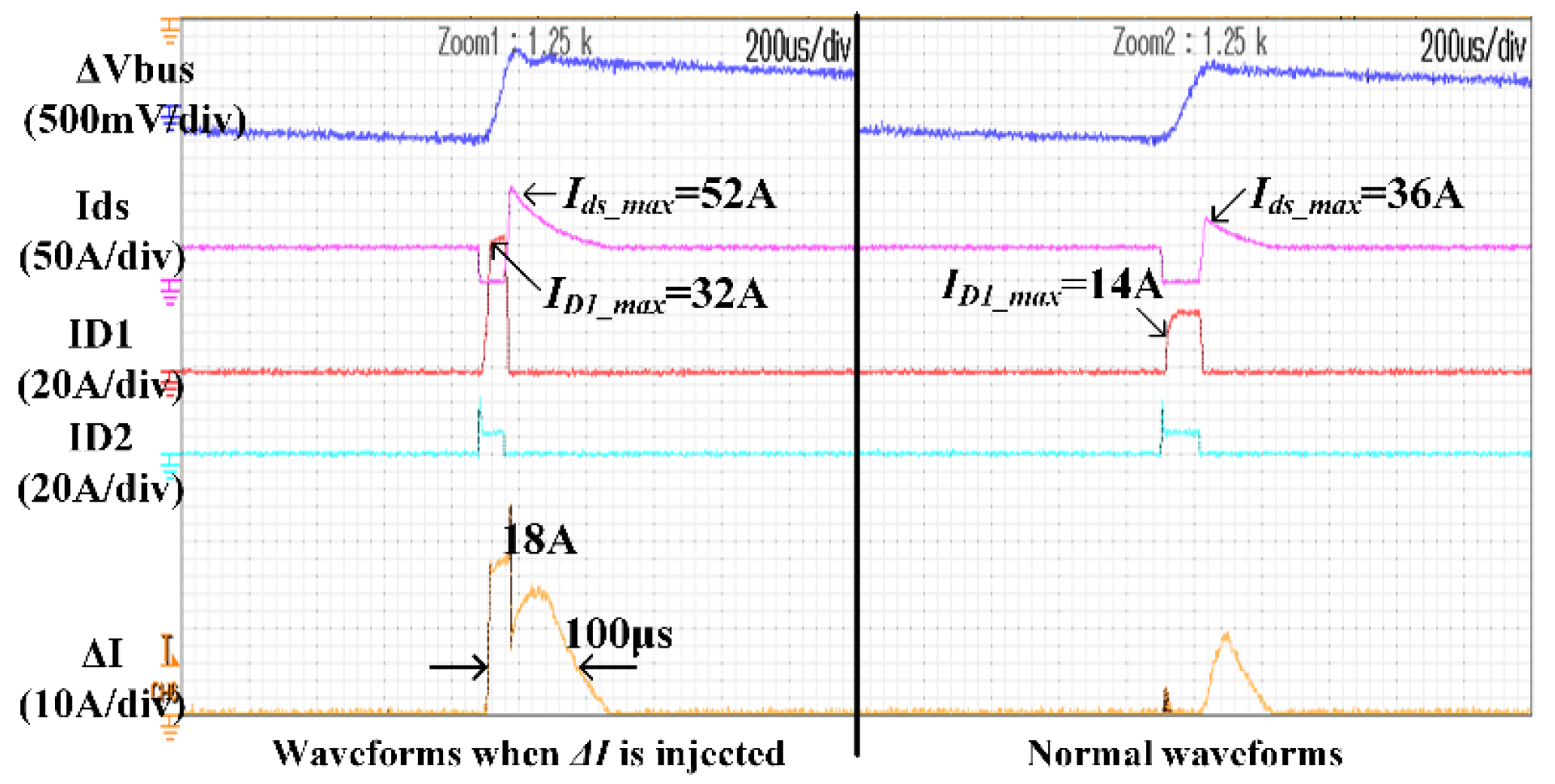
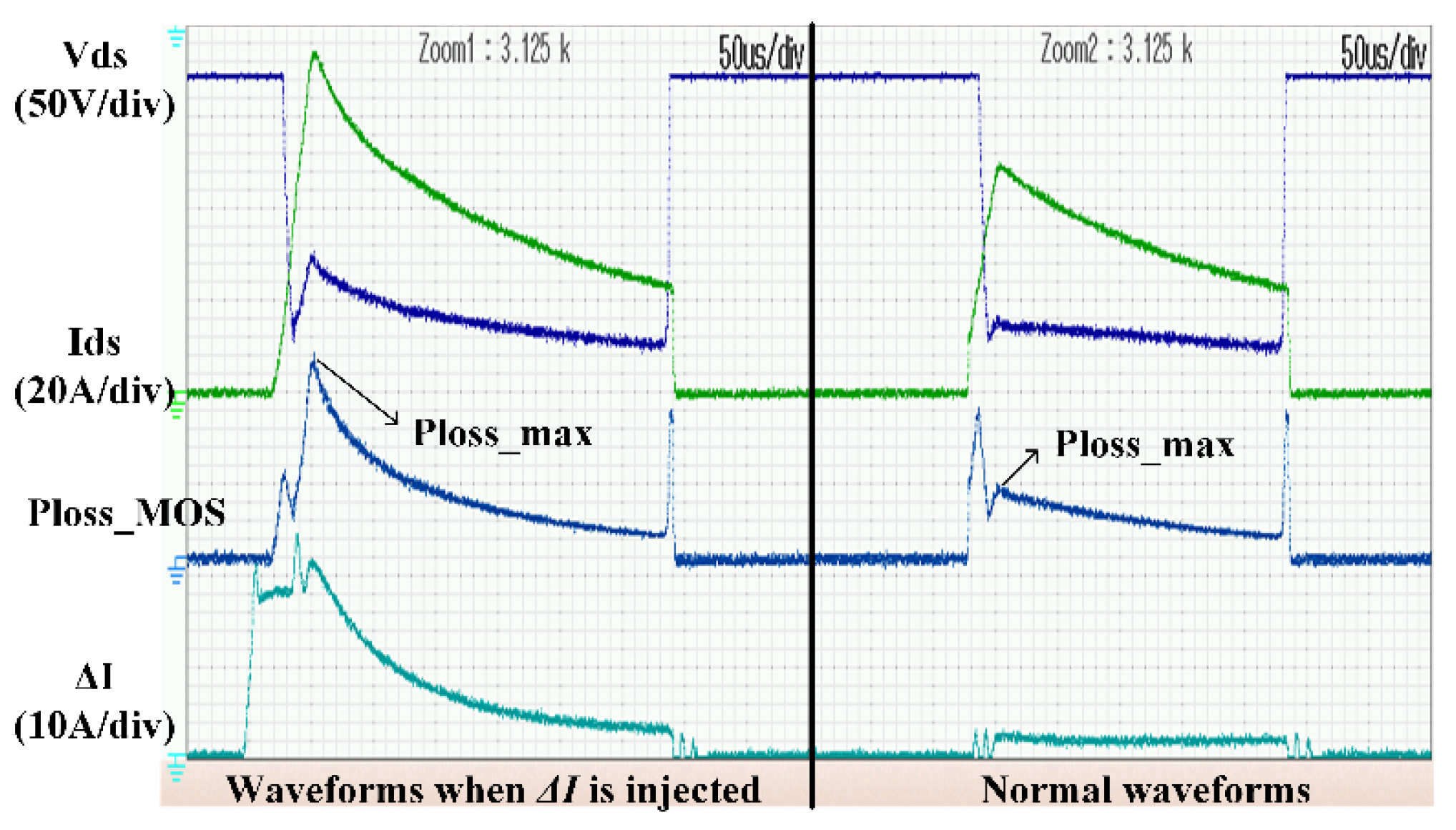
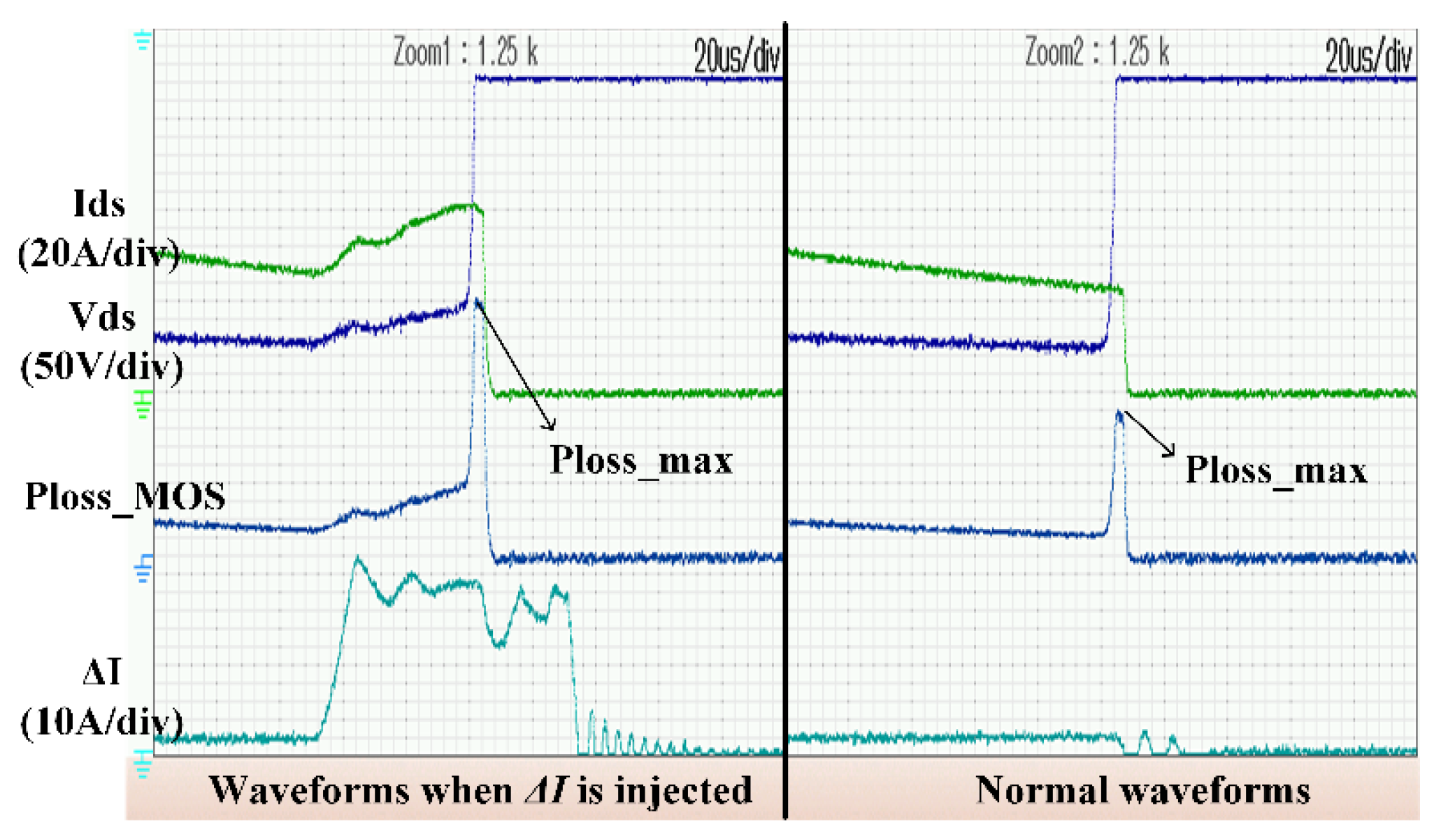
3.2.1. Current Stress and Power Loss of Power Devices
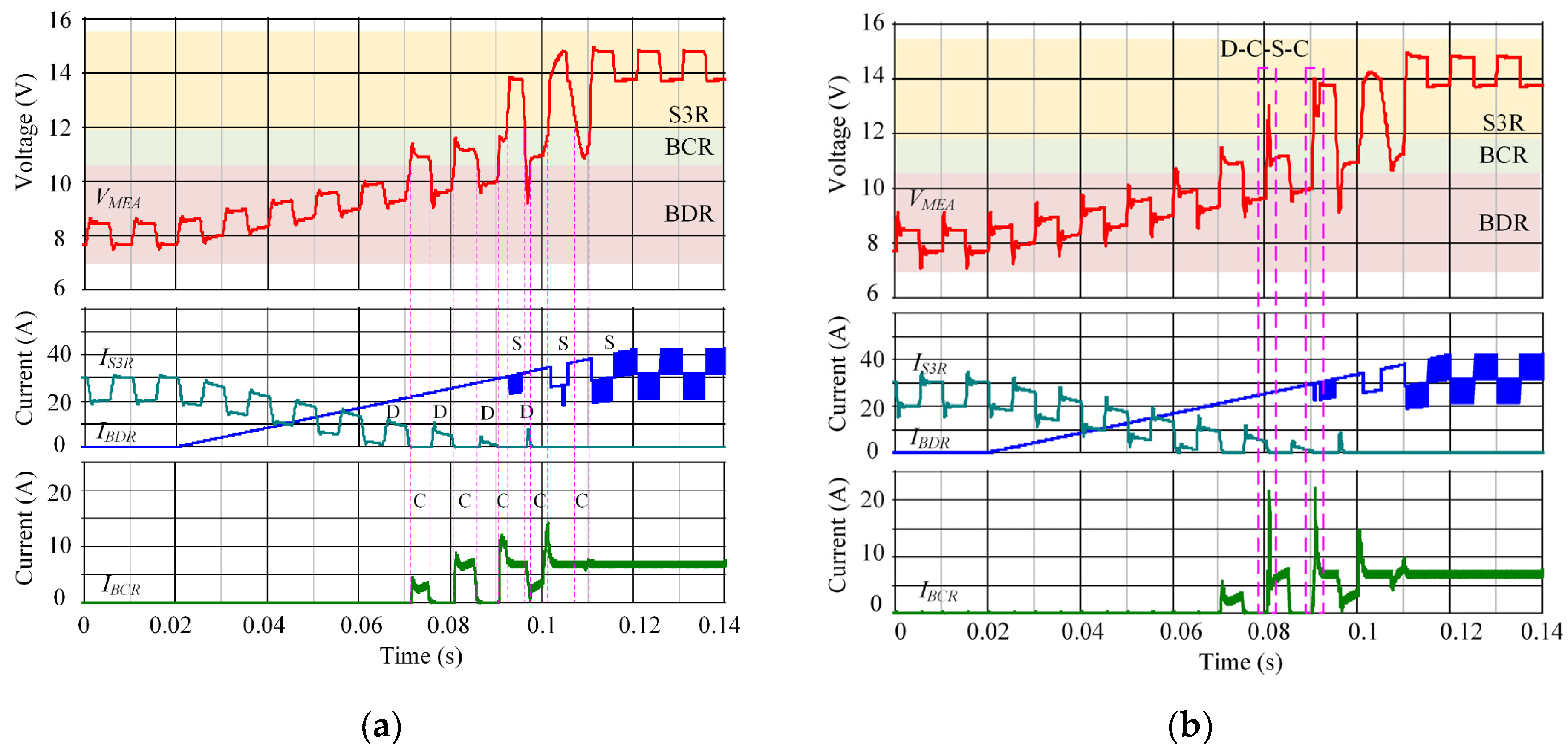
3.2.2. Over-Regulation of the S3R and Quality of the Bus Voltage
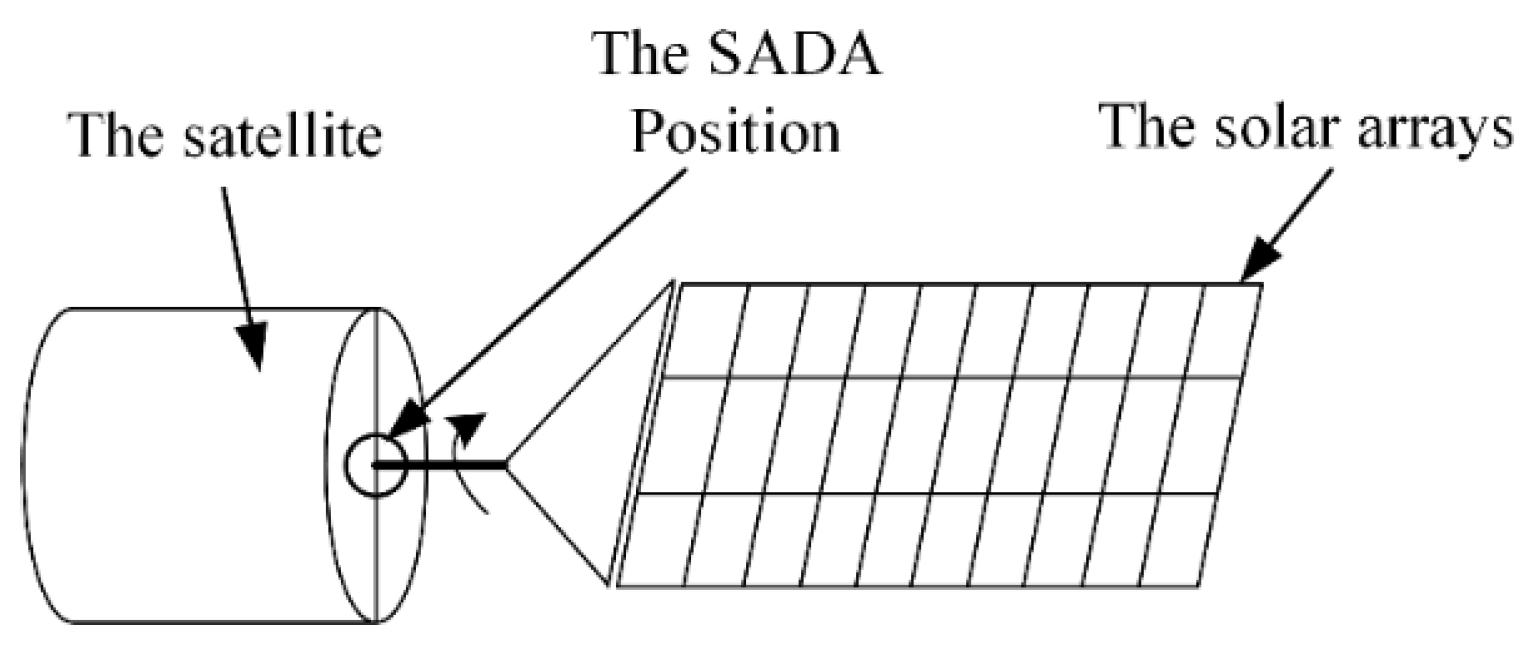
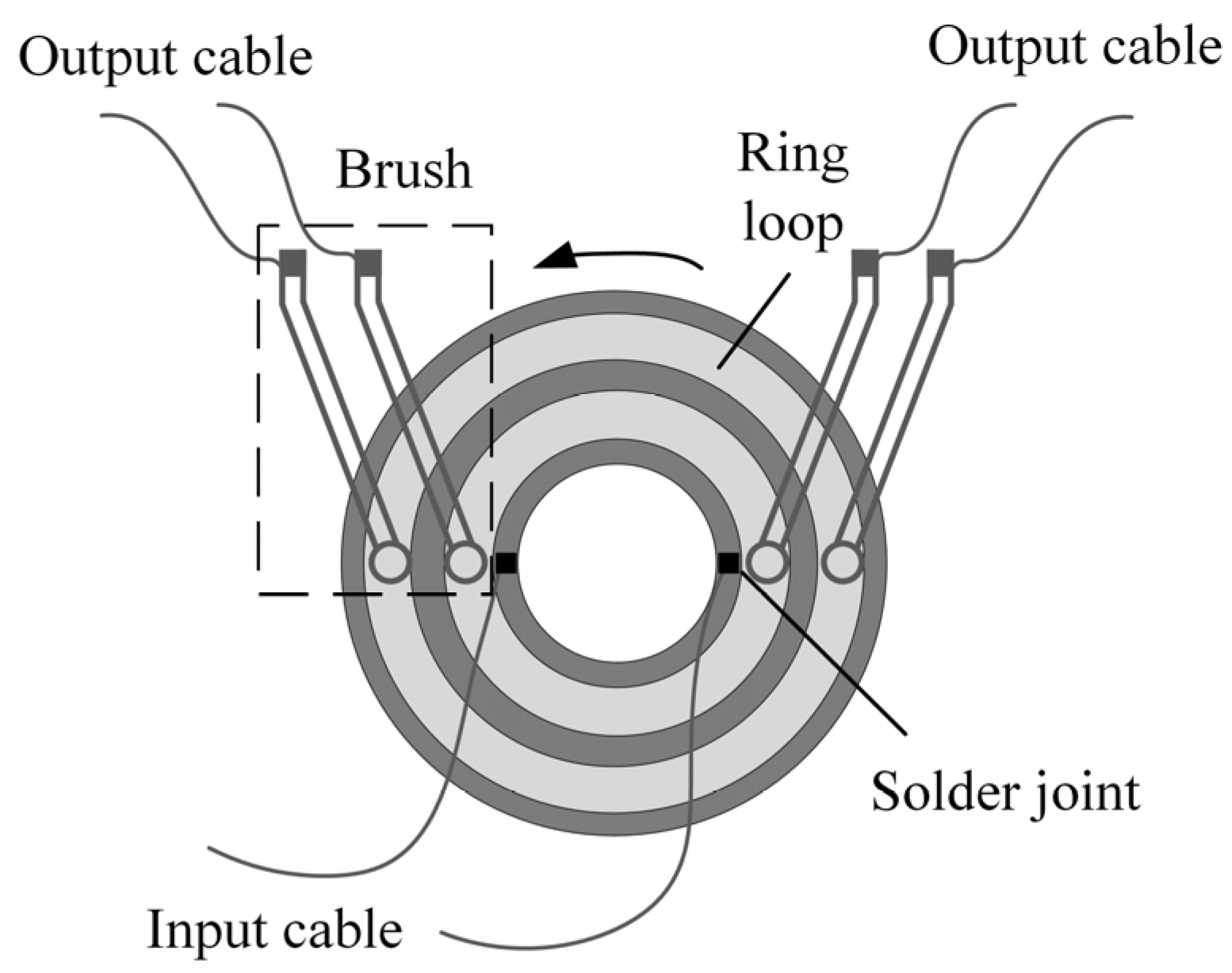
4. Arc Fault of SADA Slip Ring and Hazard–Risk Evaluations
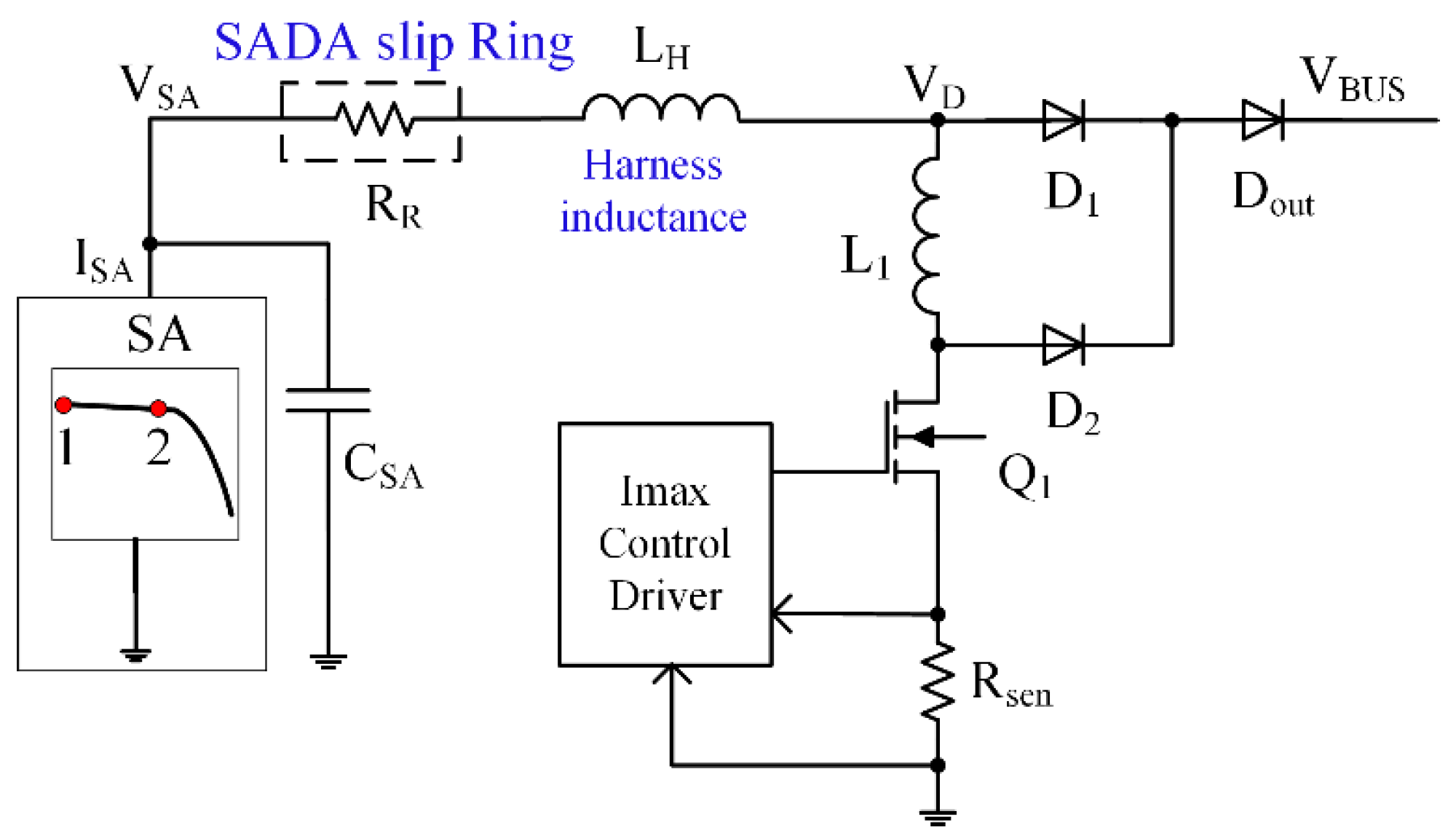
4.1. Modeling of Arc Fault of SADA Slip Ring
4.2. Hazard–Risk Evaluations
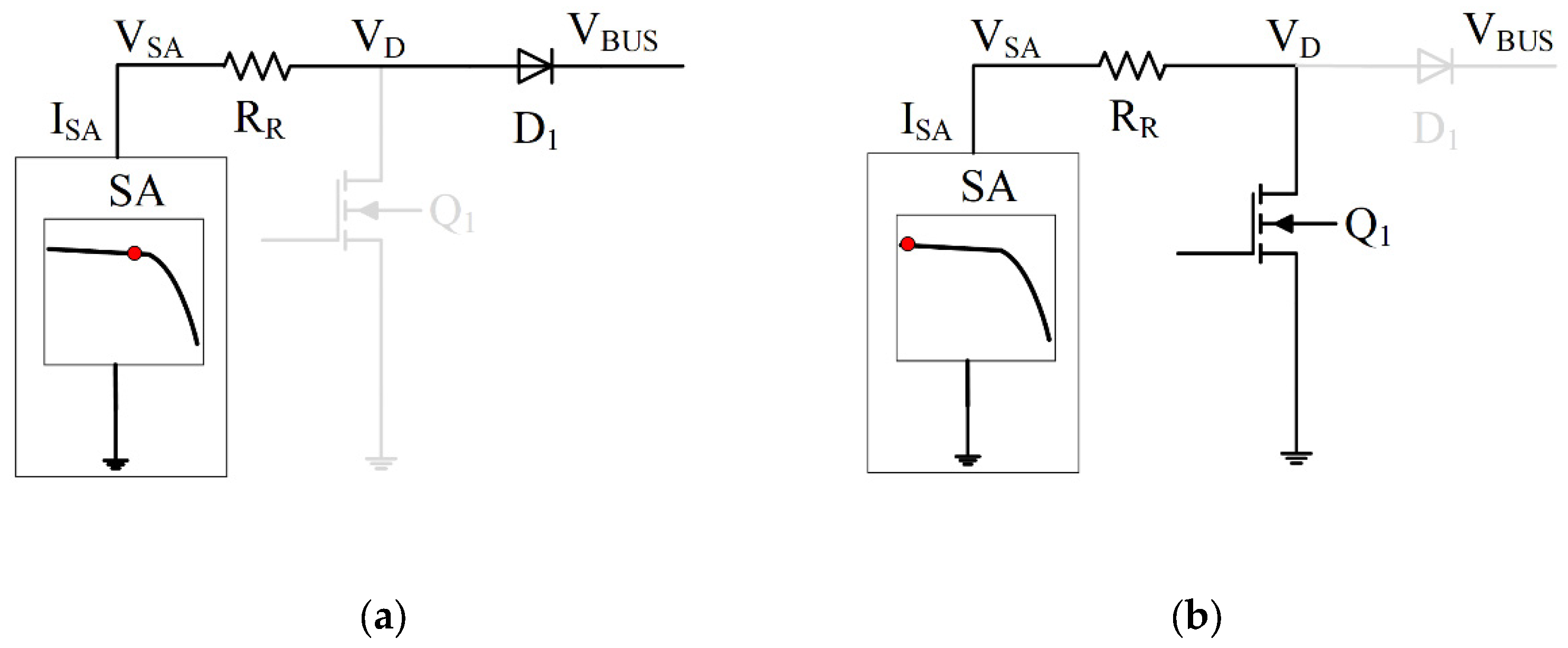
4.2.1. Influence on Working Point of Solar Array
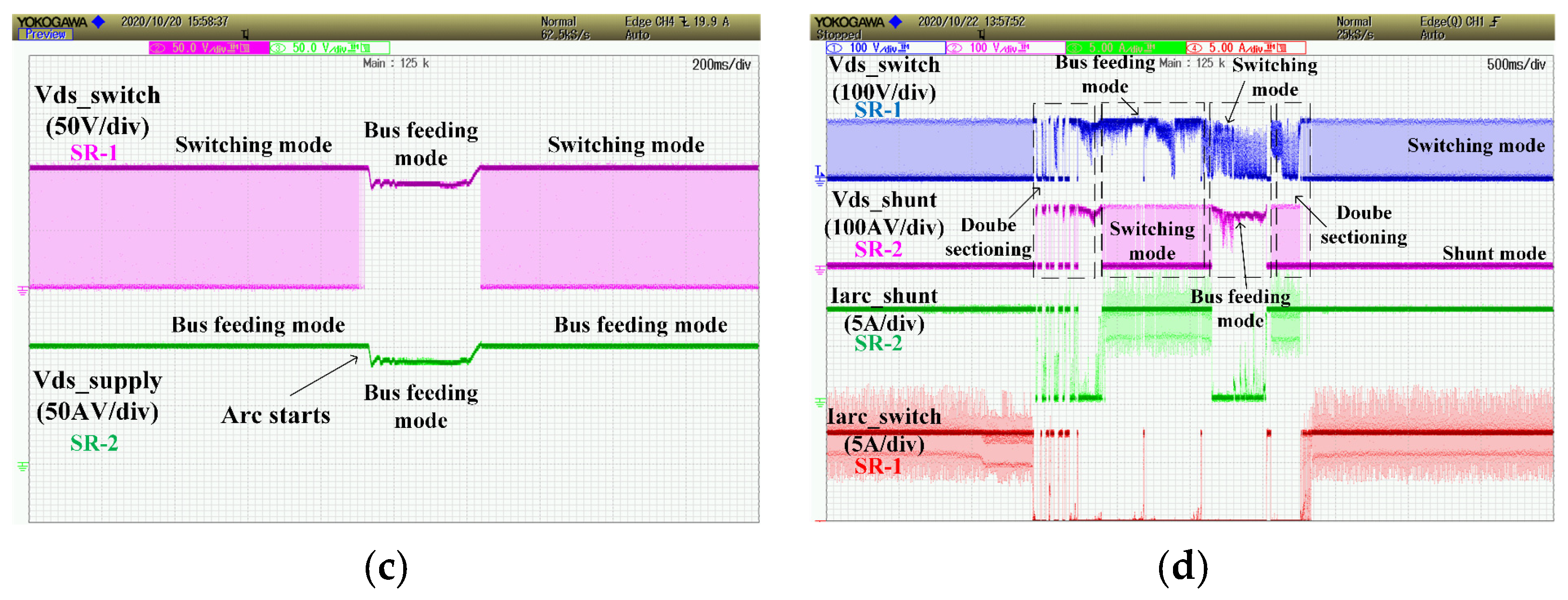
4.2.2. Influence on Stability of the SR and Security of the Power System
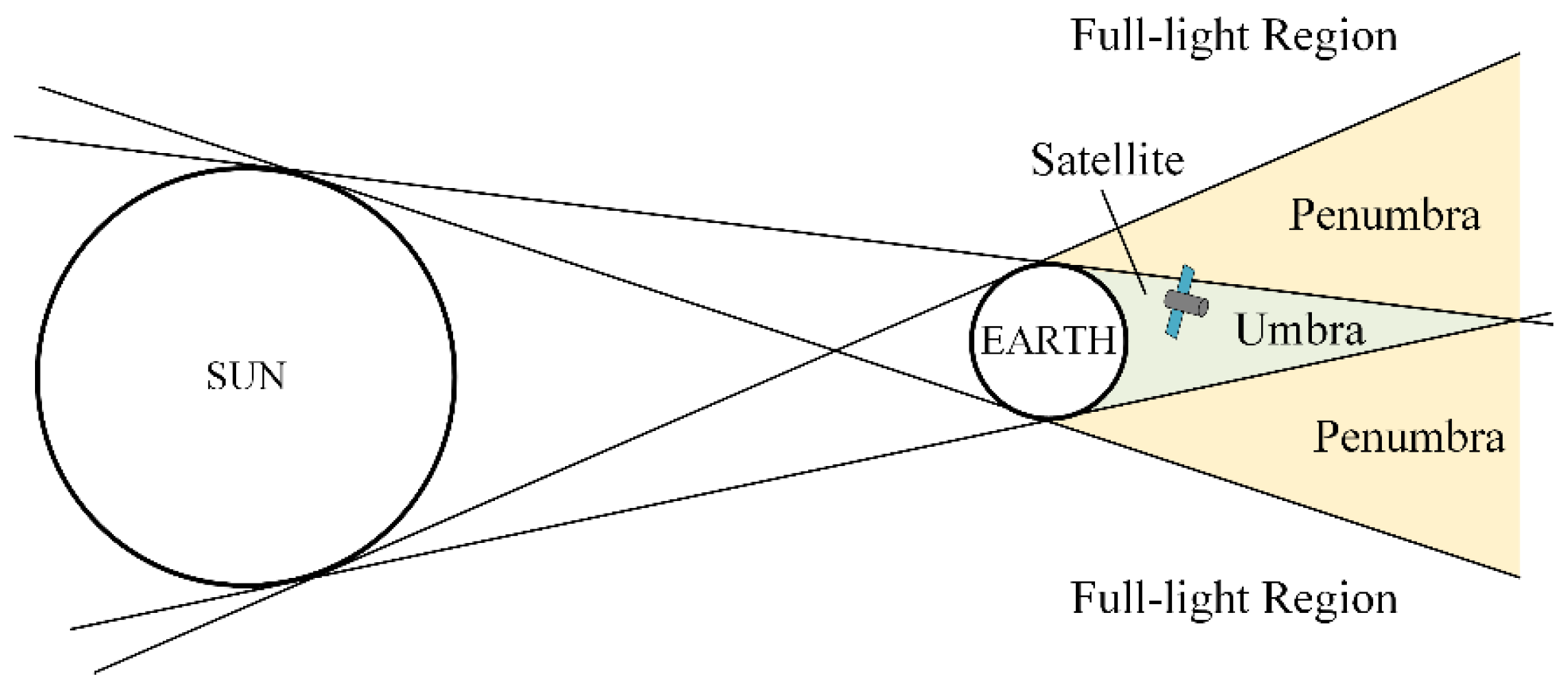
5. Analysis of Non-Linear Phenomena of Solar Array and Load during the Earth Eclipse
5.1. Modeling of Non-Linear Phenomena of Solar Array and Load during Satellite Exiting the Eclipse
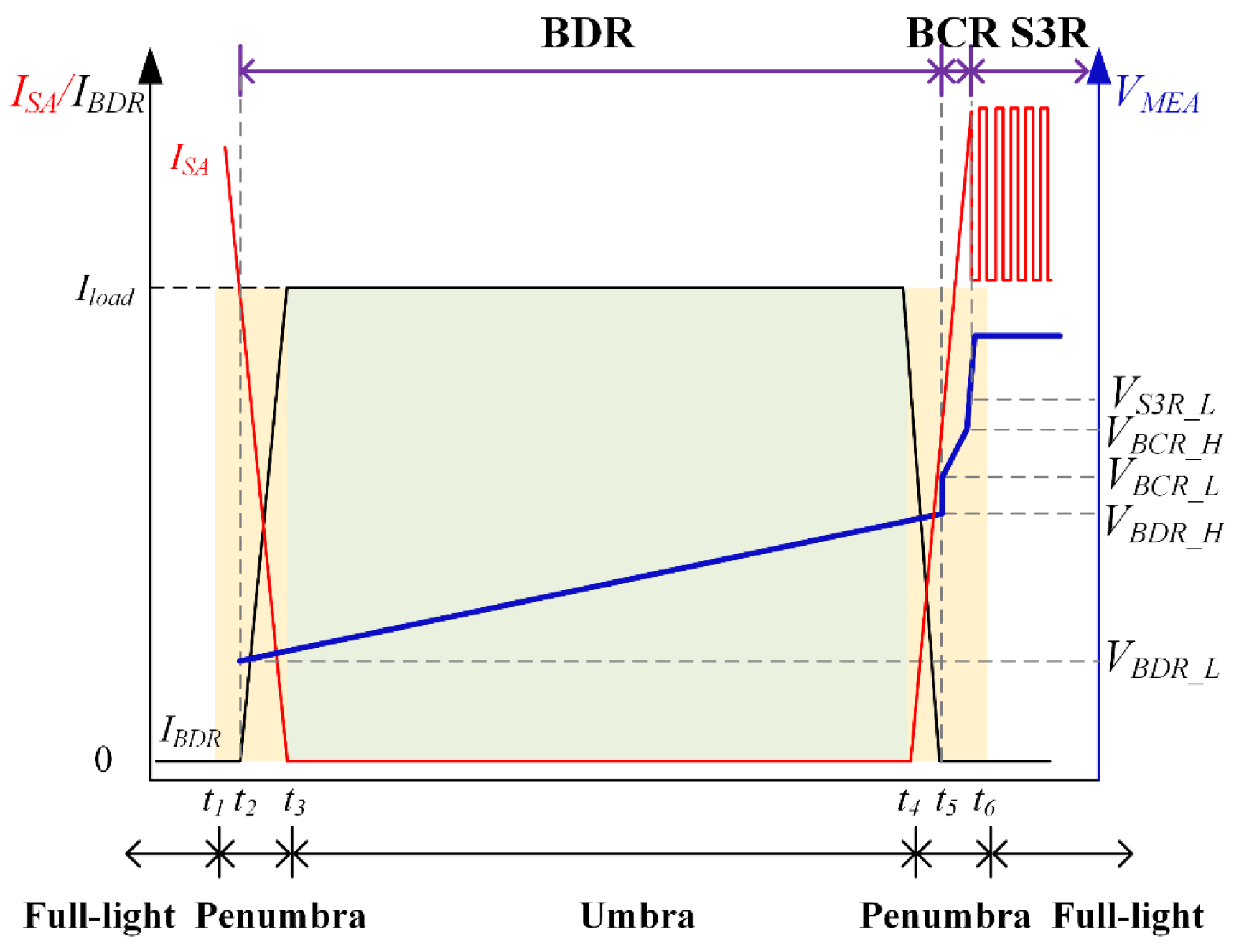
5.2. Hazard–Risk Evaluations
6. Simulations, Experiments and Results
6.1. Unexpected Energy of Solar Array
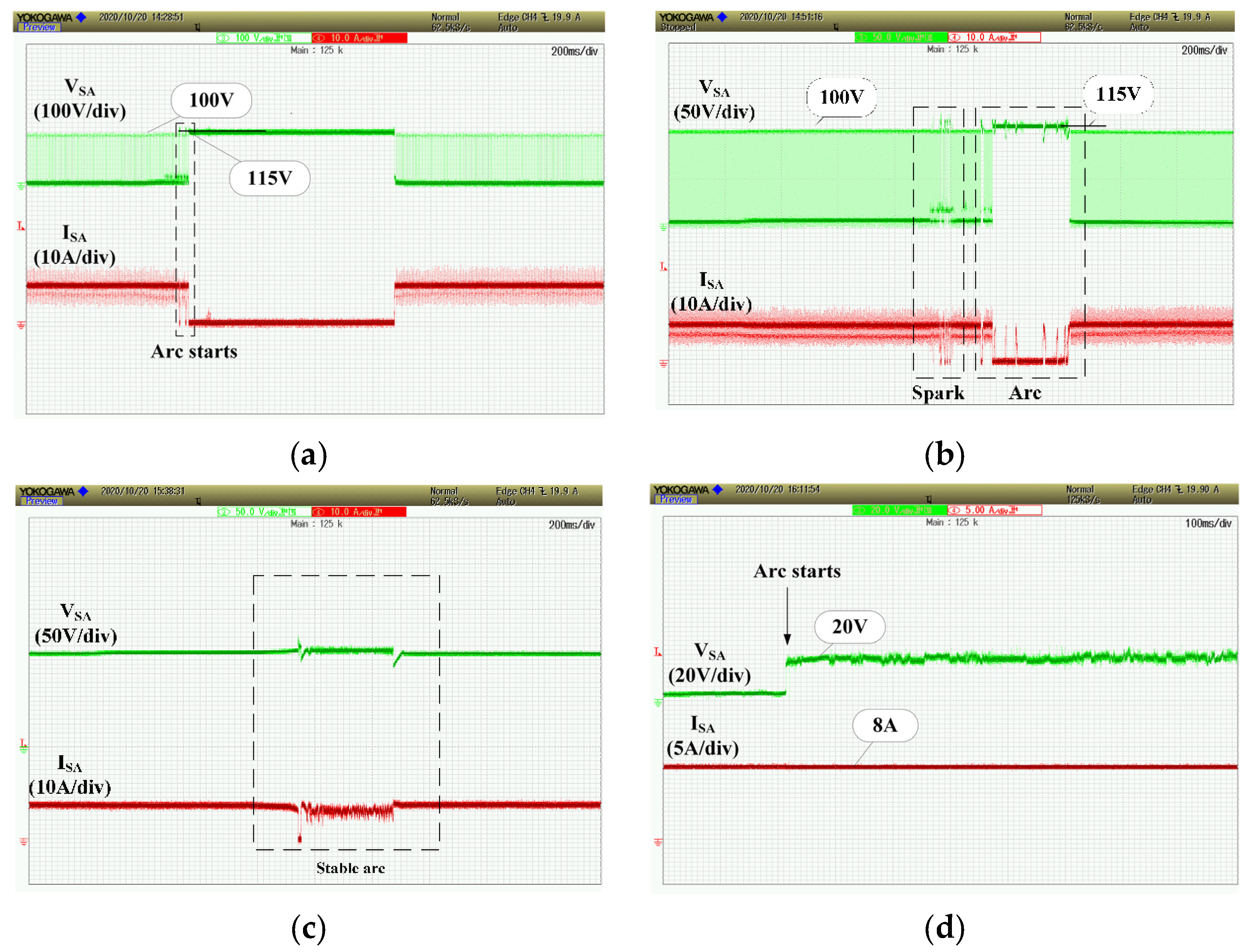
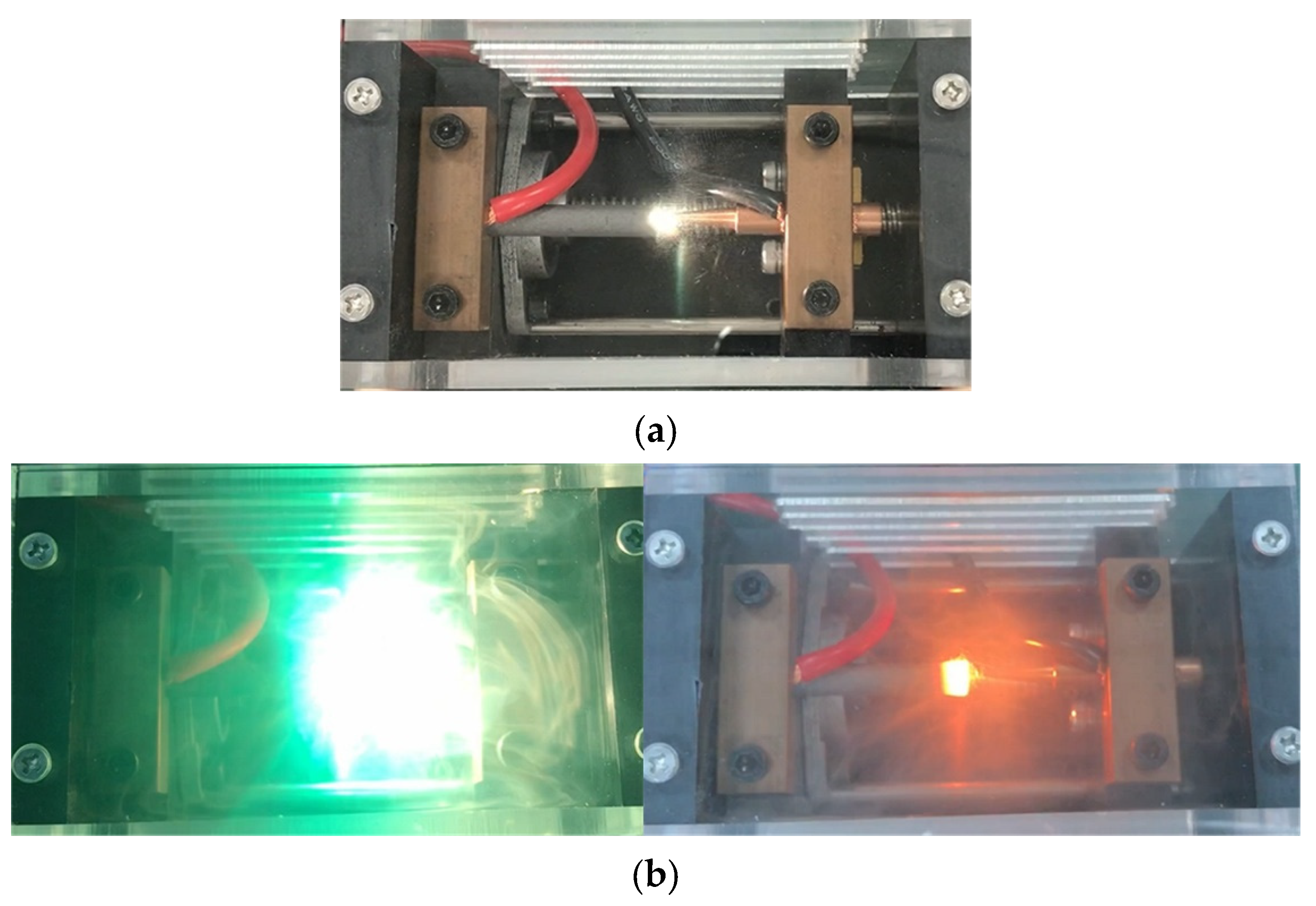
6.2. Arc Fault of SADA Slip Rings
6.3. Simulation of Non-Linear Phenomena of Solar Array and Load during the Earth Eclipse
7. Conclusions
- With an increase in unexpected energy, the current stress of the power device increases, the MOSFET switching frequency increases, and the power loss increases. At the same time, there may be over-regulation of the S3R, leading to “double sectioning” and, in severe cases, reduced quality of the bus voltage.
- The SADA vacuum arc fault has a serious effect on the power system reliability. Depending on the different working conditions and the locations at which the arc faults occur, the system has faults that include reduced solar array power supply capacity, frequent changes in the SR operation modes, and reduced bus voltage quality. At the same time, the high local temperatures generated by an arc discharge causes ablation and may even burn down the solar wings and the satellite power system, with potentially catastrophic consequences.
- The non-linear behavior of the solar array and the load during the Earth eclipse has a negative impact on the cross-domain regulation of the PCU. The fast switching of the load during the Earth eclipse period causes the PCU to repeatedly cross the domains and damage the battery charge and discharge regulator.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| Vbus | Bus Voltage |
| VMEA | Main Error Amplifier (MEA) Voltage |
| VHyst | Hysteresis Wide of Hysteresis Comparison |
| ΔVbus | Bus Voltage Ripple |
| ISA | Solar Array Current |
| Cbus | Bus Output Capacitance |
| fmax | Maximum Switching Frequency |
| Iph | Photogenerated Current |
| Rs | Series Resistance |
| Rsh | Shunt Resistance |
| Vcell | Solar Cell Voltage |
| Icell | Solar Cell Current |
| G | Light Intensity |
| ISC | Short Circuit Current |
| CSA | Solar Array Parasitic Capacitance |
| ΔI | Unexpected Current of Solar Array |
| ΔVbus_DSF | Maximum Bus Voltage Ripple |
| IR | Solar Array Rated Current |
| VR | Solar Array Rated Voltage |
| PSA | Solar Array Power |
| RR | Contact Resistance of SADA Slip Ring |
| PCU | Power Conditioning Unit |
| S3R | Sequential Switching Shunt Regulator |
| BDR | Battery Discharge Regulator |
| BCR | Battery Charge Regulator |
| MEA | Main Error Amplifier |
| SADA | Solar Array Drive Assembly |
| SA | Solar Array |
| SR | Shunt Regulator |
| ESD | Electrostatic Discharges |
| GEO | Geostationary Earth Orbit |
References
- Osullivan, D.; Weinberg, G. The sequential switching shunt regulator(S3R). Proc. Rec. ESTEC Spacecr. Power Cond. Seminar. 1977, 123–131. [Google Scholar]
- Cao, Y.; Cao, D.; Wei, J.; Huang, W. Modeling for solar array drive assembly system and compensating for the rotating speed fluctuation. Aerosp. Sci. Technol. 2018, 84, 131–142. [Google Scholar] [CrossRef]
- Yun, S.-T.; Kong, S.-H. Forecasting Methods of Battery Charge and Discharge Current Profile for LEO Satellites. Electronics 2021, 10, 2999. [Google Scholar] [CrossRef]
- Chen, J.; Wang, X.; Wang, T.; Wang, T. Analysis on Energy System Safety in GEO Satellite Complex Eclipse. In Proceedings of the 7th China Satellite Navigation Conference (CSNC 2016), Changsha, China, 18–20 May 2016. [Google Scholar]
- Yan, L.; Wang, C.; Song, S. Development of the Design and Analysis System for the Solar Array Drive Mechanism. In Proceedings of the 6th International Conference on Intelligent Human-Machine Systems & Cybernetics, Hangzhou, China, 26–27 August 2014; pp. 253–256. [Google Scholar]
- Avino, F.; Gaffinet, B.; Bommottet, D.; Howling, A.; Furno, I. Slip Ring Test Assembly with Increased Breakdown Voltage Limit for High-Voltage Bus Satellites. IEEE Aerosp. Electron. Syst. Mag. 2020, 35, 32–36. [Google Scholar] [CrossRef]
- Khan, A.R.; Minh, N.D.; Toyoda, K.; Cho, M. Electrostatic Discharge Threshold on Coverglass Used to Protect Solar Cells in the Low Earth Orbit. IEEE Trans. Plasma Sci. 2018, 47, 1445–1452. [Google Scholar] [CrossRef]
- Plis, E.A.; Engelhart, D.P.; Murray, V.J.; Sokolovskiy, A.N.; Barton, D.A.; Ferguson, D.C.; Hoffman, R.C. Effect of Simulated GEO Environment on the Properties of Solar Panel Coverglasses. IEEE Trans. Plasma Sci. 2021, 49, 1679–1685. [Google Scholar] [CrossRef]
- Fukushige, S.; Akahoshi, Y.; Watanabe, K.; Nagasaki, T.; Sugawara, K.; Koura, T.; Cho, M. Solar-Array Arcing Due to Plasma Created by Space-Debris Impact. IEEE Trans. Plasma Sci. 2008, 36, 2434–2439. [Google Scholar] [CrossRef]
- Tang, E.; Gao, G.; Liu, M.; Han, Y. Research on the Discharge and Mitigation Created by Ultra-high Velocity Impact on Solar Array With Applied Power Supply. IEEE Trans. Plasma Sci. 2018, 46, 3100–3108. [Google Scholar] [CrossRef]
- Goebel, D.M.; Filimonova, O.S. High Voltage Solar Array Development for Space and Thruster-Plume Plasma Environments. IEEE Trans. Plasma Sci. 2022, 50, 721–730. [Google Scholar] [CrossRef]
- Ose, T.; Sanmaru, Y.; Kitamura, T.; Hosoda, S.; Cho, M. Emission spectral analysis of arc plasma on solar array in GEO environment. In Proceedings of the 2006 International Symposium on Discharges and Electrical Insulation in Vacuum, Matsue, Japan, 25–29 September 2006. [Google Scholar]
- Meng, Y.; Zhang, D.; Zhu, H. Negative Effects of Unexpected Energy on Sequential Switching Shunt Regulator and Suppression Methods for High-Power Satellite. IEEE Trans. Aerosp. Electron. Syst. 2021, 1. [Google Scholar] [CrossRef]
- Ji, X.-Y.; Li, Y.-Z.; Liu, G.-Q.; Wang, J.; Xiang, S.-H.; Yang, X.-N.; Bi, Y.-Q. A brief review of ground and flight failures of Chinese spacecraft. Prog. Aerosp. Sci. 2019, 107, 19–29. [Google Scholar] [CrossRef]
- Shen, L.; Wang, X.; Wang, Y.; Jing, G.; Li, C. Vacuum Arc Discharge Test of Aerospace Disc Slip Ring with Metallic Wear Debris. Spacecr. Environ. Eng. 2019, 36, 463–467. [Google Scholar]
- Lundin, B.T. Report of the Seasat Failure Review Board. NASA Tech. Rep. Serv. 1978, 1–98. [Google Scholar]
- Wang, X.; Min, D.; Pan, S.; Zheng, S.; Hou, X.; Wang, L.; Li, S. Coupling Effect of Electron Irradiation and Operating Voltage on the Deep Dielectric Charging Characteristics of Solar Array Drive Assembly. IEEE Trans. Nucl. Sci. 2021, 68, 1399–1406. [Google Scholar] [CrossRef]
- Jing, G.; Shen, L.; Wang, X.; Wang, Y.; Li, C.; Li, W. Experimental study of vacuum charge and discharge of the slip ring in spacecraft solar array drive mechanism. Spacecr. Environ. Eng. 2021, 38, 166–170. [Google Scholar]
- Sun, Y.; Wang, Y.; Sun, X.; Liu, X.; Yu, J. Research on failure modeling and process optimization of transmission conductive slip ring for aerospace. J. Mech. Eng. 2020, 56, 1–12. [Google Scholar]
- Wang, J.; Liu, R.; Xiao, R.; Ping, A.; Liu, J.; Zhang, M.; Li, Q. Optimized Design of Slip Ring Assembly for Aerospace to Reduce Deep Dielectric Charging. IEEE Trans. Nucl. Sci. 2022, 69, 915–924. [Google Scholar] [CrossRef]
- Khan, O.; El Moursi, M.; Zeineldin, H.; Khadkikar, V.; Al Hosani, M. Comprehensive design and control methodology for DC-powered satellite electrical subsystem based on PV and battery. IET Renew. Power Gener. 2020, 14, 2202–2210. [Google Scholar] [CrossRef]
- Parthasarathy, V.; Ferguson, P. Modelling and simulation of the power subsystem of a low earth orbit CubeSat. Aerosp. Syst. 2020, 3, 139–146. [Google Scholar] [CrossRef]
- Cao, Z.; Ding, H. Analysis of the Primary Power Supply System of a GSO Satellite in Eclipse Seasons. J. Spacecr. TTC Technol. 2013, 32, 27–31. [Google Scholar]
- Langer, M.; Bouwmeester, J. Reliability of CubeSats-statistical data, developers’ Beliefs and the way forward. In Proceedings of the 30th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 6–11 August 2016. [Google Scholar]
- Zhu, H.; Zhang, D. Influence of multijunction Ga/As solar array in usage in S3R and solving methods for high-power applications. IEEE Trans. Power Electron. 2014, 29, 179–190. [Google Scholar] [CrossRef]
- Zhu, H.; Zhang, D. Design Considerations of Sequential Switching Shunt Regulator for High-Power Applications. IEEE Trans. Ind. Electron. 2019, 67, 9358–9369. [Google Scholar] [CrossRef]
- Benghanem, M.S.; Alamri, S.N. Modeling of photovoltaic module and experimental determination of serial resistance. J. Taibah Univ. Sci. 2009, 2, 94–105. [Google Scholar] [CrossRef]
- Subramanian, V.; Indragandhi, V.; Kuppusamy, R.; Teekaraman, Y. Modeling and Analysis of PV System with Fuzzy Logic MPPT Technique for a DC Microgrid under Variable Atmospheric Conditions. Electronics 2021, 10, 2541. [Google Scholar] [CrossRef]
- Zhang, K.; Zhang, Q.M.; Long, R.R. The Experiment Study on Flash Spectrum Produced by Hypervelocity Impact. Appl. Mech. Mater. 2015, 782, 197–203. [Google Scholar] [CrossRef]
- Fang, L.; You, X.; Yan, L. Control loop design of sequential switching shunt regulator considering the influence of double section functioning. IET Power Electron. 2014, 7, 998–1007. [Google Scholar]
- Li, H.; Wang, S.; Lu, J.; You, X.; Yu, X. Stability Analysis of the Shunt Regulator with Nonlinear Controller in PCU Based on Describing Function Method. IEEE Trans. Ind. Electron. 2016, 64, 2044–2053. [Google Scholar] [CrossRef]
- Feng, W.; Han, G.; Liu, Y.; Wang, Z.; Xu, Y.; Yu, D. Spacecraft EPDS Arc Short Circuit Failure and Prevention. Spacecr. Eng. 2013, 22, 65–70. [Google Scholar]
- Fixler, Z.S. Umbra and penumbra eclipse factors for satellite orbits. AIAA J. 2015, 2, 1455–1457. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Bus voltage | 100 V |
| Bus voltage ripple | 600 mv |
| Solar array sections | 18 A × 2 sections |
| Harness inductance LH | 28 mu H |
| Power inductor L1 | 60 mu H |
| The sampling resistor Rsen | 2.5 m Ω |
| Bus capacitance | 3.0 mF |
| MEA voltage divider K | 0.064 |
| MEA: R1 | 2.35 kΩ |
| MEA: R2 | 103.75 kΩ |
| MEA: C1 | 10 nF |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, Y.; Zhang, D.; Wang, C.; Liu, Z.; Zhu, L.; Li, A. Modeling and Analysis of Non-Linear Phenomena of Satellite Power System in Space Environment and Hazard-Risk Evaluations. Electronics 2022, 11, 1756. https://doi.org/10.3390/electronics11111756
Meng Y, Zhang D, Wang C, Liu Z, Zhu L, Li A. Modeling and Analysis of Non-Linear Phenomena of Satellite Power System in Space Environment and Hazard-Risk Evaluations. Electronics. 2022; 11(11):1756. https://doi.org/10.3390/electronics11111756
Chicago/Turabian StyleMeng, Yanchen, Donglai Zhang, Chao Wang, Zhigang Liu, Liying Zhu, and Anshou Li. 2022. "Modeling and Analysis of Non-Linear Phenomena of Satellite Power System in Space Environment and Hazard-Risk Evaluations" Electronics 11, no. 11: 1756. https://doi.org/10.3390/electronics11111756
APA StyleMeng, Y., Zhang, D., Wang, C., Liu, Z., Zhu, L., & Li, A. (2022). Modeling and Analysis of Non-Linear Phenomena of Satellite Power System in Space Environment and Hazard-Risk Evaluations. Electronics, 11(11), 1756. https://doi.org/10.3390/electronics11111756