
Statistical Analysis of the Effectiveness of Wearable Robot

Abstract
1. Introduction
2. Methods
2.1. Participants
2.2. Materials
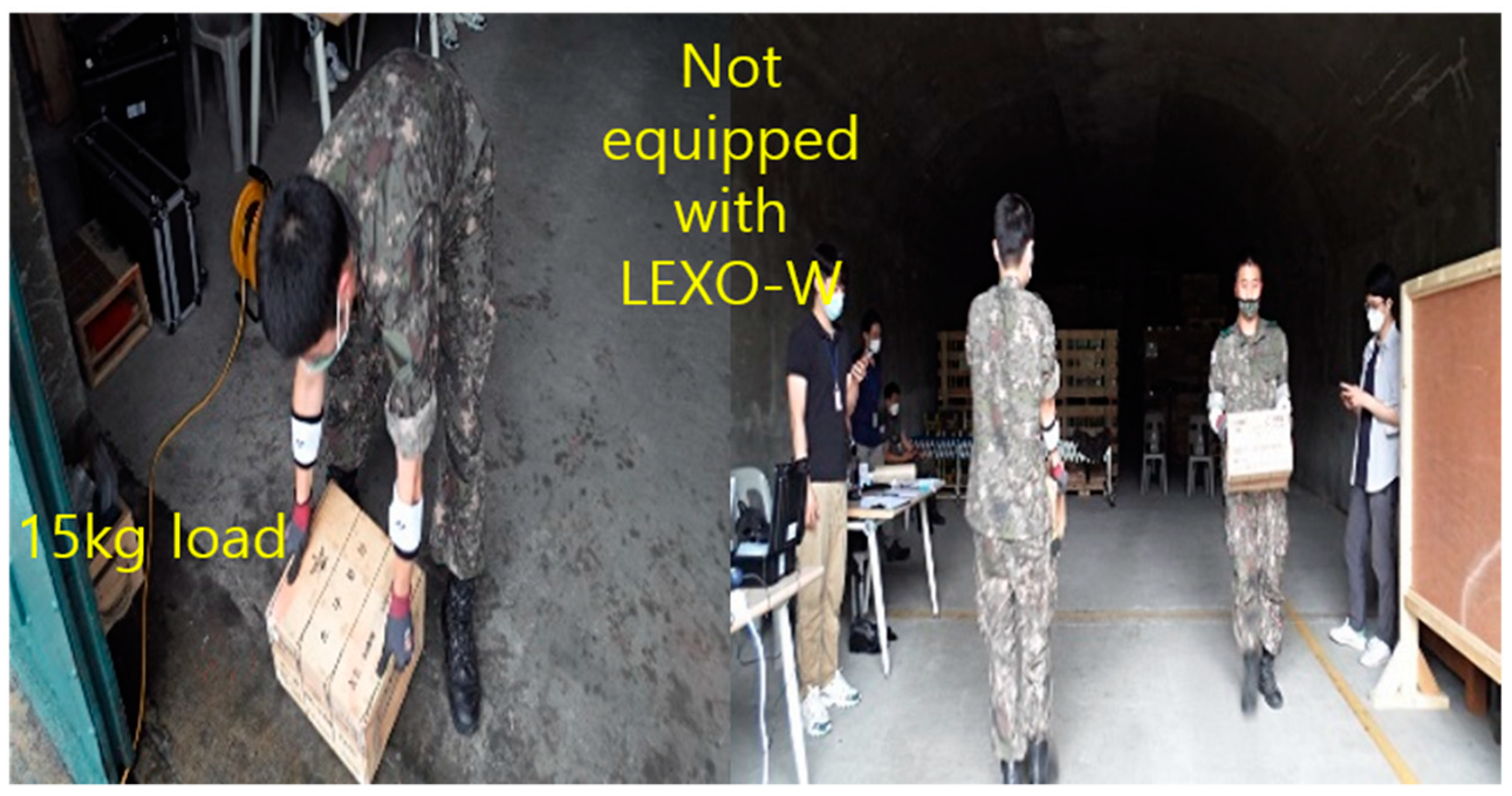
2.3. Experimental Procedure
2.4. Experiment Variables and Satistical Analysis
3. Results
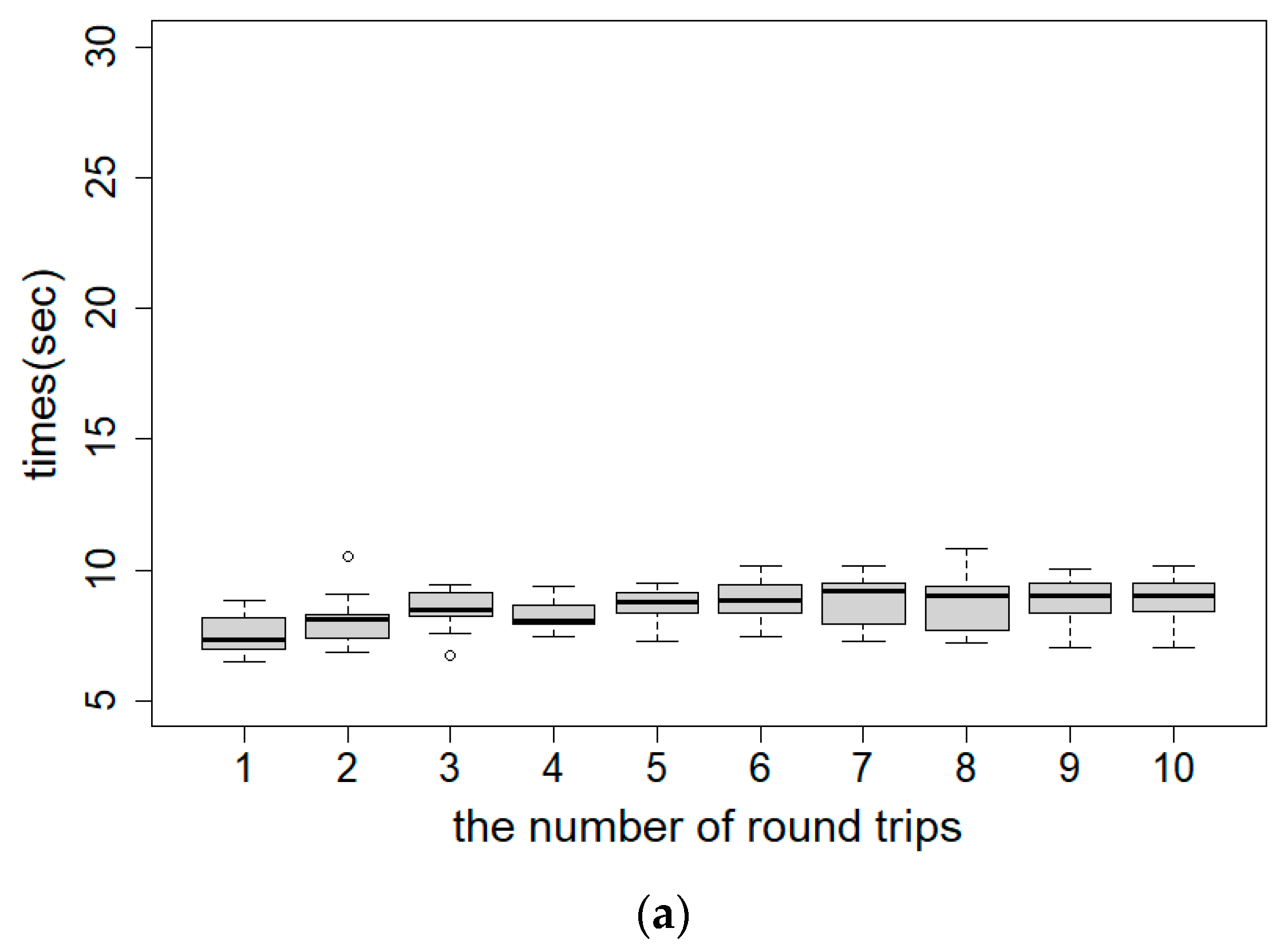
3.1. Descriptive Statisticts
3.2. Comparing Groups for Statistical Differences
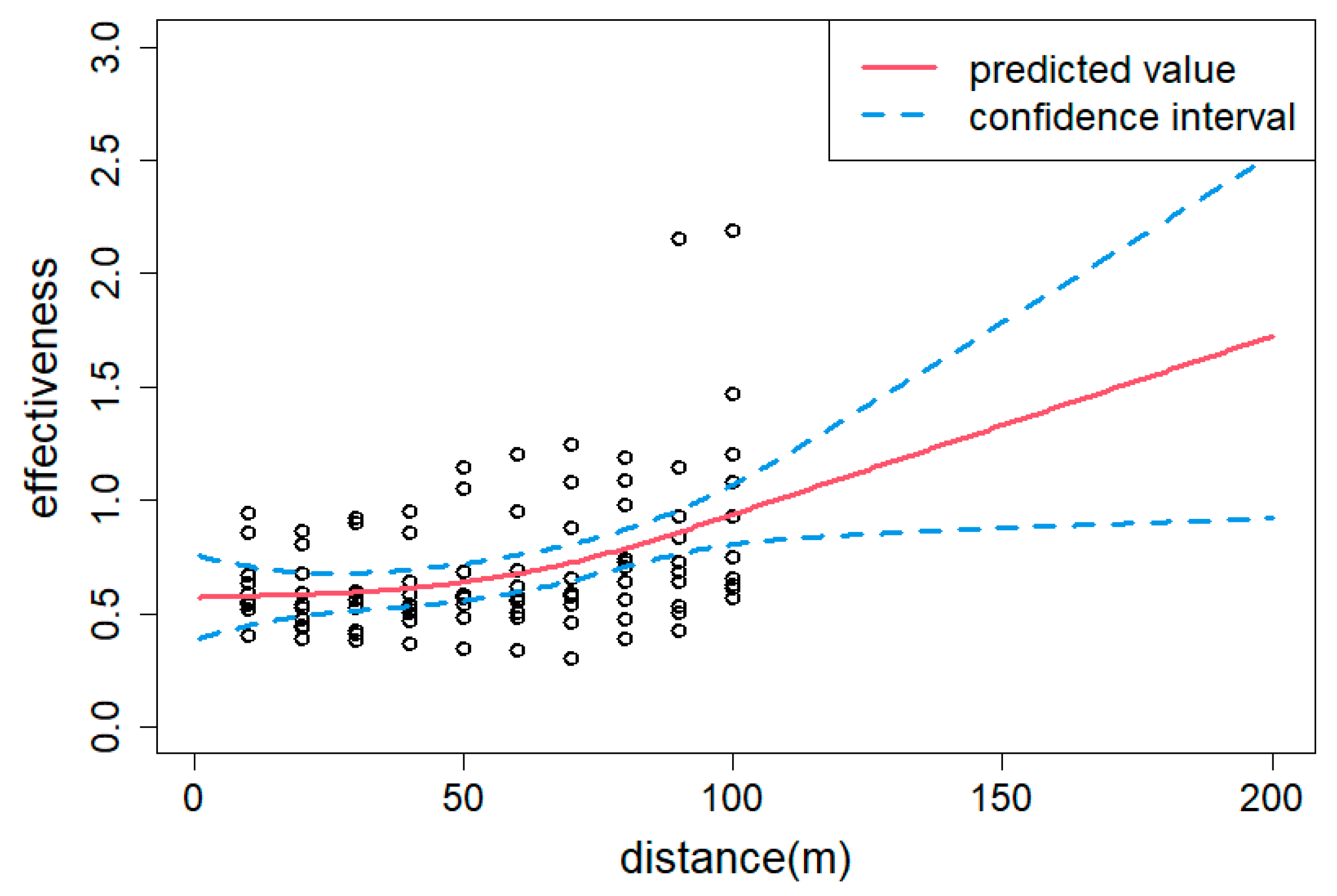
3.3. Prediction of Work Efficiency with the Wearable Robot using the Generalized Additive Model (GAM)
4. Discussion and Conclusions
- In general, the increasing number of round trips causes an increment in lap time. Particularly, the load-carrying group shows a rapidly upward trend in lap time over the number of round trips. This proves that walking with a 15 kg load causes more fatigue;
- An unexpected result was that the robot-assisted group showed a slightly upward trend in lap time over the number of round trips. The reason is that the wearable robot helps in the reduction of physical fatigue;
- The average lap time in the robot-assisted group is higher than in the other groups. This is evidence that the wearable robot does not fully fulfill the requirement for providing comfort and smooth interaction with each human user. It shows that the appropriate ergonomic design of a wearable robot should be considered;
- The result based on the repeated measure ANOVA analysis is not enough to prove that the robot-assisted group achieves the best performance. Since our experimental condition is 10 round trips, it is difficult to test the effectiveness of the wearable robot when one is consistently equipped with the wearable robot. Therefore, we have predicted the effectiveness over distance using the GAM model and evaluated the effectiveness. The effectiveness has increased as the moving distance increased (the number of round trips). The wearable robot works well to reduce physical fatigue in spite of the poor ergonomics of the design.
Author Contributions
Funding
Conflicts of Interest
References
- Dhand, S.; Ashish, S.; Gurvinder, S.V. A brief review on human-powered lower-limb exoskeletons. In Proceedings of the Conference on Mechanical Engineering and Technology (COMET-2016), Varanasi, India, 15–17 January 2016; pp. 116–122. [Google Scholar]
- Ferris, D.P.; Bryan, R.S. Robotic devices to enhance human movement performance. Kinesiol. Rev. 2017, 6, 70–77. [Google Scholar] [CrossRef]
- Cha, D.; Kim, K.I. A lower limb exoskeleton based on recognition of lower limb walking intention. Trans. Can. Soc. Mech. 2019, 43, 102–111. [Google Scholar] [CrossRef]
- Gallagher, S.; Pollard, J.; Porter, W.L. Electromyography of the thigh muscles during lifting tasks in kneeling and squatting postures. Ergonomics 2011, 54, 91–102. [Google Scholar] [CrossRef] [PubMed]
- González-Vargas, J.; Ibánez, J.; Contreras-Vidal, J.L.; van der Kooij, H.; Pons, J.L. Wearable robotics: Challenges and trends. In Proceedings of the 2nd International Symposium on Wearable Robotics, WeRob2016, Segovia, Spain, 18–21 October 2016. [Google Scholar]
- Schiele, A. An explicit model to predict and interpret constraint force creation in phri with exoskeletons. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1324–1330. [Google Scholar]
- Millard, M.; Sreenivasa, M.; Mombaur, K. Predicting the motions and forces of wearable robotic systems using optimal control. Front. Robot. AI 2017, 4, 41. [Google Scholar] [CrossRef]
- Bonilla, B.L.; Asada, H.H. A robot on the shoulder: Coordinated human-wearable robot control using coloured petri nets and partial least squares predictions. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 119–125. [Google Scholar]
- Song, G.; Huang, R.; Qiu, J.; Cheng, H.; Fan, S. Model-based control with interaction predicting for human-coupled lower exoskeleton systems. J. Intell. Robot. Syst. 2020, 100, 389–400. [Google Scholar] [CrossRef]
- Wu, G.; Wang, C.; Wu, X.; Wang, Z.; Ma, Y.; Zhang, T. Gait phase prediction for lower limb exoskeleton robots. In Proceedings of the 2016 IEEE International Conference on Information and Automation (ICIA), Ningbo, China, 1–3 August 2016; pp. 19–24. [Google Scholar]
- Dollar, M.; Herr, H. Lower Extremity Exoskeletons and Active Orthoses; Challenges and State-of-the-Art. IEEE Trans. Robot. 2008, 24, 144–158. [Google Scholar] [CrossRef]
- Olivier. Shiva Exo: Le Premier Exo-Squelette 100% Français Utilisé par Airbus Helicopters. 2019. Available online: https://www.journaldugeek.com/2019/04/13/shiva-exo-premier-exo-squelette-100-francais-sera-utilise-airbus-helicopters/ (accessed on 21 December 2020).
- SuitX. MAX (Modular Agile eXoskeleton). Available online: https://www.suitx.com/shoulderx (accessed on 5 January 2021).
- Ottobock. Paexo Back Exoskelett–Entlastung des Rückens–Ottobock Industrials. Available online: https://paexo.com/paexo-back/?lang=en (accessed on 5 January 2021).
- Ottobock. Support for the Logistics Sector: New Exoskeleton Offers Relief for the Back. Available online: https://www.ottobock.com/en/newsroom/news/paexo-back.html (accessed on 5 January 2021).
- Pesenti, M.; Antoneitti, A.; Gandolla, M.; Pedorocchi, A. Towards a functional performance validation standard for industrial low-back exoskeletons: State of the art review. Sensors 2021, 21, 808. [Google Scholar] [CrossRef] [PubMed]
- Kao, P.C.; Lewis, C.L.; Ferris, D.P. Invariant ankle moment patterns when walking with and without a robotic ankle exoskeleton. J. Biomech. 2009, 43, 203–209. [Google Scholar] [CrossRef] [PubMed]
- Jackson, R.W.; Collins, S.H. An experimental comparison of the relative benefits of work and torque assistance in ankle exoskeleton. J. Appl. Physiol. 2015, 119, 541–557. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Seo, K.; Lim, B.; Jang, J.; Kim, K.; Choi, H. Effects of assistance timing on metabolic cost, assistance power, and gait parameters for a hip type exoskeleton. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 498–504. [Google Scholar]
- McGibbon, C.; Sexton, A.; Jayaraman, A.; Deems-Dluhy, S.; Fabara, E.; Adans-Dester, C.; Bonato, P.; Marquis, F.; Turmel, S.; Belzile, E. Evaluation of a Lower-Extremity Robotic Exoskeleton for People with Knee Osteoarthritis. Assist. Technol. 2021. [Google Scholar] [CrossRef] [PubMed]
- Toxiri, S.; Näf, M.B.; Lazzaroni, M.; Fernández, J.; Sposito, M.; Poliero, T.; Monica, L.; Anastasi, S.; Caldwell, D.G.; Ortiz, J. Back-Support Exoskeletons for Occupational Use: An Overview of Technological Advances and Trends. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 237–249. [Google Scholar] [CrossRef]
- Di Lallo, A.; Yu, S.; Huang, T.-H.; Bulea, T.C.; Su, H. High-performance soft wearable robots for human augmentation and gait rehabilitation. Soft Robot. Rehabil. 2021, 1–38. [Google Scholar] [CrossRef]
- Bär, M.; Steinhilber, B.; Rieger, M.A.; Luger, T. The influence of using exoskeletons during occupational tasks on acute physical stress and strain compared to no exoskeleton—A systematic review and meta-analysis. Appl. Ergon. 2021, 94, 103385. [Google Scholar] [CrossRef] [PubMed]
- Asl, H.J.; Katagiri, K.; Narikiyo, T.; Yamashita, M.; Kawanishi, M. Augmenting human power by assistive robots: Application of adaptive neural networks. Control Eng. Pract. 2021, 110, 104769. [Google Scholar] [CrossRef]
- KSME. LEXO-WLhwp. Available online: ksme.or.kr (accessed on 5 January 2021).
- Hastie, T.; Tibshirani, R. Generalized additive models. Stat. Sci. 1986, 1, 297–310. [Google Scholar] [CrossRef]
- Ruppert, D.; Wand, M.P.; Carroll, R.J. Semiparametric Regression; Cambridge University Press: New York, NY, USA, 2003. [Google Scholar]
- Fahrmeir, L.; Kneib, T.; Lang, S.; Marx, B. Regression Models; Springer: New York, NY, USA, 2013. [Google Scholar]
- Wood, S. Generalized Additive Models: An Introduction with R, 2nd ed.; Chapman and Hall/CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Wood, S. Fast stable restricted maximum likelihood and marginal likelihood estimation of semiparametric generalized linear models. J. R. Stat. Soc. Ser. B Stat. Methodol. 2011, 73, 3–36. [Google Scholar] [CrossRef]
- Wood, S. Mixed GAM Computation Vehicle with GCV/AIC/REML Smoothness Estimation. R Package Version, 1.8-35. Available online: https://cran.r-project.org/web/packages/mgcv (accessed on 22 February 2021).
- Vonesh, E.F.; Chinchilli, V.M. Linear and Nonlinear Models for the Analysis of Repeated Measurements; CRC Press: Boca Raton, FL, USA, 1997. [Google Scholar]
- Sullivan, L.; Weinberg, J.; Keaney, J. Common Statistical Pitfalls in Basic Science Research. J. Am. Heart Assoc. 2016, 5, e004142. [Google Scholar] [CrossRef] [PubMed]
- Hand, D.; Taylor, C. Multivariate Analysis of Variance and Repeated Measures; Chapman and Hall: London, UK, 1987. [Google Scholar]
- Crowder, M.J.; Hand, D. Analysis of Repeated Measures; Chapman and Hall: London, UK, 1990. [Google Scholar]
- Liu, C.; Cripe, T.P.; Kim, M.O. Statistical issues in longitudinal data analysis for treatment efficacy studies in the biomedical sciences. Am. Soc. Gene Cell Ther. 2010, 18, 1724–1730. [Google Scholar] [CrossRef] [PubMed]
- Hirotsu, C. An Approach to Comparing Treatments Based on Repeated Measures. Biometrika 1991, 78, 583–594. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ages | Height (cm) | Weight (kg) | BMI (kg/m2) | |
|---|---|---|---|---|
| Mean | 21.7 | 176.8 | 72.0 | 23.03 |
| SD | 1.06 | 3.61 | 9.72 | 2.81 |
| Min | 20 | 173 | 61 | 19.3 |
| Max | 23 | 183 | 92 | 27.5 |
| Group | The Number of Round Trips | Totals | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||
| baseline group | 7.6 (0.77) | 8.2 (1.04) | 8.4 (0.81) | 8.3 (0.63) | 8.7 (0.65) | 8.8 (0.85) | 8.9 (0.94) | 8.8 (1.06) | 8.8 (0.98) | 8.8 (0.99) | 8.52 (0.94) |
| load-carrying group | 8.3 (1.44) | 9.03 (1.14) | 9.67 (1.25) | 10.1 (1.46) | 11.0 (1.69) | 11.5 (1.86) | 12.0 (2.37) | 13.4 (2.80) | 14.8 (4.80) | 18.6 (5.30) | 11.7 (3.78) |
| Robot-assisted group | 13.6 (1.58) | 16.4 (3.21) | 17.3 (3.37) | 17.9 (2.82) | 17.7 (3.43) | 18.6 (3.78) | 18.9 (4.17) | 18.8 (3.33) | 19.0 (4.17) | 18.9 (4.63) | 17.7 (3.73) |
| Source | SS | DF | MS | F | p-Value |
|---|---|---|---|---|---|
| group | 4333 | 2 | 2166.3 | 33.74 | 0.000 *** |
| number | 633.1 | 9 | 70.34 | 30.59 | 0.000 *** |
| Group × number | 354.4 | 18 | 19.687 | 7.96 | 0.000 *** |
| Source | RMSE | GCV | R2adj |
|---|---|---|---|
| Simple Linear Regression | 1.007 | 0.100 | 0.111 |
| Generalized Additive Model | 0.978 | 0.098 | 0.131 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, G.; Cha, D. Statistical Analysis of the Effectiveness of Wearable Robot. Electronics 2021, 10, 1006. https://doi.org/10.3390/electronics10091006
Lee G, Cha D. Statistical Analysis of the Effectiveness of Wearable Robot. Electronics. 2021; 10(9):1006. https://doi.org/10.3390/electronics10091006
Chicago/Turabian StyleLee, Giwhyun, and Dowan Cha. 2021. "Statistical Analysis of the Effectiveness of Wearable Robot" Electronics 10, no. 9: 1006. https://doi.org/10.3390/electronics10091006
APA StyleLee, G., & Cha, D. (2021). Statistical Analysis of the Effectiveness of Wearable Robot. Electronics, 10(9), 1006. https://doi.org/10.3390/electronics10091006